仿生尾鳍推进机理分析与减阻研究 1.绪论 1.1课题研究背景及意义 随着海洋战略地位的不但提升,海洋装备技术在近几十年得到了快速的发展。 水下机器人在水下工作的便捷性与可靠性吸引着众多科研人员进行开发研究。20 世纪中叶以来,随着科技的发展,机器人技术开始起步并且飞速发展。现阶段水 下机器人多采用螺旋桨推进器口,该种推进器的存在能耗大、推进效率低、机动 性能差等缺点。螺旋桨推进器的这些缺点阻碍着高机动性水下机器人的发展。人 们正在尝试开发新型的水下推进设备,以改善传统螺旋桨的缺点,为水下机器人 的发展提供更广阔的空间。 鱼类在复杂的水流环境进行不断适应和进化,具有了灵活自如的姿态控制能 力。鱼类的快速启动、拐弯、及时根据水流调整运动姿态等高灵活性动作,使 得人们对鱼类的游动机理产生了浓厚的兴趣。 对鱼类的推进方式进行分析研究,并与传统的螺旋桨进行对比,并从仿生角 度将鱼类的推进机理应用到仿生机器鱼等水下设备,将从根本上改善推进设备的 推进形式和推进模式,为高效率低能耗的新型水下推进设备提供了广阔的思路与 研究方向。仿生机器鱼依靠其灵活的推进方式以及机动的姿态控制,可以在复杂 的水流环境下进行高效可靠的作业。 水下机器人按照其做作业方式可分为遥控水下机器人(Remotely Operated Vehicle,.ROV)和自主水下机器人(Autonomous Underwater Vehicle,.AUV),水下 自主机器人具有机动灵活性高、续航能力强、成本较低等优点,成为水下设备中 较为重要的设备品种。自主水下机器人一般具有回转型外形,并以螺旋桨为推 进装置,采用这种设计的自主水下机器人存在着推进效率低,机动性能差,噪音 大等缺点,不便于在复杂水流环境中运动。 相比较于鱼类运动的高灵活性和尾部运动的高效率,现阶段的水下机器人的 运动机动性与之相差甚远。比如鱼体通过尾柄尾鳍的有规律的摆动以及身体其它 部位的调整配合,可以将推进效率保持在百分之八十左右,而传统的螺旋桨推进 器的只有百分之四十左右:同时鱼类可以在速度保持不变的情况下进行小半径灵 活转弯,其中转弯半径小于身体的三分之一。而船舶只能以3~5倍的转弯半径进 行缓慢转弯。 万方数据
仿生尾鳍推进机理分析与减阻研宄 1.绪论 1.1课题研究背景及意义 随着海洋战略地位的不但提升,海洋装备技术在近几十年得到了快速的发展。 水下机器人在水下工作的便捷性与可靠性吸引着众多科研人员进行开发研究。20 世纪中叶以来,随着科技的发展,机器人技术开始起步并且飞速发展。现阶段水 下机器人多采用螺旋桨推进器[1】,该种推进器的存在能耗大、推进效率低、机动 性能差等缺点。螺旋桨推进器的这些缺点阻碍着高机动性水下机器人的发展。人 们正在尝试开发新型的水下推进设备,以改善传统螺旋桨的缺点,为水下机器人 的发展提供更广阔的空间。 鱼类在复杂的水流环境进行不断适应和进化,具有了灵活自如的姿态控制能 力[2]。鱼类的快速启动、拐弯、及时根据水流调整运动姿态等高灵活性动作,使 得人们对鱼类的游动机理产生了浓厚的兴趣‘31。 对鱼类的推进方式进行分析研究,并与传统的螺旋桨进行对比,并从仿生角 度将鱼类的推进机理应用到仿生机器鱼等水下设备,将从根本上改善推进设备的 推进形式和推进模式,为高效率低能耗的新型水下推进设备提供了广阔的思路与 研究方向。仿生机器鱼依靠其灵活的推进方式以及机动的姿态控制,可以在复杂 的水流环境下进行高效可靠的作,ll,t41。 水下机器人按照其做作业方式可分为遥控水下机器人(Remotely Operated Vehicle,ROV)和自主水下机器人(Autonomous UnderwaterVehicle,AUv),水下 自主机器人具有机动灵活性高、续航能力强、成本较低等优点,成为水下设备中 较为重要的设备品种【51。自主水下机器人一般具有回转型外形,并以螺旋桨为推 进装置,采用这种设计的自主水下机器人存在着推进效率低,机动性能差,噪音 大等缺点,不便于在复杂水流环境中运动。 相比较于鱼类运动的高灵活性和尾部运动的高效率,现阶段的水下机器人的 运动机动性与之相差甚远。比如鱼体通过尾柄尾鳍的有规律的摆动以及身体其它 部位的调整配合,可以将推进效率保持在百分之八十左右,而传统的螺旋桨推进 器的只有百分之四十左右;同时鱼类可以在速度保持不变的情况下进行小半径灵 活转弯,其中转弯半径小于身体的三分之一。而船舶只能以3。5倍的转弯半径进 行缓慢转弯。 万方数据

仿生尾罐推进机理分析与减阻研究 本论文的研究目的旨在通过对尾鳍的水动力性能数值计算及其周围流场的 特征,来详细剖析鱼类游动的机理。 本文主要通过CFD流体力学软件Fluent进行尾鳍运动的推进机理研究,运 用连杆机构对鱼体波进行仿生拟合运动,并将鱼体外形与传统回转型水下航行器 进行外形水动力分析,从而为新型水下推进装置的设计与开发提供理论基础。 1.2鱼类推进方式分类及比较 鱼类具有不同的外形体态和各式各样的游动模式。在长距离游动中鱼类主要 运用周期运动,在快速启动和快速转弯时主要运用瞬时运动。在复杂的水流环境 中,为了能够适应环境并且得以生存和灵活运动,各式各样的鱼类进化出了名目 繁多的运动推进方式。周期性运动的鱼类具有较高的游泳能力,并且具有较高推 进效率和低能耗特点,是研究者主要的研究对象。 自上世纪初,人们对于鱼类推进方式就开始了初步探索。1926年,Breder!向 将鱼的游动形式分为三大类:分别为鳗鲡模式(anguil训ifom),尾鳍摆动模式 (ostraciiform)和鲹科模式(caragiform)。l978年,Lindsey在Breder的分类基础 上增加了亚鲹科模式(Subcarangiform)和鲔科模式(又称鲹科加月尾鳍模式, Thunniform)。 1984年P.W.Wbb⑧根据鱼类推进所使用的身体的部位不同将鱼类的游动形 式划分为两种: (1)通过尾鳍运动来向前运动的模式被称为BCF(Body and Caudal Fin)运动模 式: (2)通过中间鳍和对鳍的运动来向前运动的推进模式被称为MPF(Middle and Pectoral fins)运动模式。其中:中间鳍有背鳍(Dorsal fin)和臀鳍(Anal fin);对鳍 包括胸鳍(pectoral fin)和腹鳍(Pelvic fins)。 据统计,世界上有85%的鱼类是采取BCF运动模式作为他们运动的主要方式, 而采用BC℉运动模式的鱼类通常要借助MPF运动模式来调整自身的运动形态, 达到可操纵性和稳定性。当然鱼类还有其它运动方式,如喷流推进、滑行等。据 估计,大约只有15%的鱼类采用第一种方式以外的其他方式推进9。由于MP℉推 进方式速度慢、效率低,因此我们把重点放在研究BCF推进方式上。 海洋中大多数鱼类主要以BCF为推进方式来前进,并且这种鱼类通过MP℉ 2 万方数据
仿生尾鳝推进机理分析与减阻研究 本论文的研究目的旨在通过对尾鳍的水动力性能数值计算及其周围流场的 特征,来详细剖析鱼类游动的机理。 本文主要通过CFD流体力学软件Fluent进行尾鳍运动的推进机理研究,运 用连杆机构对鱼体波进行仿生拟合运动,并将鱼体外形与传统回转型水下航行器 进行外形水动力分析,从而为新型水下推进装置的设计与开发提供理论基础。 1.2鱼类推进方式分类及比较 鱼类具有不同的外形体态和各式各样的游动模式。在长距离游动中鱼类主要 运用周期运动,在快速启动和快速转弯时主要运用瞬时运动。在复杂的水流环境 中,为了能够适应环境并且得以生存和灵活运动,各式各样的鱼类进化出了名目 繁多的运动推进方式。周期性运动的鱼类具有较高的游泳能力,并且具有较高推 进效率和低能耗特点,是研究者主要的研究对象。 自上世纪初,人们对于鱼类推进方式就开始了初步探索。1926年,Breder【6] 将鱼的游动形式分为三大类:分别为鳗鲡模式(anguilliform),尾鳍摆动模式 (ostraciiform)和鲮科模式(caragiform)。1978年,Lindseyl71在Breder的分类基础 上增加了亚鲮科模式(Subcarangiform)和鲔科模式(又称鲣科加月尾鳍模式, ThunniforlTl)。 1984年P.W.Webb[8]丰艮据鱼类推进所使用的身体的部位不同将鱼类的游动形 式划分为两种: (1)通过尾鳍运动来向前运动的模式被称为BCF(Body and Caudal Fin)运动模 式; (2)通过中间鳍和对鳍的运动来向前运动的推进模式被称为MPF(Middle and Pectoral fins)运动模式。其中:中间鳍有背鳍(Dorsal fm)和臀鳍(Anal fin);对鳍 包括胸鳍(pectoral fin)和腹鳍(Pelvic fins)。 据统计,世界上有85%的鱼类是采取BCF运动模式作为他们运动的主要方式, 而采用BCF运动模式的鱼类通常要借助MPF运动模式来调整自身的运动形态, 达到可操纵性和稳定性。当然鱼类还有其它运动方式,如喷流推进、滑行等。据 估计,大约只有15%的鱼类采用第一种方式以外的其他方式推进‘91。由于肝F推 进方式速度慢、效率低,因此我们把重点放在研究BCF推进方式上。 海洋中大多数鱼类主要以BCF为推进方式来前进,并且这种鱼类通过MPF 万方数据
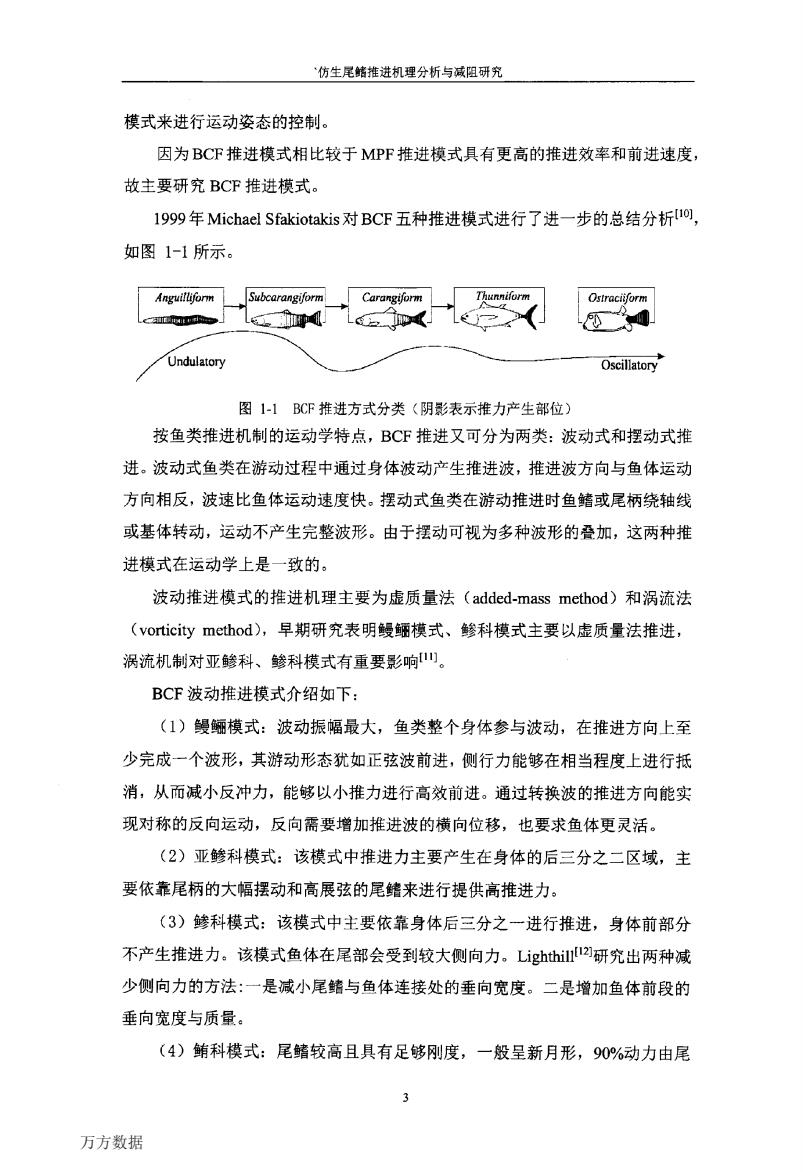
仿生尾储推进机理分析与减阻研究 模式来进行运动姿态的控制。 因为BC℉推进模式相比较于MP℉推进模式具有更高的推进效率和前进速度, 故主要研究BCF推进模式。 l999年Michael Sfakiotakis对BCF五种推进模式进行了进一步的总结分析1o, 如图1-1所示。 Anguilliform Subcarangiform Carangiform Thunniform Ostraciiform w不no 。①中 Undulatory Oscillatory 图1-1BCF推进方式分类(阴影表示推力产生部位) 按鱼类推进机制的运动学特点,BCF推进又可分为两类:波动式和摆动式推 进。波动式鱼类在游动过程中通过身体波动产生推进波,推进波方向与鱼体运动 方向相反,波速比鱼体运动速度快。摆动式鱼类在游动推进时鱼鳍或尾柄绕轴线 或基体转动,运动不产生完整波形。由于摆动可视为多种波形的叠加,这两种推 进模式在运动学上是一致的。 波动推进模式的推进机理主要为虚质量法(added-mass method)和涡流法 (vorticity method),早期研究表明鳗鲡模式、鲹科模式主要以虚质量法推进, 涡流机制对亚鲹科、鲹科模式有重要影响山。 BCF波动推进模式介绍如下: (1)鳗鲡模式:波动振幅最大,鱼类整个身体参与波动,在推进方向上至 少完成一个波形,其游动形态犹如正弦波前进,侧行力能够在相当程度上进行抵 消,从而减小反冲力,能够以小推力进行高效前进。通过转换波的推进方向能实 现对称的反向运动,反向需要增加推进波的横向位移,也要求鱼体更灵活。 (2)亚鲹科模式:该模式中推进力主要产生在身体的后三分之二区域,主 要依靠尾柄的大幅摆动和高展弦的尾鳍来进行提供高推进力。 (3)鲹科模式:该模式中主要依靠身体后三分之一进行推进,身体前部分 不产生推进力。该模式鱼体在尾部会受到较大侧向力。Lighthill1]研究出两种减 少侧向力的方法:一是减小尾鳍与鱼体连接处的垂向宽度。二是增加鱼体前段的 垂向宽度与质量。 (4)鲔科模式:尾鳍较高且具有足够刚度,一般呈新月形,90%动力由尾 3 万方数据
仿生尾鳍推进机理分析与减阻研究 模式来进行运动姿态的控制。 因为BCF推进模式相比较于MPF推进模式具有更高的推进效率和前进速度, 故主要研究BCF推进模式。 1999年Michael Sfakiotakis对BCF五种推进模式进行了进一步的总结分析‘10】, 如图卜1所示。 图1-1 BCF推进方式分类(阴影表示推力产生部位) 按鱼类推进机制的运动学特点,BCF推进又可分为两类:波动式和摆动式推 进。波动式鱼类在游动过程中通过身体波动产生推进波,推进波方向与鱼体运动 方向相反,波速比鱼体运动速度快。摆动式鱼类在游动推进时鱼鳍或尾柄绕轴线 或基体转动,运动不产生完整波形。由于摆动可视为多种波形的叠加,这两种推 进模式在运动学上是一致的。 波动推进模式的推进机理主要为虚质量法(added.mass method)和涡流法 (vorticity method),早期研究表明鳗鲡模式、鳕科模式主要以虚质量法推进, 涡流机制对亚鲣科、鲮科模式有重要影响…]。 BCF波动推进模式介绍如下: (1)鳗鲡模式:波动振幅最大,鱼类整个身体参与波动,在推进方向上至 少完成一个波形,其游动形态犹如正弦波前进,侧行力能够在相当程度上进行抵 消,从而减小反冲力,能够以小推力进行高效前进。通过转换波的推进方向能实 现对称的反向运动,反向需要增加推进波的横向位移,也要求鱼体更灵活。 (2)亚鳇科模式:该模式中推进力主要产生在身体的后三分之二区域,主 要依靠尾柄的大幅摆动和高展弦的尾鳍来进行提供高推进力。 (3)鲣科模式:该模式中主要依靠身体后三分之一进行推进,身体前部分 不产生推进力。该模式鱼体在尾部会受到较大侧向力。Lighthill[121研究出两种减 少侧向力的方法:一是减小尾鳍与鱼体连接处的垂向宽度。二是增加鱼体前段的 垂向宽度与质量。 (4)鲔科模式:尾鳍较高且具有足够刚度,一般呈新月形,90%动力由尾 万方数据
·仿生尾籍推进机理分析与减阻研究 鳍和尾柄附近产生,鱼体呈流线型以大幅降低水阻力,身型和质量分布能有效降 低反冲作用。 1.3鱼类推进机理研究 生物学家对鱼类的研究已经有较长历史。但是从上世纪才开始从力学的角度 解释水生动物游动的机理。本节将主要介绍仿生水下机器人推进机理研究的发展 概况。 国外研究现状 对于鱼类推进机理的研究在上世纪就已经逐渐开始,早期研究以流体惯性力 和粘性力为重点[1)。 1936年,Gry针对海豚游动进行研究,以能量守恒角度提出海豚游动效率 远远超出100%,后人称为“Gray疑题”1.1952年,Taylor采用“静态流体理 论”建立了抗力水动力学模型,着重考虑粘性力,由于忽略流体运动惯性力,只 适合雷诺数较小的情况I)。Hancock在Taylor的基础上,建立了“大摆幅抗力理 论”。 1959年,Taylor建立了研究鱼类游动的“抗力水动力学模型”16。这个方法 是定常方法,运用定常流理论对鱼体某一个时刻的受力进行了计算分析。该方法 对鱼体进行了简化,比较适合用于低雷诺数的情况。 1960年,Lighthill提出了“细长体理论”17。Lighthil通过理论研究提出了 鱼体获得较高效率应该具备的特点。包括波幅应从头部到尾部逐渐变大,并且在 尾部达到最大幅值:波形相位具有正负两种相位值,这样可以用来抵消反作用力: 波速要比游速快。 1961年,吴耀祖通过研究提出“二维波板理论”1),通过将鱼看成一个具 有弹性的薄板,并运用研究机翼的理论对该弹性薄板游动进行分析。 1969年,Lighthill从流体力学和生物学角度对鱼类推进机理进行了研究9。 对游速较快的鱼类的特点进行了比较和总结,得出带有大展弦比月牙形尾鳍的鲹 科模式是具有较高的游速。并采用简化尾鳍模型,对尾鳍进行了水动力分析。 1970年,Lighthill提出了用于分析鳗鲡方式和鲹科模式游动的细长体理论” 2o(elongated--body theory是inviscid slender-body theory的扩展).在研究过程中, 由于鱼体的波动引起的流场变化被简化省去,主要考虑尾鳍的摆动对于流场的影 万方数据
仿生尾鳍推进机理分析与减阻研究 鳍和尾柄附近产生,鱼体呈流线型以大幅降低水阻力,身型和质量分布能有效降 低反冲作用。 1.3鱼类推进机理研究 生物学家对鱼类的研究已经有较长历史。但是从上世纪才开始从力学的角度 解释水生动物游动的机理。本节将主要介绍仿生水下机器人推进机理研究的发展 概况。 国外研究现状 对于鱼类推进机理的研究在上世纪就已经逐渐开始,早期研究以流体惯性力 和粘性力为重点㈣。 1936年,Gray针对海豚游动进行研究,以能量守恒角度提出海豚游动效率 远远超出100%,后人称为“Gray疑题”[14]o 1952年,Taylor采用“静态流体理 论”建立了抗力水动力学模型,着重考虑粘性力,由于忽略流体运动惯性力,只 适合雷诺数较小的情况[”】。Hancock在Taylor的基础上,建立了“大摆幅抗力理 论”。 1959年,Taylor建立了研究鱼类游动的“抗力水动力学模型”[16]。这个方法 是定常方法,运用定常流理论对鱼体某一个时刻的受力进行了计算分析。该方法 对鱼体进行了简化,比较适合用于低雷诺数的情况。 1960年,Lighthill提出了“细长体理论”[17]o Lighthill通过理论研究提出了 鱼体获得较高效率应该具备的特点。包括波幅应从头部到尾部逐渐变大,并且在 尾部达到最大幅值;波形相位具有正负两种相位值,这样可以用来抵消反作用力; 波速要比游速快。 1961年,吴耀祖通过研究提出“二维波板理论”【18],通过将鱼看成一个具 有弹性的薄板,并运用研究机翼的理论对该弹性薄板游动进行分析。 1969年,Lighthill从流体力学和生物学角度对鱼类推进机理进行了研究‘191。 对游速较快的鱼类的特点进行了比较和总结,得出带有大展弦比月牙形尾鳍的鳕 科模式是具有较高的游速。并采用简化尾鳍模型,对尾鳍进行了水动力分析。 1970年,Lighthill提出了用于分析鳗鲡方式和鲮科模式游动的“细长体理论” [20】(elongated-body theory是inviscid slender-body theory的扩展)。在研究过程中, 由于鱼体的波动引起的流场变化被简化省去,主要考虑尾鳍的摆动对于流场的影 d 万方数据
`仿生尾鳍摧进机理分析与减阻研究 响。并通过尾鳍后缘动力学对尾鳍的摆动推力进行计算,获得尾鳍在一个周期内 的平均推力。 1971年,Lighthill对“细长体理论”进行了扩展,提出了分析鱼类推进模式 的“大幅值细长体理论”2](large--amplitude elongated-body theory),以分析鱼类 的规侧和不规则游动。经改进后的该理论更适合尾鳍横向运动较大的参科模式游 动。 1971年,吴耀祖提出了非定常二维波动板理论。该理论分析了扁平月牙尾鱼 类的推进方式,对二维柔性薄板在无粘性流体中变速游动问题进行了研究。 1973年,Newman和吴耀祖在尾流相互影响的基础上改进了细长体理论,更 贴近实际的进行推进机理研究2,23,24。 1977年,Chopra和Kambe又提出了“二维抗力理论”,该理论是1953年 Hancock提出的“大摆幅抗力理论”和1971年Lightill提出的“大摆幅细长体 理论”的补充。该理论研究内容包括推进力的表达和推进力效率的算法,并对尾 鳍攻角和尾鳍摆幅进行了研究25,2。 l979年,Betteridge将准定常升力线理论(quasi-steady lifting--line theory)用于 尾鳍理论计算2)。l979年,Lan用非定常准涡格法(unsteady quasi-vortexlattice method)计算了三维刚性矩形和箭头形翼28]。1980年,Liu和Bose编制了相应的 计算机软件OSFBEM,对尾鳍的推进方式进行了分析研究2判。 20l1年Fabien等将细长体理论进行了推广,使该理论可应用于三维情况, 得出了作用于细长鱼体上的压力表达式和动量表达式B0. 科研人员开始分析涡流对鱼类游动的影响,这主要依靠于数字粒子成像测速 仪技术。1994年,Stamhuis、Videler测量了活体水生动物游动的二维矢量流场, 以此研究分析流场的瞬时流速、加速度和涡量3。之后Triantfyllou等提出“射 流推进理沦”,强调运动鱼体射流对产生推力的作用,以此研制了仿生金枪鱼和 梭鱼。2002年Nauen、Lauder计算得出鲜鱼游动效率的个体差异很小,其平均 推进效率等于74%32。之后通过三维PIV技术的发展以及3D数字成像技术、立 体测速系统等相关技术发展,对涡流的影响出现了大量研究。 C℉D技术的逐渐成熟使得研究者能够对仿真鱼体周围的流场进行数值模拟 分析,并且能够对压力场进行分析,从而不断取得新的研究成果。 万方数据
仿生尾鳍推进机理分析与减阻研究 响。并通过尾鳍后缘动力学对尾鳍的摆动推力进行计算,获得尾鳍在一个周期内 的平均推力。 1971年,Lighthill对“细长体理论”进行了扩展,提出了分析鱼类推进模式 的“大幅值细长体理论”[211(1arge—amplitude elongated.bodytheory),以分析鱼类 的规则和不规则游动。经改进后的该理论更适合尾鳍横向运动较大的鳆科模式游 动。 1971年,吴耀祖提出了非定常二维波动板理论。该理论分析了扁平月牙尾鱼 类的推进方式,对二维柔性薄板在无粘性流体中变速游动问题进行了研究。 1973年,Newman和吴耀祖在尾流相互影响的基础上改进了细长体理论,更 贴近实际的进行推进机理研究[22,23,241。 1977年,Chopra和Kambe又提出了“二维抗力理论”,该理论是1953年 Hancock提出的“大摆幅抗力理论”和1971年Lightill提出的“大摆幅细长体 理论”的补充。该理论研究内容包括推进力的表达和推进力效率的算法,并对尾 鳍攻角和尾鳍摆幅进行了研_字己[25’261。 1979年,Bettefidge将准定常升力线理论(quasi—steady lifting.1ine theory)用于 尾鳍理论计算【27]。1 979年,Lan用非定常准涡格法(unsteady quasi—vortexlaRice method)计算了三维刚性矩形和箭头形翼‘281。1980年,Liu和Bose编制了相应的 计算机软件OSFBEM,对尾鳍的推进方式进行了分析研究【291。 2011年Fabien等将细长体理论进行了推广,使该理论可应用于三维情况, 得出了作用于细长鱼体上的压力表达式和动量表达式‘301。 科研人员开始分析涡流对鱼类游动的影响,这主要依靠于数字粒子成像测速 仪技术。1 994年,Stamhuis、Videler测量了活体水生动物游动的二维矢量流场, 以此研究分析流场的瞬时流速、加速度和涡量【3l】。之后TfiantfyUou等提出“射 流推进理沦”,强调运动鱼体射流对产生推力的作用,以此研制了仿生金枪鱼和 梭鱼。2002年Nauen、Lauder计算得出鲜鱼游动效率的个体差异很小,其平均 推进效率等于74%f321。之后通过三维PIV技术的发展以及3D数字成像技术、立 体测速系统等相关技术发展,对涡流的影响出现了大量研究。 CFD技术的逐渐成熟使得研究者能够对仿真鱼体周围的流场进行数值模拟 分析,并且能够对压力场进行分析,从而不断取得新的研究成果。 万方数据