第2卷第1期 智能系统学报 Vol.2 Ng 1 2007年2月 CAAI Transactions on Intelligent Systems Fcb.2007 模糊系统万能逼近理论研究综述 刘福才12陈超邵慧1,裴润 (1.燕山大学电气工程学院河北秦皇岛066004:2.哈尔滨工业大学航天学院,黑龙江哈尔滨150001) 摘要:模糊系统通用逼近理论是模糊理论研究的一个重要方向.目前,对模糊系统通用逼近性的研究己经取得了 很大的进展.对模糊系统的通用逼近性、模糊系统作为通用逼近器的充分条件和必要条件以及模糊系统的逼近精度 等方面的研究进行了较为详尽的综述,分析了各种分析方法的主要成果及其特点(包括优点和局限性),并指出了今 后模糊系统通用逼近理论研究中有待解决的许多问题. 关键词:模糊系统的通用逼近性;充分条件;必要条件;逼近精度 中图分类号:TP15文献标识码:A文章编号:1673-4785(2007)01-002510 Researches for universal a pproximation of fuzzy systems:a survey LIU Fucai'2,CHEN Chao',SHAO Hui',PEI Run2 (1.Department of Automation Engineering,Yanshan University,Qinhuangdao 066004,China;2.School of Astronautics, Harbin Institute of Technology,Harbin 150001,China) Abstract:The universal approximation of fuzzy systems is an important direction of fuzzy theory.At pres- ent,a lot of progress has been made in the research for the universal approximation of fuzzy systems.In this paper,a survey of the universal approximation of fuzzy systems,the sufficient and necessary condition for fuzzy systems as universal approximators,and approximation accuracy of fuzzy systems etc is made in details.The achievement and properties(including advantages and disadvantages)of each method are also analyzed,and then the problems of the universal approximation of fuzzy systems in future researches are pointed out further. Key words:universal approximation of fuzzy systems;sufficient conditions;necessary conditions;approxi- mation accuracy 自从20世纪60年代后期,由L.A.Zedeh所创 为函数逼近器的充分条件67,28.30是指对于任意 立模糊理论以来,模糊理论在许多领域得到了成功 给定的连续函数,每个输入变量要取多少个模糊子 的应用在许多应用中,主要的设计目标是根据给定 集才能够保证所需要的逼近精度.而模糊系统作为 的逼近精度建立一个模糊系统,逼近一个预定的模 通用逼近器的必要条件31,]可以用来确定所选择 型或控制过程刀,这就是所谓的逼近问题81).在 模糊系统的组成元素,包括模糊系统的输入模糊子 实际应用中,当设计一个模糊系统时,了解模糊系统 集、输出模糊子集和模糊规则,以及这些组成元素的 逼近预定的控制或决策的逼近机制是很重要 限制条件等.而逼近精度5.刀用来确定模糊系统的 的18.2).因此,模糊系统的通用逼近性研究成为20 误差上界,从而确定一个模糊系统的好坏程度 世纪90年代以来模糊理论研究的重要方向,同时也 模糊系统的理论研究和实际应用都是建立在模 是模糊理论的一个重要支柱23.刃.所谓模糊系统的 糊系统通用逼近性的基础之上的.这是因为从数学 通用逼近性是指模糊系统能否以任意精度逼近紧致 的角度来看,模糊系统是从输入论域到输出论域的 集(封闭,有界)上的任意连续函数;所谓模糊系统作 一个函数映射.当模糊系统用作系统建模和辨识时, 通用逼近性决定了它是否能够逼近任意连续的非线 收稿日期:200607-28. 基金项目:燕山大学博士基金资助项目(B111) 性动态模型,当模糊系统用作控制时,通用逼近性决 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
第 2 卷第 1 期 智 能 系 统 学 报 Vol. 2 №. 1 2007 年 2 月 CAA I Transactions on Intelligent Systems Feb. 2007 模糊系统万能逼近理论研究综述 刘福才1 ,2 ,陈 超1 ,邵 慧1 ,裴 润2 (1. 燕山大学 电气工程学院 ,河北 秦皇岛 066004 ;2. 哈尔滨工业大学 航天学院 ,黑龙江 哈尔滨 150001) 摘 要 :模糊系统通用逼近理论是模糊理论研究的一个重要方向. 目前 ,对模糊系统通用逼近性的研究已经取得了 很大的进展. 对模糊系统的通用逼近性、模糊系统作为通用逼近器的充分条件和必要条件以及模糊系统的逼近精度 等方面的研究进行了较为详尽的综述 ,分析了各种分析方法的主要成果及其特点(包括优点和局限性) ,并指出了今 后模糊系统通用逼近理论研究中有待解决的许多问题. 关键词 :模糊系统的通用逼近性 ;充分条件 ;必要条件 ;逼近精度 中图分类号 : TP15 文献标识码 :A 文章编号 :167324785 (2007) 0120025210 Researches for universal approximation of fuzzy systems : a survey L IU Fu2cai 1 ,2 ,CH EN Chao 1 ,SHAO Hui 1 ,PEI Run 2 (1. Department of Automation Engineering , Yanshan University , Qinhuangdao 066004 , China ; 2. School of Astronautics , Harbin Institute of Technology , Harbin 150001 , China) Abstract :The universal approximation of f uzzy systems is an important direction of f uzzy theory. At pres2 ent , a lot of progress has been made in t he research for t he universal approximation of f uzzy systems. In t his paper , a survey of the universal approximation of f uzzy systems , the sufficient and necessary condition for f uzzy systems as universal app roximators , and approximation accuracy of f uzzy systems etc is made in details. The achievement and properties (including advantages and disadvantages) of each met hod are also analyzed , and then the problems of t he universal app roximation of f uzzy systems in f ut ure researches are pointed out f urt her. Keywords :universal approximation of f uzzy systems; sufficient conditions; necessary conditions; approxi2 mation accuracy 收稿日期 :2006207228. 基金项目 :燕山大学博士基金资助项目(B111) . 自从 20 世纪 60 年代后期 ,由 L. A. Zedeh 所创 立模糊理论以来 ,模糊理论在许多领域得到了成功 的应用. 在许多应用中 ,主要的设计目标是根据给定 的逼近精度建立一个模糊系统 ,逼近一个预定的模 型或控制过程[1 - 7 ] ,这就是所谓的逼近问题[8 - 17 ] . 在 实际应用中 ,当设计一个模糊系统时 ,了解模糊系统 逼近 预 定 的 控 制 或 决 策 的 逼 近 机 制 是 很 重 要 的[18 - 22 ] . 因此 ,模糊系统的通用逼近性研究成为 20 世纪 90 年代以来模糊理论研究的重要方向 ,同时也 是模糊理论的一个重要支柱[ 23 - 27 ] . 所谓模糊系统的 通用逼近性是指模糊系统能否以任意精度逼近紧致 集(封闭 ,有界) 上的任意连续函数 ;所谓模糊系统作 为函数逼近器的充分条件[16 - 17 ,28 - 30 ] 是指对于任意 给定的连续函数 ,每个输入变量要取多少个模糊子 集才能够保证所需要的逼近精度. 而模糊系统作为 通用逼近器的必要条件[ 31 - 34 ] 可以用来确定所选择 模糊系统的组成元素 ,包括模糊系统的输入模糊子 集、输出模糊子集和模糊规则 ,以及这些组成元素的 限制条件等. 而逼近精度[ 35 - 37 ]用来确定模糊系统的 误差上界 ,从而确定一个模糊系统的好坏程度. 模糊系统的理论研究和实际应用都是建立在模 糊系统通用逼近性的基础之上的. 这是因为从数学 的角度来看 ,模糊系统是从输入论域到输出论域的 一个函数映射. 当模糊系统用作系统建模和辨识时 , 通用逼近性决定了它是否能够逼近任意连续的非线 性动态模型 ;当模糊系统用作控制时 ,通用逼近性决
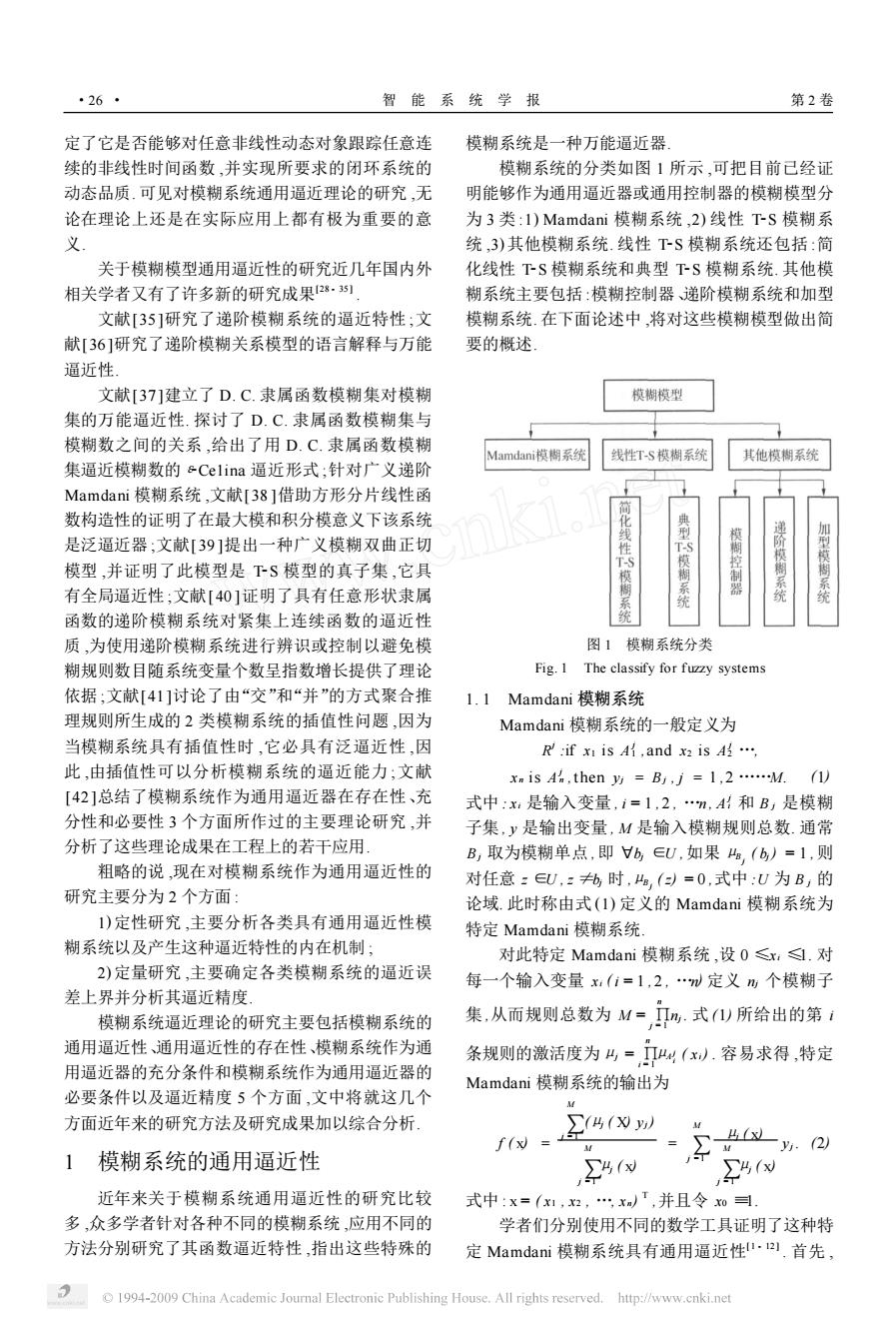
·26 智能系统学报 第2卷 定了它是否能够对任意非线性动态对象跟踪任意连 模糊系统是一种万能逼近器 续的非线性时间函数,并实现所要求的闭环系统的 模糊系统的分类如图1所示,可把目前已经证 动态品质.可见对模糊系统通用逼近理论的研究,无 明能够作为通用逼近器或通用控制器的模糊模型分 论在理论上还是在实际应用上都有极为重要的意 为3类:l)Mamdani模糊系统,2)线性T-S模糊系 义 统,3)其他模糊系统.线性TS模糊系统还包括:简 关于模糊模型通用逼近性的研究近几年国内外 化线性T下S模糊系统和典型TS模糊系统.其他模 相关学者又有了许多新的研究成果28.35) 糊系统主要包括:模糊控制器递阶模糊系统和加型 文献[35]研究了递阶模糊系统的逼近特性;文 模糊系统.在下面论述中,将对这些模糊模型做出简 献[36]研究了递阶模糊关系模型的语言解释与万能 要的概述 逼近性 文献[37]建立了D.C.隶属函数模糊集对模糊 模糊模型 集的万能逼近性.探讨了D.C.隶属函数模糊集与 模糊数之间的关系,给出了用D.C.隶属函数模糊 Mamdani模糊系统 线性T-S模糊系统 其他模糊系统 集逼近模糊数的&Celina逼近形式:针对广义递阶 Mamdani模糊系统,文献[38]借助方形分片线性函 数构造性的证明了在最大模和积分模意义下该系统 线性 型 是泛逼近器;文献[39]提出一种广义模糊双曲正切 T 模型,并证明了此模型是TS模型的真子集,它具 有全局逼近性,文献[40]证明了具有任意形状隶属 5模糊天 模糊系统 模控制器 阶模 加型模系统 函数的递阶模糊系统对紧集上连续函数的逼近性 统 质,为使用递阶模糊系统进行辨识或控制以避免模 图1模糊系统分类 糊规则数目随系统变量个数呈指数增长提供了理论 Fig.I The classify for fuzzy systems 依据;文献[41]讨论了由“交”和“并”的方式聚合推 1.1 Mamdani模糊系统 理规则所生成的2类模糊系统的插值性问题,因为 Mamdani模糊系统的一般定义为 当模糊系统具有插值性时,它必具有泛逼近性,因 R':if x is A ,and x2 isA 此,由插值性可以分析模糊系统的逼近能力;文献 x is Ah,then yy B3,j 1,2.....M.(1) [42]总结了模糊系统作为通用逼近器在存在性、充 式中:x是输入变量,i=1,2,n,A}和B,是模糊 分性和必要性3个方面所作过的主要理论研究,并 子集,y是输出变量,M是输入模糊规则总数.通常 分析了这些理论成果在工程上的若干应用」 B,取为模糊单点,即b∈U,如果a,(6)=1,则 粗略的说,现在对模糊系统作为通用逼近性的 对任意:∈U,z,时,a,(=0,式中:U为B,的 研究主要分为2个方面: 论域.此时称由式(I)定义的Mamdani模糊系统为 1)定性研究,主要分析各类具有通用逼近性模 特定Mamdani模糊系统, 糊系统以及产生这种逼近特性的内在机制; 对此特定Mamdani模糊系统,设0≤x,.对 2)定量研究,主要确定各类模糊系统的逼近误 每一个输入变量x(i=1,2,定义m个模糊子 差上界并分析其逼近精度, 模糊系统逼近理论的研究主要包括模糊系统的 集,从而规则总数为M=%.式)所给出的第1 通用逼近性、通用逼近性的存在性、模糊系统作为通 条规则的激活度为凸=叫(x).容易求得,特定 用逼近器的充分条件和模糊系统作为通用逼近器的 Mamdani模糊系统的输出为 必要条件以及逼近精度5个方面,文中将就这几个 M 方面近年来的研究方法及研究成果加以综合分析. f(x Γy.2 1模糊系统的通用逼近性 4( 4(x 近年来关于模糊系统通用逼近性的研究比较 式中:x=(x1,2,XaT,并且令0曰」 多,众多学者针对各种不同的模糊系统,应用不同的 学者们分别使用不同的数学工具证明了这种特 方法分别研究了其函数逼近特性,指出这些特殊的 定Mamdani模糊系统具有通用逼近性,).首先, 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
定了它是否能够对任意非线性动态对象跟踪任意连 续的非线性时间函数 ,并实现所要求的闭环系统的 动态品质. 可见对模糊系统通用逼近理论的研究 ,无 论在理论上还是在实际应用上都有极为重要的意 义. 关于模糊模型通用逼近性的研究近几年国内外 相关学者又有了许多新的研究成果[28 - 35 ] . 文献[35 ]研究了递阶模糊系统的逼近特性 ;文 献[ 36 ]研究了递阶模糊关系模型的语言解释与万能 逼近性. 文献[37 ]建立了 D. C. 隶属函数模糊集对模糊 集的万能逼近性. 探讨了 D. C. 隶属函数模糊集与 模糊数之间的关系 ,给出了用 D. C. 隶属函数模糊 集逼近模糊数的ε2Ce1ina 逼近形式 ;针对广义递阶 Mamdani 模糊系统 ,文献[ 38 ]借助方形分片线性函 数构造性的证明了在最大模和积分模意义下该系统 是泛逼近器 ;文献[ 39 ]提出一种广义模糊双曲正切 模型 ,并证明了此模型是 T2S 模型的真子集 ,它具 有全局逼近性 ;文献[ 40 ]证明了具有任意形状隶属 函数的递阶模糊系统对紧集上连续函数的逼近性 质 ,为使用递阶模糊系统进行辨识或控制以避免模 糊规则数目随系统变量个数呈指数增长提供了理论 依据 ;文献[ 41 ]讨论了由“交”和“并”的方式聚合推 理规则所生成的 2 类模糊系统的插值性问题 ,因为 当模糊系统具有插值性时 ,它必具有泛逼近性 ,因 此 ,由插值性可以分析模糊系统的逼近能力 ;文献 [42 ]总结了模糊系统作为通用逼近器在存在性、充 分性和必要性 3 个方面所作过的主要理论研究 ,并 分析了这些理论成果在工程上的若干应用. 粗略的说 ,现在对模糊系统作为通用逼近性的 研究主要分为 2 个方面 : 1) 定性研究 ,主要分析各类具有通用逼近性模 糊系统以及产生这种逼近特性的内在机制 ; 2) 定量研究 ,主要确定各类模糊系统的逼近误 差上界并分析其逼近精度. 模糊系统逼近理论的研究主要包括模糊系统的 通用逼近性、通用逼近性的存在性、模糊系统作为通 用逼近器的充分条件和模糊系统作为通用逼近器的 必要条件以及逼近精度 5 个方面 ,文中将就这几个 方面近年来的研究方法及研究成果加以综合分析. 1 模糊系统的通用逼近性 近年来关于模糊系统通用逼近性的研究比较 多 ,众多学者针对各种不同的模糊系统 ,应用不同的 方法分别研究了其函数逼近特性 ,指出这些特殊的 模糊系统是一种万能逼近器. 模糊系统的分类如图 1 所示 ,可把目前已经证 明能够作为通用逼近器或通用控制器的模糊模型分 为 3 类 :1) Mamdani 模糊系统 ,2) 线性 T2S 模糊系 统 ,3) 其他模糊系统. 线性 T2S 模糊系统还包括 :简 化线性 T2S 模糊系统和典型 T2S 模糊系统. 其他模 糊系统主要包括 :模糊控制器、递阶模糊系统和加型 模糊系统. 在下面论述中 ,将对这些模糊模型做出简 要的概述. 图 1 模糊系统分类 Fig. 1 The classify for fuzzy systems 1. 1 Mamdani 模糊系统 Mamdani 模糊系统的一般定义为 R j :if x1 is A j 1 ,and x2 is A j 2 …, x n is A j n ,t hen yj = B j , j = 1 ,2 ……M. (1) 式中 : xi 是输入变量 , i = 1 , 2 , …n , A j i 和 B j 是模糊 子集 , y 是输出变量 , M 是输入模糊规则总数. 通常 B j 取为模糊单点 ,即 Πbj ∈U ,如果μB j ( bj ) = 1 ,则 对任意 z ∈U , z ≠bj 时 ,μB j ( z) = 0 ,式中 :U 为 B j 的 论域. 此时称由式 (1) 定义的 Mamdani 模糊系统为 特定 Mamdani 模糊系统. 对此特定 Mamdani 模糊系统 ,设 0 ≤xi ≤1. 对 每一个输入变量 xi ( i = 1 , 2 , …n) 定义 nj 个模糊子 集 ,从而规则总数为 M = ∏ n j = 1 nj . 式 (1) 所给出的第 i 条规则的激活度为μj = ∏ n i = 1 μA j i ( xi) . 容易求得 ,特定 Mamdani 模糊系统的输出为 f ( x) = ∑ M j =1 (μj ( X) y j) ∑ M j = 1 μj ( x) = ∑ M j =1 μj ( x) ∑ M j =1 μj ( x) yj . (2) 式中 : x = ( x1 , x2 , …, x n ) T ,并且令 x0 ≡1. 学者们分别使用不同的数学工具证明了这种特 定 Mamdani 模糊系统具有通用逼近性[1 - 12 ] . 首先 , ·26 · 智 能 系 统 学 报 第 2 卷
第1期 刘福才,等:模糊系统万能逼近理论研究综述 ·27· 王立新川用Stone-Weierstrass定理证明了采用乘 【10]中指出:模糊控制其本质上是插值器.该结论是 积推理、中心去模糊、高斯隶属函数的Mamdani模 按“真值流动”的思想提出的.基于此,在文献[11] 糊系统能够以任意精度逼近紧致集上的任意连续实 中,提出了模糊系统的插值机理,对于模糊系统的函 函数.但由于证明过程使用了复杂的Stone 数逼近性提出了新的方法.受此启发,张恩勤)研 Weirstrass定理,这使得证明潜在的逼近机制并不 究了基于三角形隶属函数的一类模糊系统的插值特 清晰,并且对于一般的模糊系统是否成立也没能给 性,从模糊系统的结构分析上给出了一类模糊系统 出确切的答案.因此,在文献[2]中,王立新又提出了 与分段插值函数的等价性证明,并给出了相应的逼 模糊基函数(FBF)的概念.模糊基函数最大的优点 近误差估计. 是来自人类专家的模糊语言IF-THEN规则直接与 以上分析较为概括的阐述了目前证明Mamda- 模糊基函数相关。 模糊系统具有通用逼近性的方法.可以看出,对 既然模糊基函数在研究模糊系统的通用逼近性 于Mamdani模糊系统作为通用逼近器的研究方法 方面起了重要的作用,那么,模糊基函数又有哪些特 很多,并且每种方法都各有其优点和局限性,而且越 点呢?曾小军在文献[3-4]给出了较详细的分析, 来越完善.可以把这些方法存在的主要问题概括为: 并得出了模糊基函数的5种性质以及Mamdani模 I)每种方法所证明的Mamdani模糊系统都有 糊系统的一些基本特性.模糊基函数的5种性质为: 一定的限制条件(如推理机制、去模糊法、隶属函数 Structure Similarity;Compatibility;Complementar- 等) ity;Less Fuzzility;Composition of Fuzzy System; 2)没有给出模糊系统具有通用逼近性的内在本 Mamdani模糊系统的基本特性为:基本逼近特性; 质」 一致逼近特性;一致收敛特性;通用逼近特性 1.2下S模糊系统 王立新和曾小军的研究一方面为模糊系统的设 Mamdani模糊系统采用模糊集作为规则后件, 计指明了方向,另一方面也有其局限性.因为它们所 而TS模糊系统采用输入变量的线性或非线性函 证明的Mamdani模糊系统是“特定结构”的通用逼 数作为规则后件。 近器,即是采用乘法机制、中心去模糊、高斯隶属函 TS模糊系统的规则表示为 数或者具有紧支撑的隶属函数3的模糊系 Ry:IF xI is Af and x2 is A 统.分析至此,便可以提出2个问题: and…and xisA (3) 1)使用其他隶属函数、模糊逻辑、推理机制及去 乃=f1(x1,x2,x,j=1,2,,M 模糊法的Mamdani模糊系统是否具有通用逼近性? 式中:x(i=1,2,为输入变量,A}为模糊子 2)使模糊系统成为通用逼近器的内在机制是什 集,M为规则总数,∫:()为线性或非线性函数.当 么? f:()为输入变量的线性函数时,此系统为线性下 应浩5,61采用了将输入空间无限细分的方法, S模糊系统.而线性下S模糊系统在应浩3,)、曾 利用Weierstrass研究了特定Mamdani模糊系统 珂5.16]的证明方法中又分为简化线性TS模糊系 (包括中心去模糊和最大去模糊)是通用逼近器,揭 统和典型下S模糊系统的数学模型 示了函数逼近的内在机制,并推导出了这种模糊系 为了区分二者的不同点,必须首先给出简化线 统作为通用逼近器的充分条件.曾珂则使用了台 性下S模糊系统和典型下S模糊系统 劳展开法,利用拉格朗日余项证明了特定Mamdani 1.2.1简化线性TS模糊系统 模糊系统是通用逼近器 在TS模糊系统中,为了减少设计的参数,应 为了回答“基于其他类型隶属函数的模糊系统 浩采用了简化了的线性TS模糊系统 是否可以作为函数逼近器”这个问题,毛志宏81讨 对于SISO系统,系统表述如下: 论了采用模糊基函数的伸缩及平移作为隶属函数的 Rj:IF x is An, 情形,证明在隶属函数可积、积分非零且几乎处处连 THEN y k (ax +b),j 1,2...M.(4) 续的条件下,Mamdani模糊系统是通用逼近器 对于MISO系统,系统表述如下: 上面所提及的文献中,均用不同的方法证明了 Ry:IF xI is Af and x2 is A Mamdani模糊系统具有通用逼近性,然而模糊系统 and and xm is A 为何具有通用逼近性?模糊系统的本质何在?这一 THEN y kj(ao xo ax++anx, 关键性问题仍未得到很好的解决.李洪兴在文献 j=1,2,M. (5) 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
王立新[1 ] 用 Stone2Weierstrass 定理证明了采用乘 积推理、中心去模糊、高斯隶属函数的 Mamdani 模 糊系统能够以任意精度逼近紧致集上的任意连续实 函数. 但 由 于 证 明 过 程 使 用 了 复 杂 的 Stone2 Weirstrass 定理 ,这使得证明潜在的逼近机制并不 清晰 ,并且对于一般的模糊系统是否成立也没能给 出确切的答案. 因此 ,在文献[ 2 ]中 ,王立新又提出了 模糊基函数(FBF) 的概念. 模糊基函数最大的优点 是来自人类专家的模糊语言 IF2TH EN 规则直接与 模糊基函数相关. 既然模糊基函数在研究模糊系统的通用逼近性 方面起了重要的作用 ,那么 ,模糊基函数又有哪些特 点呢 ? 曾小军在文献[ 3 - 4 ]给出了较详细的分析 , 并得出了模糊基函数的 5 种性质以及 Mamdani 模 糊系统的一些基本特性. 模糊基函数的 5 种性质为 : Structure Similarity ;Compatibility ;Complementar2 ity ;Less Fuzzility ; Composition of Fuzzy System ; Mamdani 模糊系统的基本特性为 :基本逼近特性 ; 一致逼近特性 ;一致收敛特性 ;通用逼近特性. 王立新和曾小军的研究一方面为模糊系统的设 计指明了方向 ,另一方面也有其局限性. 因为它们所 证明的 Mamdani 模糊系统是“特定结构”的通用逼 近器 ,即是采用乘法机制、中心去模糊、高斯隶属函 数[1 - 2 ]或者具有紧支撑的隶属函数[ 3 - 4 ] 的模糊系 统. 分析至此 ,便可以提出 2 个问题 : 1) 使用其他隶属函数、模糊逻辑、推理机制及去 模糊法的 Mamdani 模糊系统是否具有通用逼近性 ? 2) 使模糊系统成为通用逼近器的内在机制是什 么 ? 应浩[5 - 6 ]采用了将输入空间无限细分的方法 , 利用 Weierstrass 研究了特定 Mamdani 模糊系统 (包括中心去模糊和最大去模糊) 是通用逼近器 ,揭 示了函数逼近的内在机制 ,并推导出了这种模糊系 统作为通用逼近器的充分条件. 曾珂[7 ] 则使用了台 劳展开法 ,利用拉格朗日余项证明了特定 Mamdani 模糊系统是通用逼近器. 为了回答“基于其他类型隶属函数的模糊系统 是否可以作为函数逼近器”这个问题 ,毛志宏[8 - 9 ] 讨 论了采用模糊基函数的伸缩及平移作为隶属函数的 情形 ,证明在隶属函数可积、积分非零且几乎处处连 续的条件下 ,Mamdani 模糊系统是通用逼近器. 上面所提及的文献中 ,均用不同的方法证明了 Mamdani 模糊系统具有通用逼近性 ,然而模糊系统 为何具有通用逼近性 ? 模糊系统的本质何在 ? 这一 关键性问题仍未得到很好的解决. 李洪兴在文献 [10 ]中指出 :模糊控制其本质上是插值器. 该结论是 按“真值流动”的思想提出的. 基于此 ,在文献[ 11 ] 中 ,提出了模糊系统的插值机理 ,对于模糊系统的函 数逼近性提出了新的方法. 受此启发 ,张恩勤[12 ] 研 究了基于三角形隶属函数的一类模糊系统的插值特 性 ,从模糊系统的结构分析上给出了一类模糊系统 与分段插值函数的等价性证明 ,并给出了相应的逼 近误差估计. 以上分析较为概括的阐述了目前证明 Mamda2 ni 模糊系统具有通用逼近性的方法. 可以看出 ,对 于 Mamdani 模糊系统作为通用逼近器的研究方法 很多 ,并且每种方法都各有其优点和局限性 ,而且越 来越完善. 可以把这些方法存在的主要问题概括为 : 1) 每种方法所证明的 Mamdani 模糊系统都有 一定的限制条件(如推理机制、去模糊法、隶属函数 等) . 2) 没有给出模糊系统具有通用逼近性的内在本 质. 1. 2 T2S 模糊系统 Mamdani 模糊系统采用模糊集作为规则后件 , 而 T2S 模糊系统采用输入变量的线性或非线性函 数作为规则后件. T2S 模糊系统的规则表示为 Rj :IF x1 is A j 1 and x2 is A j 2 and …and x n isA j n , (3) yj = f j ( x1 , x2 , …, x n ) , j = 1 ,2 , …, M. 式中 : xi ( i = 1 , 2 , …, n) 为输入变量 , A j i 为模糊子 集 , M 为规则总数 , f i ( ·) 为线性或非线性函数. 当 f i ( ·) 为输入变量的线性函数时 ,此系统为线性 T2 S 模糊系统. 而线性 T2S 模糊系统在应浩[13 - 14 ] 、曾 珂[15 - 16 ]的证明方法中又分为简化线性 T2S 模糊系 统和典型 T2S 模糊系统的数学模型. 为了区分二者的不同点 ,必须首先给出简化线 性 T2S 模糊系统和典型 T2S 模糊系统. 1. 2. 1 简化线性 T2S 模糊系统 在 T2S 模糊系统中 ,为了减少设计的参数 ,应 浩采用了简化了的线性 T2S 模糊系统. 对于 SISO 系统 ,系统表述如下 : Rj :IF x is A pj , T HEN y = kj ( ax + b) , j = 1 ,2 , …, M. (4) 对于 MISO 系统 ,系统表述如下 : Rj :IF x1 is A j 1 and x2 is A j 2 and …and x n is A j n , TH EN y = kj ( a0 x0 + a1 x1 + …+ an x n ) , j = 1 ,2 , …, M. (5) 第 1 期 刘福才 ,等 :模糊系统万能逼近理论研究综述 ·27 ·
·28 智能系统学报 第2卷 式中:a,b,m,m,,aa,k(j=1,2,M0,为要设 模糊系统和PDC控制器,并讨论了它们的基本性 计的参数.而每个规则中,a,b,m,m,an都是定 能,得到了2个结果: 值,要变动的只有kj=1,2,0.这样要设计的 1)线性TS模糊系统是光滑非线性动态系统 参数总共只有M+n+2个,几乎减少了一半.这样, 的通用逼近器; 得到的简化线性下$模糊系统的输出为 2)PDC控制器是非线性状态反馈控制器的通 M 用逼近器。 马(xy) f(x= TS模糊系统作为通用逼近器的基本思想是: 6) 4田 采用局部线性化实现全局非线性逼近.目前,对下S 模糊系统的研究并不多,并且主要集中在对线性下 对于这种简化的线性TS模糊系统,应浩从数 S模糊系统通用逼近性的研究上,应浩、曾珂、陈卫 学上推导出了简化了的SISO)与MISO]线性下 田所提出的方法虽然各不相同,但它们之间有一定 S模糊系统为通用逼近器,并给出了相应的充分条 的相关性,这从线性TS模糊系统作为通用逼近器 件.但是由于简化线性TS模糊系统的限制条件较 的充分条件的比较中可以看出.他们的方法有共同 多,虽然所需求解的规则后件的参数较少,但实际应 的优点:所证明的线性TS模糊系统对隶属函数类 用中仍有一定的局限性.为此,应浩又用类似的方法 型、模糊逻辑控制以及去模糊方法没有任何限制.但 证明了一般线性TS模糊系统的通用逼近性,,曾 与此同时,3种方法证明过程中的限制条件也提出 珂则证明了典型TS模糊系统的通用逼近性51. 了下S模糊系统研究中待解决的问题:线性TS模 1.2.2典型TS模糊系统 糊系统可以实现全局非线性逼近,那么非线性T下S 典型下S模糊系统的一般定义为 模糊系统是否也可以作为非线性逼近器? R,:IF xI is Af and x is A2 and and 1.3其他模糊系统的逼近性问题 xmis A THEN 随着模糊逼近理论的不断发展,研究各种类型 y pno pixi ppx2++pixa= 的通用逼近器逐渐成为研究的热点.目前,除了 po >pnx..j=1,2.M. 7) Mamdani模糊系统和下S模糊系统,所研究的其他 式中:x:(i=1,2,m)为输入变量,A{为模糊子 主要模糊系统包括:1)模糊控制器,2)递阶模糊系 集,M为规则总数,Pmi=1,2,W为模糊系统的 统,3)加型模糊系统 参数.对典型TS模糊系统,设0≤x,.对每一个 1.3.1模糊控制器 输入变量x(i=1,2,W定义m个模糊子集,从而 近些年来,对于模糊控制器的研究不断增多,模 糊控制是一种基于规则的控制,它直接采用语言型 规则总数为M=.式)所给出的第i条规则的 控制规则,其依据是现场操作员的控制经验或相关 激活度为马=山(x).容易求得典型下S模糊系 专家的知识,在设计中不需要建立被控对象的精确 数学模型,因而使得控制机理和策略易于接受和理 统的输出为 解,设计简单,便于使用 在文献[19]中,Buckley将基本模糊控制器分 f(x) (8】 为3类:l)expert systems;2)approximation reason- 2%w ing(fuzzy logic);3)Sugeno controller. 式中:x=(x1,x2,x)T,并且令x0写 通用控制器研究方向的第一个结果是:如果一 对于这种典型TS模糊系统,曾珂证明,在 个过程可由一个连续控制器(不一定是模糊控制器) 采用广义全交叠输入隶属函数的前提下,该系统具 控制,那么这个过程也可由多元素同时运行的模糊 有通用逼近性,并得到了其作为通用逼近器的充分 控制器所控制 条件161 在文献[20]中,Buckley证明了基于Sugeno型 而陈卫田小则利用终值定理,对带有非模糊规 模糊控制器是通用模糊控制器,在Buckley!1,引中 则后件的模糊逻辑控制(FLC)系统进行分析,证明 又证明了基于系列的模糊控制器是通用逼近器。 了该系统具有通用逼近性,并得到了其作为通用逼 但是,在证明系列的模糊控制器是通用逼近器的 近器的充分条件1)。 过程中遇到了2个问题: 在文献[l8]中,Huao.Wang提到了线性TS l)6=FC(e,△e不是(e,△e的连续函数; 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
式中 : a , b, a0 , a1 , …, an , kj ( j = 1 , 2 , …, M) ,为要设 计的参数. 而每个规则中 , a , b, a0 , a1 , …, an 都是定 值 ,要变动的只有 kj ( j = 1 ,2 , …, M) . 这样要设计的 参数总共只有 M + n + 2 个 ,几乎减少了一半. 这样 , 得到的简化线性 T2S 模糊系统的输出为 f ( x) = ∑ M j = 1 (μj ( x) y j) ∑ M j = 1 μj ( x) . (6) 对于这种简化的线性 T2S 模糊系统 ,应浩从数 学上推导出了简化了的 SISO [13 ]与 MISO [13 ]线性 T2 S 模糊系统为通用逼近器 ,并给出了相应的充分条 件. 但是由于简化线性 T2S 模糊系统的限制条件较 多 ,虽然所需求解的规则后件的参数较少 ,但实际应 用中仍有一定的局限性. 为此 ,应浩又用类似的方法 证明了一般线性 T2S 模糊系统的通用逼近性[14 ] ,曾 珂则证明了典型 T2S 模糊系统的通用逼近性[15 ] . 1. 2. 2 典型 T2S 模糊系统 典型 T2S 模糊系统的一般定义为 Rj :IF x1 is A j 1 and x2 is A j 2 and …and x n is A j n T HEN , y = pj0 + pj1 x1 + pj2 x2 + …+ pjn x n = pj0 + ∑ n i = 1 pji x i , j = 1 ,2 , …, M. (7) 式中 : xi ( i = 1 , 2 , …, n) 为输入变量 , A j i 为模糊子 集 , M 为规则总数 , pji ( i = 1 , 2 , …, n) 为模糊系统的 参数. 对典型 T2S 模糊系统 ,设 0 ≤xi ≤1. 对每一个 输入变量 xi ( i = 1 ,2 , …n) 定义 ni 个模糊子集 ,从而 规则总数为 M = ∏ n i = 1 ni . 式(7) 所给出的第 i 条规则的 激活度为μj = ∏ n i = 1 μA j i ( xi) . 容易求得典型 T2S 模糊系 统的输出为 f ( x) = ∑ M j =1 μj ( x) ∑ n i = 0 pji x i ∑ M j = 1 μj ( x) . (8) 式中 : x = ( x1 , x2 , …, x n ) T ,并且令 x0 ≡1. 对于这种典型 T2S 模糊系统 ,曾珂[15 ] 证明 ,在 采用广义全交叠输入隶属函数的前提下 ,该系统具 有通用逼近性 ,并得到了其作为通用逼近器的充分 条件[ 16 ] . 而陈卫田[17 ]则利用终值定理 ,对带有非模糊规 则后件的模糊逻辑控制 (FLC) 系统进行分析 ,证明 了该系统具有通用逼近性 ,并得到了其作为通用逼 近器的充分条件[ 17 ] . 在文献[ 18 ]中 , Hua o. Wang 提到了线性 T2S 模糊系统和 PDC 控制器 ,并讨论了它们的基本性 能 ,得到了 2 个结果 : 1) 线性 T2S 模糊系统是光滑非线性动态系统 的通用逼近器 ; 2) PDC 控制器是非线性状态反馈控制器的通 用逼近器. T2S 模糊系统作为通用逼近器的基本思想是 : 采用局部线性化实现全局非线性逼近. 目前 ,对 T2S 模糊系统的研究并不多 ,并且主要集中在对线性 T2 S 模糊系统通用逼近性的研究上 ,应浩、曾珂、陈卫 田所提出的方法虽然各不相同 ,但它们之间有一定 的相关性 ,这从线性 T2S 模糊系统作为通用逼近器 的充分条件的比较中可以看出. 他们的方法有共同 的优点 :所证明的线性 T2S 模糊系统对隶属函数类 型、模糊逻辑控制以及去模糊方法没有任何限制. 但 与此同时 ,3 种方法证明过程中的限制条件也提出 了 T2S 模糊系统研究中待解决的问题 :线性 T2S 模 糊系统可以实现全局非线性逼近 ,那么非线性 T2S 模糊系统是否也可以作为非线性逼近器 ? 1. 3 其他模糊系统的逼近性问题 随着模糊逼近理论的不断发展 ,研究各种类型 的通用逼近器逐渐成为研究的热点. 目前 ,除了 Mamdani 模糊系统和 T2S 模糊系统 ,所研究的其他 主要模糊系统包括 :1) 模糊控制器 ,2) 递阶模糊系 统 ,3) 加型模糊系统. 1. 3. 1 模糊控制器 近些年来 ,对于模糊控制器的研究不断增多 ,模 糊控制是一种基于规则的控制 ,它直接采用语言型 控制规则 ,其依据是现场操作员的控制经验或相关 专家的知识 ,在设计中不需要建立被控对象的精确 数学模型 ,因而使得控制机理和策略易于接受和理 解 ,设计简单 ,便于使用. 在文献[ 19 ]中 ,Buckley 将基本模糊控制器分 为 3 类 :1) expert systems ;2) approximation reason2 ing (f uzzy logic) ;3) Sugeno controller. 通用控制器研究方向的第一个结果是 :如果一 个过程可由一个连续控制器(不一定是模糊控制器) 控制 ,那么这个过程也可由多元素同时运行的模糊 控制器所控制. 在文献[ 20 ]中 ,Buckley 证明了基于 Sugeno 型 模糊控制器是通用模糊控制器 ;在 Buckley [ 1 - 3 ] 中 , 又证明了基于ξ系列的模糊控制器是通用逼近器. 但是 ,在证明ξ系列的模糊控制器是通用逼近器的 过程中遇到了 2 个问题 : 1)δ= FC( e ,Δe) 不是( e ,Δe) 的连续函数; ·28 · 智 能 系 统 学 报 第 2 卷
第1期 刘福才,等:模糊系统万能逼近理论研究综述 ·29· 2)在多变量情况下不封闭,因此不能使用 通用逼近器,并且模糊规则数随着输入变量的增加 Stone-Weierstrass定理 而线性增加.后来,Campello2又进一步证明,一个 由于上面2个问题的存在,Buckley未能找到 参数较少的递阶模糊关系系统可以转化成一个等价 基于逼近原理(模糊逻辑)的通用模糊控制器,因此, 的非递阶模糊关系.这个等价模型可以用于提取模 寻找是否存在基于逼近原理的通用模糊控制器将成 糊规则,也可以用于减少所提取的规则 为一个深入研究的课题 从本质上讲,标准模糊系统的F部分需要包括 Castro2回答了一个基本的理论问题“为什么 整个论域,所以THEN部分要简单(可以是常数); 模糊系统对各种各样的实际问题具有如此优越的性 递阶模糊系统的F部分不包括整个论域,从而使 能?”,同时提出了模糊逻辑控制器(FLC)的概念,模 THEN部分变得复杂, 糊逻辑控制器包括2种类型:具有模糊规则后件的 从上面的分析可以看出,虽然递阶模糊系统的 模糊逻辑控制器和具有非模糊规则后件的模糊逻辑 模糊规则总数比相对应的标准模糊系统要少,即较 控制器.在文献中,他一方面说明了一种特殊类型的 好地解决了“规则爆炸”问题,但递阶模糊系统的每 模糊逻辑控制器是通用逼近器,这种类型的模糊逻 一条规则要比标准模糊系统复杂得多.因为它的 辑控制器满足:高斯隶属函数、乘法模糊推理、中心 THEN部分是输入变量的顺序多项式」 去模糊.另一方面,又证明了其他类型的模糊逻辑控 1.3.3加型模糊系统 制器也是通用逼近器,这些模糊逻辑控制器包括: 所谓加型模糊系统(SAM)),是指将模糊规则的 1)具有其他隶属函数的模糊系统(包括三角形 输出或结论部分子集加到输入之中,这样便得到一 隶属函数、梯形隶属函数等); 个输入-输出状态空间,它覆盖函数的图像并将交 2)以任意协范数为模型的模糊连接器; 叠的模糊补块平均化.加型模糊系统就是通过用输 3)只需满足较弱特性的模糊推理; 入-输出状态空间的模糊补块覆盖来逼近函数的. 4)只需满足较弱条件的去模糊方法, 每一条模糊规则定义了一个模糊补块,从而将状态 证明了诸多模糊逻辑控制器是通用逼近器之 空间的几何图形与实际内容联系起来 后,又出现了一个比较实际的问题:给出一个特定的 Kosko2s,21利用有限覆盖定理研究了加型模 控制问题之后,哪一种类型的模糊逻辑控制器更适 糊系统的函数逼近性.证明了一个加型模糊系统通 合呢?文献[21]没有解决,另外,文献[21]也没有给 过神经元或统计聚类算法逼近一个位置的模糊补 出最优模糊逻辑控制器的结构和大小. 块,并从训练数据中产生一个模糊系统.Kosko在文 但是,尽管在实际应用中,由于不知道最优控制 献[25]对模糊集互相重叠个数做了假设,在文献 器是怎样进行选择的,但上面的叙述却从理论上说 [26]中对这一假设进行了削弱 明了模糊控制可以作为通用控制工具.有了这些理 张恩勤2列采用了较为简单的方法证明了一类 论基础,Ngnyen!2]证明了模糊控制可用于许多实 基于规则的加型模糊系统的通用逼近特性,由于很 际控制系统中(如分布式系统).尽管如此,模糊控制 多环节的处理上更为自由,所研究的加型模糊系统 方法的选择还要由许多附加条件所决定,如控制结 更为广泛 果的光滑性、稳定性、灵敏性等 关于模糊系统在通用逼近性的存在性方面所取 1.3,2递阶模糊系统 得的研究成果可参见文献[42] 上面所讲述的模糊系统都是标准模糊系统,但 2 模糊系统作为通用逼近器的充分条 是限制典型模糊控制器广泛应用的一个重要问题是 “规则爆炸”问题,也就是模糊规则数随着模糊控制 件研究与分析 器输入变量数的增加而迅速增加.这就增加了模糊 2.1关于充分条件的研究 系统的复杂性.王立新2]提出了递阶模糊系统,从 由于充分条件决定了模糊系统逼近误差的上 而解决了“多维曲面”的问题.递阶模型的基本思想 界,对已得到的模糊系统一致逼近任意连续时函数 是把一个多维输入模糊系统转化成低维模糊系统的 的各种充分条件进行比较分析,判定哪一个充分条 集合.其中的低维模糊系统称为Takagi-Sugeno 件所确定的逼近误差上界更小,或者在什么情况下 Kang(TSK)模糊系统 更小,以及计算复杂程度等等,这些工作无疑在理论 在文献[23]中,王立新以三输入模糊系统为例 和应用上都有非常重要的意义 用Stone-Weierstrass定理证明了递阶模糊系统是 纵观国内所有关于模糊系统作为函数逼近器及 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net
2) 在多变量情况下ξ不封闭 ,因此不能使用 Stone2Weierstrass 定理. 由于上面 2 个问题的存在 ,Buckley 未能找到 基于逼近原理(模糊逻辑) 的通用模糊控制器 ,因此 , 寻找是否存在基于逼近原理的通用模糊控制器将成 为一个深入研究的课题. Castro [ 21 ]回答了一个基本的理论问题“为什么 模糊系统对各种各样的实际问题具有如此优越的性 能 ?”,同时提出了模糊逻辑控制器(FLC) 的概念 ,模 糊逻辑控制器包括 2 种类型 :具有模糊规则后件的 模糊逻辑控制器和具有非模糊规则后件的模糊逻辑 控制器. 在文献中 ,他一方面说明了一种特殊类型的 模糊逻辑控制器是通用逼近器 ,这种类型的模糊逻 辑控制器满足 :高斯隶属函数、乘法模糊推理、中心 去模糊. 另一方面 ,又证明了其他类型的模糊逻辑控 制器也是通用逼近器 ,这些模糊逻辑控制器包括 : 1) 具有其他隶属函数的模糊系统 (包括三角形 隶属函数、梯形隶属函数等) ; 2) 以任意协范数为模型的模糊连接器 ; 3) 只需满足较弱特性的模糊推理 ; 4) 只需满足较弱条件的去模糊方法. 证明了诸多模糊逻辑控制器是通用逼近器之 后 ,又出现了一个比较实际的问题 :给出一个特定的 控制问题之后 ,哪一种类型的模糊逻辑控制器更适 合呢 ? 文献[21 ]没有解决 ,另外 ,文献[ 21 ]也没有给 出最优模糊逻辑控制器的结构和大小. 但是 ,尽管在实际应用中 ,由于不知道最优控制 器是怎样进行选择的 ,但上面的叙述却从理论上说 明了模糊控制可以作为通用控制工具. 有了这些理 论基础 ,Ngnyen [22 ] 证明了模糊控制可用于许多实 际控制系统中(如分布式系统) . 尽管如此 ,模糊控制 方法的选择还要由许多附加条件所决定 ,如控制结 果的光滑性、稳定性、灵敏性等. 1. 3. 2 递阶模糊系统 上面所讲述的模糊系统都是标准模糊系统 ,但 是限制典型模糊控制器广泛应用的一个重要问题是 “规则爆炸”问题 ,也就是模糊规则数随着模糊控制 器输入变量数的增加而迅速增加. 这就增加了模糊 系统的复杂性. 王立新[23 ] 提出了递阶模糊系统 ,从 而解决了“多维曲面”的问题. 递阶模型的基本思想 是把一个多维输入模糊系统转化成低维模糊系统的 集合. 其中的低维模糊系统称为 Takagi2Sugeno2 Kang ( TSK) 模糊系统. 在文献[23 ]中 ,王立新以三输入模糊系统为例 用 Stone2Weierstrass 定理证明了递阶模糊系统是 通用逼近器 ,并且模糊规则数随着输入变量的增加 而线性增加. 后来 ,Campello [24 ] 又进一步证明 ,一个 参数较少的递阶模糊关系系统可以转化成一个等价 的非递阶模糊关系. 这个等价模型可以用于提取模 糊规则 ,也可以用于减少所提取的规则. 从本质上讲 ,标准模糊系统的 IF 部分需要包括 整个论域 ,所以 T HEN 部分要简单 (可以是常数) ; 递阶模糊系统的 IF 部分不包括整个论域 ,从而使 TH EN 部分变得复杂. 从上面的分析可以看出 ,虽然递阶模糊系统的 模糊规则总数比相对应的标准模糊系统要少 ,即较 好地解决了“规则爆炸”问题 ,但递阶模糊系统的每 一条规则要比标准模糊系统复杂得多 ,因为它的 TH EN 部分是输入变量的顺序多项式. 1. 3. 3 加型模糊系统 所谓加型模糊系统(SAM) ,是指将模糊规则的 输出或结论部分子集加到输入之中 ,这样便得到一 个输入 - 输出状态空间 ,它覆盖函数的图像并将交 叠的模糊补块平均化. 加型模糊系统就是通过用输 入 - 输出状态空间的模糊补块覆盖来逼近函数的. 每一条模糊规则定义了一个模糊补块 ,从而将状态 空间的几何图形与实际内容联系起来. Kosko [25 - 26 ]利用有限覆盖定理研究了加型模 糊系统的函数逼近性. 证明了一个加型模糊系统通 过神经元或统计聚类算法逼近一个位置的模糊补 块 ,并从训练数据中产生一个模糊系统. Kosko 在文 献[25 ]对模糊集互相重叠个数做了假设 ,在文献 [26 ]中对这一假设进行了削弱. 张恩勤[27 ]采用了较为简单的方法证明了一类 基于规则的加型模糊系统的通用逼近特性 ,由于很 多环节的处理上更为自由 ,所研究的加型模糊系统 更为广泛. 关于模糊系统在通用逼近性的存在性方面所取 得的研究成果可参见文献[42 ]. 2 模糊系统作为通用逼近器的充分条 件研究与分析 2. 1 关于充分条件的研究 由于充分条件决定了模糊系统逼近误差的上 界 ,对已得到的模糊系统一致逼近任意连续时函数 的各种充分条件进行比较分析 ,判定哪一个充分条 件所确定的逼近误差上界更小 ,或者在什么情况下 更小 ,以及计算复杂程度等等 ,这些工作无疑在理论 和应用上都有非常重要的意义. 纵观国内所有关于模糊系统作为函数逼近器及 第 1 期 刘福才 ,等 :模糊系统万能逼近理论研究综述 ·29 ·