
第10幸电力电子技术的应用 10.1晶闸管直流电动机系统 10.2变频器和交流调速系统 10.3不间断电源 10.4开关电源 10.5功率因数校正技术 10.6电力电子技术在电力系统中的应用 10.7电力电子技术的其他应用 本章小结 机械电气工程学院电气教研室 电力电子技术
第10章电力电子技术的应用 10.1 晶闸管直流电动机系统 10.2 变频器和交流调速系统 10.3 不间断电源 10.4 开关电源 10.5 功率因数校正技术 10.6 电力电子技术在电力系统中的应用 10.7 电力电子技术的其他应用 本章小结

10.1晶闸管直流电动机系统 10.1.1工作于整流状态时 10.1.2工作于有源逆变状态时 10.1.3直流可逆电力拖动系统 2/70
2/70 10.1 晶闸管直流电动机系统 10.1.1 工作于整流状态时 10.1.2 工作于有源逆变状态时 10.1.3 直流可逆电力拖动系统
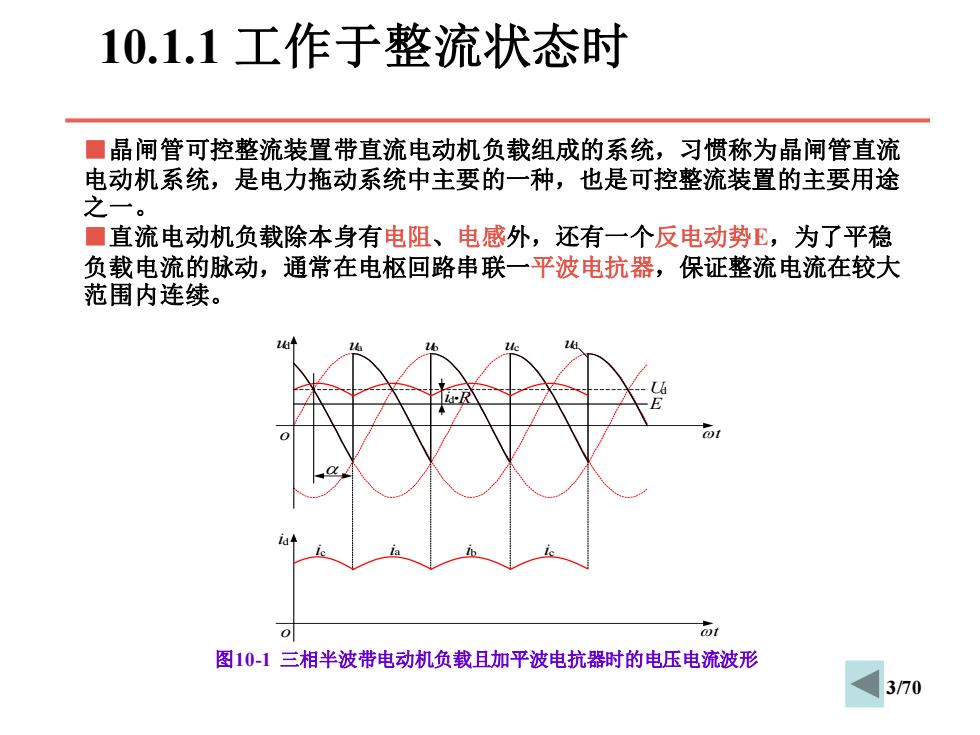
10.1.1工作于整流状态时 ■晶闸管可控整流装置带直流电动机负载组成的系统,习惯称为晶闸管直流 电动机系统,是电力拖动系统中主要的一种,也是可控整流装置的主要用途 之一。 ■直流电动机负载除本身有电阻、电感外,还有一个反电动势E,为了平稳 负载电流的脉动,通常在电枢回路串联一平波电抗器,保证整流电流在较大 范围内连续。 @t 图10-1三相半波带电动机负载且加平波电抗器时的电压电流波形 3/70
3/70 10.1.1 工作于整流状态时 ■晶闸管可控整流装置带直流电动机负载组成的系统,习惯称为晶闸管直流 电动机系统,是电力拖动系统中主要的一种,也是可控整流装置的主要用途 之一。 ■直流电动机负载除本身有电阻、电感外,还有一个反电动势E,为了平稳 负载电流的脉动,通常在电枢回路串联一平波电抗器,保证整流电流在较大 范围内连续。 - 0. 2 0 0. 2 0. 4 0. 6 0. 8 1 E Ud ud ua ub uc ud ic ia ib ic id o o t t id.R 图10-1 三相半波带电动机负载且加平波电抗器时的电压电流波形

10.1.1工作于整流状态时 ■触发晶闸管,待电动机启动达稳态后,由于电动机有较大的机械惯 量,故其转速和反电动势都基本无脉动,此时整流电压的平均值由电 动机的反电动势及电路中负载平均电流I所引起的各种电压降所平衡, 平衡方程为 Ua=EM+R,Ia+△U (10-10 式中,R=R+R,+X,其中R为变压器的等效电阻,Rv为电枢电阻。 3X为重叠角引起的电压降所折合的电阻;△U为晶闸管本身的管压降。 2π ■在电动机负载电路中,电流由负载转矩所决定,当电动机的负载较 轻时,对应的负载电流也小,在小电流情况下,特别在低速时,由于 电感的储能减小,往往不足以维持电流连续,从而出现电流断续现象。 4/70
4/70 10.1.1 工作于整流状态时 2 3X R R R B B M = + + ■触发晶闸管,待电动机启动达稳态后,由于电动机有较大的机械惯 量,故其转速和反电动势都基本无脉动,此时整流电压的平均值由电 动机的反电动势及电路中负载平均电流Id所引起的各种电压降所平衡, 平衡方程为 Ud = EM + R I d + U 式中, ,其中RB为变压器的等效电阻,RM为电枢电阻, 为重叠角引起的电压降所折合的电阻; 为晶闸管本身的管压降。 2 3X B U ■在电动机负载电路中,电流由负载转矩所决定,当电动机的负载较 轻时,对应的负载电流也小,在小电流情况下,特别在低速时,由于 电感的储能减小,往往不足以维持电流连续,从而出现电流断续现象。 (10-1)

10.1.1工作于整流状态时 电流连续时电动机的机械特性 ◆三相半波电流连续时的电动机机械特性 m直流电动机的反电动势为 △L的值一般为1V左右, EM=Cepn (10-2) 所以忽略;调节角,即可 调节电动机的转速。 m因为Ua=1.17U,cos故反电动势特性 方程为 EM=1.17U2 cosa-RId-AU (10-3) m转速与电流的机械特性关系式为 a2 1.17U,cosa R,Ia+△U n= (10-4) a3 a1<a2<a3 Cp 0 m三相桥式全控整流电路电动机负 载时的机械特性方程为 图10-2三相半波电流连续时以 2.34U,c0s0 电流表示的电动机机械特性 n= (10-5) C 5/70
5/70 10.1.1 工作于整流状态时 ■电流连续时电动机的机械特性 ◆三相半波电流连续时的电动机机械特性 ☞直流电动机的反电动势为 EM = Ce n ☞因为 ,故反电动势特性 方程为 Ud = 1.17U2 cos EM = 1.17U2 cos − R I d − U ☞转速与电流的机械特性关系式为 e d e C R I U C U n + = − 1.17 cos 2 RM 3XB + o Id Ce ) n a1 a2 a3 a1< a2 < a3 RB ( + Id ☞三相桥式全控整流电路电动机负 载时的机械特性方程为 d e e I C R C U n = − 2.34 cos 2 图10-2 三相半波电流连续时以 电流表示的电动机机械特性 (10-2) (10-3) (10-4) (10-5) 的值一般为1V左右, 所以忽略;调节角,即可 调节电动机的转速。 U