(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN105509729A (43)申请公布日2016.04.20 (21)申请号201510785516.6 (22)申请日2015.11.16 (71)申请人中国航天时代电子公司 地址100094北京市海淀区丰滢东路1号 (72)发明人江济良马祥森胡琦杨东伟 余敏黄蜀玲 (74)专利代理机构北京金智普华知识产权代理 有限公司11401 代理人皋吉甫 (51)Int.CI. G01021/00(2006.01) G01C21/20(2006.01) G05D1/02(2006.01) 权利要求书3页说明书9页附图6页 (54)发明名称 ~种基于仿生触角的机器人自主导航方法 (57)摘要 一种基于仿生触角的机器人自主导航方法, 所述自主导航方法从仿生学的角度出发,提出“仿 生触角”模型来理解传感器信息,所述方法包括四 Sng 种行走行为方式、六种行为触发条件,所述行走方 式为:对准转向、直线前进、避开转向、弧线绕行, Dng 所述行为触发条件为:对准条件、偏航条件、相遇 Dnga 条件、避开条件、脱离条件、终点条件,依靠仿生触 角感知周围未知环境,实时激励触发相应的行走 行为,全过程仿生学设计,适用于机器人未知环境 Lng Hng 下定目标点自主导航任务,不仅能忽略障碍物边 缘形状的限制,而且对于复杂障碍物情形同样具 有良好的适应性。 62160990真
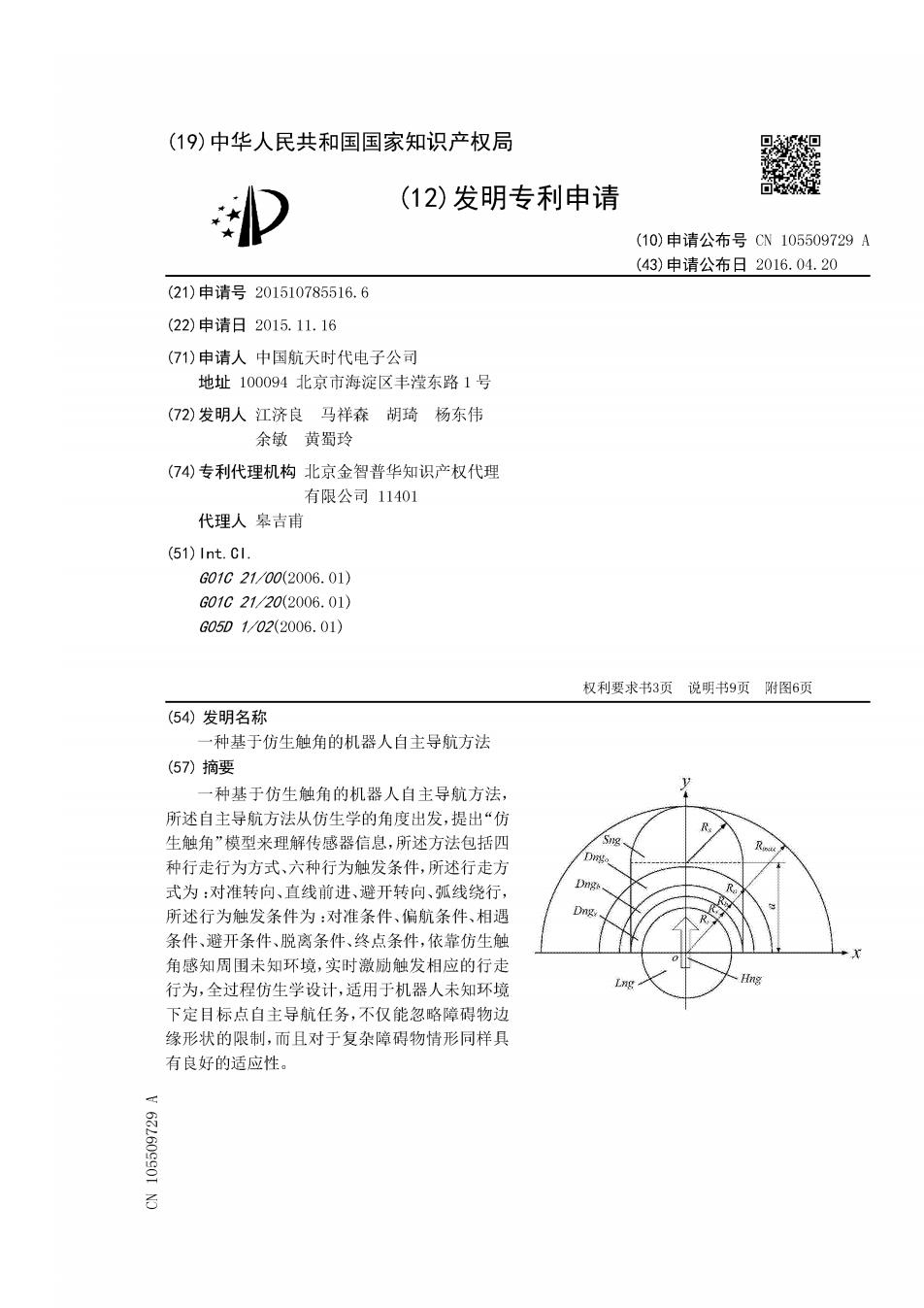
CN105509729A 权利要求书 1/3页 1.一种基于仿生触角的机器人自主导航方法,其特征在于,所述自主导航方法从仿生 学的角度出发,提出“仿生触角”模型来理解传感器信息,将机器人简化成半径为的圆,R 为机器人外接圆半径,并包括多个检测单元。 2.根据权利要求1所述的自主导航方法,其特征在于,所述检测单元分别为半圆环形触 角Dngs、Dngb和Dngo,半径分别为Rs、R和Ro,圆形触角Lng,箭头形触角Hng,以及位于正前方 位置由矩形(2Rs×a)加半圆形(半径Rs)组成的宽面积型触角Sng,Dngs、Dngb用于检测用于 探测激光雷达180°范围内最近的障碍物点:Dg用于检测位于相遇点时障碍物所处的方 位;Lng用于记录依靠自身定位系统实时得到的机器人位置:lg用于记录航向传感器实时 获得的机器人航向角:Sg用于检测当前传感器探测范围内无障碍直线行走的最大距离 Smax 所述方法包括四种行走行为方式、六种行为触发条件,所述行走方式为:对准转向、直 线前进、避开转向、弧线绕行,所述行为触发条件为:对准条件、偏航条件、相遇条件、避开条 件、脱离条件、终点条件: 所述方法步骤如下: 步骤1:从起点S向目标点T行进,对准转向行为触发,判断是否满足对准条件,若满足对 准条件,进行步骤2,不满足对准条件,继续执行对准转向行为: 步骤2:直线前行行为触发,判断是否满足偏航条件,若满足偏航条件,返回步骤1,不满 足偏航条件进行步骤3; 步骤3:判断是否满足偏航条件,若满足相遇条件,进行步骤4,不满足相遇条件,进行步 骤5: 步骤4:避开转向行为触发,判断是否满足避开条件,若满足避开条件,进行步骤6,不满 足避开条件,继续执行避开转向行为: 步骤5:判断是否满足终点条件,若满足终点条件,终点登陆,抵达目标点T,不满足终点 条件,返回步骤2; 步骤6:弧线绕行行为触发,判断是否满足相遇条件,若满足相遇条件,返回步骤4,不满 足相遇条件,进行步骤7: 步骤7:判断是否满足脱离条件,若满足脱离条件,返回步骤1,不满足脱离条件,返回步 骤6。 3.根据权利要求2所述的自主导航方法,其特征在于,所述四种行走行为方式具体如 下: 对准转向:在S、P和L处执行的旨在对准目标点T的原地转向动作,转向方向按最小转角 原则来决定,直到对准目标点T对准转向行走行为结束,其中$为起点,T为目标点,L为机器 人绕行障碍物边缘结束时所处的位置点,P为机器人直线前进过程中航向角发生偏离的位 置点; 直线前进:在对准目标点T后所执行的沿XT方向的直线行走动作,直到到达目标点T(此 时任务结束)或者航向角发生偏离(此时位于偏离点P)或者遇到障碍物(此时位于相遇点H) 为止,包括从S完成对准转向行为后的直线行走动作,航向角发生偏离后对准目标点T的直 线行走动作,以及脱离障碍物边缘后对准目标点T的直线行走动作: 避开转向:在障碍物边缘绕行过程中所执行的为远离障碍物而实施的原地转向动作, 2

CN105509729A 权利要求书 2/3页 当处于直线前进或弧线绕行行走行为过程中遇到障碍物,即Dgs检测到位于相遇点H,则触 发避开转向行走行为,直至Dg检测不到障碍物时避开转向行走行为结束,H表示机器人碰 到障碍物时所处的位置点: 弧线绕行:在障碍物边缘绕行过程中所执行的沿一定曲率半径圆弧绕行行走动作,当 遇到障碍物执行的避开转向行走行为结束时,则触发弧线绕行行走行为,直至再次遇到障 碍物(Dgs检测到下一个相遇点H)或满足脱离点条件,则弧线绕行行走行为结束。 4.根据权利要求3所述的自主导航方法,其特征在于,所述避开转向行为检测过程中按 施密特触发器有Rs<R以提高系统的稳定性,所述避开转向行为的方向确定方法是:当位于 相遇点H时障碍物位于机器人左侧则原地右转,反之原地左转,如果机器人避开转向一周, 则表示无法避开障碍物,停止运动,障碍物的方向通过Dg。来检测,设置R。>R以提高障碍物 检测的准确率,若在触角Dng探测范围内激光雷达共检测到m个障碍物点,计算其方位角 (相对于X轴)的算术平均值,记为,则有: n=1 定义如下的整型标志变量: f中≤90°, f 1, f90°<中≤180° 其中,fbt=0表示障碍物位于右侧,fbt=1表示障碍物位于左侧,当位于起点S和脱离 点L处时,该变量进行初始化有fobt=-1: 弧线绕行转弯方向与避开转向转弯方向对应,当遇到障碍物执行的避开转向为原地左 转,则弧线右转,反之弧线左转。 5.根据权利要求2所述的自主导航方法,其特征在于,所述对准条件具体为:判断对准 转向过程中机器人当前航向角是否沿着XT方向,用于连接对准转向与直线前进,对准条件 通过Hg判断,其定量表达式为0r=0xT,其中0r为机器人当前航向角,0xT表示矢线段XT的方 位角,若0=xT,直线前进触发,否则保持当前行为。 6.根据权利要求2所述的自主导航方法,其特征在于,所述偏航条件具体为:判断直线 前进过程中机器人是否位于偏航点P,即当前航向角是否偏离XT方向,用于连接直线前进与 对准转向,偏航条件通过Hg判断,其定量表达式为0r-0xT>0n,其中0m为预先设定的航向偏 离阈值,若0r-0xT>0n,对准转向触发,否则保持当前行为。 7.根据权利要求2所述的自主导航方法,其特征在于,所述相遇条件具体为:判断直线 前进或弧线绕行过程中是否遇到障碍物,即是否处于相遇点H,用于连接直线前进与避开转 向或弧线绕行与避开转向,相遇条件通过Dngs和Dngo判断,其中Dngs判断是否遇到障碍物, Dngo判断位于相遇点H时障碍物的方位,其定量表达式为dmin≤Rs,若dmin≤Rs,避开转向触 发,否则保持当前行为,其中dmi表示激光雷达探测范围内机器人与障碍物之间的最近距 离。 8.根据权利要求2所述的自主导航方法,其特征在于,所述避开条件具体为:判断避开 转向过程中是否避开障碍物,用于连接避开转向和弧线绕行,避开条件通过Dgb判断,其定 3

CN105509729A 权利要求书 3/3页 量表达式为dmin≥R,若din≥R,弧线绕行触发,否则保持当前行为;当机器人避开转向一 周,则表示机器人无法避开障碍物,导航任务失败。 9.根据权利要求2所述的自主导航方法,其特征在于,所述脱离条件具体为:判断在弧 线绕行过程中是否脱离障碍物边缘,即判断是否处于脱离点L,用于连接弧线绕行与对准转 向,脱离条件通过Hng和Sng判断,其中定量表达式为(0sx-0xT<0x0r-0xT≤0e&dxT≤ smax)0R(0sx-0xT<0x0r-0xT≤0e&smax≥Sstep),其中0为预先设定的直线重合度容差, 0:为预先设定的对准角度容差,0sx为矢线段SX的方位角,Sstep为预先设定的脱离阈值,smax 表示XT方向可无障碍直线行走的最大距离,若(0sx-0xT<00r-0xT≤0e&&dxT≤smax) 0R(sx-0xT<,|0-0xT≤0e&smax≥Sstep)),对准转向触发,否则保持当前行为。 10.根据权利要求2所述的自主导航方法,其特征在于,所述终点条件具体为:判断直线 前进过程中是否到达目标点T,用于判断整个导航任务是否完成,终点条件通过Lg判断,其 定量表达式为dxT≤de,其中de为预先设定的终点距离容差,dxT表示矢线段XT的长度,若dxT≤ d,启动终点登陆程序,导航任务结束,否则保持当前行为。 4
CN105509729A 说明书 1/9页 一种基于仿生触角的机器人自主导航方法 技术领域 [0001]本发明属于智能机器人领域,具体涉及一种基于仿生触角的机器人自主导航方 法。 背景技术 [0002]Bug算法是一种基于传感器的著名导航算法,它结合全局规划和局部规划的特点, 其路径规划是在直接应用传感信息的基础上引入一些全局信息,但只是一种“宏观”意义上 的理论算法,多运用于理论仿真,很难直接用于指导实际应用。Bug算法假设机器人为一个 质点,无实体物理尺寸,并要求机器人具有全方位的障碍探测和沿着障碍物边缘绕行的能 力,这一点对于实际机器人来说是极其困难的。Bug算法核心在于如何确定朝着目标点直线 前进和沿着障碍物边缘绕行两种基本行走模式的切换时机以及绕行障碍物边缘的具体方 式。 发明内容 [0003]有鉴于此,本发明从仿生学的角度出发,运用神经行为学原理提出了基于仿生触 角的机器人自主导航算法。该方法是一种实用的改进Bug算法,综合考虑了机器人实体物理 尺寸和实际环境复杂性的影响,解决了Bug算法两种基本行走模式的切换时机及绕行障碍 物的具体方式,解决了Bug算法难以实际应用的问题。 [0004]为实现上述目的,本发明采用以下技术方案: [0005]一种基于仿生触角的机器人自主导航方法,所述自主导航方法从仿生学的角度出 发,提出“仿生触角”模型来理解传感器信息,将机器人简化成半径为R的圆,R为机器人外 接圆半径,并包括多个检测单元。 [0o06]进一步的,所述检测单元分别为半圆环形触角Dngs、Dngb和Dngo,半径分别为Rs、R 和Ro,圆形触角Lng,箭头形触角Hng,以及位于正前方位置由矩形(2Rs×a)加半圆形(半径 Rs)组成的宽面积型触角Sng,Dngs、Dng用于检测用于探测激光雷达180°范围内最近的障碍 物点:Dnga用于检测位于相遇点时障碍物所处的方位:Lng用于记录依靠自身定位系统实时 得到的机器人位置;Hg用于记录航向传感器实时获得的机器人航向角:Sng用于检测当前 传感器探测范围内无障碍直线行走的最大距离sx: [0007]所述方法包括四种行走行为方式、六种行为触发条件,所述行走方式为:对准转 向、直线前进、避开转向、弧线绕行,所述行为触发条件为:对准条件、偏航条件、相遇条件、 避开条件、脱离条件、终点条件: [0008]所述方法步骤如下: [0009]步骤1:从起点$向目标点T行进,对准转向行为触发,判断是否满足对准条件,若满 足对准条件,进行步骤2,不满足对准条件,继续执行对准转向行为: [0010]步骤2:直线前行行为触发,判断是否满足偏航条件,若满足偏航条件,返回步骤1, 不满足偏航条件进行步骤3: 5