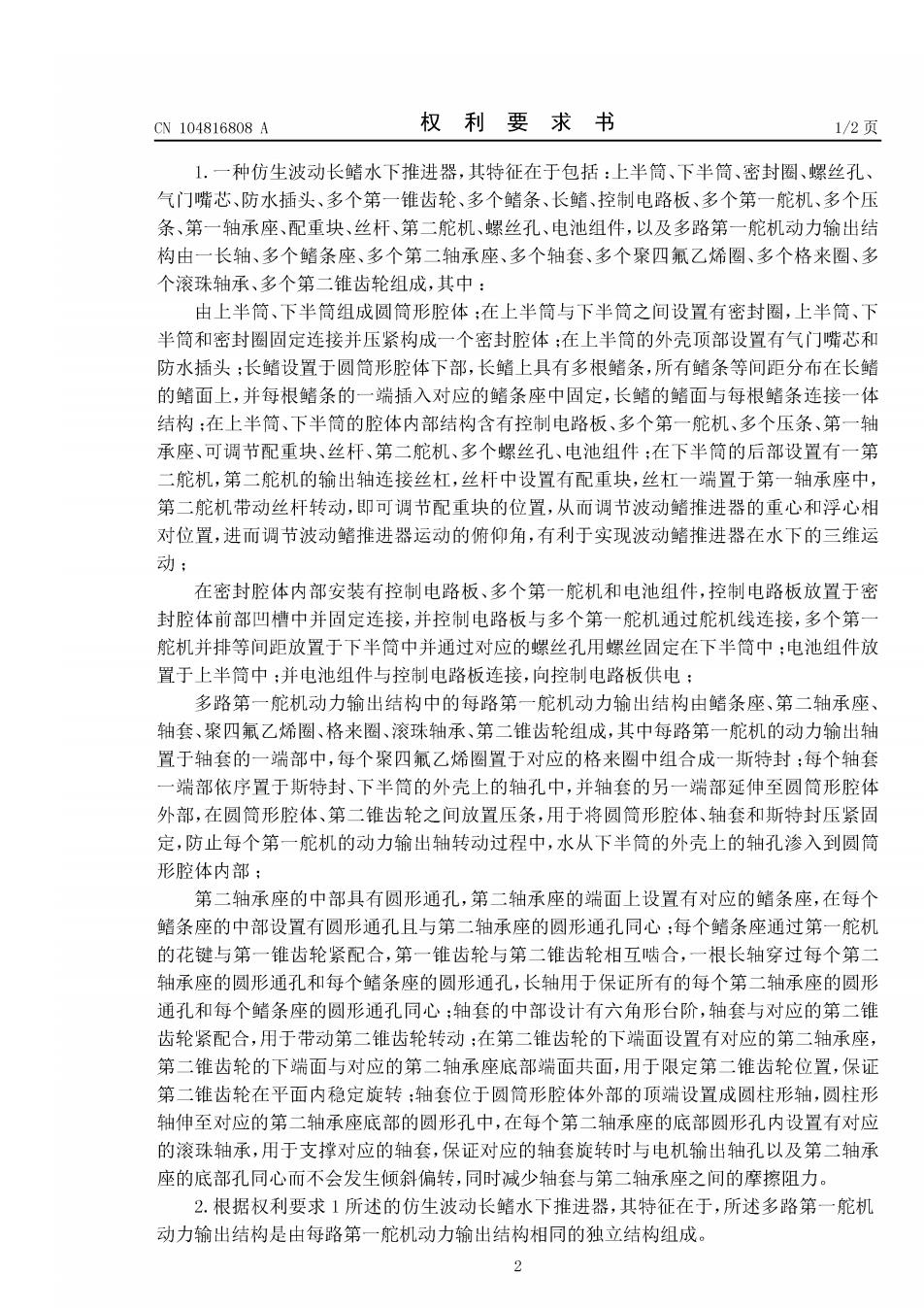
(19)中华人民共和国国家知识产权局 ▣ (12)发明专利申请 (10)申请公布号CN104816808A (43)申请公布日2015.08.05 (21)申请号201510271823.2 (22)申请日2015.05.25 (71)申请人中国科学院自动化研究所 地址100190北京市海淀区中关村东路95 号 (72)发明人王硕王睿谭民 (74)专利代理机构中科专利商标代理有限责任 公司11021 代理人宋焰琴 (51)nt.Cl. B63H1/36(2006.01) B63H23/12(2006.01) 权利要求书2页说明书5页附图5页 (54)发明名称 种仿生波动长鳍水下推进器 (57)摘要 5 本发明涉及一种仿生波动长鳍水下推进器包 括:上下半筒、密封圈、螺丝孔、气门嘴芯、防水插 头、第一锥齿轮、多个鳍条、长鳍、控制电路板、第 一、第二舵机、压条、第一轴承座、配重块、丝杆、螺 2 丝孔、电池组件,以及多路第一舵机动力输出结构 由一长轴、鳍条座、第二轴承座、轴套、聚四氟乙烯 圈、格来圈、滚珠轴承、第二锥齿轮组成:上半筒、 下半筒和密封圈连接并压紧构成一个密封腔体, 长鳍设置于圆筒形腔体下部,长鳍上具有多根鳍 条,所有鳍条等间距分布在长鳍的鳍面上。每根鳍 条通过第一锥齿轮、第二锥齿轮连接一个第一舵 机单独驱动,长鳍鳍面是乳胶材料的柔性薄膜做 成,能在鳍条带动下实现多种正弦或其他类型的 波形并与水作用产生稳定的推进力。 87997050 石
CN104816808A 权利要求书 1/2页 1.一种仿生波动长鳍水下推进器,其特征在于包括:上半筒、下半筒、密封圈、螺丝孔、 气门嘴芯、防水插头、多个第一锥齿轮、多个鳍条、长鳍、控制电路板、多个第一舵机、多个压 条、第一轴承座、配重块、丝杆、第二舵机、螺丝孔、电池组件,以及多路第一舵机动力输出结 构由一长轴、多个鳍条座、多个第二轴承座、多个轴套、多个聚四氟乙烯圈、多个格来圈、多 个滚珠轴承、多个第二锥齿轮组成,其中: 由上半筒、下半筒组成圆筒形腔体:在上半筒与下半筒之间设置有密封圈,上半筒、下 半筒和密封圈固定连接并压紧构成一个密封腔体;在上半筒的外壳顶部设置有气门嘴芯和 防水插头;长鳍设置于圆筒形腔体下部,长鳍上具有多根鳍条,所有鳍条等间距分布在长鳍 的鳍面上,并每根鳍条的一端插入对应的鳍条座中固定,长鳍的鳍面与每根鳍条连接一体 结构:在上半筒、下半筒的腔体内部结构含有控制电路板、多个第一舵机、多个压条、第一轴 承座、可调节配重块、丝杆、第二舵机、多个螺丝孔、电池组件:在下半筒的后部设置有一第 二舵机,第二舵机的输出轴连接丝杠,丝杆中设置有配重块,丝杠一端置于第一轴承座中, 第二舵机带动丝杆转动,即可调节配重块的位置,从而调节波动鳍推进器的重心和浮心相 对位置,进而调节波动鳍推进器运动的俯仰角,有利于实现波动鳍推进器在水下的三维运 动: 在密封腔体内部安装有控制电路板、多个第一舵机和电池组件,控制电路板放置于密 封腔体前部凹槽中并固定连接,并控制电路板与多个第一舵机通过舵机线连接,多个第一 舵机并排等间距放置于下半筒中并通过对应的螺丝孔用螺丝固定在下半筒中:电池组件放 置于上半筒中:并电池组件与控制电路板连接,向控制电路板供电: 多路第一舵机动力输出结构中的每路第一舵机动力输出结构由鳍条座、第二轴承座、 轴套、聚四氟乙烯圈、格来圈、滚珠轴承、第二锥齿轮组成,其中每路第一舵机的动力输出轴 置于轴套的一端部中,每个聚四氟乙烯圈置于对应的格来圈中组合成一斯特封:每个轴套 一端部依序置于斯特封、下半筒的外壳上的轴孔中,并轴套的另一端部延伸至圆筒形腔体 外部,在圆筒形腔体、第二锥齿轮之间放置压条,用于将圆筒形腔体、轴套和斯特封压紧固 定,防止每个第一舵机的动力输出轴转动过程中,水从下半筒的外壳上的轴孔渗入到圆筒 形腔体内部; 第二轴承座的中部具有圆形通孔,第二轴承座的端面上设置有对应的鳍条座,在每个 鳍条座的中部设置有圆形通孔且与第二轴承座的圆形通孔同心:每个鳍条座通过第一舵机 的花键与第一锥齿轮紧配合,第一锥齿轮与第二锥齿轮相互啮合,一根长轴穿过每个第二 轴承座的圆形通孔和每个鳍条座的圆形通孔,长轴用于保证所有的每个第二轴承座的圆形 通孔和每个鳍条座的圆形通孔同心:轴套的中部设计有六角形台阶,轴套与对应的第二锥 齿轮紧配合,用于带动第二锥齿轮转动;在第二锥齿轮的下端面设置有对应的第二轴承座, 第二锥齿轮的下端面与对应的第二轴承座底部端面共面,用于限定第二锥齿轮位置,保证 第二锥齿轮在平面内稳定旋转:轴套位于圆筒形腔体外部的顶端设置成圆柱形轴,圆柱形 轴伸至对应的第二轴承座底部的圆形孔中,在每个第二轴承座的底部圆形孔内设置有对应 的滚珠轴承,用于支撑对应的轴套,保证对应的轴套旋转时与电机输出轴孔以及第二轴承 座的底部孔同心而不会发生倾斜偏转,同时减少轴套与第二轴承座之间的摩擦阻力 2.根据权利要求1所述的仿生波动长鳍水下推进器,其特征在于,所述多路第一舵机 动力输出结构是由每路第一舵机动力输出结构相同的独立结构组成。 2
CN104816808A 权利要求书 2/2页 3.根据权利要求1所述的仿生波动长鳍水下推进器,其特征在于,所述上半筒、下半筒 是由铝合金材料制成圆筒形腔体结构,用于在减轻自重基础上保持较高的强度,抵抗深水 压力,减少前进方向的运动阻力。 4.根据权利要求1所述的仿生波动长鳍水下推进器,其特征在于,所述密封圈是由软 硅胶材料制成:密封圈、上半筒和下半筒通过均匀分布在圆筒形腔体的外壳上的螺丝孔用 内六角螺丝连接。 5.根据权利要求1所述的仿生波动长鳍水下推进器,其特征在于,所述气门嘴芯为轮 胎气门嘴芯,用于向圆筒形腔体充放气,并维持圆筒形腔体充气后的密封,使圆筒形腔体内 外部压力一致,用于避免波动鳍推进器在深水中因水压力过大而损坏外壳。 6.根据权利要求1所述的仿生波动长鳍水下推进器,其特征在于,所述防水插头通过 线缆连接电池组件和控制电路板,将电池组件的充电线和控制电路板的串口线缆引出,当 波动鳍推进器内电池组件耗尽后,可通过防水插头将电池组件的充电线连接到外部电源上 给电池组件充电,控制电路板的串口线缆连接至控制计算机上,控制计算机向控制电路板 发送控制命令:控制计算机只需向控制电路板的发送串口命令即让波动鳍推进器带动水下 机器平台运动。 7.根据权利要求1所述的仿生波动长鳍水下推进器,其特征在于,所述电池组件以四 个作为一组并联放置,共六组电池,每组电池之间为串联连接。 8.根据权利要求1所述的仿生波动长鳍水下推进器,其特征在于,所述鳍条是由多根 碳纤维材料制成,每根鳍条都通过第一锥齿轮、第二锥齿轮连接一个第一舵机单独驱动,将 第一舵机输出动力转化为鳍条摆动动力,以设定的幅值和频率周期性摆动。 9.根据权利要求1所述的仿生波动长鳍水下推进器,其特征在于,所述长鳍的鳍面是 乳胶材料的柔性薄膜做成,能在鳍条带动下实现多种正弦或其他类型的波形并与水作用产 生稳定的推进力。 10.根据权利要求1所述的仿生波动长鳍水下推进器,其特征在于,所述第一舵机和第 二舵机采用数字舵机。 3

CN104816808A 说明书 1/5页 一种仿生波动长鳍水下推进器 技术领域 [0001]本发明属于仿生机器鱼技术领域,涉及一种仿生波动长鳍水下推进器,尤其涉及 一种模仿长刀鱼游动方式的仿生波动长鳍水下推进器。 背景技术 [0002]近年来,自主水下航行器(AUVs)己被广泛应用于海洋开发、海洋研究、水下环境 保护等领域。螺旋桨等传统的水下推进器会在尾迹中会产生大量大带宽的噪声,导致一些 水下生态系统遭到严重破坏,并且还具有效率低,机动性差等缺点。而鱼类经过长时间的演 化,进化出了各种高效、高机动的推进方式。模拟鱼类推进方式,研发高性能、高机动性、对 环境扰动小的智能仿生水下机器人引起了越来越多研究人员的兴趣。 [0003]根据鱼类游动时身体产生推力部位的不同,可以将鱼类游动模式分为身体/尾鳍 模式(Body and/,or Caudal Fin,BCF)和中央鳍/对鳍模式(Median and/or Paired Fin, MPP),采用MPF模式游动的鱼类通常依靠波动的长鳍产生推力来进行游动,相比BCP模式的 鱼类,它们在低速、复杂环境下往往具有更好的机动性和稳定性。 [0004] 据现有文献,最早进行仿MP℉模式鱼类实验研究的是英国赫瑞瓦特大学,他们于 2001年设计了一种长鳍驱动装置,其中包含8个并行排列的的鳍条,鳍条通过柔性薄膜形 成一条长鳍,并通过气动装置驱动鳍条实现长鳍的波动,并可通过改变行波方向来改变推 力方向,但由于气动驱动器体积和惯性较大,难以投入实际应用。经过多年的研究发展,国 内外研究人员逐渐研制出了多种MP℉模式的仿生机器鱼系统。在国外,美国西北大学在研 究电鳗游动机理的基础上开发了一种长腹鳍波动推进装置:新加坡南洋理工大学在深入研 究长鳍波动推进机理的基础上,研制了相应的长鳍波动推进系统。在国内,国防科技大学率 先开展了仿生波动长鳍推进器的研究,并研制了多种仿生波动鳍推进实验装置。 [0005]上述长鳍推进装置能实现前进、后退运动,但游动速度较慢,因结构限制,难以实 现水下快速三维运动,且可扩展性不强,对研制新型水下推进器的指导作用有限。中科院自 动化所曾模仿鳐鱼研制了一种靠胸鳍波动推进的仿生机器鱼,其能实现前进、后退、上升、 下潜等多模态运动,但因为其长鳍上舵机和鳍条数量较少,鳍面上最多只能实现1个正弦 波形的波动,机器鱼所能进行的运动种类受到限制。 发明内容 [0006]针对现有技术中存在的以上问题,基于模块化思想,设计了一种即可在水中独立 地模拟刀鱼进行快速稳定三维运动,又可安装在水下机器平台两侧模拟鳐鱼运动的仿生波 动长鳍水下推进器。 [0007]为实现上述目的,本发明一种仿生波动长鳍水下推进器,采取以下技术方案包括: 上半筒、下半筒、密封圈、螺丝孔、气门嘴芯、防水插头、多个第一锥齿轮、多个鳍条、长鳍、控 制电路板、多个第一舵机、多个压条、第一轴承座、配重块、丝杆、第二舵机、螺丝孔、电池组 件,以及多路第一舵机动力输出结构由一长轴、多个鳍条座、多个第二轴承座、多个轴套、多 4

CN104816808A 说明 书 2/5页 个聚四氟乙烯圈、多个格来圈、多个滚珠轴承、多个第二锥齿轮组成,其中: [0008]由上半筒、下半筒组成圆筒形腔体:在上半筒与下半筒之间设置有密封圈,上半 筒、下半筒和密封圈固定连接并压紧构成一个密封腔体:在上半筒的外壳顶部设置有气门 嘴芯和防水插头:长鳍设置于圆筒形腔体下部,长鳍上具有多根鳍条,所有鳍条等间距分布 在长鳍的鳍面上,并每根鳍条的一端插入对应的鳍条座中固定,长鳍的鳍面与每根鳍条连 接一体结构;在上半筒、下半筒的腔体内部结构含有控制电路板、多个第一舵机、多个压条、 第一轴承座、可调节配重块、丝杆、第二舵机、多个螺丝孔、电池组件:在下半筒的后部设置 有一第二舵机,第二舵机的输出轴连接丝杠,丝杆中设置有配重块,丝杠一端置于第一轴承 座中,第二舵机带动丝杆转动,即可调节配重块的位置,从而调节波动鳍推进器的重心和浮 心相对位置,进而调节波动鳍推进器运动的俯仰角,有利于实现波动鳍推进器在水下的三 维运动:在密封腔体内部安装有控制电路板、多个第一舵机和电池组件,控制电路板放置于 密封腔体前部凹槽中并固定连接,并控制电路板与多个第一舵机通过舵机线连接,多个第 一舵机并排等间距放置于下半筒中并通过对应的螺丝孔用螺丝固定在下半筒中:电池组件 放置于上半筒中;并电池组件与控制电路板连接,向控制电路板供电:多路第一舵机动力 输出结构中的每路第一舵机动力输出结构由鳍条座、第二轴承座、轴套、聚四氟乙烯圈、格 来圈、滚珠轴承、第二锥齿轮组成,其中每路第一舵机的动力输出轴置于轴套的一端部中, 每个聚四氟乙烯圈置于对应的格来圈中组合成一斯特封:每个轴套一端部依序置于斯特 封、下半筒的外壳上的轴孔中,并轴套的另一端部延伸至圆筒形腔体外部,在圆筒形腔体、 第二锥齿轮之间放置压条,用于将圆筒形腔体、轴套和斯特封压紧固定,防止每个第一舵机 的动力输出轴转动过程中,水从下半筒的外壳上的轴孔渗入到圆筒形腔体内部;第二轴承 座的中部具有圆形通孔,第二轴承座的端面上设置有对应的鳍条座,在每个鳍条座的中部 设置有圆形通孔且与第二轴承座的圆形通孔同心:每个鳍条座通过第一舵机的花键与第一 锥齿轮紧配合,第一锥齿轮与第二锥齿轮相互啮合,一根长轴穿过每个第二轴承座的圆形 通孔和每个鳍条座的圆形通孔,长轴用于保证所有的每个第二轴承座的圆形通孔和每个鳍 条座的圆形通孔同心:轴套的中部设计有六角形台阶,轴套与对应的第二锥齿轮紧配合,用 于带动第二锥齿轮转动;在第二锥齿轮的下端面设置有对应的第二轴承座,第二锥齿轮的 下端面与对应的第二轴承座底部端面共面,用于限定第二锥齿轮位置,保证第二锥齿轮在 平面内稳定旋转:轴套位于圆筒形腔体外部的顶端设置成圆柱形轴,圆柱形轴伸至对应的 第二轴承座底部的圆形孔中,在每个第二轴承座的底部圆形孔内设置有对应的滚珠轴承, 用于支撑对应的轴套,保证对应的轴套旋转时与电机输出轴孔以及第二轴承座的底部孔同 心而不会发生倾斜偏转,同时减少轴套与第二轴承座之间的摩擦阻力。 [0009] 本发明由于采用了以上技术方案,与现有水下推进器相比,具有以下优点: [0010] 1、本发明的仿生波动长鳍水下推进器主体呈圆筒形,且两端呈半球形,可有效减 小推进器在水下三维空间中游动的阻力,提高推进器的能量利用效率; [0011]2、本发明的仿生波动长鳍水下推进器圆筒形腔体顶端设有防水电缆接头,可增强 机器鱼充电、通讯连接的便利性,且不影响机器鱼的密封性能; [0012]3、本发明的仿生波动长鳍水下推进器的动力源全部安装在推进器主体腔内,通过 动力输出轴和锥齿轮将舵机的转动运动转换为鳍条的摆动运动,进而驱动仿生波动长鳍水 下推进器的长鳍运动:本发明采用数字舵机驱动方式,便于控制,各个数字舵机紧密排列, 5