第7卷第2期 智能系统学报 Vol.7 No.2 2012年4月 CAAI Transactions on Intelligent Systems Apr.2012 D0I:10.3969/i.issn.16734785.201111015 网络出版t地址:htp://www.cnki.net/kcma/detail/23.1538.TP.20120309.1448.001.html 具有时变时滞耦合的二阶多主体系统的编队控制 来金钢,陈士华2,路晓庆2 (1.武汉理工大学自动化学院,湖北武汉430070:2.武汉大学数学与统计学院,湖北武汉430072) 摘要:多主体系统的编队控制是一类重要的网络协同控制问题.研究了在有向连接拓扑结构下,具有时变时滞耦 合的二阶多主体系统的编队控制问题.通过一种多层领导机制的框架建模,得到了时不变编队、时变编队和时变轨 迹追踪3种编队问题的充分性条件,并证明了各种预期队列是以指数的收敛速度形成的.数值仿真进一步验证了理 论结果的正确性,为该理论在实际中应用起到指导作用, 关键词:多主体系统;时变时滞;有向拓扑;编队控制 中图分类号:TP273文献标志码:A文章编号:16734785(2012)02-013507 Formation control for second-order multi-agent systems with time-varying delays LAI Jin'gang,CHEN Shihua2,LU Xiaoqing? (1.School of Automization,Wuhan University of Technology,Wuhan 430070,China;2.School of Mathematics and Statistics,Wu- han University,Wuhan 430072,China Abstract:The formation control problem for multi-agent systems is one of the most serious network cooperation con- trol problems.The formation control problem of second-order multi-agent systems with time-varying coupling delays in directed interaction topologies was investigated.Sufficient conditions were obtained for the attainment of both time-invariant and time-varying formations as well as for time-varying formations for trajectory tracking by using a special multi-leader framework that attained the formations at exponentially converging speeds.Some numerical sim- ulations were also conducted to validate the theoretical results in order to develop practical applications. Keywords:multi-agent system;time-varying delay;directed topology;formation control 作为一致性相关问题18】,多主体系统的编队息则可以被所有主体感知.然而,文献[9]的控制策 控制已经被众多领域的学者所研究,并广泛应用于 略是一阶协议,即通过控制主体的速度而不是加速 多种协同控制领域,包括无人驾驶飞行器、自制水下 度来改变主体的位移状态.在实际控制问题中,往往 潜艇和移动智能系统等.这种协同控制的关键技术 是通过控制加速度来实现的,这就需要设计一种二 是在各种环境制约下,均能保证各个主体的状态和 阶协议来实现编队控制.此外,在物理、生物以及电 队形都达到一致.从图理论、动力系统理论以及控制 力系统中,耦合时滞现象是无法避免的,忽略这一点 论等不同领域出发,各种编队控制方法931应运而 将会导致不可预测的严重后果.但现有的文献中很 生.其中大致可分为确定性系统和随机系统2种.例 少考虑带时变时滞耦合的编队控制问题 如,文献[9]提出了一种新的编队控制的框架,将编 本文将研究在有向连接拓扑结构中,一类带有 队信息分为全局和局部信息两大类,并假设只有一 时变时滯耦合的二阶多主体系统的编队控制问题 小部分主体可以获知全局编队信息,而局部编队信 采用文献[9]的多层领导框架建模,将所有主体分 为领导者和跟随者2类.假设每一个领导者可以获 收稿日期:2011-11-20.网络出版日期:2012-03-09 知全局编队信息,且只有一小部分领导者(高层领 基金项目:国家“973"计划资助项目(2009CB723905):国家自然科学 导者)可以根据状态偏离调整自身的位移并牵制其 基金资助项目(70571059). 通信作者:路晓庆.E-mail:lhxq@whu.edu.cn. 他领导者达到预期的编队.类似地,每一个跟随者可
·136 智能系统学报 第7卷 以获知局部编队信息,且只有一小部分跟随者(基 是不可约的,对角矩阵B=diag(b1,b2,…,bw)满足 层领导者)可以根据状态偏离调整自身的位移,并 b:>0,b:≥0,i=1,2,…,N,则矩阵L+B的特征 牵制其他跟随者达到预期的编队.进一步假设,每一 =1 根都具有正实部. 个领导者可以将自己获知的信息,通过整个编队的 演化过程直接或者间接地传递给其跟随者.本文的 记C([-T,0],R)为连续函数中:[-T,0]→ 目的就是在这种多层领导机制框架下,设计适应于 R"的赋范‖中‖e=maXoa[-,o‖中‖Banach空间. 时不变编队(time-varying formation,TVF)、时变编 下面给出著名的Lyapunov-Razumikhin定理is]. 队(time-invariant formation,TF)和时变轨迹追踪 引理2设f:C([-T,0],R”)→R”将 (time varying formations for trajectory tracking,TVFT) C([-T,0],R)中的有界子集映射到R”的有界子 集的函数中,定义如下泛函微分方程: 3类编队问题的二阶协议.其创新之处有2点:1)这 种基于多层领导机制的二阶协议适用于许多拥有多 rx=f(t,x(0),t>0, (2) 层管理系统的协作机构,每一层管理人员有不同的 lx(0)=(0),0∈[-r,0] 职责,因此具有潜在的应用价值;2)在设计二阶编 式中:0∈[-T,0],x(0)=x(t+),f(0)=0.令 队控制协议的时候,考虑了时变时滞耦合因素的影 u(s)、知(s)、w(s)为非降的连续函数,满足当s>0 响,这是以往编队控制问题没有提及的, 时,u(s)>0,(s)>0,w(s)>0,u(0)=v(0)=0, 当s+∞时,u(s)+0.如果存在一个连续函数: 1编队模型描述 R×R”→R,一个连续非降函数,p:R→R*满足s> 首先介绍文中用到的图理论知识[)和几个引 0时,p(s)>s,并且存在一个常数σ≥0,使得 理.设G=(V,e,A)为一个N阶加权有向图,其中顶 「 u(Ix‖)≤V(t,x)≤(‖x‖), l(t,x(t))≤-0(‖x(t)‖)+σ (3) 点集V={1,2,…,N},边集合εCV×V,邻接矩阵 A=(a)eRw×w满足aa=0,ag>0,当且仅当有一条 如果 从j指向i的边.有向图G的度矩阵D=diag(d1,d2, (t+0,x(t+))<(V(t,x(t))), …,d)eR满足4=yi=1,2,…,N,其中, H0∈[-r,0], 则式(2)的零解是一致最终有界的,进一步,当σ N:=j∈:(i,)∈e称为i节点的邻居集,矩阵L= 0时,该零解是一致渐近收敛的. D-A∈RWxw称为有向图G的Laplacian矩阵.若任 考虑有1个领导者(记为1,2,…,)和N-1个 意一组顶点(i,)间都有连边,则称有向图G是强连 跟随者(记为1+1,1+2,…,N)组成的系统.假设领 通的.特别地,当且仅当一个有向图G的Laplacian 导者的动力学行为与跟随者无关,但是跟随者则受 矩阵是不可约的,则该有向图G是强连通的.一棵 领导者的影响.把N个主体看作顶点,则主体间的 有向树是指一个由V个顶点和N-1条边组成的有 内部连接关系可以用一个有向图G来表示.记第i 向图,并且含有一条从根节点通向其余各顶点的有 个主体的运动状态为x:(i=1,2,…,l),并设其在n 向路径.相应地,有向图的一棵生成树是指与一棵有 维欧氏空间中运动,则其运动轨迹可以用式(4)所 向树有相同顶点集的子图。 示的动力系统描述 定义1N阶Laplacian矩阵L的Perron-Frobe 「x:=, nius标准型I3]为 y,=4, 0 x,,4eR",i=1,2,…,N, (4) L 0 (1) 式中:、:和4:分别是位移、速度和控制输入(可 以看作是加速度).记为 N={1,2,…,I},Ψ={l+1,l+2,…,N}, 式中:P为置换矩阵,1≤m<N,L:∈Rx”是一个标 x=[xx…xW]T,y=[…W]T, 量或者一个不可约子方阵,且N=T1+r2+…+rm x=[xx…x],y=[…] 由此可知,如果一个有向图是强连通的,则m=1; 定义1设F=[ff乃…]∈R(f= 如果一个有向图含有一棵生成树,则m>1.对任意 [ffT]TeR)是一个与时间相关的列向量,代表 的i>1,至少存在某个j满足1≤j≤i-1,使得 全局编队信息,W=[W+1W+2…W]∈Rw-m(其 Lg≠0. 中,W=[WW…W]∈R)是一个与时间无关的 引理14)如果有向图G的Laplacian矩阵L 行和为1的非负矩阵,代表局部编队信息.如果存在

第2期 来金钢,等:具有时变时滞耦合的二阶多主体系统的编队控制 ·137· 一个R值函数∫。=[f(t)T(t)](其中f”∈R", 个与Y相关的正常数).则应用协议(5)系统(4)的 feR),使得当t→o时,对ieN有x:→f+f 所有主体状态一致性可达. 和v:→f+f,对ieW有x:→(W☒Ln)x和:→ 证明记x=x:-f片,y=y:-f,则误差系统为 (W⑧1)则称系统(4)解决了编队问题特别地, 无=, 如果条件==招=加=0=”≠0且=加= 0=f≠0且=加≠0分别成立,那么对应地, =k∑a[y((t-r)-(t-T)+ 称该编队问题为时不变编队、时变编队和时变轨迹 (g-)]-b:[yx(t-)+],i=1,2,…,N 追踪问题 注意到向量F定义了由领导者确定的基本编 整理得到 队框架,非负矩阵W则给出了跟随者和其邻居间的 局部位移约束.由于W的行和为1,跟随者的最终 x=, 状态一定位于领导者状态的凸组合区域,因此W决 =-y(L+B)⑧1(t-T)- 定了跟随者的空间分布状况.而列向量F()则决定 k(L+B)☒In(t). 了整个编队的队形,与各个主体的初始状态和外界 控制输入相关 式中:x=[x…xW],v=[…W]I,B= diag(b1,b2,…,bw).令e(t)=[xT]T,L+B=H, 2编队模型分析 则得 本文的主要结论分为3部分:时变一致、时变编 (t)=Ye(t)+Ze(t-T), 队和时变轨迹追踪, 2.1时变一致 式中r-日女nsz-(m8a 首先考虑简化的编队问题:时变一致性问题, 以下证明H是正稳定的,因为G含有根节点为 假设f=f方=…=f=f,1=N,令粉=f6,”= r的有向生成树,不妨假设r=1.将L写为式(6)的 形式: 程=…==6如果对于每一个节点, lim‖x:-f‖=0和im‖y:-f6‖=0成立,则称多 01 (6) 主体系统时变一致性可达,此时,每一个主体都是领 式中:L,对应于根节点r=1,非奇异矩阵L2的特征 导者,都可以获知速度6和加速度信息,但是只 根都具有正实部.类似地,将对角矩阵B写成对角 有一小部分高层领导者可以获知彼此间的状态差异 块形式B=diag(B1,B2),其中B1=b1>0,B2= 以及编队信息.基于此,设计如下二阶协议: diag(b2,b3,…,bw).由b1>0得L1+B1正定,故H 4:=6+k∑ag[y(,(t-)-x,(t-)+ 正稳定.由Lyapunov定理知存在正定矩阵M满足 (y-)]-kb[y(x(t-r)-f6(t-r))+ MH+H'M=Iw,取Lyapunov函数: (:-f6)]. (5) V(E(t))=ve"(t)P E(t). 式中:i=1,2,…,N,k>0,0<y<1,b:≥0.A= (a)wxw是对应于有向图G的邻接矩阵.r(t)是连续 式中R=的o.显益, 可微函数,满足0<r(t)<ro,该协议和已有文献中的 mi(P)‖eI2≤V(e(t)≤Ama(P)‖e‖l2, 协议不同9,121.协议(5)是一个二阶协议,是通过控制 令E=Y+Z= 01w1 ⑧1n,则有 L-yH-kH 主体的加速度来间接控制其位移的.此外还考虑了信 息传输过程中出现的时变时滞耦合现象8], i(t)=Ee(t)-ZYE(t+s)ds. 定理1如果有向图G含有一棵根节点位于r 再令Q=-(EP+PE),则有 的有向生成树,满足b,>0,1≤r≤1,时变时滞r(t) 2= kI-M 满足: 0<T<T0= -M(1,-2w®1. 入min(Q) 当》时。 PZYP-YZPI+8PI 式中:T0是一个充分小的正数,并且k>k*(k*是一 (L-2M0)-(,-'()-'(Lw-M)=

·138· 智能系统学报 第7卷 (号-2.-w>0 = 城.+2,4-)- 故是正定的.根据入m(P)Ie‖2≤V(e(t))≤ 入m=(P)‖e‖2及引理2知,当r∈[-To,0]时, t-)门-[xe-)- V(e(t+r))<p(V(e(t)), 从而令p(s)=Bs(B>1),则有 含-1 -2e"PZYe(t+s)ds 2(-rzPe)'e(t+)山≤ kh:[y(x(t-r)-】 i,-))+ (-YZ'Pe)"p-(-YZPe)ds+ (y:-∑oy)],ieW, (7) e(e+s(p)ed:+d 式中:k>0,0<Y<1,b:≥0,C=(cg)xxw是有向图 G的邻接矩阵,时变时滞r(t)>0是一个连续函数, re'PZYp-'YZ're+∫,V(e(t+s)d≤ 满足0<r<To·则有如下结论. Te(PZYP-YZ'P +BP)e. 定理2如果有向图G含有一个根节点位于 进一步对V(ε(t))求导得到 的有向生成树且满足b,>0,1≤r≤1,时变时滞r(t) We)=-6'(E'P +PE)E-2e'PZY(t+s)ds 满足 入m(Q) -E'Qe+TE"(PZYP-YZ'P +BP)8-Ain(Q)E'E+ 0<T<T=PZYP-Y ZP +B P re(I PZYP-YZP‖+BIPI)e≤ 送,. 式中:T0是一个充分小的正数,并且斥>k*(k*是一 个与Y相关的正常数).则假设条件1)~3)满足时, To 系统(7)解决了时变编队(TVF)问题. 故 证明对i∈N时作变量变换x:=x:一f和 V(e)≤V(e(0))e"Ie‖≤, W(e(0)e-( 入min(P) 可=,-,对ieN作变量变换=-名,和 所以,应用协议(5)系统(4)的所有主体将以指数的 收敛速度达成一致. :=:一名0”,则系统(7)可以改写为: 2.2时变编队 x=,i=1,2,…,N; 此时编队的最终目的是:当i∈N时x:→f和 :→f,当ieW时x:(t)→(W☒In)x,y:(t)→ =宫-)--》+⑧ (W⑧1).为此,作如下假设: )]-b(yx,(t-T)+),i=1,2,…,N. 1)领导者集团的拓扑结构中有一棵根节点为r 定理1保证了x和”均以指数速度收敛到0, (1≤r≤)的有向生成树,并且领导者的动力行为不 由此可得,当t+o时,对ieN有x:(t)→f(t)+ 受跟随者的影响; f,且:()→f(t)+f",对i∈W有x:(t)→(W⊙ 2)每一个领导者可以感知全局编队信息F,并 在编队演化过程中将其传递给跟随者; In)x且:(t)=(W:⑧l).从而定理2证毕.特别 3)每一个跟随者可以直接或者间接地从领导 地,当i∈N时,令其一致状态为f,则有如下推论 者那里获知局部编队信息W. 推论如果全局编队信息F为时不变的,即 实际上,假设3)等价于在整个主体的拓扑结构 =f”=0,则在定理2的条件下,系统(7)解决了 中有一棵生成树,且根节点位于领导者集团中. IF问题. 采用如下控制协议: 2.3时变轨迹追踪 c=,i=1,2,…,N; 考虑∫。=[ff]T,相应的预期追踪轨迹由下 列方程确定: :=+k∑g{y[((t-)-(t-)- fo=f=g(tfe). (x,(t-r)-f(t-)]+[(-f)- 进一步假设条件4):连接拓扑结构中根节点可以感 (:-f)]}-h:[y(x(t-r)-f后(t-r))+ 知追踪的参考轨迹,则应用以下控制协议: (:-f)],ieN; =y,i=1,2,…,N;
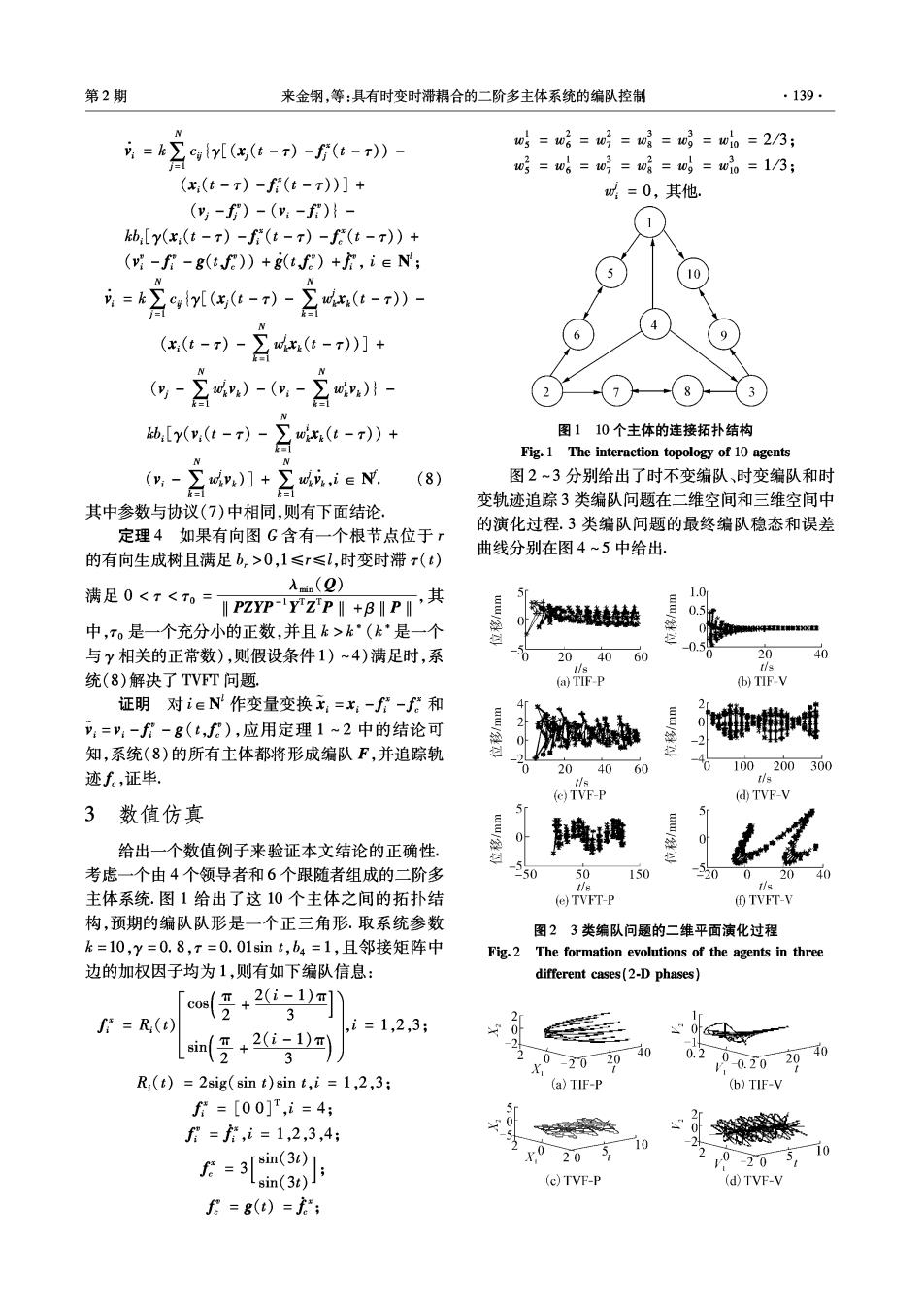
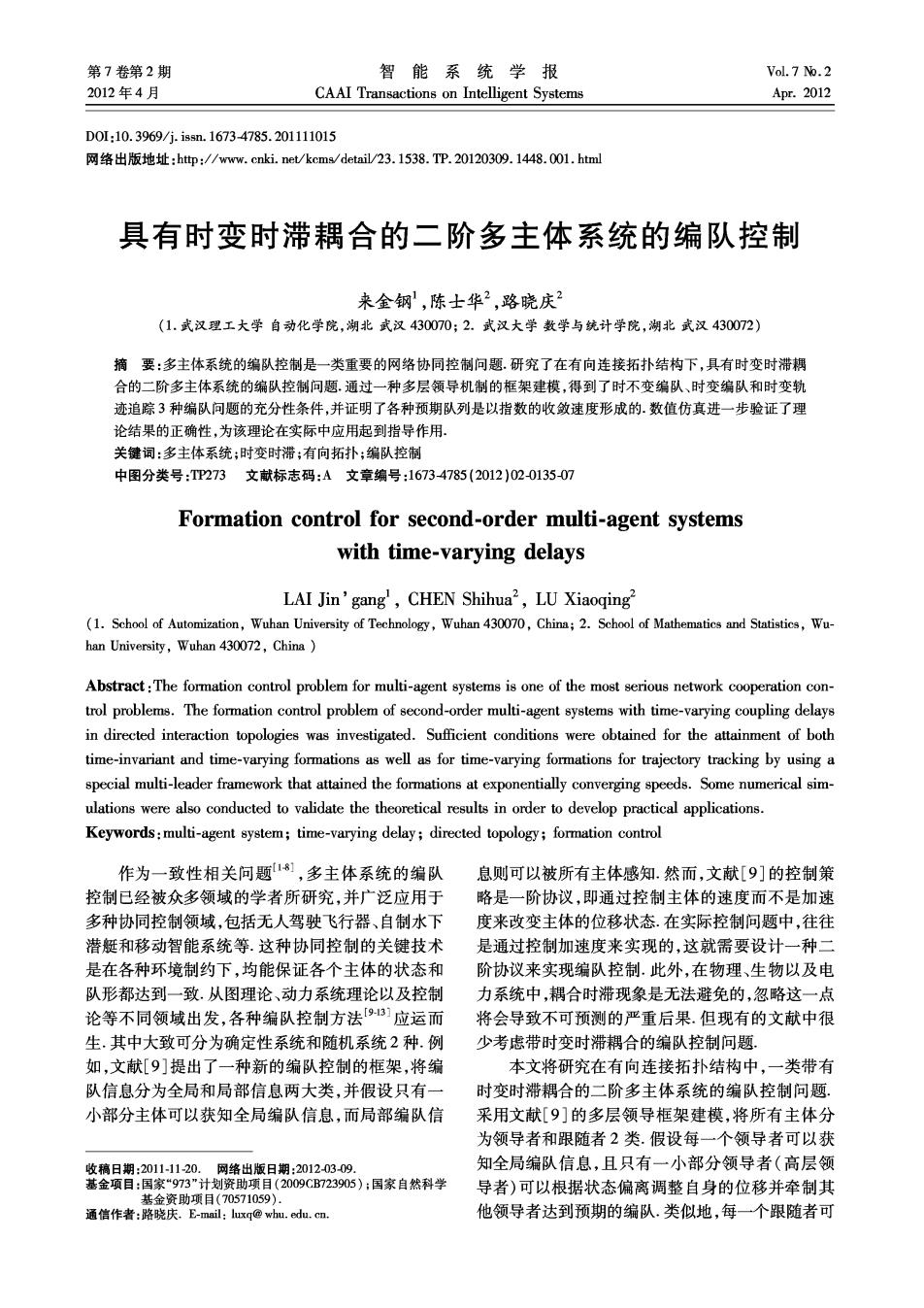
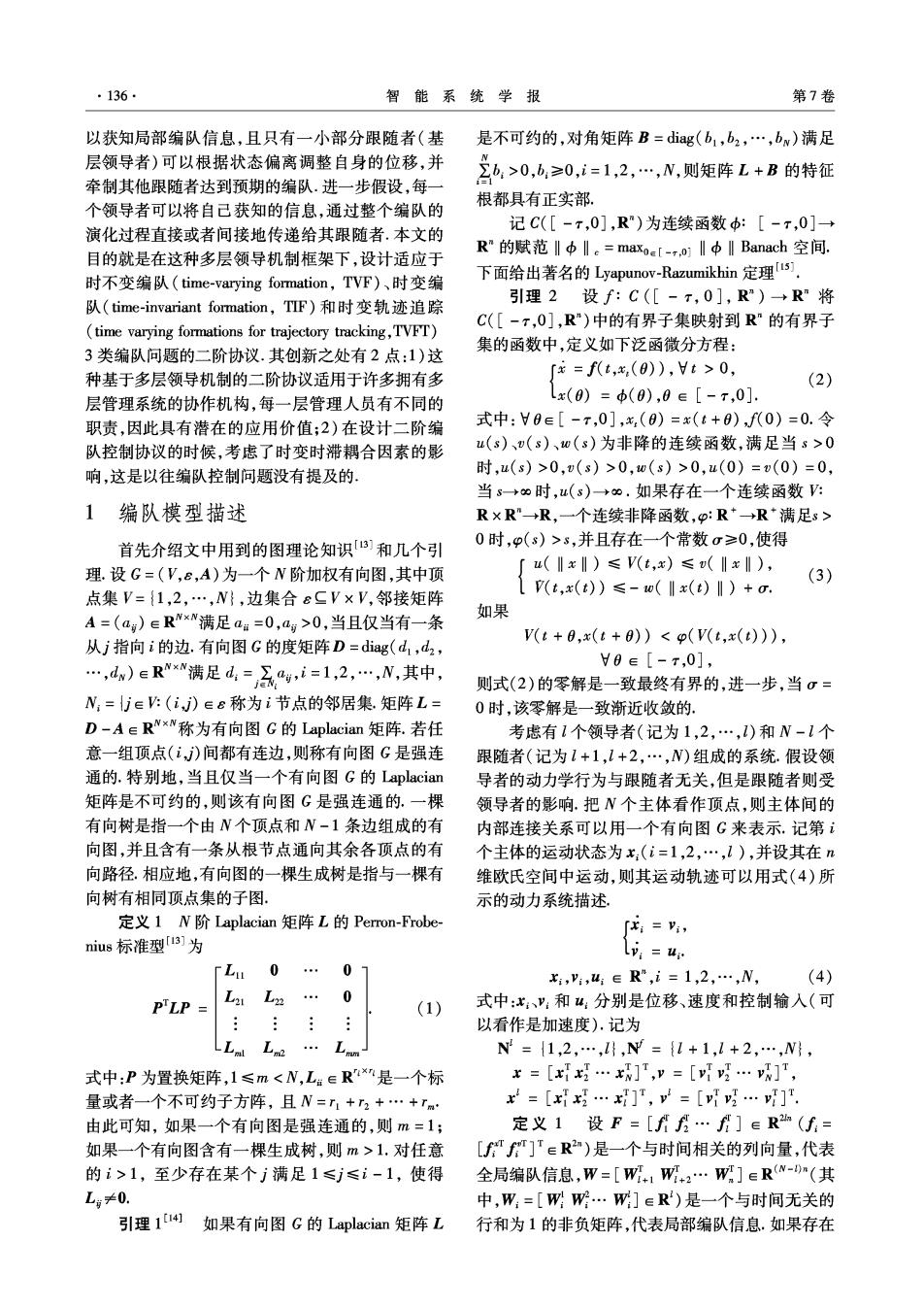
第2期 来金钢,等:具有时变时滞耦合的二阶多主体系统的编队控制 ·139· 或=文,[4-)-f4-》- 05=0话=o7=0=og=w0=2/3; 05=w6=07=08=0g=wi0=1/3; (x:(t-r)-f管(t-)]+ d=0,其他. (”-)-(v:-f)}- h:[y(x(t-r)-f(t-)-(t-)+ (vi-fi-8(tf:))+8(tf:)+iN; =,M-)--》- -)-宫4-刀+ g-)-(g-店- he-)-宫-》+ 图110个主体的连接拓扑结构 Fig.1 The interaction topology of 10 agents (-月,]+叫成ie (8) 图2~3分别给出了时不变编队、时变编队和时 变轨迹追踪3类编队问题在二维空间和三维空间中 其中参数与协议(7)中相同,则有下面结论. 的演化过程.3类编队问题的最终编队稳态和误差 定理4如果有向图G含有一个根节点位于ī 曲线分别在图4~5中给出. 的有向生成树且满足b,>0,1≤r≤1,时变时滞r(t) 入mn(Q) 满足0<1<o1Pzm-zP+B1PT,其 5 1.0 0.5H o 中,70是一个充分小的正数,并且k>k·(k·是一个 0.5 与y相关的正常数),则假设条件1)~4)满足时,系 20 4060 20 40 t/a 统(8)解决了TVT问题. (a)TIF-P (b)TIF-V 证明对ieN作变量变换x:=x:-f-f和 =:-f-g(t,f0),应用定理1~2中的结论可 -2 知,系统(8)的所有主体都将形成编队F,并追踪轨 2040 60 0100200300 迹f。,证毕. (e)TVF-P (d)TVF-V 3数值仿真 给出一个数值例子来验证本文结论的正确性. 考虑一个由4个领导者和6个跟随者组成的二阶多 50 50 150 20 0 20 40 t/s 主体系统.图1给出了这10个主体之间的拓扑结 (e)TVFT-P (0TVFT-V 构,预期的编队队形是一个正三角形.取系统参数 图23类编队问题的二维平面演化过程 k=10,y=0.8,r=0.01sint,b4=1,且邻接矩阵中 Fig.2 The formation evolutions of the agents in three 边的加权因子均为1,则有如下编队信息: different cases(2-D phases) m(+2 f*=R(t) sim(受+2,1) =1,2,3; 3 0-2020 40 X 0.2002029 40 R:(t)=2sig(sin t)sin t,i=1,2,3; (a)TIF-P (b)TIF-V ff=[00],i=4; f=f,i=1,2,3,4; 0 r-m: x020车10 · -24 020,10 (e)TVF-P (d)TVF-V fe=g()=;