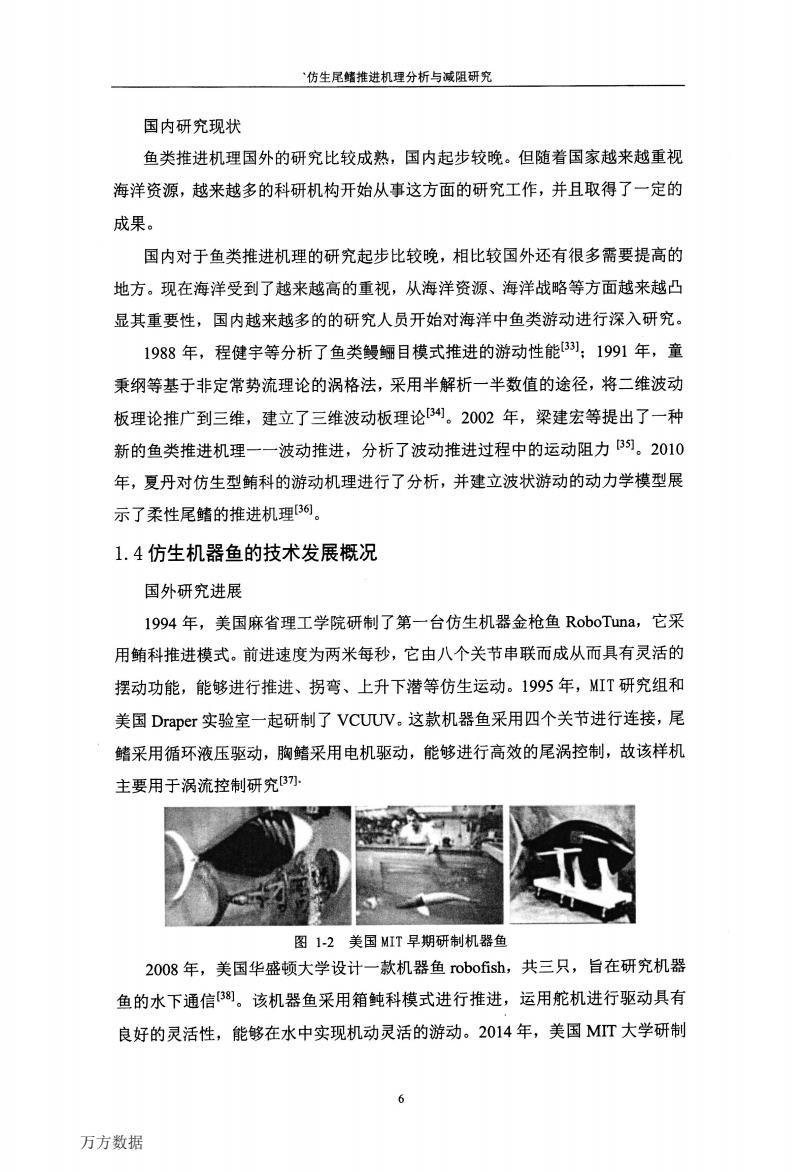
`仿生尾鳍推进机理分析与减阻研究 国内研究现状 鱼类推进机理国外的研究比较成熟,国内起步较晚。但随着国家越来越重视 海洋资源,越来越多的科研机构开始从事这方面的研究工作,并且取得了一定的 成果。 国内对于鱼类推进机理的研究起步比较晚,相比较国外还有很多需要提高的 地方。现在海洋受到了越来越高的重视,从海洋资源、海洋战略等方面越来越凸 显其重要性,国内越来越多的的研究人员开始对海洋中鱼类游动进行深入研究。 1988年,程健宇等分析了鱼类鳗鲡目模式推进的游动性能33):1991年,童 秉纲等基于非定常势流理论的涡格法,采用半解析一半数值的途径,将二维波动 板理论推广到三维,建立了三维波动板理论3刚。2002年,梁建宏等提出了一种 新的鱼类推进机理一一波动推进,分析了波动推进过程中的运动阻力B。2010 年,夏丹对仿生型鲔科的游动机理进行了分析,并建立波状游动的动力学模型展 示了柔性尾鳍的推进机理3 1.4仿生机器鱼的技术发展概况 国外研究进展 l994年,美国麻省理工学院研制了第一台仿生机器金枪鱼RoboTuna,它采 用鲔科推进模式。前进速度为两米每秒,它由八个关节串联而成从而具有灵活的 摆动功能,能够进行推进、拐弯、上升下潜等仿生运动。1995年,MIT研究组和 美国Draper实验室一起研制了VCUUV。这款机器鱼采用四个关节进行连接,尾 鳍采用循环液压驱动,胸鳍采用电机驱动,能够进行高效的尾涡控制,故该样机 主要用于涡流控制研究3刃 图1-2美国MIT早期研制机器鱼 2008年,美国华盛顿大学设计一款机器鱼robofish,共三只,旨在研究机器 鱼的水下通信38)。该机器鱼采用箱鲀科模式进行推进,运用舵机进行驱动具有 良好的灵活性,能够在水中实现机动灵活的游动。2014年,美国MT大学研制 6 万方数据
、仿生尾鳍推进机理分析与减阻研究 国内研究现状 鱼类推进机理国外的研究比较成熟,国内起步较晚。但随着国家越来越重视 海洋资源,越来越多的科研机构开始从事这方面的研究工作,并且取得了一定的 成果。 国内对于鱼类推进机理的研究起步比较晚,相比较国外还有很多需要提高的 地方。现在海洋受到了越来越高的重视,从海洋资源、海洋战略等方面越来越凸 显其重要性,国内越来越多的的研究人员开始对海洋中鱼类游动进行深入研究。 1988年,程健宇等分析了鱼类鳗鲡目模式推进的游动性能[33】;1991年,童 秉纲等基于非定常势流理论的涡格法,采用半解析一半数值的途径,将二维波动 板理论推广到三维,建立了三维波动板理论【341。2002年,梁建宏等提出了一种 新的鱼类推进机理一一波动推进,分析了波动推进过程中的运动阻力‘3 51。2010 年,夏丹对仿生型鲔科的游动机理进行了分析,并建立波状游动的动力学模型展 示了柔性尾鳍的推进机理[361。 1.4仿生机器鱼的技术发展概况 国外研究进展 1994年,美国麻省理工学院研制了第一台仿生机器金枪鱼RoboTuna,它采 用鲔科推进模式。前进速度为两米每秒,它由八个关节串联而成从而具有灵活的 摆动功能,能够进行推进、拐弯、上升下潜等仿生运动。1995年,MIT研究组和 美国Draper实验室一起研制了VCUUV。这款机器鱼采用四个关节进行连接,尾 鳍采用循环液压驱动,胸鳍采用电机驱动,能够进行高效的尾涡控制,故该样机 主要用于涡流控制研究【37】。 ◆一目图1-2美国MIT早期研制机器鱼 2008年,美国华盛顿大学设计一款机器鱼robofish,共三只,旨在研究机器 鱼的水下通信【38]。该机器鱼采用箱纯科模式进行推进,运用舵机进行驱动具有 良好的灵活性,能够在水中实现机动灵活的游动。2014年,美国MIT大学研制 万方数据
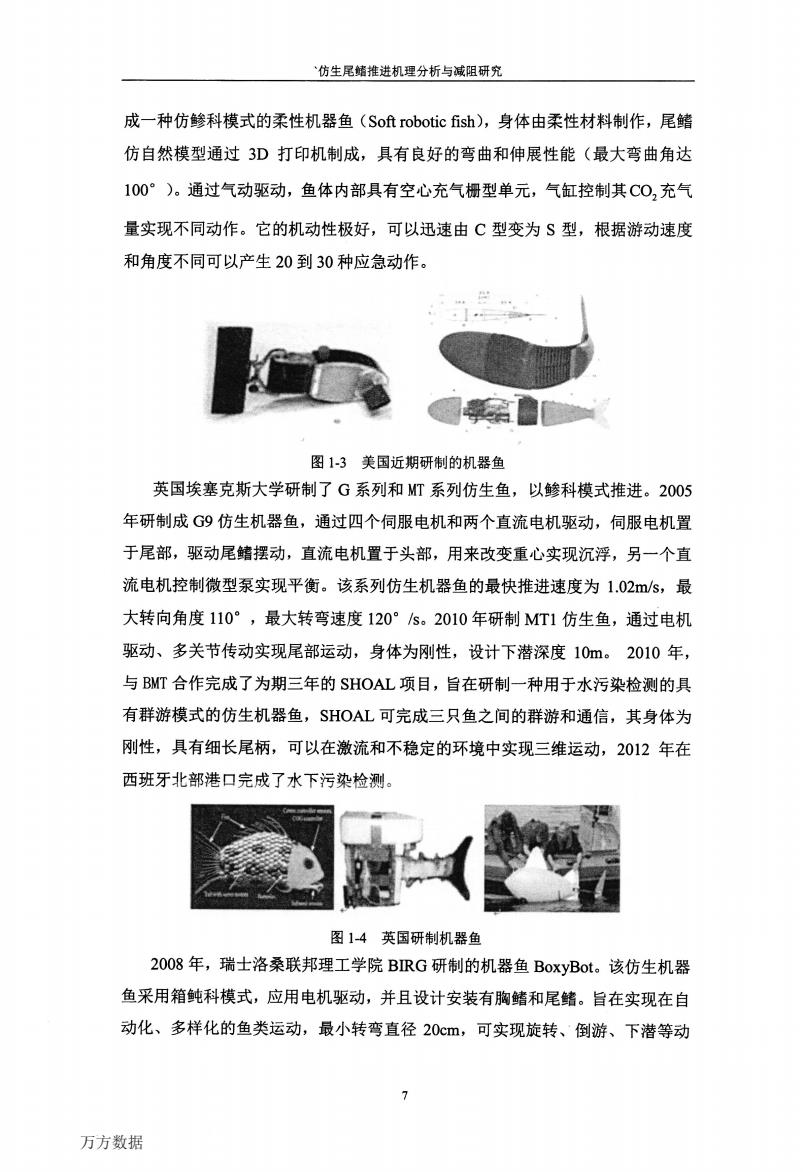
仿生尾鳍推进机理分析与减阻研究 成一种仿鲹科模式的柔性机器鱼(Soft robotic fish),身体由柔性材料制作,尾鳍 仿自然模型通过3D打印机制成,具有良好的弯曲和伸展性能(最大弯曲角达 100°)。通过气动驱动,鱼体内部具有空心充气栅型单元,气缸控制其C0,充气 量实现不同动作。它的机动性极好,可以迅速由C型变为S型,根据游动速度 和角度不同可以产生20到30种应急动作。 图1-3美国近期研制的机器鱼 英国埃塞克斯大学研制了G系列和MT系列仿生鱼,以鲹科模式推进。2005 年研制成G9仿生机器鱼,通过四个伺服电机和两个直流电机驱动,伺服电机置 于尾部,驱动尾鳍摆动,直流电机置于头部,用来改变重心实现沉浮,另一个直 流电机控制微型泵实现平衡。该系列仿生机器鱼的最快推进速度为1.02m/s,最 大转向角度110°,最大转弯速度120°s。2010年研制MT1仿生鱼,通过电机 驱动、多关节传动实现尾部运动,身体为刚性,设计下潜深度10m。2010年, 与BMT合作完成了为期三年的SHOAL项目,旨在研制一种用于水污染检测的具 有群游模式的仿生机器鱼,SHOAL可完成三只鱼之间的群游和通信,其身体为 刚性,具有细长尾柄,可以在激流和不稳定的环境中实现三维运动,2012年在 西班牙北部港口完成了水下污染检测。 图1-4英国研制机器鱼 2008年,瑞士洛桑联邦理工学院BRG研制的机器鱼BoxyBot。该仿生机器 鱼采用箱鲀科模式,应用电机驱动,并且设计安装有胸鳍和尾鳍。旨在实现在自 动化、多样化的鱼类运动,最小转弯直径20℃m,可实现旋转、倒游、下潜等动 7 万方数据
、仿生尾鳍推进机理分析与减阻研究 成一种仿鲣科模式的柔性机器鱼(Soft robotic fish),身体由柔性材料制作,尾鳍 仿自然模型通过3D打印机制成,具有良好的弯曲和伸展性能(最大弯曲角达 100。)。通过气动驱动,鱼体内部具有空心充气栅型单元,气缸控制其CO:充气 量实现不同动作。它的机动性极好,可以迅速由C型变为S型,根据游动速度 和角度不同可以产生20到30种应急动作。 隳豁:l《 图1-3美国近期研制的机器鱼 英国埃塞克斯大学研制了G系列和MT系列仿生鱼,以鳕科模式推进。2005 年研制成G9仿生机器鱼,通过四个伺服电机和两个直流电机驱动,伺服电机置 于尾部,驱动尾鳍摆动,直流电机置于头部,用来改变重心实现沉浮,另一个直 流电机控制微型泵实现平衡。该系列仿生机器鱼的最快推进速度为1.02m/s,最 大转向角度110。,最大转弯速度120。/s。2010年研制MTl仿生鱼,通过电机 驱动、多关节传动实现尾部运动,身体为刚性,设计下潜深度lOm。2010年, 与BMT合作完成了为期三年的SHOAL项目,旨在研制一种用于水污染检测的具 有群游模式的仿生机器鱼,SHOAL可完成三只鱼之间的群游和通信,其身体为 刚性,具有细长尾柄,可以在激流和不稳定的环境中实现三维运动,2012年在 西班牙北部港口完成了水下污染检测。 一矗汉一 图1—4英国研制机器鱼 2008年,瑞士洛桑联邦理工学院BIRG研制的机器鱼BoxyBot。该仿生机器 鱼采用箱纯科模式,应用电机驱动,并且设计安装有胸鳍和尾鳍。旨在实现在自 动化、多样化的鱼类运动,最小转弯直径20cm,可实现旋转、倒游、下潜等动 万方数据
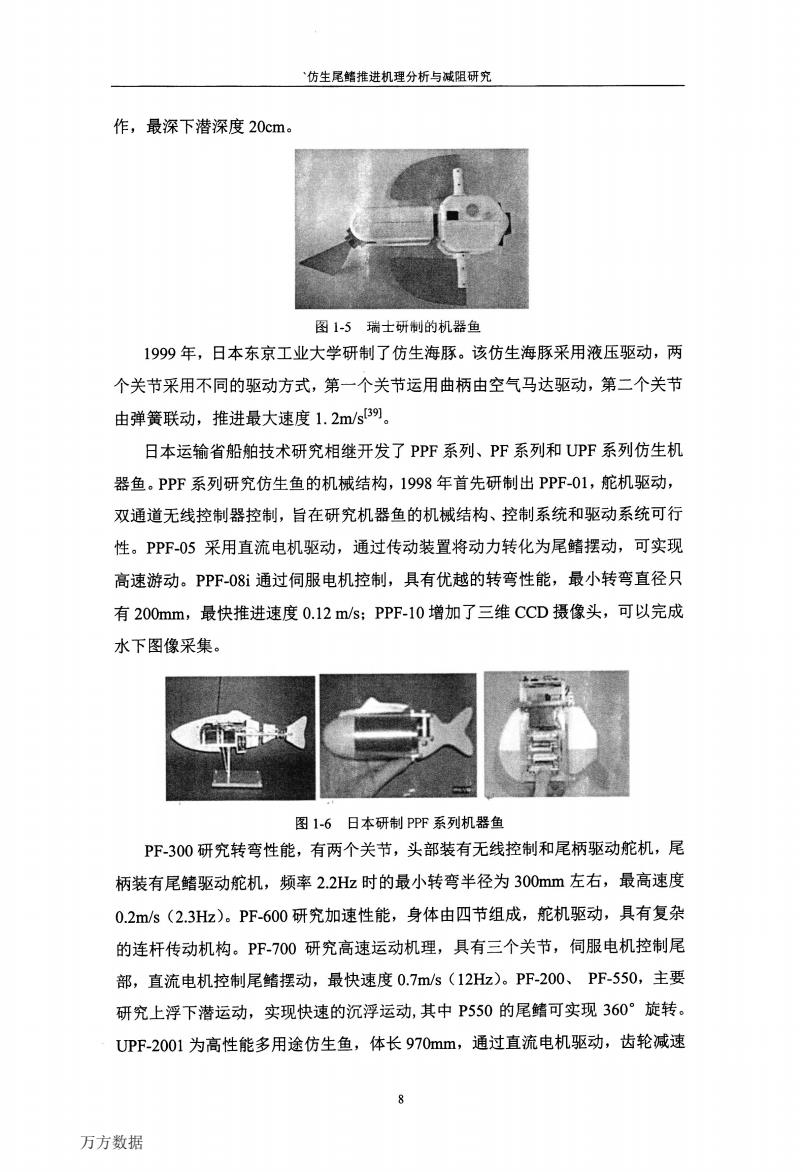
·仿生尾鳍推进机理分析与减阻研究 作,最深下潜深度20cm。 图1-5瑞士研制的机器鱼 1999年,日本东京工业大学研制了仿生海豚。该仿生海豚采用液压驱动,两 个关节采用不同的驱动方式,第一个关节运用曲柄由空气马达驱动,第二个关节 由弹簧联动,推进最大速度1.2m/s39。 日本运输省船舶技术研究相继开发了PP℉系列、P℉系列和UP℉系列仿生机 器鱼。PP℉系列研究仿生鱼的机械结构,1998年首先研制出PP℉-01,舵机驱动, 双通道无线控制器控制,旨在研究机器鱼的机械结构、控制系统和驱动系统可行 性。PP℉-05采用直流电机驱动,通过传动装置将动力转化为尾鳍摆动,可实现 高速游动。PP℉-08i通过伺服电机控制,具有优越的转弯性能,最小转弯直径只 有200mm,最快推进速度0.12m/s:PP℉-10增加了三维CCD摄像头,可以完成 水下图像采集。 图1-6日本研制PP℉系列机器鱼 P℉300研究转弯性能,有两个关节,头部装有无线控制和尾柄驱动舵机,尾 柄装有尾鳍驱动舵机,频率2.2Hz时的最小转弯半径为300mm左右,最高速度 0.2m/s(2.3Hz)。P℉-600研究加速性能,身体由四节组成,舵机驱动,具有复杂 的连杆传动机构。P℉700研究高速运动机理,具有三个关节,伺服电机控制尾 部,直流电机控制尾鳍摆动,最快速度0.7m/s(12Hz)。P℉-200、PF-550,主要 研究上浮下潜运动,实现快速的沉浮运动,其中P550的尾鳍可实现360°旋转。 UP℉-2001为高性能多用途仿生鱼,体长970mm,通过直流电机驱动,齿轮减速 万方数据
、仿生尾鳝推进机理分析与减阻研究 作,最深下潜深度20em。 图l·5瑞士研制的j6IL器鱼 1999年,日本东京工业大学研制了仿生海豚。该仿生海豚采用液压驱动,两 个关节采用不同的驱动方式,第一个关节运用曲柄由空气马达驱动,第二个关节 由弹簧联动,推进最大速度1.2m/s[391。 日本运输省船舶技术研究相继开发了PPF系列、PF系列和UPF系列仿生机 器鱼。PPF系列研究仿生鱼的机械结构,1998年首先研制出PPF。01,舵机驱动, 双通道无线控制器控制,旨在研究机器鱼的机械结构、控制系统和驱动系统可行 性。PPF.05采用直流电机驱动,通过传动装置将动力转化为尾鳍摆动,可实现 高速游动。PPF.08i通过伺服电机控制,具有优越的转弯性能,最小转弯直径只 有200mm,最快推进速度O.12 m/s;PPF.10增加了三维CCD摄像头,可以完成 水下图像采集。 图1-6日本研制PPF系列机器鱼 PF.300研究转弯性能,有两个关节,头部装有无线控制和尾柄驱动舵机,尾 柄装有尾鳍驱动舵机,频率2.2Hz时的最小转弯半径为300mm左右,最高速度 0.2m/s(2.3Hz)。PF.600研究加速性能,身体由四节组成,舵机驱动,具有复杂 的连杆传动机构。PF.700研究高速运动机理,具有三个关节,伺服电机控制尾 部,直流电机控制尾鳍摆动,最快速度0.7m/s(12Hz)。PF.200、PF一550,主要 研究上浮下潜运动,实现快速的沉浮运动,其中P550的尾鳍可实现360。旋转。 UPF.2001为高性能多用途仿生鱼,体长970mm,通过直流电机驱动,齿轮减速 万方数据
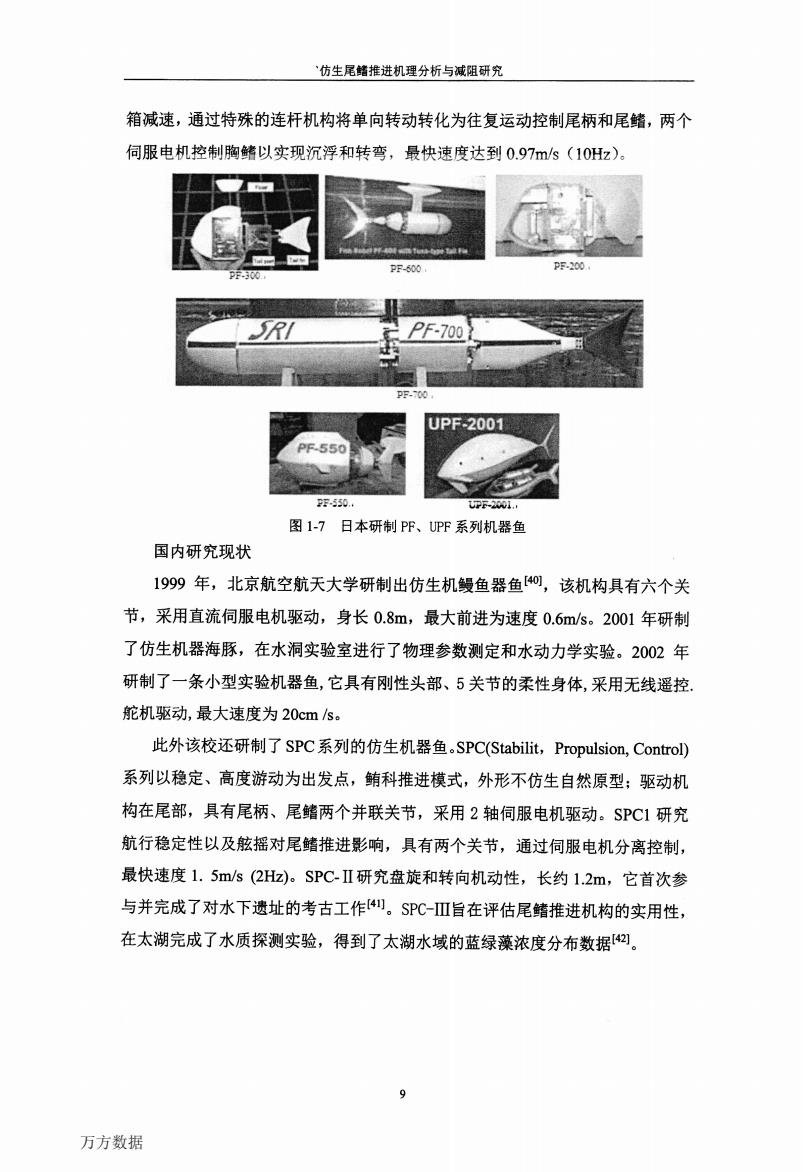
仿生尾鳍推进机理分析与减阻研究 箱减速,通过特殊的连杆机构将单向转动转化为往复运动控制尾柄和尾鳍,两个 伺服电机控制胸鳍以实现沉浮和转弯,最快速度达到0.97ms(10Hz)。 PF-600 PF-200 9.300 PF-700 UPF-2001 PF.550 PF-50, PF201., 图1-7日本研制PF、UPP系列机器鱼 国内研究现状 1999年,北京航空航天大学研制出仿生机鳗鱼器鱼o,该机构具有六个关 节,采用直流伺服电机驱动,身长0.8m,最大前进为速度0.6m/s。2001年研制 了仿生机器海豚,在水洞实验室进行了物理参数测定和水动力学实验。2002年 研制了一条小型实验机器鱼,它具有刚性头部、5关节的柔性身体,采用无线遥控, 舵机驱动,最大速度为20cm/s。 此外该校还研制了SPC系列的仿生机器鱼。SPC(Stabilit,.Propulsion,.Control) 系列以稳定、高度游动为出发点,鲔科推进模式,外形不仿生自然原型;驱动机 构在尾部,具有尾柄、尾鳍两个并联关节,采用2轴伺服电机驱动。SPC1研究 航行稳定性以及舷摇对尾鳍推进影响,具有两个关节,通过伺服电机分离控制, 最快速度1.5m/s(2Hz)。SPC-Ⅱ研究盘旋和转向机动性,长约1.2m,它首次参 与并完成了对水下遗址的考古工作4。SPC-Ⅲ旨在评估尾鳍推进机构的实用性, 在太湖完成了水质探测实验,得到了太湖水域的蓝绿藻浓度分布数据2。 万方数据
、仿生尾鳍推进机理分析与减阻研究 箱减速,通过特殊的连杆机构将单向转动转化为往复运动控制尾柄和尾鳍,两个 伺服电机控制胸鳍以实现沉浮和转弯,最快速度达到0.97m/s(10Hz)c ■:·二二.t u—t?‘妇▲.’ 图1—7 日本研制PF、UPF系列机器鱼 国内研究现状 1999年,北京航空航天大学研制出仿生机鳗鱼器鱼【40】,该机构具有六个关 节,采用直流伺服电机驱动,身长0.8m,最大前进为速度0.6m/s。2001年研制 了仿生机器海豚,在水洞实验室进行了物理参数测定和水动力学实验。2002年 研制了一条小型实验机器鱼,它具有刚性头部、5关节的柔性身体,采用无线遥控. 舵机驱动,最大速度为20cm/s。 此外该校还研制了SPC系列的仿生机器鱼。SPC(Stabilit,Propulsion,Contr01) 系列以稳定、高度游动为出发点,鲔科推进模式,外形不仿生自然原型;驱动机 构在尾部,具有尾柄、尾鳍两个并联关节,采用2轴伺服电机驱动。SPCI研究 航行稳定性以及舷摇对尾鳍推进影响,具有两个关节,通过伺服电机分离控制, 最快速度1.5m/s(2Hz)。SPC.II研究盘旋和转向机动性,长约1.2m,它首次参 与并完成了对水下遗址的考古工作【4l】。SPC-III旨在评估尾鳍推进机构的实用性, 在太湖完成了水质探测实验,得到了太湖水域的蓝绿藻浓度分布数据[421。 万方数据
仿生尾鳍推进机理分析与减阻研究 图1-8北京航空航天大学研制的BCF仿生机器鱼 2003年哈尔滨工程大学研制了仿鱼机器人原理样机“仿生I”,长2.4m,潜 水深度10m,最快速度1.2m/s,由两台伺服电机分别驱动尾鳍和胸鳍,可实现直 航、回转和浮潜。2006年哈尔滨工业大学成功研制了两关节鲹科仿生机器鱼 “HRFI”,其游动速度0.5m/s,可完成浮潜和转向,2007年研制成HRFⅡ仿生 机器鱼,结构与前者相似,体长1.5m,平均游速0.6m(2Hz),可完成转弯,浮 潜和逆向游动,在无推进速度情况下最大上升速度为0.35m/s,最大下降速度为 0.32m/s431。 图1-9哈尔滨工程大学、哈尔滨工业大学研制的仿生鱼 2012年北京理工大学研制了“BLRF-I”系列仿鳍科机器鱼。它采用舵机进 行驱动,通过更改舵机单元形成单关节、两关节和三关节仿生机器鱼,最小转弯 半径13.25cm(两关节),最快速度16.5cm/s(三关节)。2013年香港中文大 学Yong Zhong等研制了基于线驱动的仿生机器鱼,脊椎处具有七个关节,具有 一对胸鳍,尾部通过两个伺服电机分别控制两套绳索机构,体长555mm,尾鳍 推进最快0.37m/s,胸鳍推进最快0.14m/s,转弯半径13.9cm。 1.5本论文的主要内容 本文主要是应用计算流体力学来进行尾鳍推进理理分析以及外形阻力分析, 并进行尾部机构的仿生运动,为新型水下推进设备的研制提供理论基础。因此本 文的主要研究工作如下: 10 万方数据
、仿生尾鳝推进机理分析与减阻研究 图l一8北京航空航天大学研制的BCF仿生机器鱼 蔑蠢 2003年哈尔滨工程大学研制了仿鱼机器人原理样机“仿生I”,长2.4m,潜 水深度10m,最快速度1.2m/s,由两台伺服电机分别驱动尾鳍和胸鳍,可实现直 航、回转和浮潜。2006年哈尔滨工业大学成功研制了两关节鳆科仿生机器鱼 “HRF I”,其游动速度0.5m/s,可完成浮潜和转向,2007年研制成HRF II仿生 机器鱼,结构与前者相似,体长1.5m,平均游速0.6m(2Hz),可完成转弯,浮 潜和逆向游动,在无推进速度情况下最大上升速度为0.35m/s,最大下降速度为 0 。 图1-9 哈尔滨工程大学、哈尔滨工业大学研制的仿生鱼 2012年北京理工大学研制了“BLRF.I”系列仿鳍科机器鱼。它采用舵机进 行驱动,通过更改舵机单元形成单关节、两关节和三关节仿生机器鱼,最小转弯 半径13.25cm(两关节),最快速度16.5cm/s(--关节)【441。2013年香港中文大 学Yong Zhong等研制了基于线驱动的仿生机器鱼,脊椎处具有七个关节,具有 一对胸鳍,尾部通过两个伺服电机分别控制两套绳索机构,体长555mm,尾鳍 推进最快0.37m/s,胸鳍推进最快0.14m/s,转弯半径13.9cm。 1.5本论文的主要内容 本文主要是应用计算流体力学来进行尾鳍推进理理分析以及外形阻力分析, 并进行尾部机构的仿生运动,为新型水下推进设备的研制提供理论基础。因此本 文的主要研究工作如下: 10 zkq 20160323 万方数据