第7卷第4期 智能系统学报 Vol.7 No.4 2012年8月 CAAI Transactions on Intelligent Systems Aug.2012 D0I:10.3969/j.issn.16734785.201112006 网络出版地址:htp:/nw.cnki.net/kcma/detail/23.1538.TP.20120803.1630.002.html 基于外骨骼机器人技术的人体手臂 震颤抑制的理论和方法 孙建,向馗2,高理富,李涛2,葛运建 (1.中国科学院合肥物质科学研究院,安徽合肥230031;2.武汉理工大学自动化学院,湖北武汉430070) 摘要:介绍国内外利用康复医疗机器人技术和信号处理技术对人体手臂震颤进行抑制的主要研究成果,重点阐述 基于“非药物”途径抑制人体手臂震颤的几个关键研究问题:1)震颤现象及其发生机制;2)常见震颤疾病的治疗现 状;3)震颤信号的检测、分析、处理以及工程建模方法;4)基于康复机器人技术的手臂震颤抑制策略;5)震颤抑制效 果的评估研究.并且重点介绍利用基于傅里叶变换的信号处理技术对震颤信号进行采集、处理与分析的研究现状, 以及利用康复医疗机器人技术对震颤信号进行补偿与抑制的相关策略的研究现状分析,探讨“非药物”途径抑制人 体手臂震颤的若干难点,为今后的研究工作奠定了基础. 关键词:震颤;抑震机器人;希尔伯特黄变换;EMD分解;信号处理 中图分类号:TP18文献标志码:A文章编号:16734785(2012)040283-11 A comprehensive review of fundamental theory and methodology for tremor suppression of human arm based on robotic exoskeleton technology SUN Jian',XIANG Kui2,GAO Lifu',LI Tao2,GE Yunjian' (1.Institute of Intelligent Machines,Chinese Academy of Sciences,Hefei 230031,China;2.College of Automation,Wuhan University of Technology,Wuhan 430070,China) Abstract:The paper introduces a comprehensive review of research work about tremor suppression of human arm based on the theory and methods of "Non-Medication"Methodology (robotic exoskeleton technology and signal processing tech- nology)as the following aspects:1)tremor and tremor mechanisms;2)treatment of common tremor disorders;3)trem- or signal extraction and processing;4)control strategies for tremor suppression based on rehabilitation robotic exoskele- ton technologies;5)study on the evaluation of tremor suppression strategies.In particular,special focus has been put on the current research on the tremor signal extraction and processing based on the Fourier technology and the Hilbert- Huang transform(HHT)and the ambulatory and non-ambulatory tremor reduction and suppression technologies based on the rehabilitation robotic exoskeleton technologies.The paper introduces a comprehensive investigation of the key issues of the theory and methods of"non-medication"tremor treatment,which lays the foundation for subsequent research. Keywords:tremor;robotic exoskeleton;Hilbert-Huang transformation;EMD;signal analysis and processing 震颤行为是中老年人手臂的常见现象,是人体状态山.震颤广泛存在于多种疾病之中,是最常见 某个或多个功能区肌肉的节律性、近似正弦往返摆 。 的运动障碍之一.调查表明,在总人口中,约10%存 动的肢体运动,是关节周围肌肉收缩和松弛的动力 在不同程度和类型的震颤现象,60岁以上的老年人 中约有38%的人存在不同程度、不同类型的震 收稿日期:2011-1208.网络出版日期:2012-0803. 基金项目:国家自然科学基金资助项目(61105087):安敬省自然科 颤231.帕金森氏病是导致震颤的常见疾病,近20年 学基金资助项目(090412039). 呈高发趋势,每10万患病人数中,西方为106~307 通信作者:孙建.E-mail:jsun@im.ac.cn

·284. 智能系统学报 第7卷 人,亚洲为44~82人,非洲为31~58人.其中39岁 1.2震颤起源及其发生机制 以下者发病占10%,40~49岁为20%,50~59岁为 人类对于震颤的研究可以追潮到1886年Scha 40%,60岁以上人群中患病率约达1%,其病因至今 fer等发现震颤现象,从那时起,有关于生理性震颤 尚不明4.震颤常见于人的肢体特别是手臂,影响 的研究就引起了广大研究者的兴趣并伴随大量的争 精细动作、书写和用餐,严重时可对病人的日常生 论[1o.大多数研究者认为,生理性震颤的研究能够 活、工作、社会交往等带来诸多不便.尽管震颤本身 对神经肌肉控制机制的研究提供一些线索,而对于 不能危害生命,但是它对人们的正常运动造成很大 生理性震颤机制的彻底澄清有助于阐明很多病理性 的影响,65%的震颤患者不能进行正常的日常生活. 震颤的起源.Lippold研究表明,用于使肢体保持姿 另外,震颤患者的特征还表现为肌肉僵硬、步态慌 势的反射机制可能会对生理性震颧的发生起到重要 张、动态迟缓,而这些特征经常被误认为是老年人的 作用io.在Lippold的研究基础上,Stein参考了肌 正常表现,因此容易延误治疗4] 肉的特征和感觉反馈通路(sensory feedback path 在医学领域,国内外对震颤的研究已有多年,但 wys),设计了一种确定性模型,用于描述运动神经 大多数类型的震颤运动的机理和起源至今尚未明 元的激活函数,进而估计震颤源2s].Stein是能够 确5,通过“对症下药”的方法在目前的医学水平下 用实验证明反馈机制对于生理性震颤起作用的众多 显得“力不从心”.在较短时间内开发出抑制患者震颤 研究者之一,其研究表明,由于肌肉和惯性载荷的交 的普适性药物比较困难,而震颤带给患者的诸如精细 互作用,在感觉反馈通路缺失的情况下,肌肉会产生 动作、手写和用餐等日常生活的不便问题在短期内难 阻尼振荡.Timmer是另外一名投入大量精力研究震 以解决.因此,尝试利用新途径(非药物治疗)对震颤 颤发生机制的学者.他利用互谱分析(cross-spectral 运动及其抑制开展的研究便显得非常有意义, analysis)来研究反射机制在生理性震颤中的作用, 其研究表明,生理性震颤可以被描述成线性随机过 1震颤及其研究现状 程,而病理性震颧可以描述成非线性过程145].另 1.1震颤及其临床分类 外,Timmer引入一种随机反馈系统,该系统利用一 震颤是人体某一个或多个功能区肌肉的有节律 种反曲非线性函数描述运动神经元的激活函数,研 性、近似正弦往返摆动的肢体运动,是关节周围肌肉 究结果证明,反射机制确实有助于震颤运动的发生, 收缩和松弛的动力状态.作为最为普遍的运动障碍 在一定程度上能够改变震颤运动的频率、放松时间 之一,震颤本身是人体运动神经元异常同步化的结 和振幅s-o].因此,Timmer认为,造成生理性震颤的 果6.现行的分类系统主要包括2种3,刀,一种是 主要原因是手臂的共振行为和由运动神经元募集反 依据震颤肢体活动状态的行为学分类,另一种是根 应引起的肌电同步活动.但是,并没有充足的证据能 据基础疾病的病因学分类.目前,国际上更加侧重于 够证明反射机制是造成震颤运动的首要原因, 后者,从病因学的角度分析,震颤主要包括两大 综合来看,尽管目前国内外对震颤的研究进行 类8]:生理性震颤和病理性震颤.生理性震颤是伴 了很多年,对各种震颤可能的产生机制有所了解,但 随患者肢体正常运动的小幅度震颤,是运动启动和 大多数类型震颤的发生机理和起源至今尚未明确, 终止过程中不可缺少的组成部分,其作用是使整个 从已有的文献来看产生震颤可能的机有制9,15]:1) 运动系统处于一个不断运动的振荡状态,从而达到 肢体的机械震颤,这种机制是导致震颤的最简单的 调节运动的目的.根据震颤的病因学特点,并考虑到 诱发因素,类似于物理学的机械性共振,2)中枢神 震颤频率、震颤诱发因素、既往史、家族史和神经体 经系统的反射.人身体某部分方向的屈肌运动将拉 征等,将病理性震颤分为如下类型291:生理性震 伸伸肌,导致一系列传入冲动,引发拮抗肌的牵张反 颤,增强的生理性震颤、特发性震颤、帕金森震颤、小 射.伸肌激活的同时,屈肌将被拉伸,来自屈肌的大 脑性震颤、红核性震颤、精神性震颤和药物毒物诱发 量传入纤维进入中枢系统,产生屈肌的反射活动.当 的震颧.病理性震颤的病理机制比较复杂,不同类型 发射存在并且传入和传出神经的传导时间适宜时, 的病理性震颤存在各自不同的生理机制,其本身影 将产生震颤.理论上讲,传导距离越长,震颤频率越 响患者肢体运动的协调。 低.3)中枢振荡器的存在假说.4)前馈或反馈系统
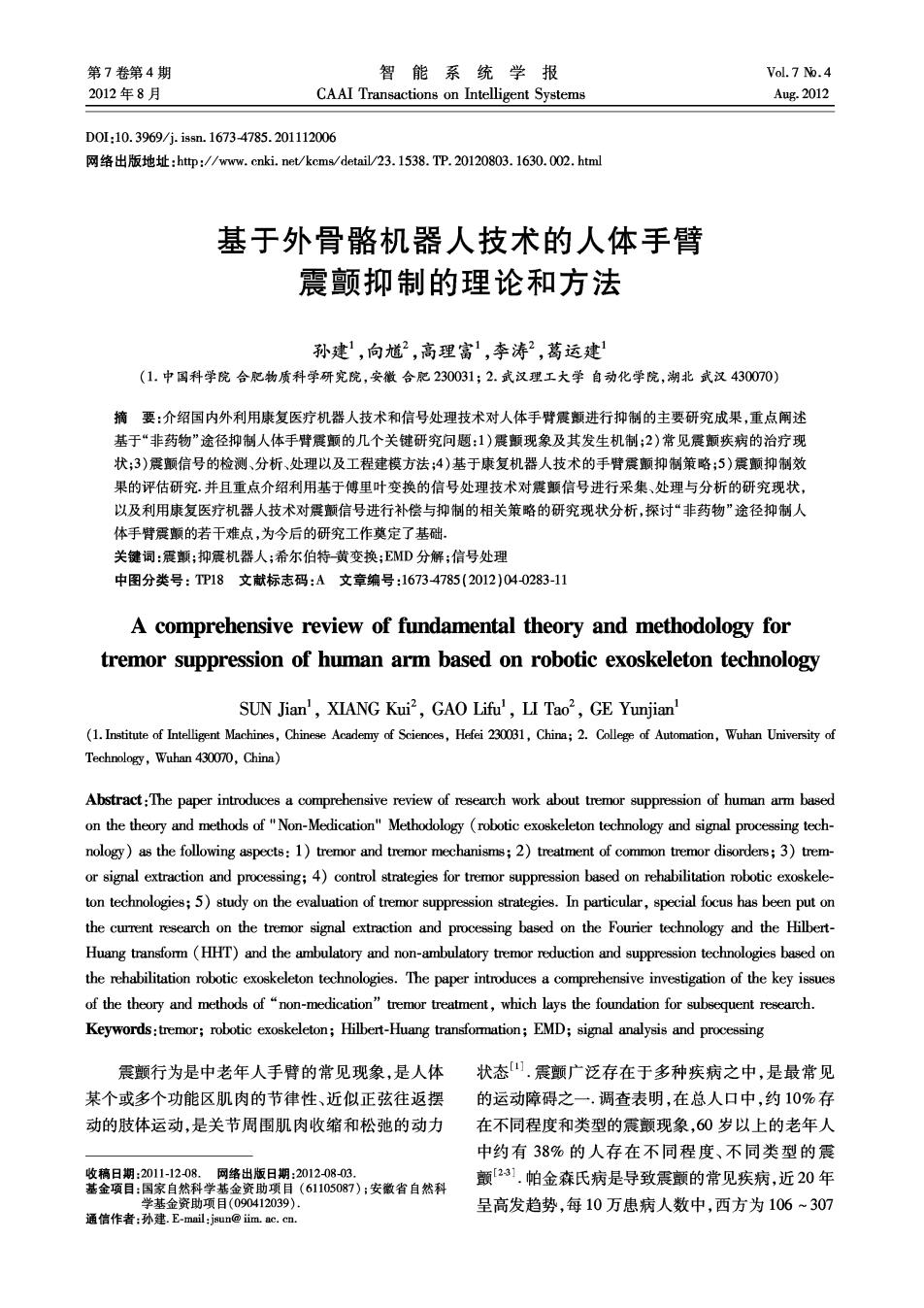
第4期 孙建,等:基于外骨骼机器人技术的人体手臂震颤抑制的理论和方法综述 ·285· 紊乱.临床上,医生在诊断患者震颤疾病时,除了参 2 震颤信号采集及其处理方法 考以上4种机制之外,还要考虑震颤频率、震颤的诱 发因素、既往史、家族史和神经体征等.因此,震颤患 日常生活情况下,震颤患者所做的运动基本都 者的诱发病因和发生机理的研究,需要涉及多方面 包括2种类型的运动:正常运动和震颤运动.这样, 的考察因素,而各种不同类型的震颤运动的起源更 传感装置所获取的信号中至少包括2种类型的信 是众说纷纭,无法统一 号:正常运动信号和震颤运动信号.如图1所示,传 1.3常见震颤疾病的治疗现状 感器装置所获取的信号是正常运动信号和震颤运动 常规药物治疗是目前治疗震颤运动疾病的主要 信号的叠加.从数学意义上来说,正常运动信号和震 手段.由于目前引起震颤运动的机理和起源尚未明 颤运动信号都是时间序列,可以通过诸如频率变化、 确,对其治疗大多采用探索性方式,无法从根本上治 相位漂移、幅值波动、时刻转换、运动形式变化等特 愈.例如,用于治疗特发性震颤(ET)的常见药物有 征进行描述.正常运动信号频率较低,一般低于 普萘落尔(propranolol)、美多洛尔(metoprolol)、阿罗 1Hz.手臂震颤信号的频率一般为2~20H,振幅为 洛尔(arotinolol)等[n1.普萘洛尔为肾上腺B2受体 100m(单方向)16,19] 阻断药,主要抑制B2受体(B2受体与震颤有密切关 20 系,且疗效与剂量密切相关,一般从小剂量递加,分 3次服用才见效果),副作用主要表现为心率降低、 正常运动信兴①震颤运动信号 支气管痉挛、抑郁、疲乏等.美多洛尔为选择性B受 体阻断药,易透过血脑屏障,但仍然有诸如减慢心率 等副作用.阿罗洛尔兼有:、B2受体阻断作用,因可 阻断骨骼肌B2受体,亦可治疗ET,其副作用表现为 头晕、胸闷、面部麻木,偶尔对正常血压稍有降低,但 -100 仅发生在少数患者中.目前对于帕金森氏疾病引 120 20253035 40 起的震颤,可用3种方法进行治疗81:1)药物治疗, 例如左旋多巴、息宁、金刚烷胺、溴隐亭与培高利特, 图1正常运动信号和震颤运动信号 这些药物虽能使震颤患者的临床症状在一定时间内 Fig.1 The voluntary movement signal and the tremor 获得一定程度的好转,但都存在不同程度的副作用 signal (恶心呕吐、异动症、幻觉、体位性低血压、疲乏等); 从本质上来说,震颤信号本身是多频率、实变的复 2)外科治疗,例如通过立体定向切除苍白球的后腹 杂非平稳信号,其频率的统计特性随时间变化.研究人 侧部(苍白球切开术)可显著改善“关”状态下的动 体手臂震颤抑制措施,首要工作就是探索一种实时、有 作过缓以及左旋多巴诱发的动作困难;虽然实验证 效的信号处理方法,实现正确区分患者正常运动信号 明这种方法能较明显地提高该病的临床缓解率,减 和震颤运动信号的目的.实际上,震颤频率和幅值的分 析是研究震颤信号特性的重要手段.随着计算机技术 少了副作用,但也存在价格昂贵、适应症严格、疗效 的发展,对反映震颤患者运动参数的加速度信号、电生 尚难肯定等问题;3)物理治疗,重要的是要让病人 理变化的肌电信号以及脑电信号等的分析为这些问题 尽可能保持各种活动,但是目前还未见商用的抑制 提供了一个辅助研究的新途径0] 人体震颤运动的康复装置的有关报道, 近年来,已经有很多关于震颤消除的信号滤波 总体来说,常规药物是目前治疗震颤运动疾病 的研究,特别是针对病理性震颤信号的滤波2122], 的主要手段.该方法虽能使震颤患者的临床症状在 大部分的研究工作采用有限冲激响应线性均衡 一定时间内获得一定程度的好转,但不能阻止引起 器3-4]对震颤数据进行训练或者采用低通滤波器 震颤疾病的自然发展,且各种药物都有不同程度的 方法消除所有频率高于2Hz的震颤运动信号251.这 副作用,因而限制了其自身在临床上的应用,致使患 些方法虽然在一定程度上能够实现消除震颤的目 者的震颤疾病无法从根本上治愈,而患者的生活不 的,但其自身存在的时间延迟导致其无法实现自适 便问题短期内无法得到有效解决, 应噪声消除,而低通滤波器无法充分对震颤运动进
·286· 智能系统学报 第7卷 行建模 好地实现2种信号的分离, C.Vaz等在最小均方算法LMS算法的基础上, FLC、WFLC以及BMFLC算法各自均含有一定 构建了一种自适应滤波器—傅里叶线性组合器 的局限性.在通常情况下,震颤运动信号频率不是已 (Fourier linear combiner,FLC)算法[26].FLC是一种 知的,而是随时间变化的.LC算法只能估计频率已 自适应的滤波器,在频率已知的情况下,该算法可以 知的准周期信号,并不能有效地模拟震颤运动信号, 有效地估计震颤运动信号,实现震颤运动信号与正 WLC虽然可以追踪频率已知的信号,但是可以追 常运动信号之间的分离.该算法本身计算量并不很 踪的频率范围比较小;另外,WFLC的频域分辨率比 大,可以看作是自适应陷波器.但是,在通常情况下, 较小,频率相差1Hz左右的信号分离效果较差.虽 震颤运动信号频率不是已知的,而是随时间变化的, 然在给定频带的情况下,BMFLC可以追踪多种频率 FLC只能对预知的特定频率的震颤信号处理有效 的调制信号,但是频带的选择影响其计算效果,且 果.Riviere等对FLC算法进行扩展,构造了一种加 BMFLC的计算量较大, 权频率傅里叶线性变换算法(weighted-frequency J.Z.Zhang29]、E.Rocon3o]等分别尝试利用希 Fourier linear combiner,WFLC)[2-8].像FLC算法一 尔伯特一黄变换技术对震颤信号进行分析与处理, 样,W℉LC算法仍然把震颤信号构建为输入被截断 利用经验模态分解把震颤信号与正常运动信号进行 的傅里叶级数的动态模型.但与LC不同的是, 分离,然后利用希尔伯特变换对震颤信号进行分析 WLC不仅调节该模型的傅里叶系数,而且还调节 与处理,获取其频率、幅值等信息.但是,他们的研究 该模型的频率,以使该模型能够与输入信号进行匹 工作仅仅是利用希尔伯特-黄变换对震颤信号处理 配.因此,WFLC比较适合对震颤运动信号的处理与 进行原理性验证,并没有构建一种实用化的震颤信 分析.但是,W℉LC是建立在震颤运动信号可以被构 号处理算法 造成正弦信号模型或傅里叶级数的基础上的,其本 总之,现有的处理和分析方法都是在假定震颤 身是基于动态截断傅里叶序列的变换,这就导致它 运动信号是一种近似正弦信号的平稳性信号的基础 自身存在很大的局限性或缺陷:一次只能实现2种 上展开研究的,并不能解决复杂非平稳信号的时频 频率不同的信号的分离.而通常情况下,震颤运动信 分析问题,这就导致现有的方法诸如LC、WFLC以 号是多频率的非平稳信号,如果要实现不同频率的 及BMFLC等算法都存在着自身无法克服的局限 震颤运动信号的分离,需要多次使用WFLC.另外, 性一只能实现对震颤运动信号进行粗略分析或者 WFLC的频域分辨率低.对于2个频率十分接近的 给出一个总的平均效果,不能描述各频率之间的相 信号(频率相差小于0.5Hz),WLC将无法很好地 互关系,更无法精确获取每一个时刻下的频率,因而 实现2种信号的分离,其原因在于,参考信号使用动 无法从根本上实现震颤运动信号与正常运动信号的 态傅里叶截断序列,其本身受到Heisenberg不确定 分离 原理的限制 3手臂震颤抑制策略 为解决WLC算法存在的问题,W.T.Ang提出 -种有限频带多重FLC(bandlimited multiple-Fourier 已有的研究表明,除了常规药物治疗以外,生物 linear combiner,.BMFLC),用于估计具有多种频率 力加载技术(biomechanical loading,BL)和功能性神 的震颤信号.像WFLC一样,BMFLC算法选择正弦 经肌肉刺激(functional neuromuscular stimulations, 信号和余弦信号的线性组合系列作为BMFLC的输 NS)技术是抑制震颤运动最为有效的2种措 入参考信号[2].该算法把所感兴趣的震颤信号的频 施036).如图2所示,生物力加载技术是一种物理 带进行等分,然后对每份“频带”信号进行LC处 方法,通过控制机器人产生阻抗运动,产生与患者震 理.与LC算法相比较,该算法消除了谐振因子,可 颤运动“相反”的运动,试图改变患者手臂的阻抗特 以区分频率十分接近的信号.与WFLC相比,该算 性,起到抑制手臂震颤的效果.功能性神经肌肉刺激 法能够追踪的信号频率更广,同时在频域上的分辨 技术是一种生物方法,通过电刺激技术产生与患者 率更大.但是,BMFLC也是基于动态截断傅里叶序 震颤“相反”的运动,控制患者手臂肌肉的收缩特 列的变换,频域分辨率存在上限.如果2个频率十分 性,起到抑制手臂震颤的效果. 接近的信号(频率相差O.3Hz),BMFLC将无法很
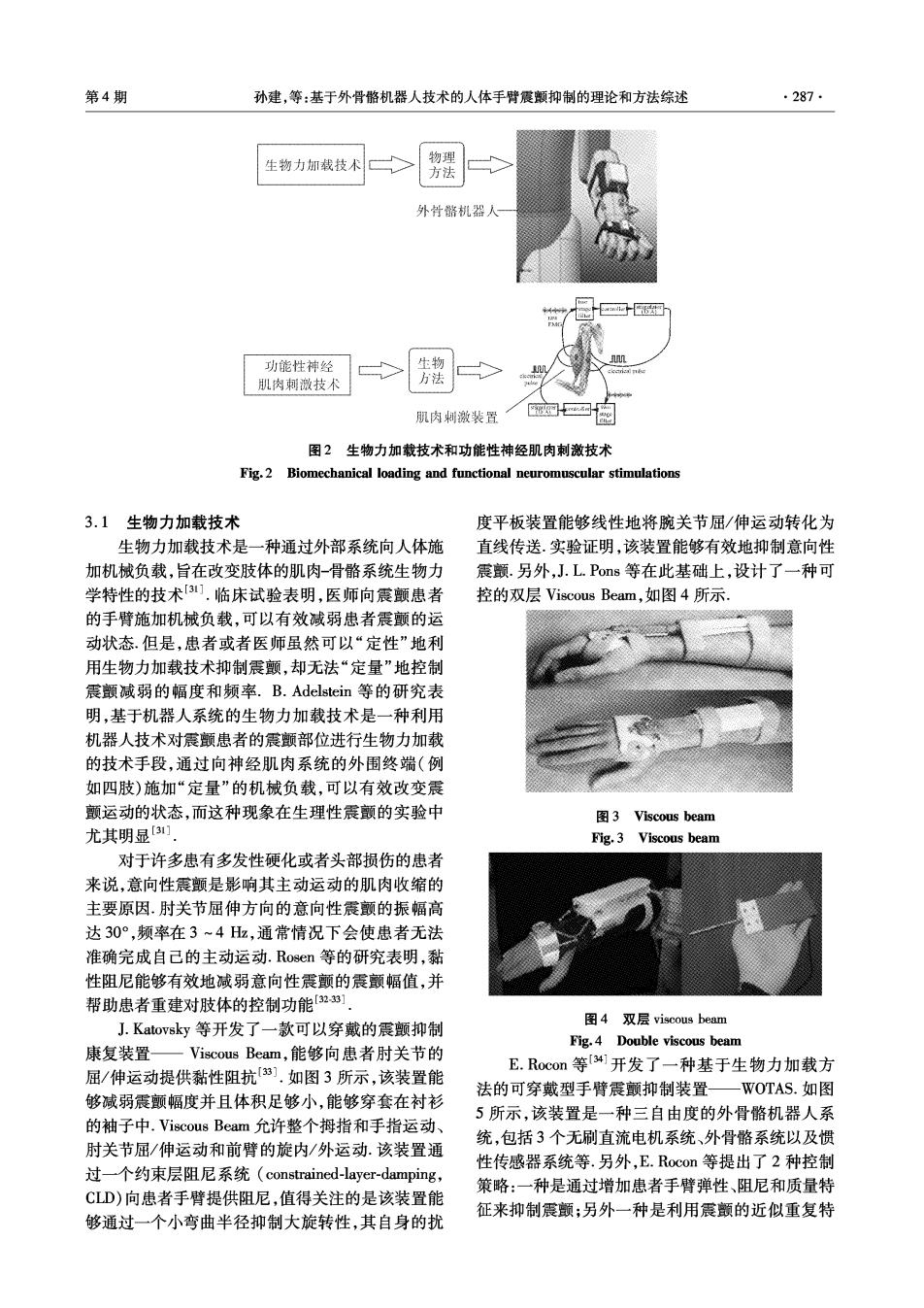
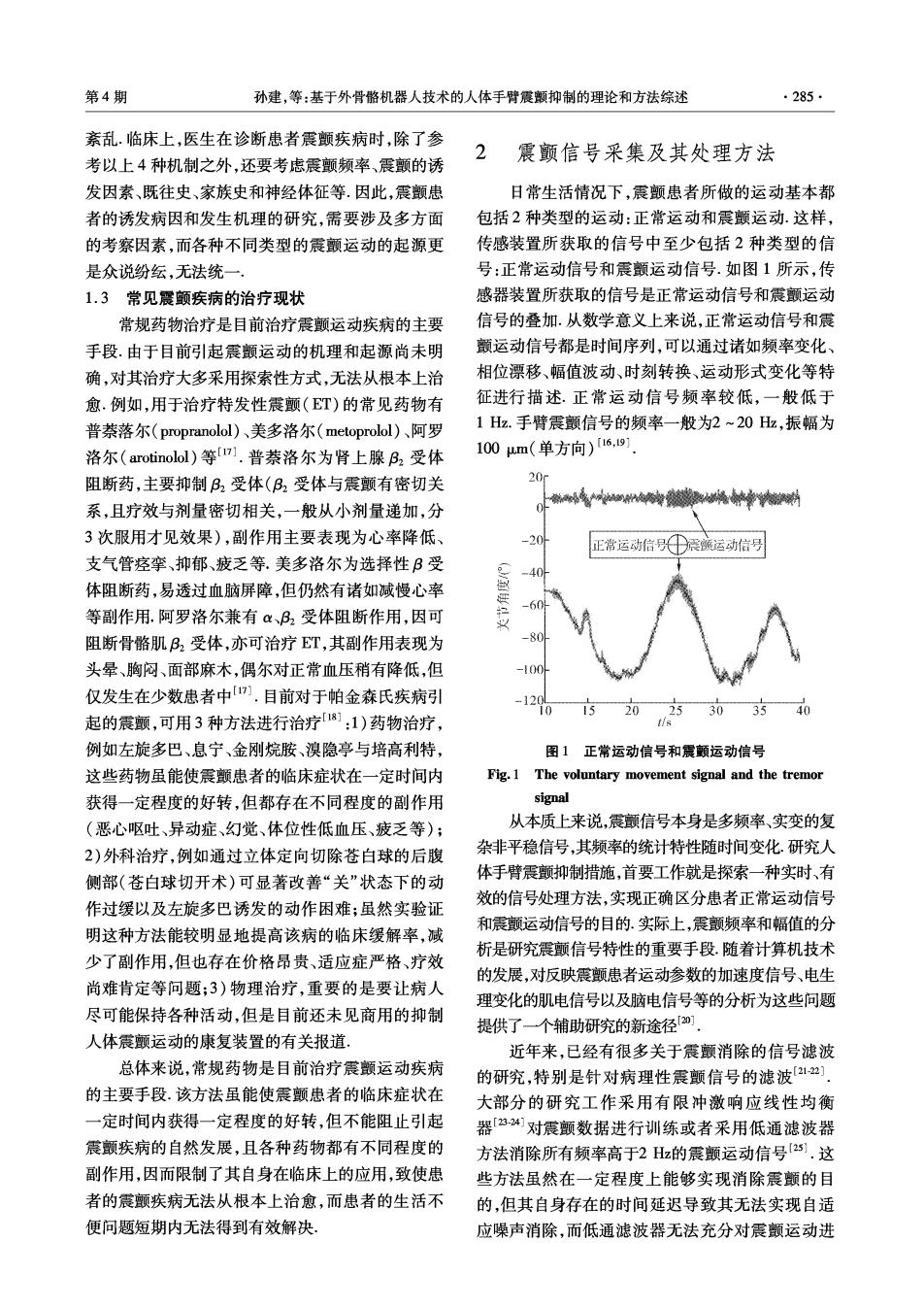
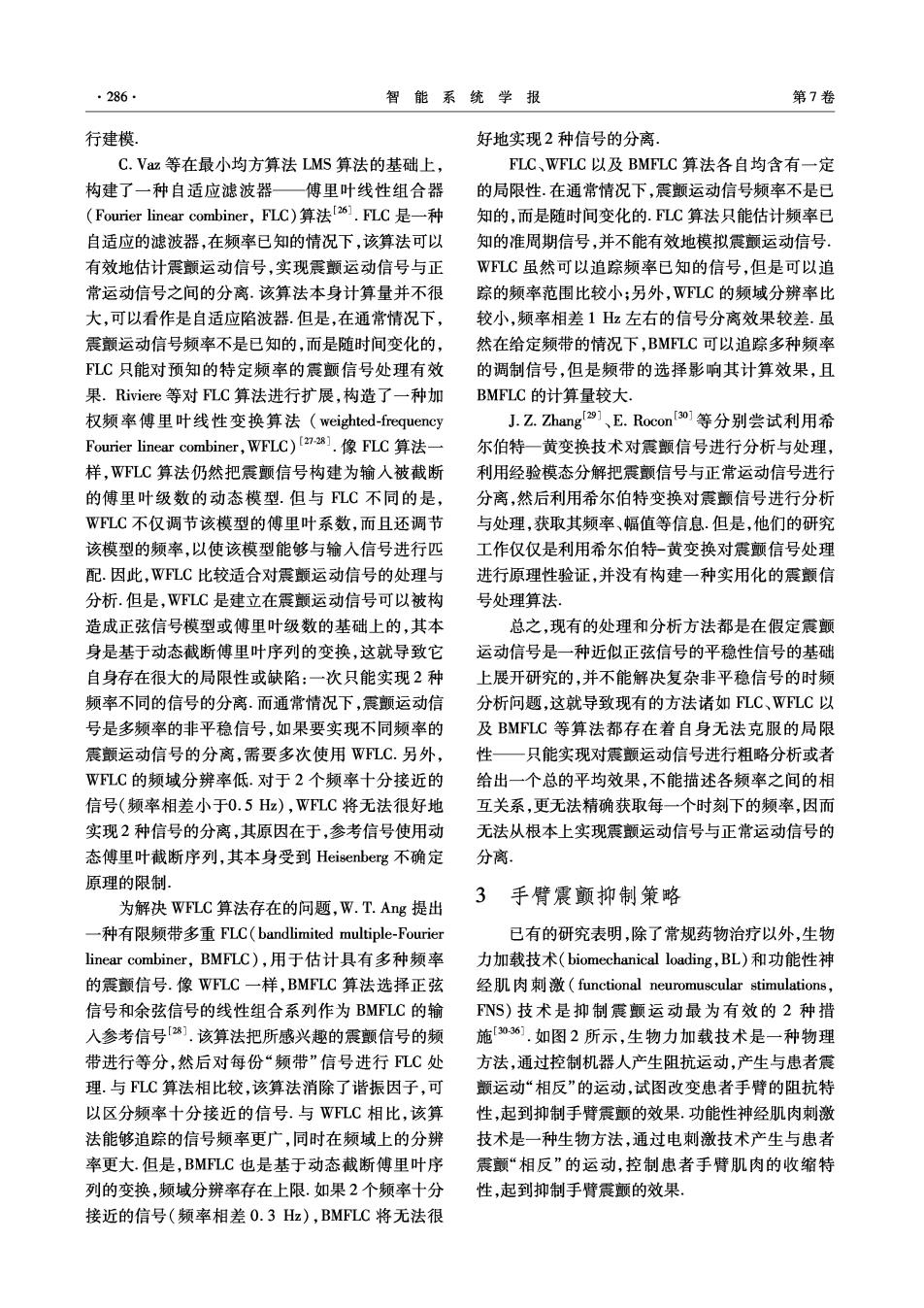
第4期 孙建,等:基于外骨骼机器人技术的人体手臂震颤抑制的理论和方法综述 ·287· 生物力加载技术 物理 方法 外背骼机器人 功能性神经 生物 肌肉刺激技术 方法 肌肉激装置 四 图2生物力加载技术和功能性神经肌肉刺激技术 Fig.2 Biomechanical loading and functional neuromuscular stimulations 3.1生物力加载技术 度平板装置能够线性地将腕关节屈/伸运动转化为 生物力加载技术是一种通过外部系统向人体施 直线传送.实验证明,该装置能够有效地抑制意向性 加机械负载,旨在改变肢体的肌肉-骨骼系统生物力 震颤.另外,J.L.Pons等在此基础上,设计了一种可 学特性的技术「31】.临床试验表明,医师向震颤患者 控的双层Viscous Beam,如图4所示. 的手臂施加机械负载,可以有效减弱患者震颤的运 动状态.但是,患者或者医师虽然可以“定性”地利 用生物力加载技术抑制震颤,却无法“定量”地控制 震颤减弱的幅度和频率.B.Adelstein等的研究表 明,基于机器人系统的生物力加载技术是一种利用 机器人技术对震颤患者的震颤部位进行生物力加载 的技术手段,通过向神经肌肉系统的外围终端(例 如四肢)施加“定量”的机械负载,可以有效改变震 颤运动的状态,而这种现象在生理性震颤的实验中 图3 Viscous beam 尤其明显3]」 Fig.3 Viscous beam 对于许多患有多发性硬化或者头部损伤的患者 来说,意向性震颤是影响其主动运动的肌肉收缩的 主要原因.肘关节屈伸方向的意向性震颤的振幅高 达30°,频率在3~4Hz,通常情况下会使患者无法 准确完成自己的主动运动.Rosen等的研究表明,黏 性阻尼能够有效地减弱意向性震颤的震颤幅值,并 帮助患者重建对肢体的控制功能[3233] 图4双层viscous beam J.Katovsky等开发了一款可以穿戴的震颤抑制 Fig.4 Double viscous beam 康复装置一Viscous Beam,能够向患者肘关节的 屈/伸运动提供黏性阻抗).如图3所示,该装置能 E.Rocon等341开发了一种基于生物力加载方 法的可穿戴型手臂震颤抑制装置—WOTAS.如图 够减弱震颤幅度并且体积足够小,能够穿套在衬衫 5所示,该装置是一种三自由度的外骨骼机器人系 的袖子中.Viscous Beam允许整个拇指和手指运动、 统,包括3个无刷直流电机系统、外骨骼系统以及惯 肘关节屈/伸运动和前臂的旋内/外运动.该装置通 性传感器系统等.另外,E.Rocon等提出了2种控制 过一个约束层阻尼系统(constrained-layer-damping, 策略:一种是通过增加患者手臂弹性、阻尼和质量特 CLD)向患者手臂提供阻尼,值得关注的是该装置能 征来抑制震颤;另外一种是利用震颤的近似重复特 够通过一个小弯曲半径抑制大旋转性,其自身的扰