
哈尔滨工业大学工学硕士学位论文 蛇形曲线上相邻两极小点;2)不同基本曲线段可具有不同的弧长;3)在某一给 定时刻,蛇形曲线中包括数个基本曲线段,但并不是每一个基本曲线段都会被 完全的形成:4)蜿蜒运动过程中蛇体的运动近似于正弦波在蛇体上传播,可以证 明蛇体的运动方向与正弦波的传播方向相反。 (2)直线运动身体粗大的蛇类,例如蟒蛇,则常是直线向前爬行。直线 运动是依靠肌肉收缩来实现的,肌肉收缩使得腹部鳞片进行齿轮式的活动,皮 肤相对骨骼移动,从而实现直线运动的方式,如图24所示。由于伸缩移动的距 离非常小,因此直线运动效率非常低。 图2-4蛇的直线运动示意图B4 (3)伸缩运动蛇在通过狭长的管道时,通常采用这种运动方式,如图2- 5所示。该运动可分为两个节拍,首先以前部作为支撑,收缩肌肉向前拉动后 部,再以后部作为支撑,通过肌肉收缩向前推动前部。 (4)侧向运动侧向运动方式比较常见于沙漠中的蛇类,在运动过程中蛇 体腹部始终都只有很小一部分与地面接触,避免了腹部与炎热的沙地大面积接 触。运动时从头部开始,蛇体各部分顺序接触地面,然后抬起,依次循环,产 生一个侧向的运动,如图2-6所示。这种运动效率比较高,适合在柔软的沙地运 动。 以上为蛇的主要运动方式,此外,蛇类还有一些其他的运动方式,例如钻 洞、绕身体脊椎的回转、滑行冲击、蠕虫运动等等。 图2-5蛇在管道中的伸缩运动 图2-6蛇的侧向运动 -9
哈尔滨工业大学工学硕士学位论文 - 9 - ,则常是直线向前爬行。直线 运动 蛇形曲线上相邻两极小点; 2)不同基本曲线段可具有不同的弧长;3)在某一给 定时刻,蛇形曲线中包括数个基本曲线段,但并不是每一个基本曲线段都会被 完全的形成;4)蜿蜒运动过程中蛇体的运动近似于正弦波在蛇体上传播,可以证 明蛇体的运动方向与正弦波的传播方向相反[19]。 (2)直线运动 身体粗大的蛇类,例如蟒蛇 是依靠肌肉收缩来实现的,肌肉收缩使得腹部鳞片进行齿轮式的活动,皮 肤相对骨骼移动,从而实现直线运动的方式,如图 2-4 所示。由于伸缩移动的距 离非常小,因此直线运动效率非常低。 图 2-4 蛇的直线运动示意图[34] (3)伸缩运动 蛇在通过狭长的管道时,通常采用这种运动方式,如图 2- 5 所 蛇类,在运动过程中蛇 体腹 上为蛇的主要运动方式,此外,蛇类还有一些其他的运动方式,例如钻 洞、 示。该运动可分为两个节拍,首先以前部作为支撑,收缩肌肉向前拉动后 部,再以后部作为支撑,通过肌肉收缩向前推动前部。 (4)侧向运动 侧向运动方式比较常见于沙漠中的 部始终都只有很小一部分与地面接触,避免了腹部与炎热的沙地大面积接 触。运动时从头部开始,蛇体各部分顺序接触地面,然后抬起,依次循环,产 生一个侧向的运动,如图 2-6 所示。这种运动效率比较高,适合在柔软的沙地运 动。 以 绕身体脊椎的回转、滑行冲击、蠕虫运动等等。 图 2-5 蛇在管道中的伸缩运动 图 2-6 蛇的侧向运动
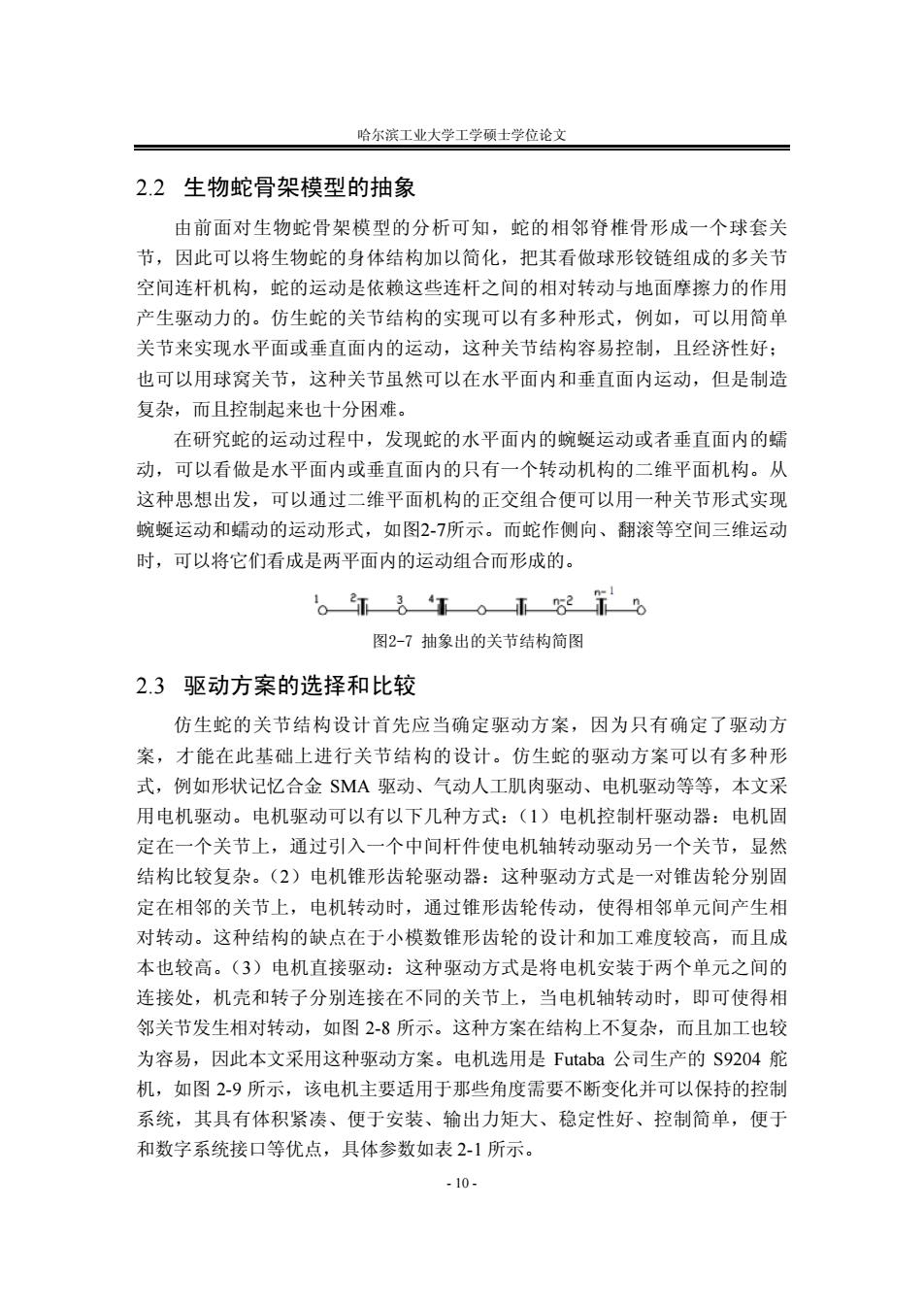
哈尔滨工业大学工学硕士学位论文 2.2生物蛇骨架模型的抽象 由前面对生物蛇骨架模型的分析可知,蛇的相邻脊椎骨形成一个球套关 节,因此可以将生物蛇的身体结构加以简化,把其看做球形铰链组成的多关节 空间连杆机构,蛇的运动是依赖这些连杆之间的相对转动与地面摩擦力的作用 产生驱动力的。仿生蛇的关节结构的实现可以有多种形式,例如,可以用简单 关节来实现水平面或垂直面内的运动,这种关节结构容易控制,且经济性好: 也可以用球窝关节,这种关节虽然可以在水平面内和垂直面内运动,但是制造 复杂,而且控制起来也十分困难。 在研究蛇的运动过程中,发现蛇的水平面内的蜿蜒运动或者垂直面内的蠕 动,可以看做是水平面内或垂直面内的只有一个转动机构的二维平面机构。从 这种思想出发,可以通过二维平面机构的正交组合便可以用一种关节形式实现 蜿蜒运动和蠕动的运动形式,如图2-7所示。而蛇作侧向、翻滚等空间三维运动 时,可以将它们看成是两平面内的运动组合而形成的。 。T8红0重26 图2-7抽象出的关节结构简图 2.3驱动方案的选择和比较 仿生蛇的关节结构设计首先应当确定驱动方案,因为只有确定了驱动方 案,才能在此基础上进行关节结构的设计。仿生蛇的驱动方案可以有多种形 式,例如形状记忆合金SMA驱动、气动人工肌肉驱动、电机驱动等等,本文采 用电机驱动。电机驱动可以有以下几种方式:(1)电机控制杆驱动器:电机固 定在一个关节上,通过引入一个中间杆件使电机轴转动驱动另一个关节,显然 结构比较复杂。(2)电机锥形齿轮驱动器:这种驱动方式是一对锥齿轮分别固 定在相邻的关节上,电机转动时,通过锥形齿轮传动,使得相邻单元间产生相 对转动。这种结构的缺点在于小模数锥形齿轮的设计和加工难度较高,而且成 本也较高。(3)电机直接驱动:这种驱动方式是将电机安装于两个单元之间的 连接处,机壳和转子分别连接在不同的关节上,当电机轴转动时,即可使得相 邻关节发生相对转动,如图2-8所示。这种方案在结构上不复杂,而且加工也较 为容易,因此本文采用这种驱动方案。电机选用是Futaba公司生产的S9204舵 机,如图2-9所示,该电机主要适用于那些角度需要不断变化并可以保持的控制 系统,其具有体积紧凑、便于安装、输出力矩大、稳定性好、控制简单,便于 和数字系统接口等优点,具体参数如表2-1所示。 -10-
哈尔滨工业大学工学硕士学位论文 - 10 - 2.2 生物蛇骨架模型的抽象 析可知,蛇的相邻脊椎骨形成一个球套关 节, 蛇的水平面内的蜿蜒运动或者垂直面内的蠕 动, 由前面对生物蛇骨架模型的分 因此可以将生物蛇的身体结构加以简化,把其看做球形铰链组成的多关节 空间连杆机构,蛇的运动是依赖这些连杆之间的相对转动与地面摩擦力的作用 产生驱动力的。仿生蛇的关节结构的实现可以有多种形式,例如,可以用简单 关节来实现水平面或垂直面内的运动,这种关节结构容易控制,且经济性好; 也可以用球窝关节,这种关节虽然可以在水平面内和垂直面内运动,但是制造 复杂,而且控制起来也十分困难。 在研究蛇的运动过程中,发现 可以看做是水平面内或垂直面内的只有一个转动机构的二维平面机构。从 这种思想出发,可以通过二维平面机构的正交组合便可以用一种关节形式实现 蜿蜒运动和蠕动的运动形式,如图2-7所示。而蛇作侧向、翻滚等空间三维运动 时,可以将它们看成是两平面内的运动组合而形成的。 图2-7 抽象出的关节结构简图 2.3 驱动方案的选择和比较 当确定驱动方案,因为只有确定了驱动方 案, 仿生蛇的关节结构设计首先应 才能在此基础上进行关节结构的设计。仿生蛇的驱动方案可以有多种形 式,例如形状记忆合金 SMA 驱动、气动人工肌肉驱动、电机驱动等等,本文采 用电机驱动。电机驱动可以有以下几种方式:(1)电机控制杆驱动器:电机固 定在一个关节上,通过引入一个中间杆件使电机轴转动驱动另一个关节,显然 结构比较复杂。(2)电机锥形齿轮驱动器:这种驱动方式是一对锥齿轮分别固 定在相邻的关节上,电机转动时,通过锥形齿轮传动,使得相邻单元间产生相 对转动。这种结构的缺点在于小模数锥形齿轮的设计和加工难度较高,而且成 本也较高。(3)电机直接驱动:这种驱动方式是将电机安装于两个单元之间的 连接处,机壳和转子分别连接在不同的关节上,当电机轴转动时,即可使得相 邻关节发生相对转动,如图 2-8 所示。这种方案在结构上不复杂,而且加工也较 为容易,因此本文采用这种驱动方案。电机选用是 Futaba 公司生产的 S9204 舵 机,如图 2-9 所示,该电机主要适用于那些角度需要不断变化并可以保持的控制 系统,其具有体积紧凑、便于安装、输出力矩大、稳定性好、控制简单,便于 和数字系统接口等优点,具体参数如表 2-1 所示
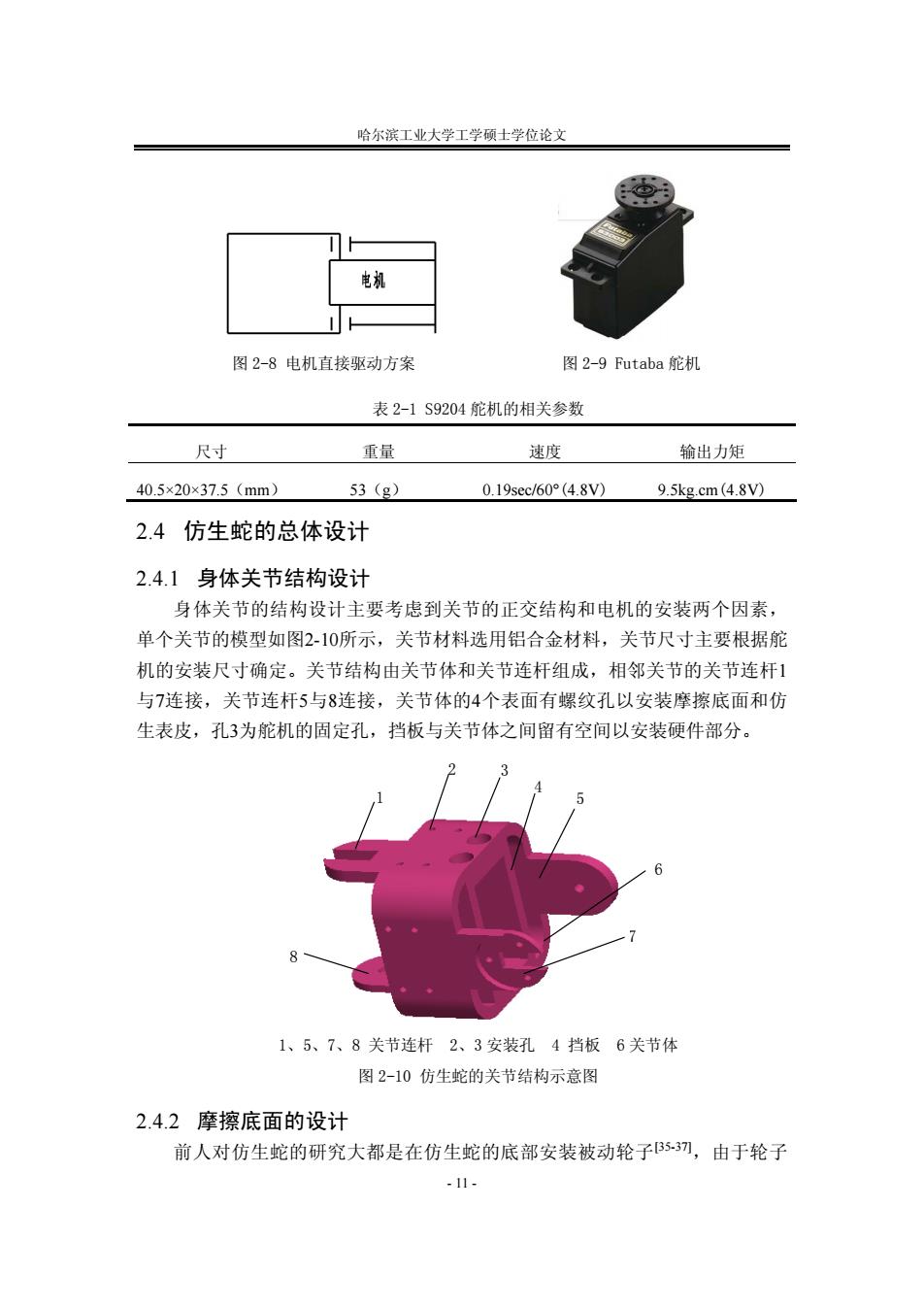
哈尔滨工业大学工学硕士学位论文 电机 图2-8电机直接驱动方案 图2-9 Futaba舵机 表2-1S9204舵机的相关参数 尺寸 重量 速度 输出力矩 40.5×20×37.5(mm) 53(g) 0.19sec/60°(4.8V) 9.5kg.cm(4.8V) 2.4仿生蛇的总体设计 2.4.1身体关节结构设计 身体关节的结构设计主要考虑到关节的正交结构和电机的安装两个因素, 单个关节的模型如图2-10所示,关节材料选用铝合金材料,关节尺寸主要根据舵 机的安装尺寸确定。关节结构由关节体和关节连杆组成,相邻关节的关节连杆1 与7连接,关节连杆5与8连接,关节体的4个表面有螺纹孔以安装摩擦底面和仿 生表皮,孔3为舵机的固定孔,挡板与关节体之间留有空间以安装硬件部分。 1、5、7、8关节连杆2、3安装孔4挡板6关节体 图2-10仿生蛇的关节结构示意图 2.4.2摩擦底面的设计 前人对仿生蛇的研究大都是在仿生蛇的底部安装被动轮子B53刃,由于轮子 -11-
哈尔滨工业大学工学硕士学位论文 图 2-8 电机直接驱动方案 图 2-9 Futaba 舵机 表 2-1 S9204 舵机的相关参数 尺寸 重量 速度 输出力矩 40.5×20×37.5(mm) 53(g) 0.19sec/60°(4.8V) 9.5kg.cm(4.8V) 2.4 仿生蛇的总体设 身体关节结构设计 考虑到关节的正交结构和电机的安装两个因素, 单个 2.4.2 摩擦底面的设计 前人对仿生蛇的研究大都是在仿生蛇的底部安装被动轮子[35-37],由于轮子 1 4 5 6 8 7 计 2.4.1 身体关节的结构设计主要 关节的模型如图2-10所示,关节材料选用铝合金材料,关节尺寸主要根据舵 机的安装尺寸确定。关节结构由关节体和关节连杆组成,相邻关节的关节连杆1 与7连接,关节连杆5与8连接,关节体的4个表面有螺纹孔以安装摩擦底面和仿 生表皮,孔3为舵机的固定孔,挡板与关节体之间留有空间以安装硬件部分。 2 3 1、5、7、8 关节连杆 2、3 安装孔 4 挡板 6 关节体 图 2-10 仿生蛇的关节结构示意图 - 11 -
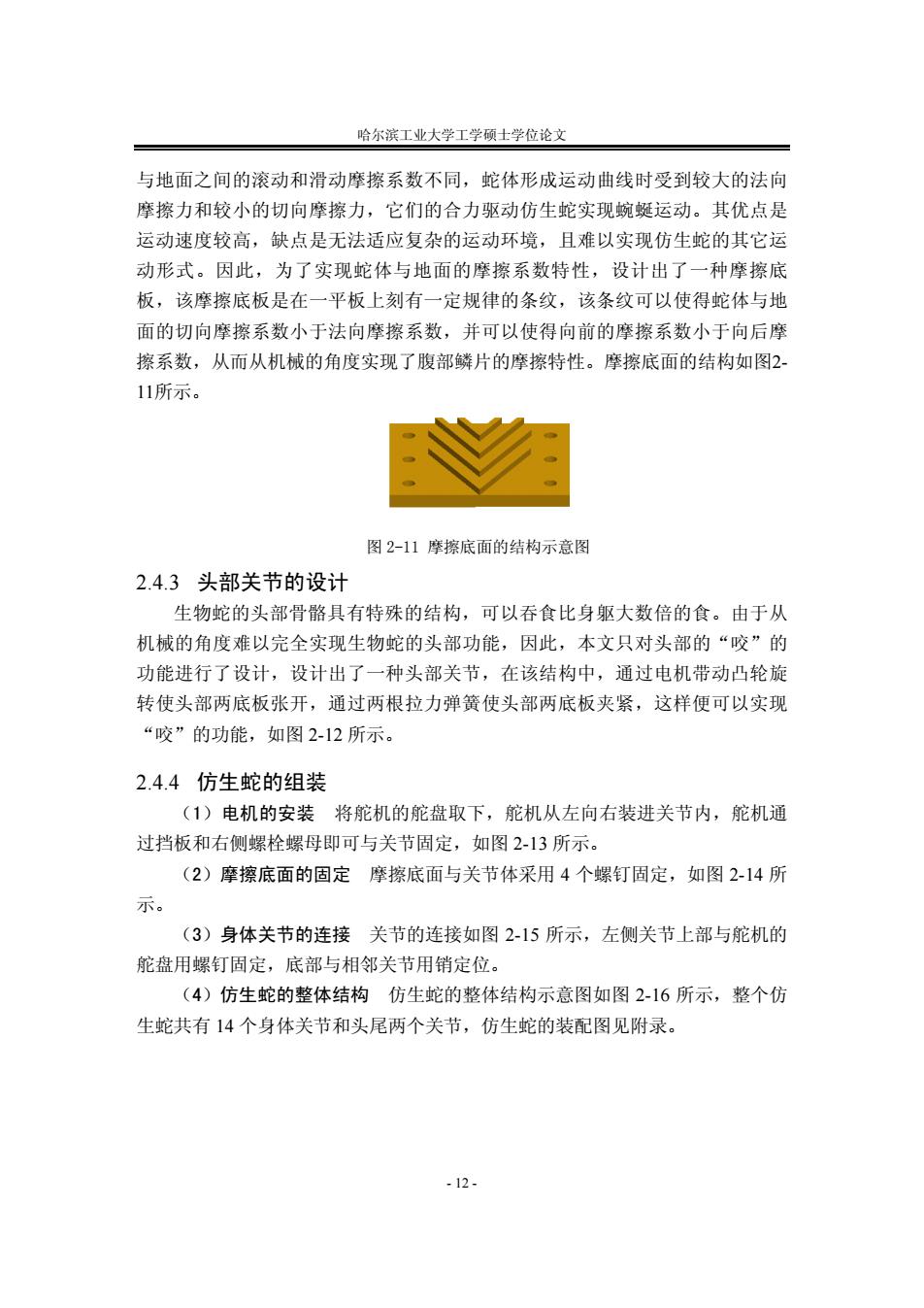
哈尔滨工业大学工学硕士学位论文 与地面之间的滚动和滑动摩擦系数不同,蛇体形成运动曲线时受到较大的法向 摩擦力和较小的切向摩擦力,它们的合力驱动仿生蛇实现蜿蜒运动。其优点是 运动速度较高,缺点是无法适应复杂的运动环境,且难以实现仿生蛇的其它运 动形式。因此,为了实现蛇体与地面的摩擦系数特性,设计出了一种摩擦底 板,该摩擦底板是在一平板上刻有一定规律的条纹,该条纹可以使得蛇体与地 面的切向摩擦系数小于法向摩擦系数,并可以使得向前的摩擦系数小于向后摩 擦系数,从而从机械的角度实现了腹部鳞片的摩擦特性。摩擦底面的结构如图2 11所示。 图2-11摩擦底面的结构示意图 2.4.3头部关节的设计 生物蛇的头部骨骼具有特殊的结构,可以吞食比身躯大数倍的食。由于从 机械的角度难以完全实现生物蛇的头部功能,因此,本文只对头部的“咬”的 功能进行了设计,设计出了一种头部关节,在该结构中,通过电机带动凸轮旋 转使头部两底板张开,通过两根拉力弹簧使头部两底板夹紧,这样便可以实现 “咬”的功能,如图2-12所示。 2.4.4仿生蛇的组装 (1)电机的安装将舵机的舵盘取下,舵机从左向右装进关节内,舵机通 过挡板和右侧螺栓螺母即可与关节固定,如图2-13所示。 (2)摩擦底面的固定摩擦底面与关节体采用4个螺钉固定,如图2-14所 示。 (3)身体关节的连接关节的连接如图2-15所示,左侧关节上部与舵机的 舵盘用螺钉固定,底部与相邻关节用销定位。 (4)仿生蛇的整体结构仿生蛇的整体结构示意图如图2-16所示,整个仿 生蛇共有14个身体关节和头尾两个关节,仿生蛇的装配图见附录。 -12-
哈尔滨工业大学工学硕士学位论文 - 12 - 擦系数不同,蛇体形成运动曲线时受到较大的法向 摩擦 与地面之间的滚动和滑动摩 力和较小的切向摩擦力,它们的合力驱动仿生蛇实现蜿蜒运动。其优点是 运动速度较高,缺点是无法适应复杂的运动环境,且难以实现仿生蛇的其它运 动形式。因此,为了实现蛇体与地面的摩擦系数特性,设计出了一种摩擦底 板,该摩擦底板是在一平板上刻有一定规律的条纹,该条纹可以使得蛇体与地 面的切向摩擦系数小于法向摩擦系数,并可以使得向前的摩擦系数小于向后摩 擦系数,从而从机械的角度实现了腹部鳞片的摩擦特性。摩擦底面的结构如图2- 11所示。 图 2-11 摩擦底面的结构示意图 2.4.3 头部关节的设计 生物蛇的头部骨骼具有 大数倍的食。由于从 物蛇的头部功能,因此,本文只对头部的“咬”的 功能 舵盘取下,舵机从左向右装进关节内,舵机通 可与关节固定,如图 2-13 所示。 螺钉固定,底部与相邻关节用销定位。 蛇的装配图见附录。 特殊的结构,可以吞食比身躯 机械的角度难以完全实现生 进行了设计,设计出了一种头部关节,在该结构中,通过电机带动凸轮旋 转使头部两底板张开,通过两根拉力弹簧使头部两底板夹紧,这样便可以实现 “咬”的功能,如图 2-12 所示。 2.4.4 仿生蛇的组装 (1)电机的安装 将舵机的 过挡板和右侧螺栓螺母即 (2)摩擦底面的固定 摩擦底面与关节体采用 4 个螺钉固定,如图 2-14 所 示。 (3)身体关节的连接 关节的连接如图 2-15 所示,左侧关节上部与舵机的 舵盘用 (4)仿生蛇的整体结构 仿生蛇的整体结构示意图如图 2-16 所示,整个仿 生蛇共有 14 个身体关节和头尾两个关节,仿生