
哈尔滨工业大学工学硕士学位论文 卡内基梅隆大学与瑞士联邦技术学院联合研制的Bow-Lg单足跳跃机器 人具有一只柔性的弹跳足,在收缩状态下呈弓形,内部的电机带动绳索驱动腿 部压缩,起跳时内部机构释放绳索,弹性腿由弯复直的过程中释放能量,驱动 机器人弹起。在着地阶段时,在冲击状态下压缩的腿部有储存了弹性能,机构 简单而能量利用率高。第一代和第二代分别实现了二维平面和三维平面的稳定 跳跃刀。 图1-3MT四足跳跃机 图1-4三维Bow Leg机器人 美国航空局(NASA)的喷气推进实验室(JPL)先后研制了三代间歇式跳跃式 机器人用于太空探索8),都采用了弹簧驱动的机械方案。其中第二代跳跃机器 人模仿青蛙的运动方式,设计了单足蛙形弹跳机,如图1-5所示。在压缩状态 下其尺寸约为30cm×30cm×30cm,机器人自重1.3kg,能够跳跃80cm高度, 远度1.8m,跌倒后能够靠侧翼自主立起恢复起跳状态,它仅由一台电机驱动 完成收缩,调整释放,落地跌倒爬起的过程,运动过程设计巧妙,并具有很高 的能量利用率[8,鬥。由于这种蛙形跳跃机器人存在不能调整起跳角和平坦地面 移动性不好的缺陷,NASA又推出了其第三代跳跃机器人,如图1-6所示。这 种弹跳机针对上述缺陷,加入了调整起跳角度的机构和轮子,提高了机器人平 坦地面的运动能力和调节性能1, 图1-5NASA的第二代弹跳机 图1-6NASA的第三代弹跳机 -3
哈尔滨工业大学工学硕士学位论文 - 3 - 卡内基梅隆大学与瑞士联邦技术学院联合研制的 Bow-Leg 单足跳跃机器 人具有一只柔性的弹跳足,在收缩状态下呈弓形,内部的电机带动绳索驱动腿 部压缩,起跳时内部机构释放绳索,弹性腿由弯复直的过程中释放能量,驱动 机器人弹起。在着地阶段时,在冲击状态下压缩的腿部有储存了弹性能,机构 简单而能量利用率高。第一代和第二代分别实现了二维平面和三维平面的稳定 跳跃[7]。 图 1-3 MIT 四足跳跃机 图 1-4 三维 Bow Leg 机器人 美国航空局(NASA)的喷气推进实验室(JPL)先后研制了三代间歇式跳跃式 机器人用于太空探索[8],都采用了弹簧驱动的机械方案。其中第二代跳跃机器 人模仿青蛙的运动方式,设计了单足蛙形弹跳机,如图 1-5所示。在压缩状态 下其尺寸约为 30cm×30cm×30cm,机器人自重 1.3kg,能够跳跃 80cm 高度, 远度 1.8m,跌倒后能够靠侧翼自主立起恢复起跳状态,它仅由一台电机驱动 完成收缩,调整释放,落地跌倒爬起的过程,运动过程设计巧妙,并具有很高 的能量利用率 [8,9]。由于这种蛙形跳跃机器人存在不能调整起跳角和平坦地面 移动性不好的缺陷,NASA 又推出了其第三代跳跃机器人,如图 1-6所示。这 种弹跳机针对上述缺陷,加入了调整起跳角度的机构和轮子,提高了机器人平 坦地面的运动能力和调节性能[10]。 图 1-5 NASA 的第二代弹跳机 图 1-6 NASA 的第三代弹跳机

哈尔滨工业大学工学硕士学位论文 仿生跳跃机器人向着微小化的方向发展。Miko等人设计的迷你机器人只 有6.98g重,5cm高,通过凸轮机构驱动,能够跳到27倍于自身高度山。 MT Lucca Institute研制的Grillo机器昆虫电机功率只有0.3W,通过储能和释 放,在起跳时功率可达5W,起跳速度达到每秒30倍体长2。微小型跳跃机 器人的性能与重量比值更大。 图1-77g迷你机器人 图1-8 Grillo机器昆虫 随着相关技术的发展,通过各种各样的驱动和释放方式,许多双足和四足 机器人都具备了跳跃的能力,结合运动的灵活性和多样性,毫不逊色于专门的 跳跃机器人。 日本东京大学研制的机器狗KenKen,是模仿狗类腿部腱的工作原理研制 的连续性跳跃式机器人],如图1-9所示。机器人用弹簧来模拟动物腿部的腱 连接,在弹簧触地时可以减小冲击并进行储能用于下次跳跃,提高能量利用效 率。KenKen完成了平滑地面的连续稳定跳跃步态。 美国斯坦福大学和俄亥俄州大学通过研究各种动物奔跑的运动步态和动力 学特性,模仿动物腿部弹性储能方式,合作研制了一种低摩擦损耗的高速奔跑 机器人KOLT4,如图1-10所示。这种四足机器人其每条腿髋关节有2个自 由度,膝关节有1个柔性自由度,机构宽27cm,长2m,重量70kg,最高速 度达到7m/s。 波士顿动力公司在MT腿实验室等组织的研究基础上开发出先进的四足 机器人BgD0g。它用于户外载重的任务,具有静态和动态的移动性能和完善 的集成传感器系统。BigDog大约1米高,1米长,0.3米宽,重约90kg。动力 由内燃机驱动的液压系统提供,带动液压缸驱动的四肢和关节运动。陀螺仪等 姿态传感器获得姿态信息,计算机来规划步态运动。他能够攀越35度的斜 坡,小跑步态达到1.8m/s,在石头地面步行可达0.7m/s,能够负重50kg严酷 地形工作)。 、4
哈尔滨工业大学工学硕士学位论文 - 4 - 仿生跳跃机器人向着微小化的方向发展。Mirko 等人设计的迷你机器人只 有 6.98g 重,5cm 高,通过凸轮机构驱动,能够跳到 27 倍于自身高度[11]。 IMT Lucca Institute 研制的 Grillo 机器昆虫电机功率只有 0.3W,通过储能和释 放,在起跳时功率可达 5W,起跳速度达到每秒 30 倍体长[12]。微小型跳跃机 器人的性能与重量比值更大。 图 1-7 7g 迷你机器人 图 1-8 Grillo 机器昆虫 随着相关技术的发展,通过各种各样的驱动和释放方式,许多双足和四足 机器人都具备了跳跃的能力,结合运动的灵活性和多样性,毫不逊色于专门的 跳跃机器人。 日本东京大学研制的机器狗 KenKen,是模仿狗类腿部腱的工作原理研制 的连续性跳跃式机器人[13],如图 1-9所示。机器人用弹簧来模拟动物腿部的腱 连接,在弹簧触地时可以减小冲击并进行储能用于下次跳跃,提高能量利用效 率。KenKen 完成了平滑地面的连续稳定跳跃步态。 美国斯坦福大学和俄亥俄州大学通过研究各种动物奔跑的运动步态和动力 学特性,模仿动物腿部弹性储能方式,合作研制了一种低摩擦损耗的高速奔跑 机器人 KOLT[14],如图 1-10所示。这种四足机器人其每条腿髋关节有 2 个自 由度,膝关节有 1 个柔性自由度,机构宽 27cm,长 2m,重量 70kg,最高速 度达到 7m/s。 波士顿动力公司在 MIT 腿实验室等组织的研究基础上开发出先进的四足 机器人 BigDog。它用于户外载重的任务,具有静态和动态的移动性能和完善 的集成传感器系统。BigDog 大约 1 米高,1 米长,0.3 米宽,重约 90kg。动力 由内燃机驱动的液压系统提供,带动液压缸驱动的四肢和关节运动。陀螺仪等 姿态传感器获得姿态信息,计算机来规划步态运动。他能够攀越 35 度的斜 坡,小跑步态达到 1.8m/s,在石头地面步行可达 0.7m/s,能够负重 50kg 严酷 地形工作[15]
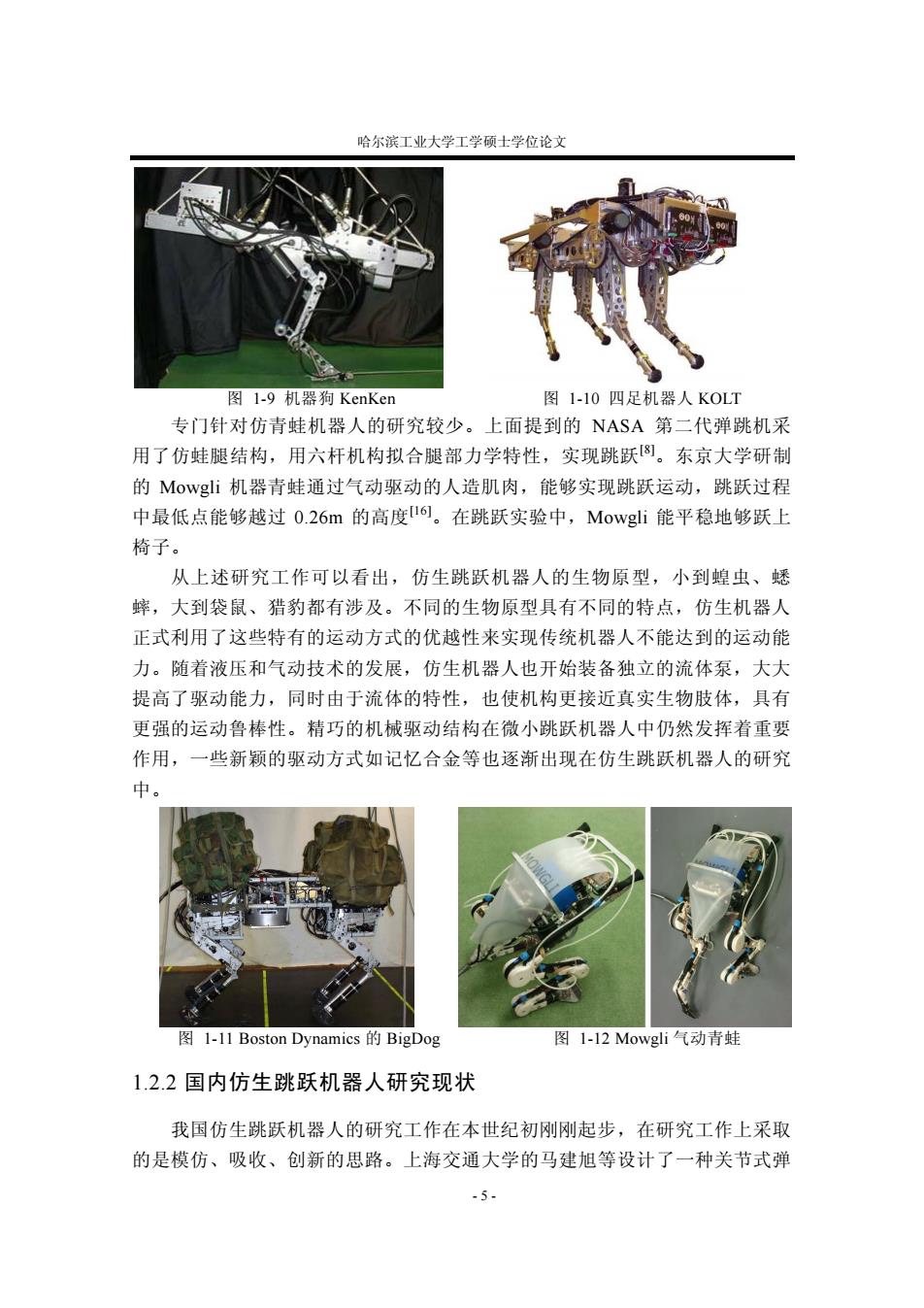
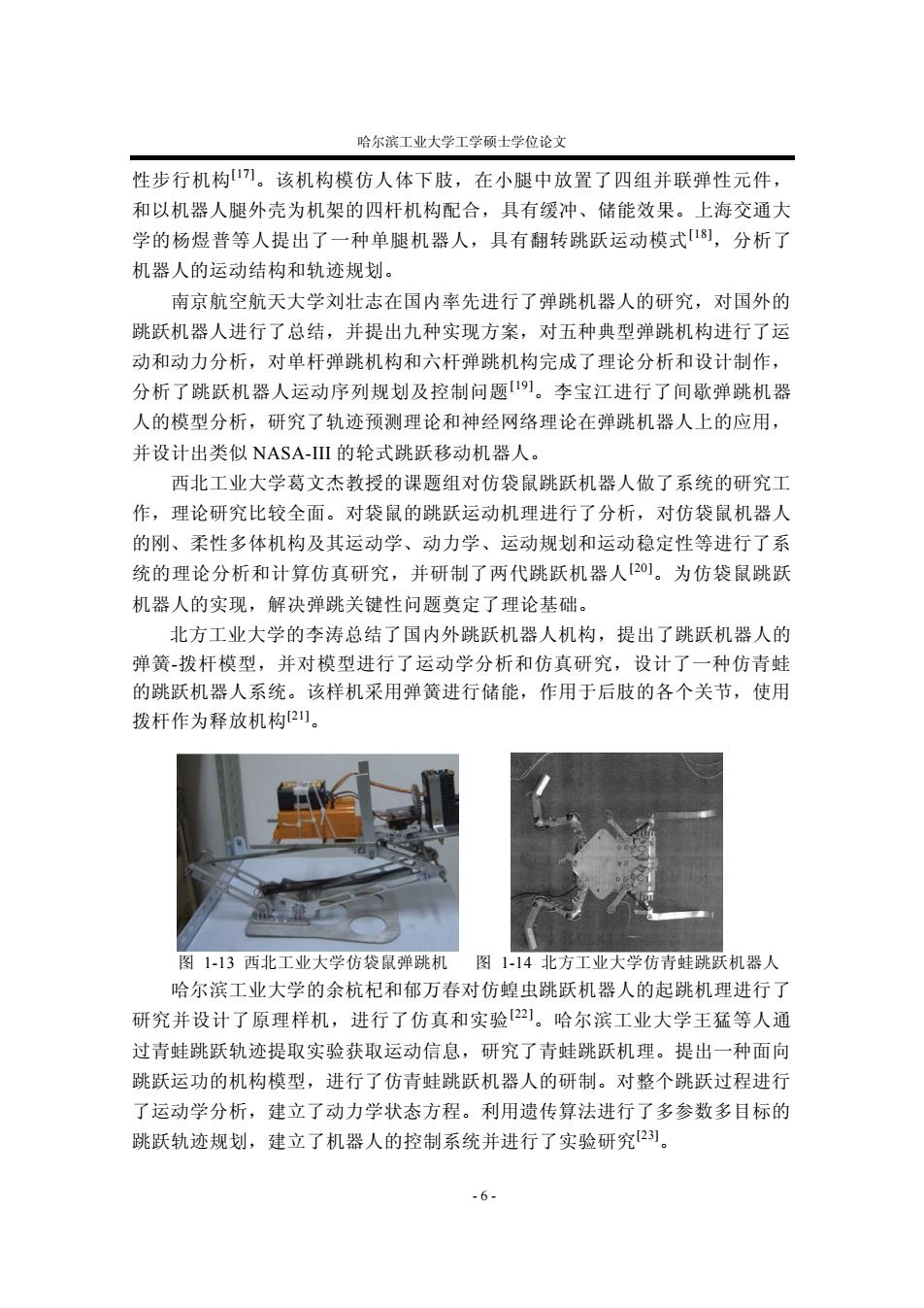
哈尔滨工业大学工学硕士学位论文 图l-9机器狗KenKen 图1-10四足机器人KOLT 专门针对仿青蛙机器人的研究较少。上面提到的NASA第二代弹跳机采 用了仿蛙腿结构,用六杆机构拟合腿部力学特性,实现跳跃)。东京大学研制 的Mowgli机器青蛙通过气动驱动的人造肌肉,能够实现跳跃运动,跳跃过程 中最低点能够越过0.26m的高度16。在跳跃实验中,Mowgli能平稳地够跃上 椅子。 从上述研究工作可以看出,仿生跳跃机器人的生物原型,小到蝗虫、蟋 蟀,大到袋鼠、猎豹都有涉及。不同的生物原型具有不同的特点,仿生机器人 正式利用了这些特有的运动方式的优越性来实现传统机器人不能达到的运动能 力。随着液压和气动技术的发展,仿生机器人也开始装备独立的流体泵,大大 提高了驱动能力,同时由于流体的特性,也使机构更接近真实生物肢体,具有 更强的运动鲁棒性。精巧的机械驱动结构在微小跳跃机器人中仍然发挥着重要 作用,一些新颖的驱动方式如记忆合金等也逐渐出现在仿生跳跃机器人的研究 中。 图1-11 Boston Dynamics的BigDog 图1-12 Mowgli气动青蛙 1.2.2国内仿生跳跃机器人研究现状 我国仿生跳跃机器人的研究工作在本世纪初刚刚起步,在研究工作上采取 的是模仿、吸收、创新的思路。上海交通大学的马建旭等设计了一种关节式弹 -5
哈尔滨工业大学工学硕士学位论文 - 5 - 图 1-9 机器狗 KenKen 图 1-10 四足机器人 KOLT 专门针对仿青蛙机器人的研究较少。上面提到的 NASA 第二代弹跳机采 用了仿蛙腿结构,用六杆机构拟合腿部力学特性,实现跳跃[8]。东京大学研制 的 Mowgli 机器青蛙通过气动驱动的人造肌肉,能够实现跳跃运动,跳跃过程 中最低点能够越过 0.26m 的高度[16]。在跳跃实验中,Mowgli 能平稳地够跃上 椅子。 从上述研究工作可以看出,仿生跳跃机器人的生物原型,小到蝗虫、蟋 蟀,大到袋鼠、猎豹都有涉及。不同的生物原型具有不同的特点,仿生机器人 正式利用了这些特有的运动方式的优越性来实现传统机器人不能达到的运动能 力。随着液压和气动技术的发展,仿生机器人也开始装备独立的流体泵,大大 提高了驱动能力,同时由于流体的特性,也使机构更接近真实生物肢体,具有 更强的运动鲁棒性。精巧的机械驱动结构在微小跳跃机器人中仍然发挥着重要 作用,一些新颖的驱动方式如记忆合金等也逐渐出现在仿生跳跃机器人的研究 中。 图 1-11 Boston Dynamics 的 BigDog 图 1-12 Mowgli 气动青蛙 1.2.2 国内仿生跳跃机器人研究现状 我国仿生跳跃机器人的研究工作在本世纪初刚刚起步,在研究工作上采取 的是模仿、吸收、创新的思路。上海交通大学的马建旭等设计了一种关节式弹
哈尔滨工业大学工学硕士学位论文 性步行机构7。该机构模仿人体下肢,在小腿中放置了四组并联弹性元件, 和以机器人腿外壳为机架的四杆机构配合,具有缓冲、储能效果。上海交通大 学的杨煜普等人提出了一种单腿机器人,具有翻转跳跃运动模式8),分析了 机器人的运动结构和轨迹规划。 南京航空航天大学刘壮志在国内率先进行了弹跳机器人的研究,对国外的 跳跃机器人进行了总结,并提出九种实现方案,对五种典型弹跳机构进行了运 动和动力分析,对单杆弹跳机构和六杆弹跳机构完成了理论分析和设计制作, 分析了跳跃机器人运动序列规划及控制问题。李宝江进行了间歇弹跳机器 人的模型分析,研究了轨迹预测理论和神经网络理论在弹跳机器人上的应用, 并设计出类似NASA-II的轮式跳跃移动机器人。 西北工业大学葛文杰教授的课题组对仿袋鼠跳跃机器人做了系统的研究工 作,理论研究比较全面。对袋鼠的跳跃运动机理进行了分析,对仿袋鼠机器人 的刚、柔性多体机构及其运动学、动力学、运动规划和运动稳定性等进行了系 统的理论分析和计算仿真研究,并研制了两代跳跃机器人[20]。为仿袋鼠跳跃 机器人的实现,解决弹跳关键性问题奠定了理论基础。 北方工业大学的李涛总结了国内外跳跃机器人机构,提出了跳跃机器人的 弹簧-拨杆模型,并对模型进行了运动学分析和仿真研究,设计了一种仿青蛙 的跳跃机器人系统。该样机采用弹簧进行储能,作用于后肢的各个关节,使用 拨杆作为释放机构2。 图1-13西北工业大学仿袋鼠弹跳机图1-14北方工业大学仿青蛙跳跃机器人 哈尔滨工业大学的余杭杞和郁万春对仿蝗虫跳跃机器人的起跳机理进行了 研究并设计了原理样机,进行了仿真和实验22。哈尔滨工业大学王猛等人通 过青蛙跳跃轨迹提取实验获取运动信息,研究了青蛙跳跃机理。提出一种面向 跳跃运功的机构模型,进行了仿青蛙跳跃机器人的研制。对整个跳跃过程进行 了运动学分析,建立了动力学状态方程。利用遗传算法进行了多参数多目标的 跳跃轨迹规划,建立了机器人的控制系统并进行了实验研究2)。 -6-
哈尔滨工业大学工学硕士学位论文 - 6 - 性步行机构[17]。该机构模仿人体下肢,在小腿中放置了四组并联弹性元件, 和以机器人腿外壳为机架的四杆机构配合,具有缓冲、储能效果。上海交通大 学的杨煜普等人提出了一种单腿机器人,具有翻转跳跃运动模式[18],分析了 机器人的运动结构和轨迹规划。 南京航空航天大学刘壮志在国内率先进行了弹跳机器人的研究,对国外的 跳跃机器人进行了总结,并提出九种实现方案,对五种典型弹跳机构进行了运 动和动力分析,对单杆弹跳机构和六杆弹跳机构完成了理论分析和设计制作, 分析了跳跃机器人运动序列规划及控制问题[19]。李宝江进行了间歇弹跳机器 人的模型分析,研究了轨迹预测理论和神经网络理论在弹跳机器人上的应用, 并设计出类似 NASA-III 的轮式跳跃移动机器人。 西北工业大学葛文杰教授的课题组对仿袋鼠跳跃机器人做了系统的研究工 作,理论研究比较全面。对袋鼠的跳跃运动机理进行了分析,对仿袋鼠机器人 的刚、柔性多体机构及其运动学、动力学、运动规划和运动稳定性等进行了系 统的理论分析和计算仿真研究,并研制了两代跳跃机器人[20]。为仿袋鼠跳跃 机器人的实现,解决弹跳关键性问题奠定了理论基础。 北方工业大学的李涛总结了国内外跳跃机器人机构,提出了跳跃机器人的 弹簧-拨杆模型,并对模型进行了运动学分析和仿真研究,设计了一种仿青蛙 的跳跃机器人系统。该样机采用弹簧进行储能,作用于后肢的各个关节,使用 拨杆作为释放机构[21]。 图 1-13 西北工业大学仿袋鼠弹跳机 图 1-14 北方工业大学仿青蛙跳跃机器人 哈尔滨工业大学的余杭杞和郁万春对仿蝗虫跳跃机器人的起跳机理进行了 研究并设计了原理样机,进行了仿真和实验[22]。哈尔滨工业大学王猛等人通 过青蛙跳跃轨迹提取实验获取运动信息,研究了青蛙跳跃机理。提出一种面向 跳跃运功的机构模型,进行了仿青蛙跳跃机器人的研制。对整个跳跃过程进行 了运动学分析,建立了动力学状态方程。利用遗传算法进行了多参数多目标的 跳跃轨迹规划,建立了机器人的控制系统并进行了实验研究[23]

哈尔滨工业大学工学硕士学位论文 图1-15哈工大仿蝗虫跳跃机器人 图1-16哈工大仿青蛙跳跃机器人 国内对跳跃机器人的研究多在理论分析和吸收学习国外先进样机的阶段, 在跳跃机器人的设计和跳跃理论研究方面有很大的发展空间和潜力。对仿青蛙 跳跃机器人的研究更是较少,多数大学和研究机构都仅仅是对动物的运动特性 进行了分析,并没有进行样机的开发。仿生跳跃机器人当从运动机理,机构和 驱动,控制系统,运动规划和稳定性方面进行全面系统的研究工作,更重要的 是,需要找到机器人应用的切入点,为后续的研究工作提供可能。 1.3机器人稳定性研究综述 仿生机器人运动稳定性24]包括静态稳定性研究和动态稳定性研究。由于 足式机器人运动复杂,腿部自由度较多,有着特殊的运动模式,因此需要进行 运动稳定性研究,常见的足式机器人有双足和多足行走及爬行机器人或者跳跃 机器人。对于这些机器人的研究,使得机器人运动稳定性理论有了一定的发 展,并在逐步完善,对以后的仿生机器人控制工作有着重要的意义。另外,随 着现代控制数学的不断发展,这也为仿生机器人稳定性控制的研究提供的新的 方法和思路。 1.3.1机器人稳定性研究方法 现阶段仿生机器人稳定性研究的主要研究方法2]如下表所示。 表1-1仿生机器人稳定性研究方法 方法分类 几何投影方法 力-力矩方程方法 能量方法 重心投影法 静态稳定判据 静态稳定边界法 能量稳定边界法 角动量法 动态稳定判据 ZMP法 力-角法 李雅普诺夫理论 CoP法 稳定锥法 庞加莱映射 -7-
哈尔滨工业大学工学硕士学位论文 - 7 - 图 1-15 哈工大仿蝗虫跳跃机器人 图 1-16 哈工大仿青蛙跳跃机器人 国内对跳跃机器人的研究多在理论分析和吸收学习国外先进样机的阶段, 在跳跃机器人的设计和跳跃理论研究方面有很大的发展空间和潜力。对仿青蛙 跳跃机器人的研究更是较少,多数大学和研究机构都仅仅是对动物的运动特性 进行了分析,并没有进行样机的开发。仿生跳跃机器人当从运动机理,机构和 驱动,控制系统,运动规划和稳定性方面进行全面系统的研究工作,更重要的 是,需要找到机器人应用的切入点,为后续的研究工作提供可能。 1.3 机器人稳定性研究综述 仿生机器人运动稳定性[24]包括静态稳定性研究和动态稳定性研究。由于 足式机器人运动复杂,腿部自由度较多,有着特殊的运动模式,因此需要进行 运动稳定性研究,常见的足式机器人有双足和多足行走及爬行机器人或者跳跃 机器人。对于这些机器人的研究,使得机器人运动稳定性理论有了一定的发 展,并在逐步完善,对以后的仿生机器人控制工作有着重要的意义。另外,随 着现代控制数学的不断发展,这也为仿生机器人稳定性控制的研究提供的新的 方法和思路。 1.3.1 机器人稳定性研究方法 现阶段仿生机器人稳定性研究的主要研究方法[25]如下表所示。 表 1-1 仿生机器人稳定性研究方法 方法分类 几何投影方法 力-力矩方程方法 能量方法 静态稳定判据 重心投影法 静态稳定边界法 能量稳定边界法 动态稳定判据 ZMP 法 CoP 法 角动量法 力-角法 稳定锥法 李雅普诺夫理论 庞加莱映射