为,取图形上任意一点B,与对称中心C连线,再由对称中心C向相反方向延伸等距离,必然找到对应点B1。一个具有对称中心的图形,其中心相对的两侧的晶面和晶棱都表现为反向平行,如图4-7,C为对称中心,AABD与AA,BD为反向平行。晶体中若存在对称中心,其晶面必是两两反向平行且相等的:反过来说,若晶体上晶面两两反向平行且相等,则晶体必然存在对称中心。b图4-7由对称中心联系起来的两个反向平行的图4-6具有对称中心(C)的图形A与AlI、B与B:为对应点三角形(a)和平行四边形(b)4.旋转反伸轴(L")旋转反伸轴是通过晶体中心的一根假想的直线,图形绕此直线旋转一定角度后,再对此直线上的一个点进行反伸,可使相同部分重复。相应的对称操作为绕此直线的旋转和对此直线上一点反伸的复合操作。在这里,旋转和反伸是对称变换的两个不可分割的动作,无论是先旋转后反伸,还是先反伸后旋转,效果是相同的。但必须是两个动作连续完成以后才能使晶体还原。旋转反伸轴用L"表示,i意为反伸,n为轴次。n可为1、2、3、4、6:α为基转角,n=360α。同理,晶体中不可能出现五次及高于六次的旋转反伸轴。L1:相应的对称操作是旋转360°加反伸。因为图形旋转360°等于没有旋转,所以对称变换相当于没有旋转而单纯反伸,与对称中心的单独作用等效。如图4-8(a),点1反伸与点2重合,所以L=C,即L与C等效。L2:相应的对称操作为旋转180°加反伸。如图4-8(b),点1围绕L转180°以后,再凭借L上的一点反伸与点2重合。但由图可看出,借助于工L的P的反映,也同样可使1与2重合。因此,L?=P,即L?与跟它垂直的对称面P等效。L:对称操作为旋转120°加反伸。如图4-8(c),点1旋转120°后反伸可以得到点2:点2旋转120°后反伸可以得到点3:点3旋转120°后反伸可以得到点4:点4旋转120°后反伸可以得到点5:点5旋转120°后反伸可以得到点6。这样,由一个原始的点经过L的作用,可依次获得1、2、3、4、5、6共六个点。现在如果用L+C44
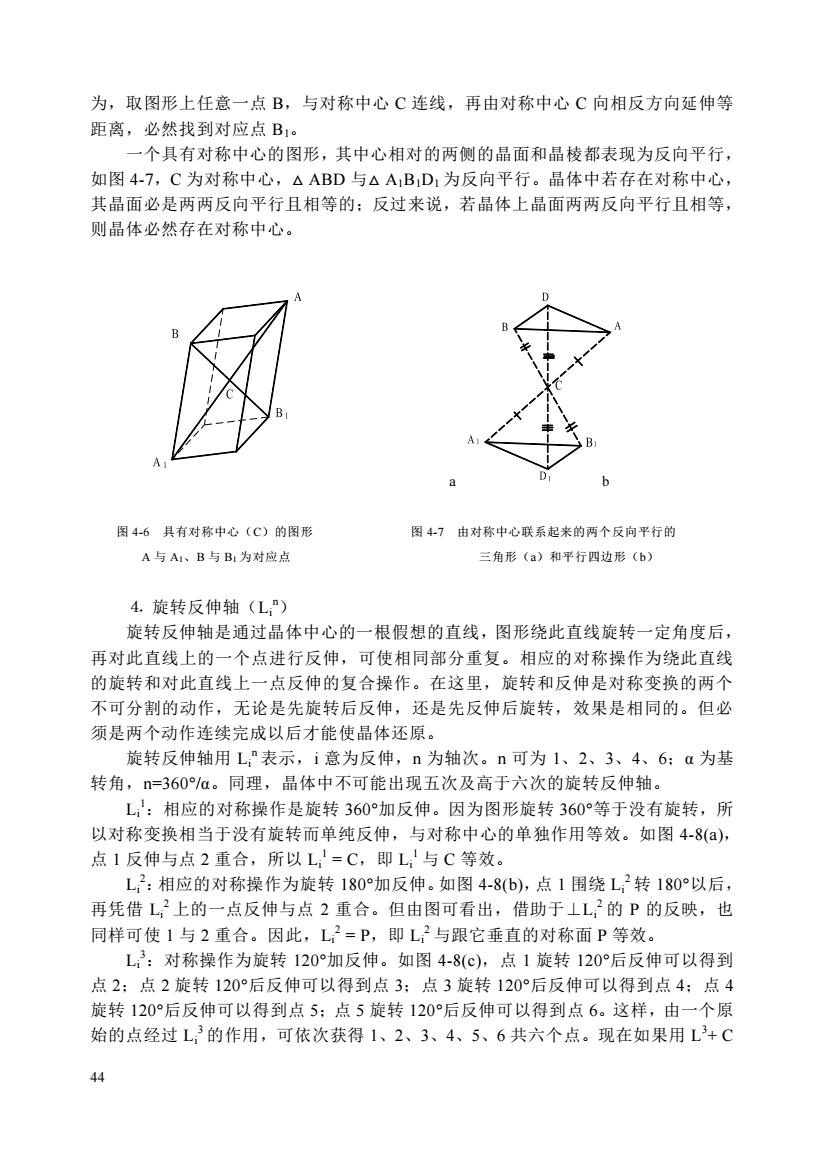
44 为,取图形上任意一点 B,与对称中心 C 连线,再由对称中心 C 向相反方向延伸等 距离,必然找到对应点 B1。 一个具有对称中心的图形,其中心相对的两侧的晶面和晶棱都表现为反向平行, 如图 4-7,C 为对称中心,△ ABD 与△ A1B1D1 为反向平行。晶体中若存在对称中心, 其晶面必是两两反向平行且相等的;反过来说,若晶体上晶面两两反向平行且相等, 则晶体必然存在对称中心。 a b 图 4-6 具有对称中心(C)的图形 图 4-7 由对称中心联系起来的两个反向平行的 A 与 A1、B 与 B1 为对应点 三角形(a)和平行四边形(b) ⒋ 旋转反伸轴(Li n) 旋转反伸轴是通过晶体中心的一根假想的直线,图形绕此直线旋转一定角度后, 再对此直线上的一个点进行反伸,可使相同部分重复。相应的对称操作为绕此直线 的旋转和对此直线上一点反伸的复合操作。在这里,旋转和反伸是对称变换的两个 不可分割的动作,无论是先旋转后反伸,还是先反伸后旋转,效果是相同的。但必 须是两个动作连续完成以后才能使晶体还原。 旋转反伸轴用 Li n 表示,i 意为反伸,n 为轴次。n 可为 1、2、3、4、6;α 为基 转角,n=360°/α。同理,晶体中不可能出现五次及高于六次的旋转反伸轴。 Li 1:相应的对称操作是旋转 360°加反伸。因为图形旋转 360°等于没有旋转,所 以对称变换相当于没有旋转而单纯反伸,与对称中心的单独作用等效。如图 4-8(a), 点 1 反伸与点 2 重合,所以 Li 1 = C,即 Li 1 与 C 等效。 Li 2:相应的对称操作为旋转 180°加反伸。如图 4-8(b),点 1 围绕 Li 2 转 180°以后, 再凭借 Li 2 上的一点反伸与点 2 重合。但由图可看出,借助于⊥Li 2 的 P 的反映,也 同样可使 1 与 2 重合。因此,Li 2 = P,即 Li 2 与跟它垂直的对称面 P 等效。 Li 3:对称操作为旋转 120°加反伸。如图 4-8(c),点 1 旋转 120°后反伸可以得到 点 2;点 2 旋转 120°后反伸可以得到点 3;点 3 旋转 120°后反伸可以得到点 4;点 4 旋转 120°后反伸可以得到点 5;点 5 旋转 120°后反伸可以得到点 6。这样,由一个原 始的点经过 Li 3 的作用,可依次获得 1、2、3、4、5、6 共六个点。现在如果用 L 3 + C

代替L3,则由点1开始经L3的作用可得点1、3、5三个点,再通过C的作用又获得点2、4、6三个点,总共六个点。与L3所导出的结果完全相同。因此,L=L3+C。L4:相应的对称操作为转90°后反伸。如图4-8(d),点1旋转90°反伸可以得到点2:点2旋转90°反伸可以得到点3:点3旋转90°反伸可以得到点4。这样,通过L4的作用,可依次获得1、2、3、4四个点。L4是一个独立的复合对称要素,它的作用无法由其他对称要素或它们的组合来代替。L§:对称操作为旋转60°后反伸。如图4-8(e),从点1开始,旋转60°后反伸得点2,依次类推,通过L°的作用依次获得1、2、3、4、5、6六个点。若用L+P代替L,则由点1开始,经L3作用可得1、3、5三个点,再通过垂直于L的P的作用又可获得2、4、6三个点,总共六个点,与L‘导出的完全相同。因此,L‘=L3+P(PIL)。一bdac图4-8旋转反伸轴及对称操作示意图综上所述,除L之外,其他所有旋转反伸轴都可以用其他简单对称要素或它们的组合来代替。其关系归纳如下L=C, L2=P, L3=L3+C, L6=L+P1。一般常用的旋转反伸轴为L4和L。L肯定是必需的,它不能用其他对称要素代替。L‘和L3+PI等效,由于L‘在晶体分类中的特殊意义,故采用L代替L+P1的组合。除L4和L‘之外,其他旋转反伸轴均用等效的简单对称要素或其组合代替。四次旋转反伸轴L对称操作为绕此直线旋转90°和对于其上一点进行反伸的复合。图4-9是一个具有L的晶体及其极射赤平投影图。图4-9a表示晶体起始位置的位象。当绕L4旋转90°,到达图4-9b所示的过渡位象时,晶体显然尚未复原;只有再通过L上的一点进行反伸之后才会使晶体复原。图c中的实线和虚线,分别代表45
45 代替 Li 3,则由点 1 开始经 L 3 的作用可得点 1、3、5 三个点,再通过 C 的作用又获 得点 2、4、6 三个点,总共六个点。与 Li 3 所导出的结果完全相同。因此,Li 3 = L3 +C。 Li 4:相应的对称操作为转 90°后反伸。如图 4-8(d),点 1 旋转 90°反伸可以得到 点 2;点 2 旋转 90°反伸可以得到点 3;点 3 旋转 90°反伸可以得到点 4。这样,通过 Li 4 的作用,可依次获得 1、2、3、4 四个点。 Li 4 是一个独立的复合对称要素,它的作用无法由其他对称要素或它们的组合来 代替。 Li 6:对称操作为旋转 60°后反伸。如图 4-8(e),从点 1 开始,旋转 60°后反伸得 点 2,依次类推,通过 Li 6 的作用依次获得 1、2、3、4、5、6 六个点。若用 L 3 + P 代 替 Li 6,则由点 1 开始,经 L 3 作用可得 1、3、5 三个点,再通过垂直于 L 3 的 P 的作 用又可获得 2、4、6 三个点,总共六个点,与 Li 6 导出的完全相同。因此,Li 6 = L3 + P (P⊥L 3)。 a b c d e 图 4-8 旋转反伸轴及对称操作示意图 综上所述,除 Li 4 之外,其他所有旋转反伸轴都可以用其他简单对称要素或它们 的组合来代替。其关系归纳如下 Li 1 = C,Li 2 = P,Li 3 = L3 + C,Li 6 = L3 +P⊥。 一般常用的旋转反伸轴为 Li 4 和 Li 6。Li 4 肯定是必需的,它不能用其他对称要素 代替。Li 6 和 L 3 + P⊥等效,由于 Li 6 在晶体分类中的特殊意义,故采用 Li 6 代替 L 3 +P⊥ 的组合。除 Li 4 和 Li 6 之外,其他旋转反伸轴均用等效的简单对称要素或其组合代替。 四次旋转反伸轴 Li 4 ,对称操作为绕此直线旋转 90°和对于其上一点进行反伸的复 合。图 4-9 是一个具有 Li 4 的晶体及其极射赤平投影图。图 4-9a 表示晶体起始位置的 位象。当绕 Li 4 旋转 90°,到达图 4-9b 所示的过渡位象时,晶体显然尚未复原;只有 再通过 Li 4 上的一点进行反伸之后才会使晶体复原。图 c 中的实线和虚线,分别代表