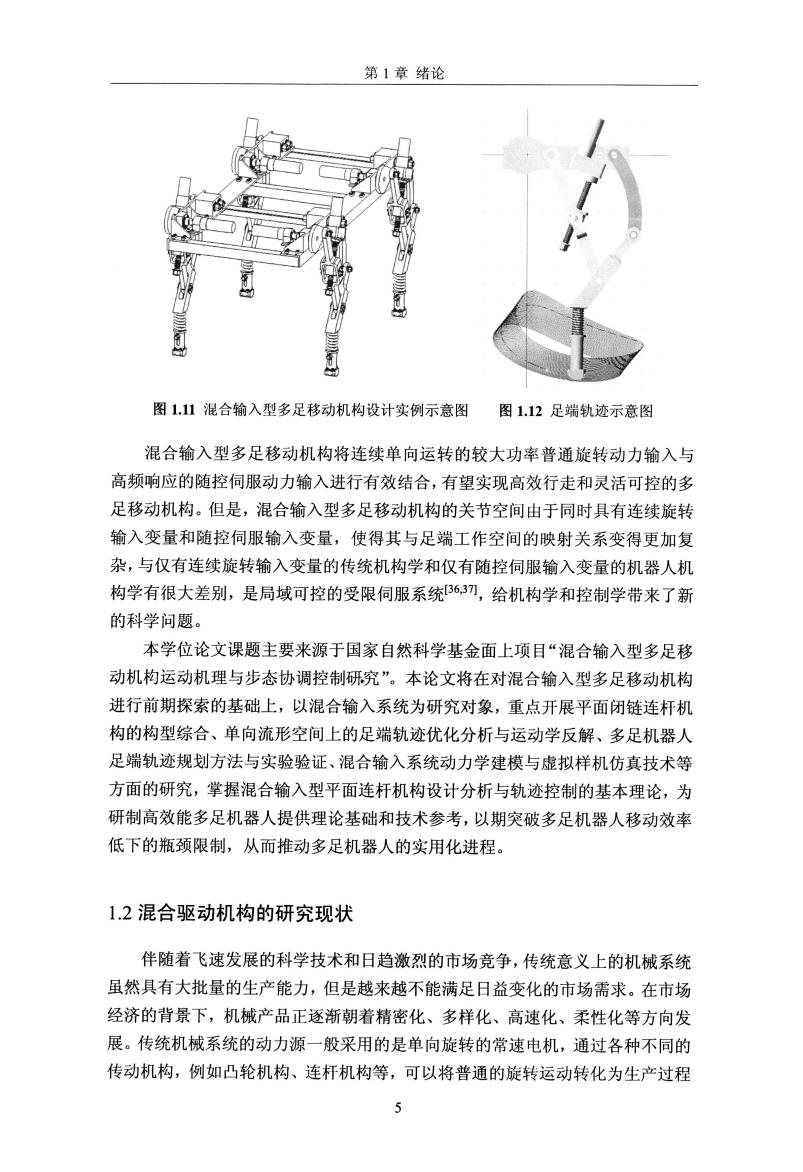
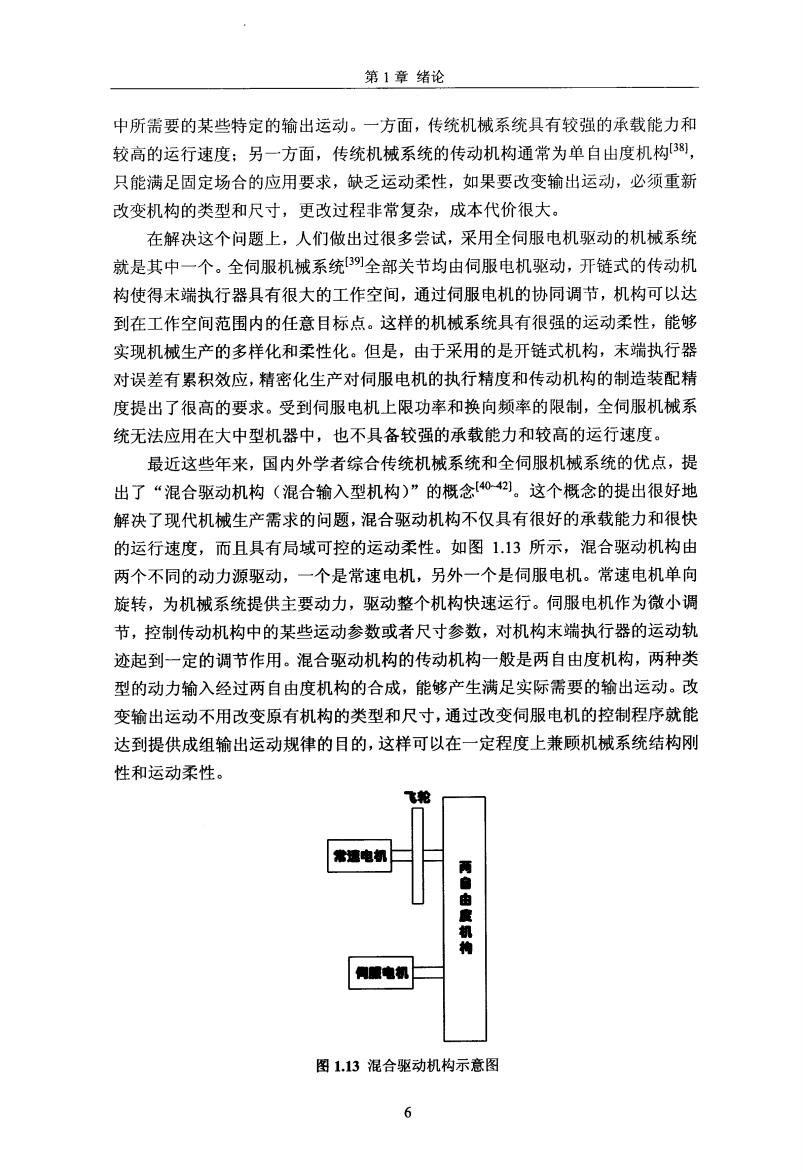
第1章绪论 图1.11混合输入型多足移动机构设计实例示意图 图1.12足端轨迹示意图 混合输入型多足移动机构将连续单向运转的较大功率普通旋转动力输入与 高频响应的随控伺服动力输入进行有效结合,有望实现高效行走和灵活可控的多 足移动机构。但是,混合输入型多足移动机构的关节空间由于同时具有连续旋转 输入变量和随控伺服输入变量,使得其与足端工作空间的映射关系变得更加复 杂,与仅有连续旋转输入变量的传统机构学和仅有随控伺服输入变量的机器人机 构学有很大差别,是局域可控的受限伺服系统36,3刃,给机构学和控制学带来了新 的科学问题。 本学位论文课题主要来源于国家自然科学基金面上项目“混合输入型多足移 动机构运动机理与步态协调控制研究”。本论文将在对混合输入型多足移动机构 进行前期探索的基础上,以混合输入系统为研究对象,重点开展平面闭链连杆机 构的构型综合、单向流形空间上的足端轨迹优化分析与运动学反解、多足机器人 足端轨迹规划方法与实验验证、混合输入系统动力学建模与虚拟样机仿真技术等 方面的研究,掌握混合输入型平面连杆机构设计分析与轨迹控制的基本理论,为 研制高效能多足机器人提供理论基础和技术参考,以期突破多足机器人移动效率 低下的瓶颈限制,从而推动多足机器人的实用化进程。 1.2混合驱动机构的研究现状 伴随着飞速发展的科学技术和日趋激烈的市场竞争,传统意义上的机械系统 虽然具有大批量的生产能力,但是越来越不能满足日益变化的市场需求。在市场 经济的背景下,机械产品正逐渐朝着精密化、多样化、高速化、柔性化等方向发 展。传统机械系统的动力源一般采用的是单向旋转的常速电机,通过各种不同的 传动机构,例如凸轮机构、连杆机构等,可以将普通的旋转运动转化为生产过程 5
第1章绪论 / | 矿。、,. 、,毽妒 图1.11混合输入型多足移动机构设计实例示意图 图1.12足端轨迹示意图 混合输入型多足移动机构将连续单向运转的较大功率普通旋转动力输入与 高频响应的随控伺服动力输入进行有效结合,有望实现高效行走和灵活可控的多 足移动机构。但是,混合输入型多足移动机构的关节空间由于同时具有连续旋转 输入变量和随控伺服输入变量,使得其与足端工作空间的映射关系变得更加复 杂,与仅有连续旋转输入变量的传统机构学和仅有随控伺服输入变量的机器人机 构学有很大差别,是局域可控的受限伺服系统【36,37],给机构学和控制学带来了新 的科学问题。 本学位论文课题主要来源于国家自然科学基金面上项目“混合输入型多足移 动机构运动机理与步态协调控制研究”。本论文将在对混合输入型多足移动机构 进行前期探索的基础上,以混合输入系统为研究对象,重点开展平面闭链连杆机 构的构型综合、单向流形空间上的足端轨迹优化分析与运动学反解、多足机器人 足端轨迹规划方法与实验验证、混合输入系统动力学建模与虚拟样机仿真技术等 方面的研究,掌握混合输入型平面连杆机构设计分析与轨迹控制的基本理论,为 研制高效能多足机器人提供理论基础和技术参考,以期突破多足机器人移动效率 低下的瓶颈限制,从而推动多足机器人的实用化进程。 1.2混合驱动机构的研究现状 伴随着飞速发展的科学技术和日趋激烈的市场竞争,传统意义上的机械系统 虽然具有大批量的生产能力,但是越来越不能满足日益变化的市场需求。在市场 经济的背景下,机械产品正逐渐朝着精密化、多样化、高速化、柔性化等方向发 展。传统机械系统的动力源一般采用的是单向旋转的常速电机,通过各种不同的 传动机构,例如凸轮机构、连杆机构等,可以将普通的旋转运动转化为生产过程 5
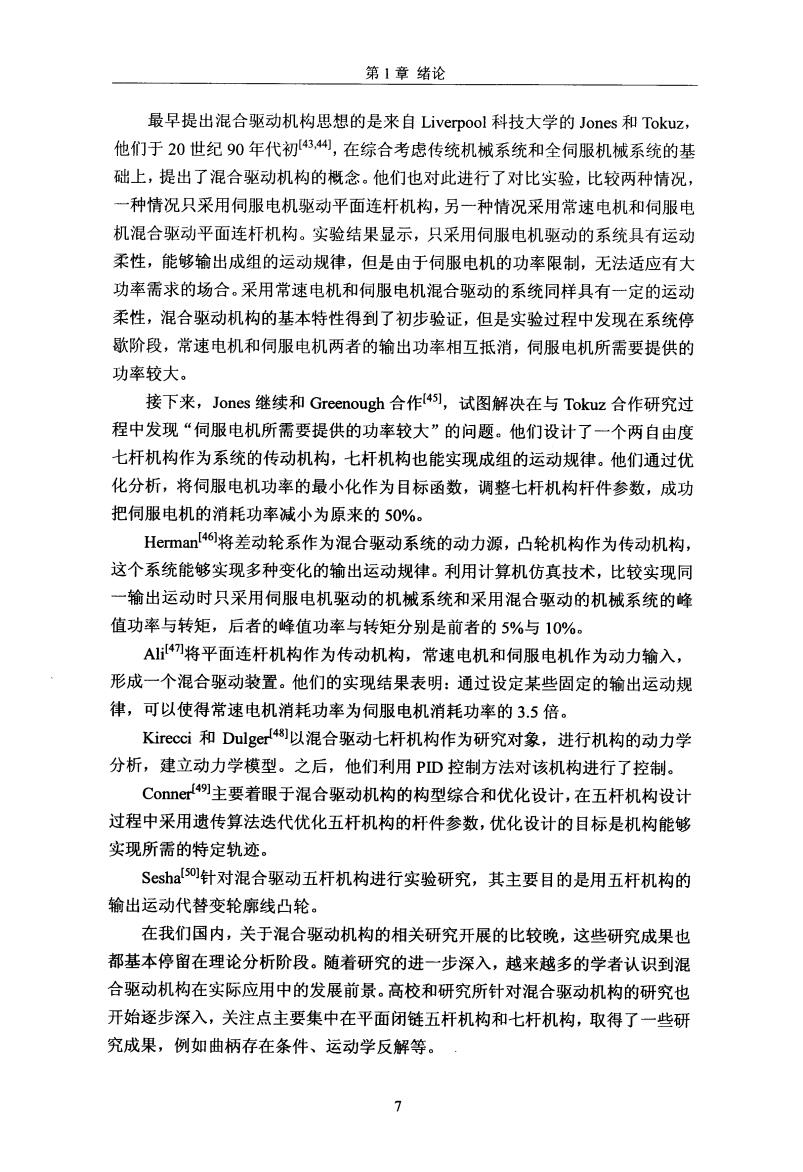
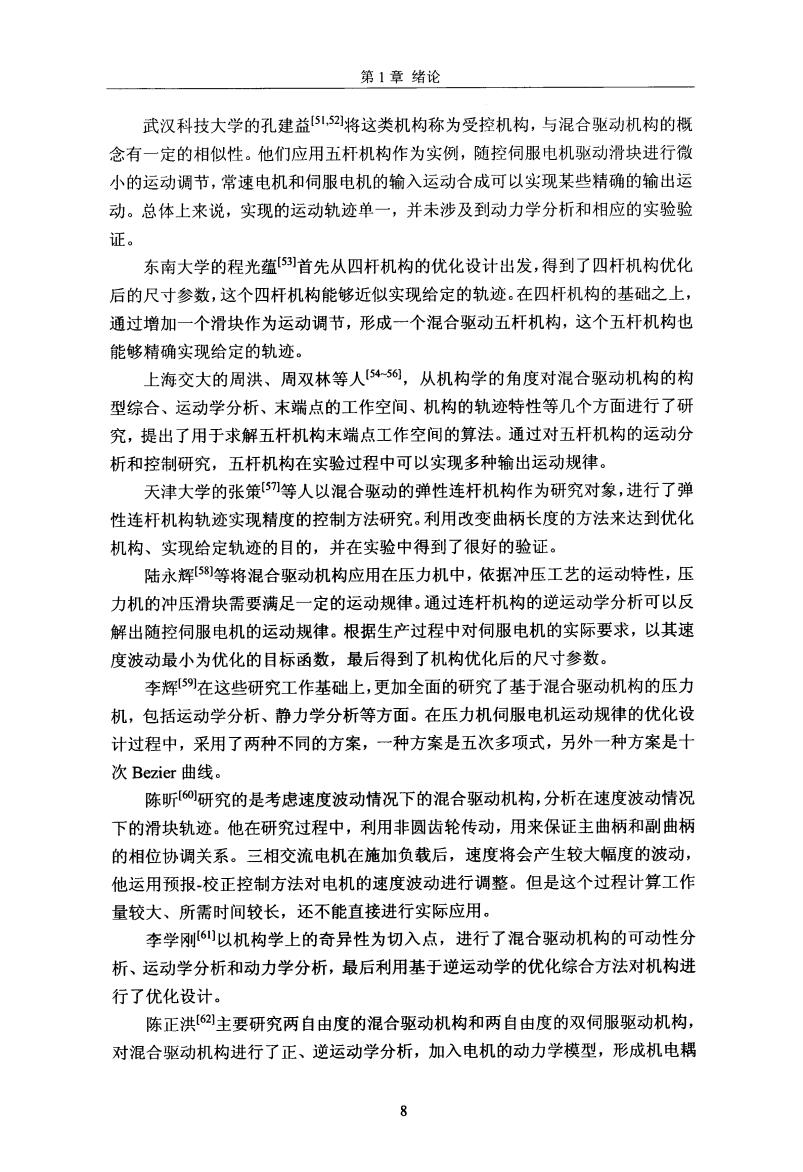
第1章绪论 中所需要的某些特定的输出运动。一方面,传统机械系统具有较强的承载能力和 较高的运行速度:另一方面,传统机械系统的传动机构通常为单自由度机构38, 只能满足固定场合的应用要求,缺乏运动柔性,如果要改变输出运动,必须重新 改变机构的类型和尺寸,更改过程非常复杂,成本代价很大。 在解决这个问题上,人们做出过很多尝试,采用全伺服电机驱动的机械系统 就是其中一个。全伺服机械系统39全部关节均由伺服电机驱动,开链式的传动机 构使得末端执行器具有很大的工作空间,通过伺服电机的协同调节,机构可以达 到在工作空间范围内的任意目标点。这样的机械系统具有很强的运动柔性,能够 实现机械生产的多样化和柔性化。但是,由于采用的是开链式机构,末端执行器 对误差有累积效应,精密化生产对伺服电机的执行精度和传动机构的制造装配精 度提出了很高的要求。受到伺服电机上限功率和换向频率的限制,全伺服机械系 统无法应用在大中型机器中,也不具备较强的承载能力和较高的运行速度。 最近这些年来,国内外学者综合传统机械系统和全伺服机械系统的优点,提 出了“混合驱动机构(混合输入型机构)”的概念042)。这个概念的提出很好地 解决了现代机械生产需求的问题,混合驱动机构不仅具有很好的承载能力和很快 的运行速度,而且具有局域可控的运动柔性。如图1.13所示,混合驱动机构由 两个不同的动力源驱动,一个是常速电机,另外一个是伺服电机。常速电机单向 旋转,为机械系统提供主要动力,驱动整个机构快速运行。伺服电机作为微小调 节,控制传动机构中的某些运动参数或者尺寸参数,对机构末端执行器的运动轨 迹起到一定的调节作用。混合驱动机构的传动机构一般是两自由度机构,两种类 型的动力输入经过两自由度机构的合成,能够产生满足实际需要的输出运动。改 变输出运动不用改变原有机构的类型和尺寸,通过改变伺服电机的控制程序就能 达到提供成组输出运动规律的目的,这样可以在一定程度上兼顾机械系统结构刚 性和运动柔性。 两 由 机 图1.13混合驱动机构示意图
第1章绪论 中所需要的某些特定的输出运动。一方面,传统机械系统具有较强的承载能力和 较高的运行速度;另一方面,传统机械系统的传动机构通常为单自由度机构【3引, 只能满足固定场合的应用要求,缺乏运动柔性,如果要改变输出运动,必须重新 改变机构的类型和尺寸,更改过程非常复杂,成本代价很大。 在解决这个问题上,人们做出过很多尝试,采用全伺服电机驱动的机械系统 就是其中一个。全伺服机械系统【39]全部关节均由伺服电机驱动,开链式的传动机 构使得末端执行器具有很大的工作空间,通过伺服电机的协同调节,机构可以达 到在工作空间范围内的任意目标点。这样的机械系统具有很强的运动柔性,能够 实现机械生产的多样化和柔性化。但是,由于采用的是开链式机构,末端执行器 对误差有累积效应,精密化生产对伺服电机的执行精度和传动机构的制造装配精 度提出了很高的要求。受到伺服电机上限功率和换向频率的限制,全伺服机械系 统无法应用在大中型机器中,也不具备较强的承载能力和较高的运行速度。 最近这些年来,国内外学者综合传统机械系统和全伺服机械系统的优点,提 出了“混合驱动机构(混合输入型机构)’’的概念【4¨引。这个概念的提出很好地 解决了现代机械生产需求的问题,混合驱动机构不仅具有很好的承载能力和很快 的运行速度,而且具有局域可控的运动柔性。如图1.13所示,混合驱动机构由 两个不同的动力源驱动,一个是常速电机,另外一个是伺服电机。常速电机单向 旋转,为机械系统提供主要动力,驱动整个机构快速运行。伺服电机作为微小调 节,控制传动机构中的某些运动参数或者尺寸参数,对机构末端执行器的运动轨 迹起到一定的调节作用。混合驱动机构的传动机构一般是两自由度机构,两种类 型的动力输入经过两自由度机构的合成,能够产生满足实际需要的输出运动。改 变输出运动不用改变原有机构的类型和尺寸,通过改变伺服电机的控制程序就能 达到提供成组输出运动规律的目的,这样可以在一定程度上兼顾机械系统结构刚 性和运动柔性。 11 ■ —— ——] —l—I—Il :二=:::l 再 ■ _- 由 ■ 机 枸 ■●■机 ■_____-●____-‘-●■■■_____一 图1.13混合驱动机构示意图 6
第1章绪论 最早提出混合驱动机构思想的是来自Liverpool科技大学的Jones和Tokuz, 他们于20世纪90年代初3,44),在综合考虑传统机械系统和全伺服机械系统的基 础上,提出了混合驱动机构的概念。他们也对此进行了对比实验,比较两种情况, 一种情况只采用伺服电机驱动平面连杆机构,另一种情况采用常速电机和伺服电 机混合驱动平面连杆机构。实验结果显示,只采用伺服电机驱动的系统具有运动 柔性,能够输出成组的运动规律,但是由于伺服电机的功率限制,无法适应有大 功率需求的场合。采用常速电机和伺服电机混合驱动的系统同样具有一定的运动 柔性,混合驱动机构的基本特性得到了初步验证,但是实验过程中发现在系统停 歇阶段,常速电机和伺服电机两者的输出功率相互抵消,伺服电机所需要提供的 功率较大。 接下来,Jones继续和Greenough合作4,试图解决在与Tokuz合作研究过 程中发现“伺服电机所需要提供的功率较大”的问题。他们设计了一个两自由度 七杆机构作为系统的传动机构,七杆机构也能实现成组的运动规律。他们通过优 化分析,将伺服电机功率的最小化作为目标函数,调整七杆机构杆件参数,成功 把伺服电机的消耗功率减小为原来的50%。 Herman46将差动轮系作为混合驱动系统的动力源,凸轮机构作为传动机构, 这个系统能够实现多种变化的输出运动规律。利用计算机仿真技术,比较实现同 一输出运动时只采用伺服电机驱动的机械系统和采用混合驱动的机械系统的峰 值功率与转矩,后者的峰值功率与转矩分别是前者的5%与10%。 A4切将平面连杆机构作为传动机构,常速电机和伺服电机作为动力输入, 形成一个混合驱动装置。他们的实现结果表明:通过设定某些固定的输出运动规 律,可以使得常速电机消耗功率为伺服电机消耗功率的3.5倍。 Kirecci和Dulger4以混合驱动七杆机构作为研究对象,进行机构的动力学 分析,建立动力学模型。之后,他们利用PD控制方法对该机构进行了控制。 Conner4例主要着眼于混合驱动机构的构型综合和优化设计,在五杆机构设计 过程中采用遗传算法迭代优化五杆机构的杆件参数,优化设计的目标是机构能够 实现所需的特定轨迹。 Seshats0针对混合驱动五杆机构进行实验研究,其主要目的是用五杆机构的 输出运动代替变轮廓线凸轮。 在我们国内,关于混合驱动机构的相关研究开展的比较晚,这些研究成果也 都基本停留在理论分析阶段。随着研究的进一步深入,越来越多的学者认识到混 合驱动机构在实际应用中的发展前景。高校和研究所针对混合驱动机构的研究也 开始逐步深入,关注点主要集中在平面闭链五杆机构和七杆机构,取得了一些研 究成果,例如曲柄存在条件、运动学反解等
第1章绪论 最早提出混合驱动机构思想的是来自Liverpool科技大学的Jones和Tokuz, 他们于20世纪90年代初[43,44],在综合考虑传统机械系统和全伺服机械系统的基 础上,提出了混合驱动机构的概念。他们也对此进行了对比实验,比较两种情况, 一种情况只采用伺服电机驱动平面连杆机构,另一种情况采用常速电机和伺服电 机混合驱动平面连杆机构。实验结果显示,只采用伺服电机驱动的系统具有运动 柔性,能够输出成组的运动规律,但是由于伺服电机的功率限制,无法适应有大 功率需求的场合。采用常速电机和伺服电机混合驱动的系统同样具有一定的运动 柔性,混合驱动机构的基本特性得到了初步验证,但是实验过程中发现在系统停 歇阶段,常速电机和伺服电机两者的输出功率相互抵消,伺服电机所需要提供的 功率较大。 接下来,Jones继续和Greenough合作【4 51,试图解决在与Tokuz合作研究过 程中发现“伺服电机所需要提供的功率较大”的问题。他们设计了一个两自由度 七杆机构作为系统的传动机构,七杆机构也能实现成组的运动规律。他们通过优 化分析,将伺服电机功率的最小化作为目标函数,调整七杆机构杆件参数,成功 把伺服电机的消耗功率减小为原来的50%。 Hemall【46】将差动轮系作为混合驱动系统的动力源,凸轮机构作为传动机构, 这个系统能够实现多种变化的输出运动规律。利用计算机仿真技术,比较实现同 一输出运动时只采用伺服电机驱动的机械系统和采用混合驱动的机械系统的峰 值功率与转矩,后者的峰值功率与转矩分别是前者的5%与10%。 Ali[47]将平面连杆机构作为传动机构,常速电机和伺服电机作为动力输入, 形成一个混合驱动装置。他们的实现结果表明:通过设定某些固定的输出运动规 律,可以使得常速电机消耗功率为伺服电机消耗功率的3.5倍。 Kirecci和Dulgerl4驯以混合驱动七杆机构作为研究对象,进行机构的动力学 分析,建立动力学模型。之后,他们利用PID控制方法对该机构进行了控制。 CoIlIle一49J主要着眼于混合驱动机构的构型综合和优化设计,在五杆机构设计 过程中采用遗传算法迭代优化五杆机构的杆件参数,优化设计的目标是机构能够 实现所需的特定轨迹。 Sesha[50J针对混合驱动五杆机构进行实验研究,其主要目的是用五杆机构的 输出运动代替变轮廓线凸轮。 在我们国内,关于混合驱动机构的相关研究开展的比较晚,这些研究成果也 都基本停留在理论分析阶段。随着研究的进一步深入,越来越多的学者认识到混 合驱动机构在实际应用中的发展前景。高校和研究所针对混合驱动机构的研究也 开始逐步深入,关注点主要集中在平面闭链五杆机构和七杆机构,取得了一些研 究成果,例如曲柄存在条件、运动学反解等。 7
第1章绪论 武汉科技大学的孔建益[51,52]将这类机构称为受控机构,与混合驱动机构的概 念有一定的相似性。他们应用五杆机构作为实例,随控伺服电机驱动滑块进行微 小的运动调节,常速电机和伺服电机的输入运动合成可以实现某些精确的输出运 动。总体上来说,实现的运动轨迹单一,并未涉及到动力学分析和相应的实验验 证。 东南大学的程光蕴5]首先从四杆机构的优化设计出发,得到了四杆机构优化 后的尺寸参数,这个四杆机构能够近似实现给定的轨迹。在四杆机构的基础之上, 通过增加一个滑块作为运动调节,形成一个混合驱动五杆机构,这个五杆机构也 能够精确实现给定的轨迹。 上海交大的周洪、周双林等人45,从机构学的角度对混合驱动机构的构 型综合、运动学分析、末端点的工作空间、机构的轨迹特性等几个方面进行了研 究,提出了用于求解五杆机构末端点工作空间的算法。通过对五杆机构的运动分 析和控制研究,五杆机构在实验过程中可以实现多种输出运动规律。 天津大学的张策[5)等人以混合驱动的弹性连杆机构作为研究对象,进行了弹 性连杆机构轨迹实现精度的控制方法研究。利用改变曲柄长度的方法来达到优化 机构、实现给定轨迹的目的,并在实验中得到了很好的验证。 陆永辉58等将混合驱动机构应用在压力机中,依据冲压工艺的运动特性,压 力机的冲压滑块需要满足一定的运动规律。通过连杆机构的逆运动学分析可以反 解出随控同服电机的运动规律。根据生产过程中对伺服电机的实际要求,以其速 度波动最小为优化的目标函数,最后得到了机构优化后的尺寸参数。 李辉5列在这些研究工作基础上,更加全面的研究了基于混合驱动机构的压力 机,包括运动学分析、静力学分析等方面。在压力机伺服电机运动规律的优化设 计过程中,采用了两种不同的方案,一种方案是五次多项式,另外一种方案是十 次Bezier曲线。 陈昕60研究的是考虑速度波动情况下的混合驱动机构,分析在速度波动情况 下的滑块轨迹。他在研究过程中,利用非圆齿轮传动,用来保证主曲柄和副曲柄 的相位协调关系。三相交流电机在施加负载后,速度将会产生较大幅度的波动, 他运用预报校正控制方法对电机的速度波动进行调整。但是这个过程计算工作 量较大、所需时间较长,还不能直接进行实际应用。 李学刚6以机构学上的奇异性为切入点,进行了混合驱动机构的可动性分 析、运动学分析和动力学分析,最后利用基于逆运动学的优化综合方法对机构进 行了优化设计。 陈正洪[6主要研究两自由度的混合驱动机构和两自由度的双伺服驱动机构, 对混合驱动机构进行了正、逆运动学分析,加入电机的动力学模型,形成机电耦 8
第1章绪论 武汉科技大学的孔建益【51,52】将这类机构称为受控机构,与混合驱动机构的概 念有一定的相似性。他们应用五杆机构作为实例,随控伺服电机驱动滑块进行微 小的运动调节,常速电机和伺服电机的输入运动合成可以实现某些精确的输出运 动。总体上来说,实现的运动轨迹单一,并未涉及到动力学分析和相应的实验验 证。 东南大学的程光蕴【53】首先从四杆机构的优化设计出发,得到了四杆机构优化 后的尺寸参数,这个四杆机构能够近似实现给定的轨迹。在四杆机构的基础之上, 通过增加一个滑块作为运动调节,形成一个混合驱动五杆机构,这个五杆机构也 能够精确实现给定的轨迹。 上海交大的周洪、周双林等人【54~56】,从机构学的角度对混合驱动机构的构 型综合、运动学分析、末端点的工作空间、机构的轨迹特性等几个方面进行了研 究,提出了用于求解五杆机构末端点工作空间的算法。通过对五杆机构的运动分 析和控制研究,五杆机构在实验过程中可以实现多种输出运动规律。 天津大学的张策【57】等人以混合驱动的弹性连杆机构作为研究对象,进行了弹 性连杆机构轨迹实现精度的控制方法研究。利用改变曲柄长度的方法来达到优化 机构、实现给定轨迹的目的,并在实验中得到了很好的验证。 陆永辉【58】等将混合驱动机构应用在压力机中,依据冲压工艺的运动特性,压 力机的冲压滑块需要满足一定的运动规律。通过连杆机构的逆运动学分析可以反 解出随控伺服电机的运动规律。根据生产过程中对伺服电机的实际要求,以其速 度波动最小为优化的目标函数,最后得到了机构优化后的尺寸参数。 李辉【59】在这些研究工作基础上,更加全面的研究了基于混合驱动机构的压力 机,包括运动学分析、静力学分析等方面。在压力机伺服电机运动规律的优化设 计过程中,采用了两种不同的方案,一种方案是五次多项式,另外一种方案是十 次Bezier曲线。 陈时删研究的是考虑速度波动情况下的混合驱动机构,分析在速度波动情况 下的滑块轨迹。他在研究过程中,利用非圆齿轮传动,用来保证主曲柄和副曲柄 的相位协调关系。三相交流电机在施加负载后,速度将会产生较大幅度的波动, 他运用预报.校正控制方法对电机的速度波动进行调整。但是这个过程计算工作 量较大、所需时间较长,还不能直接进行实际应用。 李学刚【6l】以机构学上的奇异性为切入点,进行了混合驱动机构的可动性分 析、运动学分析和动力学分析,最后利用基于逆运动学的优化综合方法对机构进 行了优化设计。 陈正洪【62】主要研究两自由度的混合驱动机构和两自由度的双伺服驱动机构, 对混合驱动机构进行了正、逆运动学分析,加入电机的动力学模型,形成机电耦 8

第1章绪论 合动力学模型。另外,还采用新的迭代控制方法解决主电机的速度波动问题。最 后也对两自出度的双伺服驱动机构进行了相关分析以及实验验证。 综合以上的研究现状,我们能够发现目前国内外己经针对混合驱动机构进行 了大量的相关研究,但是在很多方面的理论还不成熟,并未形成一个完整的理论 体系。 1.3本论文主要内容与结构安排 1.3.1论文主要内容 本论文基于国家自然科学基金面上项目“混合输入型多足移动机构运动机理 与步态协调控制研究”的支持,通过综合比较目前国内外研制的多足机器人,决 定采用混合驱动机构作为多足机器人的腿部机构,以期研制出能够快速移动、具 有一定地形适应能力的多足机器人。根据国内外针对混合驱动机构的研究现状, 不难发现大多数学者选择混合驱动五杆机构作为研究对象,并且对其进行了曲柄 存在条件、工作空间的求解算法、运动学反解、动力学理论建模、给定轨迹的实 验验证等方面的研究。总体上来说,这些研究工作均取得了一定的成果,但是还 并未形成一个完整的理论体系,还有很多方面值得继续进行深入的探索。多足机 器人的实际应用场合对混合驱动机构的构型、工作空间、轨迹特性、动力学特性 等方面都提出了很高的要求。因此,本文以混合驱动机构为研究对象,重点开展 平面闭链连杆机构的构型综合、单向流形空间上的足端轨迹优化分析与运动学反 解、基于混合驱动机构的多足机器人足端轨迹规划方法与实验验证、连杆机构动 力学建模与虚拟样机仿真技术等方面的研究。 1.3.2论文结构安排 本论文主要围绕混合驱动机构在实现高效能多足机器人中的基础理论与关 键技术问题,分别论述了平面闭链连杆机构的构型综合方法、混合驱动机构的位 置分析与尺度优化、两自由度机构的运动学反解与足端轨迹规划研究、连杆机构 动力学理论建模与虚拟仿真技术这四个涉及混合驱动机构结构设计与功能实现 的基础理论和关键技术,按照顺序展开的四个部分研究内容具有并列平行的关 系。 本论文大概的结构安排如下: 第一章为绪论,简单介绍了国内外在多足机器人研究领域的现状,并列举出 几款比较有代表性的多足机器人,之后重点介绍了基于混合驱动机构的多足机器 9
第1章绪论 合动力学模型。另外,还采用新的迭代控制方法解决主电机的速度波动问题。最 后也对两自由度的双伺服驱动机构进行了相关分析以及实验验证。 综合以上的研究现状,我们能够发现目前国内外已经针对混合驱动机构进行 了大量的相关研究,但是在很多方面的理论还不成熟,并未形成一个完整的理论 体系。 1.3本论文主要内容与结构安排 1.3.1论文主要内容 本论文基于国家自然科学基金面上项目“混合输入型多足移动机构运动机理 与步态协调控制研究”的支持,通过综合比较目前国内外研制的多足机器人,决 定采用混合驱动机构作为多足机器人的腿部机构,以期研制出能够快速移动、具 有一定地形适应能力的多足机器人。根据国内外针对混合驱动机构的研究现状, 不难发现大多数学者选择混合驱动五杆机构作为研究对象,并且对其进行了曲柄 存在条件、工作空间的求解算法、运动学反解、动力学理论建模、给定轨迹的实 验验证等方面的研究。总体上来说,这些研究工作均取得了一定的成果,但是还 并未形成一个完整的理论体系,还有很多方面值得继续进行深入的探索。多足机 器人的实际应用场合对混合驱动机构的构型、工作空间、轨迹特性、动力学特性 等方面都提出了很高的要求。因此,本文以混合驱动机构为研究对象,重点开展 平面闭链连杆机构的构型综合、单向流形空间上的足端轨迹优化分析与运动学反 解、基于混合驱动机构的多足机器人足端轨迹规划方法与实验验证、连杆机构动 力学建模与虚拟样机仿真技术等方面的研究。 1.3.2论文结构安排 本论文主要围绕混合驱动机构在实现高效能多足机器人中的基础理论与关 键技术问题,分别论述了平面闭链连杆机构的构型综合方法、混合驱动机构的位 置分析与尺度优化、两自由度机构的运动学反解与足端轨迹规划研究、连杆机构 动力学理论建模与虚拟仿真技术这四个涉及混合驱动机构结构设计与功能实现 的基础理论和关键技术,按照顺序展开的四个部分研究内容具有并列平行的关 系。 本论文大概的结构安排如下: 第一章为绪论,简单介绍了国内外在多足机器人研究领域的现状,并列举出 几款比较有代表性的多足机器人,之后重点介绍了基于混合驱动机构的多足机器 q