
哈尔滨工业大学工学硕士学位论文 重心投影法和静态稳定边界法可以用于静态稳定的判定[26]。1968年 McGhee和Frank提出重心投影法,将机器人足底与地面的若干接触点连成凸 多边形,定义为支撑多边形区域,通过对支撑区域的确定和形状来表达机器人 的稳定性区域的方法。静态边界法也是以这种多边形支撑区域为依据进行多足 机器人运动稳定性的判断。根据重心的位置,可以将重心距离各边界的水平距 离作为稳定裕度来衡量机器人的稳定性能。静态稳定边界法与重心投影法相 比,优点是能够用于不平整的地面,将重心投影法中的可能倾斜的支撑区域改 为在水平面上的投影多边形,相当于把崎岖不平路面上的运动行为投影到了水 平面上,就能在与该基于几何的方法相适应的地形上进行稳定性的判断。由 此。后来在上述两种方法思想的基础上,又发展出了纵向稳定边界法2],偏 转纵向稳定边界法28]和躯干纵向稳定边界法[2。 能量稳定边界法考虑了机器人的质量分布和由此带来的势能对机器人稳定 性的影响。1985年,Messuri提出能量稳定边界法,它基于机器人倾覆所需最 小势能的稳定性判断方法30]。这种方法计算机器人翻倒所需要提供的最小势 能,即造成机器人沿某边界翻转的最小外界能量,这种势能的计算是按沿任意 侧边翻倒时重心位置的变化来进行的。 在静态问题基础上,发展出了动态的运动问题,即运动过程中并不是所有 腿均着地的阶段,这需要用动态稳定性的判断方法。MIT的Raibert和他的同 事在研究机器人的跑步运动时,揭示了基本控制定律4)。南斯拉夫学者 Miomir Vukobratovic提出了用来描述拟人机器人运动稳定性的零力矩点 ZMP(Zero Moment Point)法B。所谓ZMP点是指在支撑面上,接触点处的地 面作用力对该点的力矩在支撑面上的投影为零,若ZMP点在这个支撑多边形 的内部,则运动将是稳定的。大部分双足机器人运动控制都是基于ZMP方法 的,该方法比较符合人类行走时的控制过程,因此ZMP方法作为动态稳定性 判断方法是一种重要的控制方法。在对四足爬行机器人运动稳定性的研究中, Kang等人在Orin提出的压力中心法(Center of Pressure,CoP)32]基础上,经 过科学的分析,重新命名并提出了有效质量中心方法(Effective Mass Center, EMC)3别]。这种方法相当于将双足机器人ZMP方法扩展到了四足机器人上。 在腿式机器人发生倾覆时,身体沿着一边的腿所构成的轴线翻转,因此可 以根据在这种情况下,分析仍然在地面支撑并且作为轴线的腿的受力情况,这 些力与其绕质心产生的力矩在倾覆过程中作用,如果其效果能够抵消翻转的趋 势,则能够保持机器人的运动稳定。这种思想与静态稳定性控制中,假设翻转 时分析影响倾覆的因素的方法类似,通过从不同的角度研究造成翻转的因素, -8
哈尔滨工业大学工学硕士学位论文 - 8 - 重心投影法和静态稳定边界法可以用于静态稳定的判定[ 26 ]。1968 年 McGhee 和 Frank 提出重心投影法,将机器人足底与地面的若干接触点连成凸 多边形,定义为支撑多边形区域,通过对支撑区域的确定和形状来表达机器人 的稳定性区域的方法。静态边界法也是以这种多边形支撑区域为依据进行多足 机器人运动稳定性的判断。根据重心的位置,可以将重心距离各边界的水平距 离作为稳定裕度来衡量机器人的稳定性能。静态稳定边界法与重心投影法相 比,优点是能够用于不平整的地面,将重心投影法中的可能倾斜的支撑区域改 为在水平面上的投影多边形,相当于把崎岖不平路面上的运动行为投影到了水 平面上,就能在与该基于几何的方法相适应的地形上进行稳定性的判断。由 此。后来在上述两种方法思想的基础上,又发展出了纵向稳定边界法[27],偏 转纵向稳定边界法[28]和躯干纵向稳定边界法[29]。 能量稳定边界法考虑了机器人的质量分布和由此带来的势能对机器人稳定 性的影响。1985 年,Messuri 提出能量稳定边界法,它基于机器人倾覆所需最 小势能的稳定性判断方法[30]。这种方法计算机器人翻倒所需要提供的最小势 能,即造成机器人沿某边界翻转的最小外界能量,这种势能的计算是按沿任意 侧边翻倒时重心位置的变化来进行的。 在静态问题基础上,发展出了动态的运动问题,即运动过程中并不是所有 腿均着地的阶段,这需要用动态稳定性的判断方法。MIT 的 Raibert 和他的同 事在研究机器人的跑步运动时,揭示了 基本控制定律[4]。南斯拉夫学者 Miomir Vukobratović 提出了用来描述拟人机器人运动稳定性的零力矩点 ZMP(Zero Moment Point)法[31]。所谓 ZMP 点是指在支撑面上,接触点处的地 面作用力对该点的力矩在支撑面上的投影为零,若 ZMP 点在这个支撑多边形 的内部,则运动将是稳定的。大部分双足机器人运动控制都是基于 ZMP 方法 的,该方法比较符合人类行走时的控制过程,因此 ZMP 方法作为动态稳定性 判断方法是一种重要的控制方法。在对四足爬行机器人运动稳定性的研究中, Kang 等人在 Orin 提出的压力中心法 (Center of Pressure,CoP)[32]基础上,经 过科学的分析,重新命名并提出了有效质量中心方法 (Effective Mass Center, EMC)[33]。这种方法相当于将双足机器人 ZMP 方法扩展到了四足机器人上。 在腿式机器人发生倾覆时,身体沿着一边的腿所构成的轴线翻转,因此可 以根据在这种情况下,分析仍然在地面支撑并且作为轴线的腿的受力情况,这 些力与其绕质心产生的力矩在倾覆过程中作用,如果其效果能够抵消翻转的趋 势,则能够保持机器人的运动稳定。这种思想与静态稳定性控制中,假设翻转 时分析影响倾覆的因素的方法类似,通过从不同的角度研究造成翻转的因素
哈尔滨工业大学工学硕士学位论文 把握了静态和动态稳定性判断的核心。在这种思想下,Yoneda和Hirose于 1997年提出了倾倒稳定判别法(Tumble stability Judgment,.TSJ)B4。 1.3.2机器人稳定性研究现状 随着仿生机器人研究的逐渐深入,运动稳定性的研究也渐渐成为机器人运 动的核心问题之一。机器人稳定性的研究多集中于足式机器人,以四足和双足 的稳定性研究最为广泛。当前研究多以线性系统为主,进行行走步态或连续跳 跃步态的研究,而对非线性冲击间歇式运动研究较少。近年来随着现在控制理 论的发展,非基于运动模型的稳定性研究方法也越来越多。 MIT的Raibert教授和他的同事们在研究跳跃机器人时,提出了基本的控 制定律,并出书专门做了论述,他们所研制的机器人是由液压驱动的,并且做 了著名的跑步实验,其动态运动控制主要依靠在地面阶段调整液压缸的输出来 控制跳跃高度和姿态。前文提到的弓形单足跳跃机构Bow-Leg,与Raibert的 不同,该机构是在腾空阶段通过调整弓形腿的变形量来实现调控的。而 Ahmadi和Buehler利用相同的控制规律,设计出了一种能量利用率更高的弹 簧机构单腿跑步机器人B。 双足拟人行走机器人的稳定性稳定一度是公认的难题,但是现在己经有许 多机构研制出了能够行走的拟人双足机器人。在这一方面,日本本田公司的研 究取得了瞩目的成就,他们于1997年研究开发的P3型拟人机器人B6以及进 一步发展在2002制造出的性能和人类相近的A$MO3刃机器人,成功实现了 与人类相同的动步态稳定运动。它在运动腾空阶段利用身体关节的运动和身体 物理特性来控制平衡,能够通过倾斜身体调整重心来实现自身运动的稳定性。 在国内,北方工业大学的熊小琴、何广平等人在国外弹簧倒立摆模型的基 础上,发现该模型没有考虑到动物关节腿的作用而且大部分腿式机器人质心不 在支撑腿的轴线上,这与模型不相符。因此他们提出了带有关节腿、尾巴、躯 干的模型,其中的尾巴有驱动器,能起到平衡作用B8)。 北京航空航天大学的杨文纲和陆震将DH方法引入了跳跃机器人的稳定 性研究,该机构是利用倒立摆运动产生离心作用而跳跃的。通过对其关节机构 的摆动的调节来进行控制,利用DH方法进行机器人姿态的推导,然后结合 投影法等方法给出控制量来进行稳定的运动控制3。 仿生机器人的稳定性研究多作为课题的辅助工作展开,并未形成完整的稳 定性分析和判别体系,各大学和研究机构以现有的稳定性判据为基础,在特定 机器人上加以应用。 -9
哈尔滨工业大学工学硕士学位论文 - 9 - 把握了静态和动态稳定性判断的核心。在这种思想下,Yoneda 和 Hirose 于 1997 年提出了倾倒稳定判别法(Tumble stability Judgment,TSJ)[34]。 1.3.2 机器人稳定性研究现状 随着仿生机器人研究的逐渐深入,运动稳定性的研究也渐渐成为机器人运 动的核心问题之一。机器人稳定性的研究多集中于足式机器人,以四足和双足 的稳定性研究最为广泛。当前研究多以线性系统为主,进行行走步态或连续跳 跃步态的研究,而对非线性冲击间歇式运动研究较少。近年来随着现在控制理 论的发展,非基于运动模型的稳定性研究方法也越来越多。 MIT 的 Raibert 教授和他的同事们在研究跳跃机器人时,提出了基本的控 制定律,并出书专门做了论述,他们所研制的机器人是由液压驱动的,并且做 了著名的跑步实验,其动态运动控制主要依靠在地面阶段调整液压缸的输出来 控制跳跃高度和姿态。前文提到的弓形单足跳跃机构 Bow-Leg,与 Raibert 的 不同,该机构是在腾空阶段通过调整弓形腿的变形量来实现调控的。而 Ahmadi 和 Buehler 利用相同的控制规律,设计出了一种能量利用率更高的弹 簧机构单腿跑步机器人[35]。 双足拟人行走机器人的稳定性稳定一度是公认的难题,但是现在已经有许 多机构研制出了能够行走的拟人双足机器人。在这一方面,日本本田公司的研 究取得了瞩目的成就,他们于 1997 年研究开发的 P3 型拟人机器人[36]以及进 一步发展在 2002 制造出的性能和人类相近的 ASIMO[37]机器人,成功实现了 与人类相同的动步态稳定运动。它在运动腾空阶段利用身体关节的运动和身体 物理特性来控制平衡,能够通过倾斜身体调整重心来实现自身运动的稳定性。 在国内,北方工业大学的熊小琴、何广平等人在国外弹簧倒立摆模型的基 础上,发现该模型没有考虑到动物关节腿的作用而且大部分腿式机器人质心不 在支撑腿的轴线上,这与模型不相符。因此他们提出了带有关节腿、尾巴、躯 干的模型,其中的尾巴有驱动器,能起到平衡作用[38]。 北京航空航天大学的杨文纲和陆震将 D-H 方法引入了跳跃机器人的稳定 性研究,该机构是利用倒立摆运动产生离心作用而跳跃的。通过对其关节机构 的摆动的调节来进行控制,利用 D-H 方法进行机器人姿态的推导,然后结合 投影法等方法给出控制量来进行稳定的运动控制[39]。 仿生机器人的稳定性研究多作为课题的辅助工作展开,并未形成完整的稳 定性分析和判别体系,各大学和研究机构以现有的稳定性判据为基础,在特定 机器人上加以应用
哈尔滨工业大学工学硕士学位论文 1.4主要研究内容 本课题组对仿青蛙跳跃机器人己进行了部分研究工作。经过青蛙运动机理 的分析,提取了跳跃的关键信息,抽象出跳跃模型,对模型进行了运动学和动 力学的研究并研制了仿青蛙跳跃机器人。本文针对仿青蛙机器人进行了研究和 改进,对运动特性和关键参数进行分析,结合现有研究方法进行跳跃稳定性研 究,完善控制系统并进行实验。具体研究内容如下: (1)分析已有的仿青蛙跳跃机器人样机,总结机器人机构和性能方面的 不足,提出改进方案。针对机器人稳定跳跃姿态感知和实验记录的需要,建立 用于跳跃机器人的传感器系统。 (2)结合机器人感知环境和自身姿态的能力,研究跳跃过程中关键运动 参数的获取方法,从姿态角度、运动角度、四肢末端位置和运动轨迹几个方面 对参数获取方法进行探讨。 (3)根据机器人的运动学模型,选取适当的稳定性判断方法进行跳跃稳 定性的理论研究。从起跳、腾空、着陆的过程详细分析关键参数对跳跃稳定性 的影响,给出稳定判据,并通过仿真进行验证,最后对全跳跃过程进行综合。 (4)改进和完善控制系统,进行系统硬件补充和软件设计,构建通信系 统和实验平台,在不同初始条件和环境因素下进行实验,观察机器人跳跃情 况,对稳定跳跃的理论研究进行验证。 -10-
哈尔滨工业大学工学硕士学位论文 - 10 - 1.4 主要研究内容 本课题组对仿青蛙跳跃机器人已进行了部分研究工作。经过青蛙运动机理 的分析,提取了跳跃的关键信息,抽象出跳跃模型,对模型进行了运动学和动 力学的研究并研制了仿青蛙跳跃机器人。本文针对仿青蛙机器人进行了研究和 改进,对运动特性和关键参数进行分析,结合现有研究方法进行跳跃稳定性研 究,完善控制系统并进行实验。具体研究内容如下: (1) 分析已有的仿青蛙跳跃机器人样机,总结机器人机构和性能方面的 不足,提出改进方案。针对机器人稳定跳跃姿态感知和实验记录的需要,建立 用于跳跃机器人的传感器系统。 (2) 结合机器人感知环境和自身姿态的能力,研究跳跃过程中关键运动 参数的获取方法,从姿态角度、运动角度、四肢末端位置和运动轨迹几个方面 对参数获取方法进行探讨。 (3) 根据机器人的运动学模型,选取适当的稳定性判断方法进行跳跃稳 定性的理论研究。从起跳、腾空、着陆的过程详细分析关键参数对跳跃稳定性 的影响,给出稳定判据,并通过仿真进行验证,最后对全跳跃过程进行综合。 (4) 改进和完善控制系统,进行系统硬件补充和软件设计,构建通信系 统和实验平台,在不同初始条件和环境因素下进行实验,观察机器人跳跃情 况,对稳定跳跃的理论研究进行验证
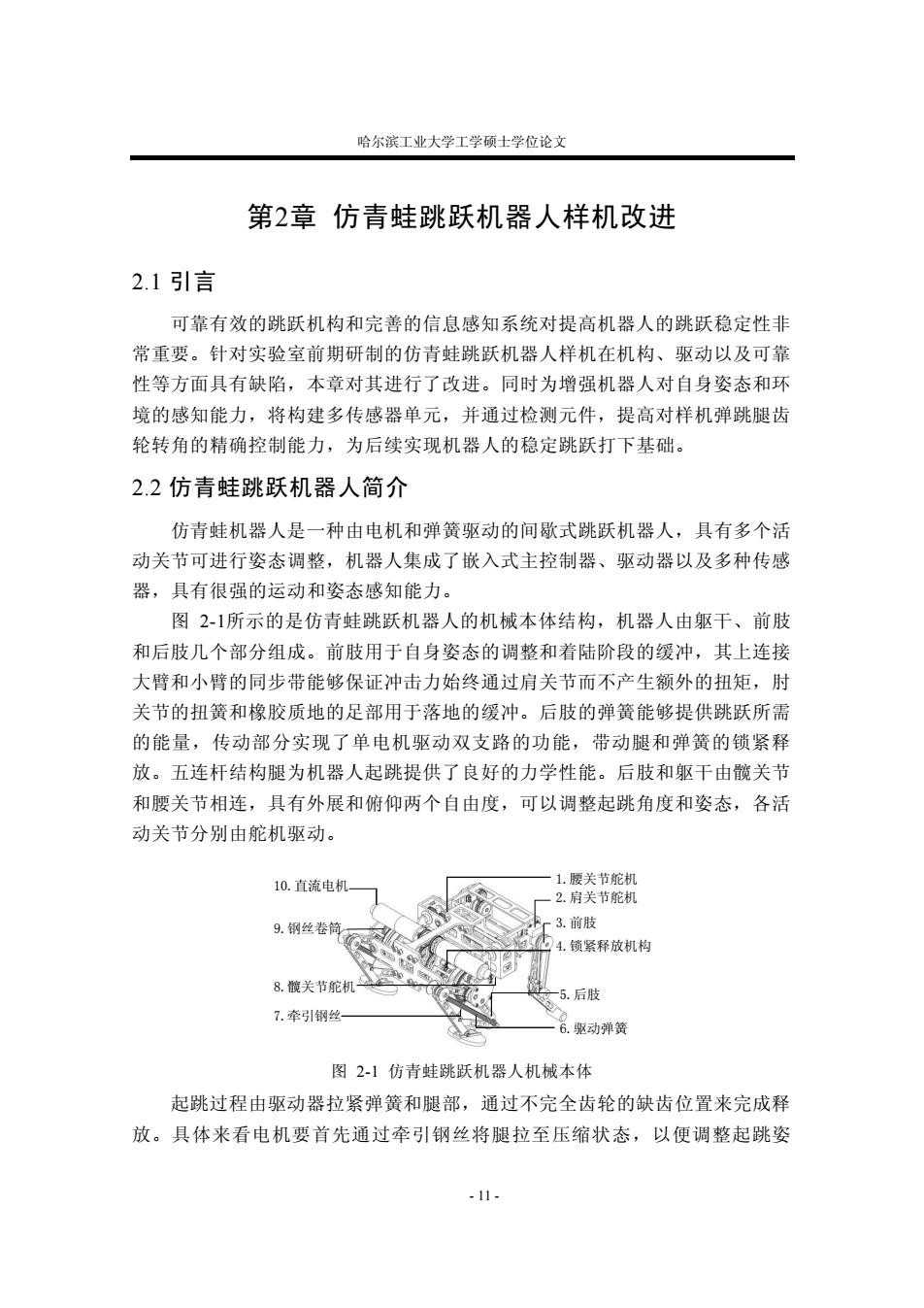
哈尔滨工业大学工学硕士学位论文 第2章仿青蛙跳跃机器人样机改进 2.1引言 可靠有效的跳跃机构和完善的信息感知系统对提高机器人的跳跃稳定性非 常重要。针对实验室前期研制的仿青蛙跳跃机器人样机在机构、驱动以及可靠 性等方面具有缺陷,本章对其进行了改进。同时为增强机器人对自身姿态和环 境的感知能力,将构建多传感器单元,并通过检测元件,提高对样机弹跳腿齿 轮转角的精确控制能力,为后续实现机器人的稳定跳跃打下基础。 2.2仿青蛙跳跃机器人简介 仿青蛙机器人是一种由电机和弹簧驱动的间歇式跳跃机器人,具有多个活 动关节可进行姿态调整,机器人集成了嵌入式主控制器、驱动器以及多种传感 器,具有很强的运动和姿态感知能力。 图2-1所示的是仿青蛙跳跃机器人的机械本体结构,机器人由躯干、前肢 和后肢几个部分组成。前肢用于自身姿态的调整和着陆阶段的缓冲,其上连接 大臂和小臂的同步带能够保证冲击力始终通过肩关节而不产生额外的扭矩,肘 关节的扭簧和橡胶质地的足部用于落地的缓冲。后肢的弹簧能够提供跳跃所需 的能量,传动部分实现了单电机驱动双支路的功能,带动腿和弹簧的锁紧释 放。五连杆结构腿为机器人起跳提供了良好的力学性能。后肢和躯干由髋关节 和腰关节相连,具有外展和俯仰两个自由度,可以调整起跳角度和姿态,各活 动关节分别由舵机驱动。 10.直流电机 -1.腰关节舵机 2.肩关节舵机 9.钢丝卷筒 ,3.前肢 4.锁紧释放机构 8.髋关节舵机 5.后肢 7.牵引钢丝 6.驱动弹簧 图2-1仿青蛙跳跃机器人机械本体 起跳过程由驱动器拉紧弹簧和腿部,通过不完全齿轮的缺齿位置来完成释 放。具体来看电机要首先通过牵引钢丝将腿拉至压缩状态,以便调整起跳姿 -11-
哈尔滨工业大学工学硕士学位论文 - 11 - 第2章 仿青蛙跳跃机器人样机改进 2.1 引言 可靠有效的跳跃机构和完善的信息感知系统对提高机器人的跳跃稳定性非 常重要。针对实验室前期研制的仿青蛙跳跃机器人样机在机构、驱动以及可靠 性等方面具有缺陷,本章对其进行了改进。同时为增强机器人对自身姿态和环 境的感知能力,将构建多传感器单元,并通过检测元件,提高对样机弹跳腿齿 轮转角的精确控制能力,为后续实现机器人的稳定跳跃打下基础。 2.2 仿青蛙跳跃机器人简介 仿青蛙机器人是一种由电机和弹簧驱动的间歇式跳跃机器人,具有多个活 动关节可进行姿态调整,机器人集成了嵌入式主控制器、驱动器以及多种传感 器,具有很强的运动和姿态感知能力。 图 2-1所示的是仿青蛙跳跃机器人的机械本体结构,机器人由躯干、前肢 和后肢几个部分组成。前肢用于自身姿态的调整和着陆阶段的缓冲,其上连接 大臂和小臂的同步带能够保证冲击力始终通过肩关节而不产生额外的扭矩,肘 关节的扭簧和橡胶质地的足部用于落地的缓冲。后肢的弹簧能够提供跳跃所需 的能量,传动部分实现了单电机驱动双支路的功能,带动腿和弹簧的锁紧释 放。五连杆结构腿为机器人起跳提供了良好的力学性能。后肢和躯干由髋关节 和腰关节相连,具有外展和俯仰两个自由度,可以调整起跳角度和姿态,各活 动关节分别由舵机驱动。 1.腰关节舵机 2.肩关节舵机 3.前肢 4.锁紧释放机构 5.后肢 6.驱动弹簧 7.牵引钢丝 8.髋关节舵机 9.钢丝卷筒 10.直流电机 图 2-1 仿青蛙跳跃机器人机械本体 起跳过程由驱动器拉紧弹簧和腿部,通过不完全齿轮的缺齿位置来完成释 放。具体来看电机要首先通过牵引钢丝将腿拉至压缩状态,以便调整起跳姿
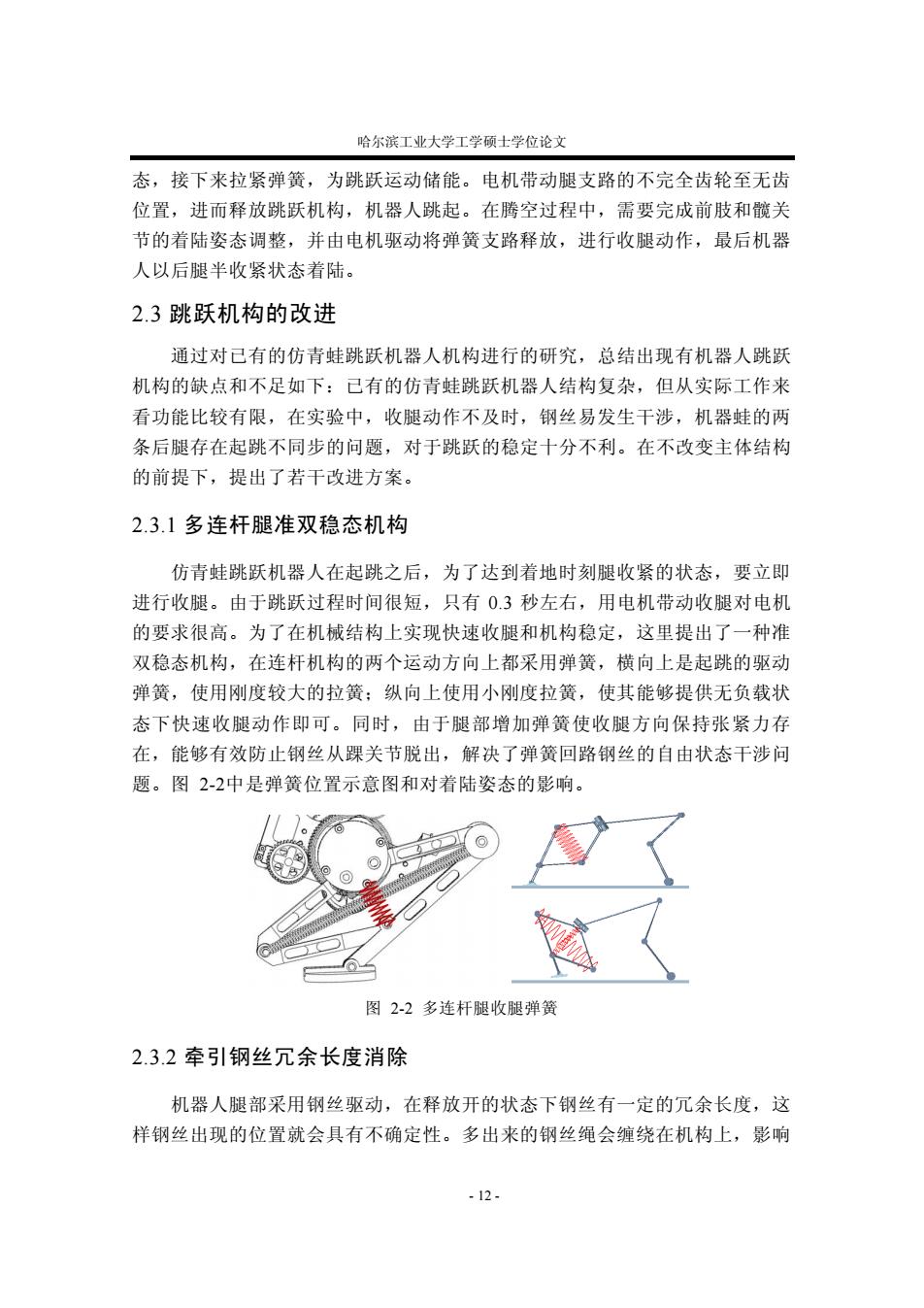
哈尔滨工业大学工学硕士学位论文 态,接下来拉紧弹簧,为跳跃运动储能。电机带动腿支路的不完全齿轮至无齿 位置,进而释放跳跃机构,机器人跳起。在腾空过程中,需要完成前肢和髋关 节的着陆姿态调整,并由电机驱动将弹簧支路释放,进行收腿动作,最后机器 人以后腿半收紧状态着陆。 2.3跳跃机构的改进 通过对己有的仿青蛙跳跃机器人机构进行的研究,总结出现有机器人跳跃 机构的缺点和不足如下:已有的仿青蛙跳跃机器人结构复杂,但从实际工作来 看功能比较有限,在实验中,收腿动作不及时,钢丝易发生干涉,机器蛙的两 条后腿存在起跳不同步的问题,对于跳跃的稳定十分不利。在不改变主体结构 的前提下,提出了若干改进方案。 2.3.1多连杆腿准双稳态机构 仿青蛙跳跃机器人在起跳之后,为了达到着地时刻腿收紧的状态,要立即 进行收腿。由于跳跃过程时间很短,只有03秒左右,用电机带动收腿对电机 的要求很高。为了在机械结构上实现快速收腿和机构稳定,这里提出了一种准 双稳态机构,在连杆机构的两个运动方向上都采用弹簧,横向上是起跳的驱动 弹簧,使用刚度较大的拉簧:纵向上使用小刚度拉簧,使其能够提供无负载状 态下快速收腿动作即可。同时,由于腿部增加弹簧使收腿方向保持张紧力存 在,能够有效防止钢丝从踝关节脱出,解决了弹簧回路钢丝的自由状态干涉问 题。图2-2中是弹簧位置示意图和对着陆姿态的影响。 图2-2多连杆腿收腿弹簧 2.3.2牵引钢丝冗余长度消除 机器人腿部采用钢丝驱动,在释放开的状态下钢丝有一定的冗余长度,这 样钢丝出现的位置就会具有不确定性。多出来的钢丝绳会缠绕在机构上,影响 -12-
哈尔滨工业大学工学硕士学位论文 - 12 - 态,接下来拉紧弹簧,为跳跃运动储能。电机带动腿支路的不完全齿轮至无齿 位置,进而释放跳跃机构,机器人跳起。在腾空过程中,需要完成前肢和髋关 节的着陆姿态调整,并由电机驱动将弹簧支路释放,进行收腿动作,最后机器 人以后腿半收紧状态着陆。 2.3 跳跃机构的改进 通过对已有的仿青蛙跳跃机器人机构进行的研究,总结出现有机器人跳跃 机构的缺点和不足如下:已有的仿青蛙跳跃机器人结构复杂,但从实际工作来 看功能比较有限,在实验中,收腿动作不及时,钢丝易发生干涉,机器蛙的两 条后腿存在起跳不同步的问题,对于跳跃的稳定十分不利。在不改变主体结构 的前提下,提出了若干改进方案。 2.3.1 多连杆腿准双稳态机构 仿青蛙跳跃机器人在起跳之后,为了达到着地时刻腿收紧的状态,要立即 进行收腿。由于跳跃过程时间很短,只有 0.3 秒左右,用电机带动收腿对电机 的要求很高。为了在机械结构上实现快速收腿和机构稳定,这里提出了一种准 双稳态机构,在连杆机构的两个运动方向上都采用弹簧,横向上是起跳的驱动 弹簧,使用刚度较大的拉簧;纵向上使用小刚度拉簧,使其能够提供无负载状 态下快速收腿动作即可。同时,由于腿部增加弹簧使收腿方向保持张紧力存 在,能够有效防止钢丝从踝关节脱出,解决了弹簧回路钢丝的自由状态干涉问 题。图 2-2中是弹簧位置示意图和对着陆姿态的影响。 图 2-2 多连杆腿收腿弹簧 2.3.2 牵引钢丝冗余长度消除 机器人腿部采用钢丝驱动,在释放开的状态下钢丝有一定的冗余长度,这 样钢丝出现的位置就会具有不确定性。多出来的钢丝绳会缠绕在机构上,影响