日录 3.6本章小结… 46 第4章混合驱动型四足机器人腿部机构的分析与研究…49 4.1引言… 49 4.2腿部机构模型与尺度优化… …49 4.2.1混合驱动型腿部机构模型 …49 4.2.2混合驱动七杆机构的尺度优化…51 4.3七杆机构的工作空间分析… 55 4.3.1调节杆c的长度范围 …55 4.3.2工作空间边界条件和边界曲线构成 …57 4.3.3七杆机构的工作空间… 61 4.4混合驱动七杆机构速度特性分析… 62 4.5七杆机构机电耦合建模与仿真… 69 4.5.1电机的动力学方程 69 4.5.2基于虚拟样机技术的机电耦合仿真 71 4.6特定轨迹分析与实验研究… .73 4.6.1混合驱动机构特定轨迹的实现方法 .73 4.6.2特定轨迹实现方法的实验研究 .75 4.7本章小结… 82 第5章总结与展望 …83 5.1全文总结… …83 5.2研究展望 84 参考文献… …85 在读期间发表的学术论文与取得的研究成果 91 致谢 .93 VIII
目录 3.6本章小结…………………………………………………………………一46 第4章混合驱动型四足机器人腿部机构的分析与研究……………………49 4.1引‘言………………………………………………………………………………………………..49 4.2腿部机构模型与尺度优化………………………………………………..49 4.2.1混合驱动型腿部机构模型…………………………………………49 4.2.2混合驱动七杆机构的尺度优化……………………………………51 4.3七杆机构的工作空间分析………………………………………………..55 4.3.1调节杆C的长度范围………………………………………………55 4.3.2工作空间边界条件和边界曲线构成………………………………57 4.3.3七杆机构的工作空间………………………………………………61 4.4混合驱动七杆机构速度特性分析………………………………………..62 4.5七杆机构机电耦合建模与仿真…………………………………………..69 4.5.1电机的动力学方程…………………………………………………69 4.5.2基于虚拟样机技术的机电耦合仿真………………………………71 4.6特定轨迹分析与实验研究………………………………………………..73 4.6.1混合驱动机构特定轨迹的实现方法………………………………73 4.6.2特定轨迹实现方法的实验研究……………………………………75 4.7本章小结…………………………………………………………………..82 第5章总结与展望……………………………………………………………83 5.1全文总结…………………………………………………………………..83 5.2研究展望…………………………………………………………………..84 参考文献……………………………………………………………………….85 在读期间发表的学术论文与取得的研究成果……………………………….91 致谢……………………………………………………………………………………93 VIII
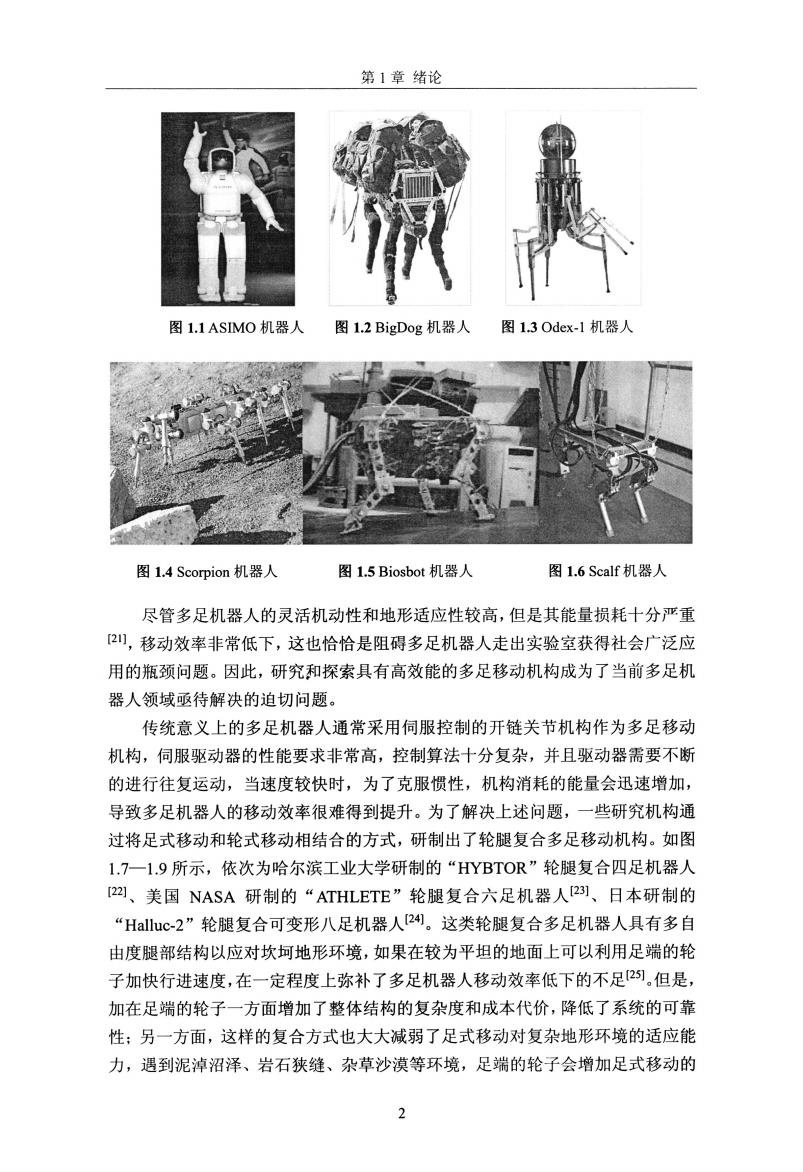
第1章绪论 第1章绪论 1.1选题背景及意义 移动机器人的应用范围正在随着科技的进步迅速扩展,不仅在工业、农业、 服务业、医疗行业广泛应用,更是在诸如公共安全、国防、灾害救援、化学污染 处理、空间探测、海洋探索等方面备受关注。在例如高山丛林作战、荒原湿地考 察、防灾救援排爆等许多应用场合,高度非结构化的地形环境使得传统的轮式机 器人和履带式机器人的应用受到极大限制。基于仿生原理的多足机器人因其具有 更好的灵活机动性、更强的环境适应性,成为移动机器人领域一直以来都备受瞩 目的研究重点和热点[2,]。 半个世纪以来,世界各国学者对各种型式的多足机器人进行了研究,双足、 四足、六足、八足等多足机器人陆续被研制出来4。其中,日本本田公司推出 的“ASMO”仿人型机器人[)(如图1.1所示),行走平稳自如,可实现上下台 阶、弯腰、转身、踢球、舞蹈等多项动作8,)。美国波士顿动力学公司近年来研 制成功的“BigDog”四足机器人10(如图1.2所示),具有根据环境变化实时进 行姿态调整的能力,被誉为“当今世界最先进的适应崎岖地形机器人”。美国 上世纪80年代研制出来的“Odex-1”六足机器人2)(如图1.3所示),有六条沿 圆周布置的多自由度机械腿,能够上下台阶,而且适于狭小空间移动。美国NASA 最近研制的“Scorpion”八足星球探测机器人1)(如图1.4所示),可以爬越岩石 等障碍,足端如果安装执行装置,还可以作为机械臂来使用,进行样本采集等工 作。国内高校和研究所从上世纪80年代开始也相继投入大量人力和物力在多足 机器人的研究上开展了积极的探索,研制出了一大批多足移动机器人。在基础研 究、关键技术和系统集成等方面都取得了一系列研究成果418]。2004年清华大 学研制的“Biosbot'”四足机器人1)(如图1.5所示),可以实现稳定的节律运动, 能够适应复杂的地形条件,完成上下坡、爬越障碍等动作。山东大学机器人研究 中心研制的“Scalf”液压驱动四足仿生机器人2o(如图1.6所示),基于生物仿 生,构造了具有被动结构、液压驱动的四足机器人腿部关节,能够实现平衡的步 行。 1
第1章绪论 1.1选题背景及意义 第1章绪论 移动机器人的应用范围正在随着科技的进步迅速扩展【l】,不仅在工业、农业、 服务业、医疗行业广泛应用,更是在诸如公共安全、国防、灾害救援、化学污染 处理、空间探测、海洋探索等方面备受关注。在例如高山丛林作战、荒原湿地考 察、防灾救援排爆等许多应用场合,高度非结构化的地形环境使得传统的轮式机 器人和履带式机器人的应用受到极大限制。基于仿生原理的多足机器人因其具有 更好的灵活机动性、更强的环境适应性,成为移动机器人领域一直以来都备受瞩 目的研究重点和热剧2’3】。 半个世纪以来,世界各国学者对各种型式的多足机器人进行了研究,双足、 四足、六足、八足等多足机器人陆续被研制出来【¨】。其中,日本本田公司推出 的“ASIMO"仿人型机器人【7】(如图1.1所示),行走平稳自如,可实现上下台 阶、弯腰、转身、踢球、舞蹈等多项动作【8'9】。美国波士顿动力学公司近年来研 制成功的“BigDog”四足机器人【l o】(如图1.2所示),具有根据环境变化实时进 行姿态调整的能力,被誉为“当今世界最先进的适应崎岖地形机器人”…】。美国 上世纪80年代研制出来的“Odex.1”六足机器人【12】(如图1.3所示),有六条沿 圆周布置的多自由度机械腿,能够上下台阶,而且适于狭小空间移动。美国NASA 最近研制的“Scorpion”八足星球探测机器人【l 3】(如图1.4所示>,可以爬越岩石 等障碍,足端如果安装执行装置,还可以作为机械臂来使用,进行样本采集等工 作。国内高校和研究所从上世纪80年代开始也相继投入大量人力和物力在多足 机器人的研究上开展了积极的探索,研制出了一大批多足移动机器人。在基础研 究、关键技术和系统集成等方面都取得了一系列研究成果【14q 81。2004年清华大 学研制的“Biosbot”四足机器人【l川(如图1.5所示),可以实现稳定的节律运动, 能够适应复杂的地形条件,完成上下坡、爬越障碍等动作。山东大学机器人研究 中心研制的“Scalf”液压驱动四足仿生机器人【20】(如图1.6所示),基于生物仿 生,构造了具有被动结构、液压驱动的四足机器人腿部关节,能够实现平衡的步 行
第1章绪论 图1.1ASMO机器人图12 BigDog机器人 图13Odex-1机器人 图1.4 Scorpion机器人 图1.5 Biosbot机器人 图1.6 Scalf机器人 尽管多足机器人的灵活机动性和地形适应性较高,但是其能量损耗十分严重 [2,移动效率非常低下,这也恰恰是阻碍多足机器人走出实验室获得社会广泛应 用的瓶颈问题。因此,研究和探索具有高效能的多足移动机构成为了当前多足机 器人领域亟待解决的迫切问题。 传统意义上的多足机器人通常采用伺服控制的开链关节机构作为多足移动 机构,伺服驱动器的性能要求非常高,控制算法十分复杂,并且驱动器需要不断 的进行往复运动,当速度较快时,为了克服惯性,机构消耗的能量会迅速增加, 导致多足机器人的移动效率很难得到提升。为了解决上述问题,一些研究机构通 过将足式移动和轮式移动相结合的方式,研制出了轮腿复合多足移动机构。如图 1.7一1.9所示,依次为哈尔滨工业大学研制的“YBTOR”轮腿复合四足机器人 [2四、美国NASA研制的“ATHLETE”轮腿复合六足机器人[2I、日本研制的 “Halluc--2”轮腿复合可变形八足机器人24)。这类轮腿复合多足机器人具有多自 由度腿部结构以应对坎坷地形环境,如果在较为平坦的地面上可以利用足端的轮 子加快行进速度,在一定程度上弥补了多足机器人移动效率低下的不足2)。但是, 加在足端的轮子一方面增加了整体结构的复杂度和成本代价,降低了系统的可靠 性:另一方面,这样的复合方式也大大减弱了足式移动对复杂地形环境的适应能 力,遇到泥淖沼泽、岩石狭缝、杂草沙漠等环境,足端的轮子会增加足式移动的 2
第1章绪论 \ 图1.1 ASIMO机器人 图1.2 BigDog机器人 图1.3 Odex.1机器人 图1.4 Scorpion机器人 图1.5 Biosbot机器人 图1.6 Scalf机器人 尽管多足机器人的灵活机动性和地形适应性较高,但是其能量损耗十分严重 [2¨,移动效率非常低下,这也恰恰是阻碍多足机器人走出实验室获得社会广泛应 用的瓶颈问题。因此,研究和探索具有高效能的多足移动机构成为了当前多足机 器人领域亟待解决的迫切问题。 传统意义上的多足机器人通常采用伺服控制的开链关节机构作为多足移动 机构,伺服驱动器的性能要求非常高,控制算法十分复杂,并且驱动器需要不断 的进行往复运动,当速度较快时,为了克服惯性,机构消耗的能量会迅速增加, 导致多足机器人的移动效率很难得到提升。为了解决上述问题,一些研究机构通 过将足式移动和轮式移动相结合的方式,研制出了轮腿复合多足移动机构。如图 1.7—1.9所示,依次为哈尔滨工业大学研制的“HYBTOR”轮腿复合四足机器人 【22】、美国NASA研制的“ATHLETE"轮腿复合六足机器人【23】、日本研制的 “Halluc.2”轮腿复合可变形八足机器人【241。这类轮腿复合多足机器人具有多自 由度腿部结构以应对坎坷地形环境,如果在较为平坦的地面上可以利用足端的轮 子加快行进速度,在一定程度上弥补了多足机器人移动效率低下的不足【2 5I。但是, 加在足端的轮子一方面增加了整体结构的复杂度和成本代价,降低了系统的可靠 性;另一方面,这样的复合方式也大大减弱了足式移动对复杂地形环境的适应能 力,遇到泥淖沼泽、岩石狭缝、杂草沙漠等环境,足端的轮子会增加足式移动的 2 j;、』.j¥ill
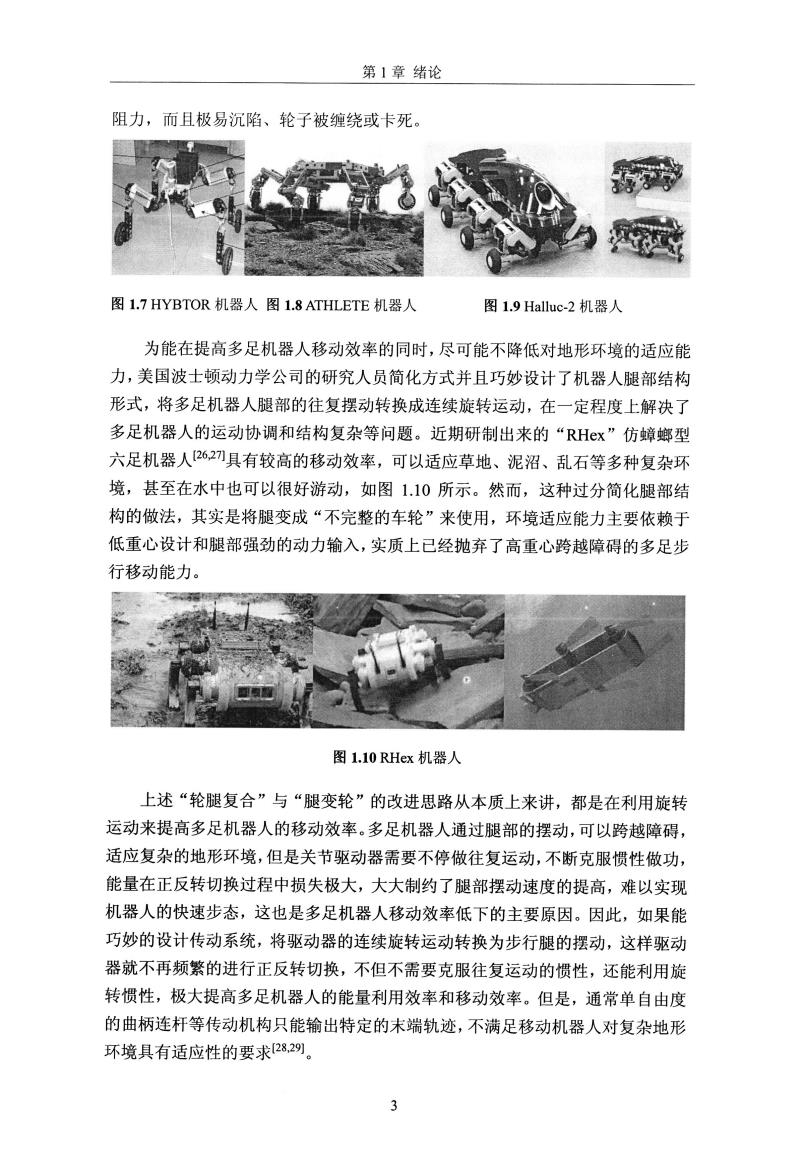
第1章绪论 阻力,而且极易沉陷、轮子被缠绕或卡死。 图1.7 HYBTOR机器人图1.8 ATHLETE机器人 图1.9 Halluc-2机器人 为能在提高多足机器人移动效率的同时,尽可能不降低对地形环境的适应能 力,美国波士顿动力学公司的研究人员简化方式并且巧妙设计了机器人腿部结构 形式,将多足机器人腿部的往复摆动转换成连续旋转运动,在一定程度上解决了 多足机器人的运动协调和结构复杂等问题。近期研制出来的“RHx”仿蟑螂型 六足机器人26,27具有较高的移动效率,可以适应草地、泥沼、乱石等多种复杂环 境,甚至在水中也可以很好游动,如图1.10所示。然而,这种过分简化腿部结 构的做法,其实是将腿变成“不完整的车轮”来使用,环境适应能力主要依赖于 低重心设计和腿部强劲的动力输入,实质上已经抛弃了高重心跨越障碍的多足步 行移动能力。 图1.10RHex机器人 上述“轮腿复合”与“腿变轮”的改进思路从本质上来讲,都是在利用旋转 运动来提高多足机器人的移动效率。多足机器人通过腿部的摆动,可以跨越障碍, 适应复杂的地形环境,但是关节驱动器需要不停做往复运动,不断克服惯性做功, 能量在正反转切换过程中损失极大,大大制约了腿部摆动速度的提高,难以实现 机器人的快速步态,这也是多足机器人移动效率低下的主要原因。因此,如果能 巧妙的设计传动系统,将驱动器的连续旋转运动转换为步行腿的摆动,这样驱动 器就不再频繁的进行正反转切换,不但不需要克服往复运动的惯性,还能利用旋 转惯性,极大提高多足机器人的能量利用效率和移动效率。但是,通常单自由度 的曲柄连杆等传动机构只能输出特定的末端轨迹,不满足移动机器人对复杂地形 环境具有适应性的要求28,29 3
第1章绪论 阻力,而且极易沉陷、轮子被缠绕或卡死。 图1.7 HYBTOR机器人图1.8 ATHLETE机器人 图1.9 Halluc.2机器人 为能在提高多足机器人移动效率的同时,尽可能不降低对地形环境的适应能 力,美国波士顿动力学公司的研究人员简化方式并且巧妙设计了机器人腿部结构 形式,将多足机器人腿部的往复摆动转换成连续旋转运动,在一定程度上解决了 多足机器人的运动协调和结构复杂等问题。近期研制出来的“RHex”仿蟑螂型 六足机器人【2蛇。7】具有较高的移动效率,可以适应草地、泥沼、乱石等多种复杂环 境,甚至在水中也可以很好游动,如图1.10所示。然而,这种过分简化腿部结 构的做法,其实是将腿变成“不完整的车轮"来使用,环境适应能力主要依赖于 低重心设计和腿部强劲的动力输入,实质上已经抛弃了高重心跨越障碍的多足步 行移动能力。 图1.10 RHex机器人 上述“轮腿复合”与“腿变轮”的改进思路从本质上来讲,都是在利用旋转 运动来提高多足机器人的移动效率。多足机器人通过腿部的摆动,可以跨越障碍, 适应复杂的地形环境,但是关节驱动器需要不停做往复运动,不断克服惯性做功, 能量在正反转切换过程中损失极大,大大制约了腿部摆动速度的提高,难以实现 机器人的快速步态,这也是多足机器人移动效率低下的主要原因。因此,如果能 巧妙的设计传动系统,将驱动器的连续旋转运动转换为步行腿的摆动,这样驱动 器就不再频繁的进行正反转切换,不但不需要克服往复运动的惯性,还能利用旋 转惯性,极大提高多足机器人的能量利用效率和移动效率。但是,通常单自由度 的曲柄连杆等传动机构只能输出特定的末端轨迹,不满足移动机器人对复杂地形 环境具有适应性的要求[28,29]。 3 簿躐
第1章绪论 基于以上考虑,我们在对过去所研制的仿生关节型四足机器人和六足两栖机 器人进行系统的实验测试和理论研究的基础上,提出了“混合输入型多足移动机 构”的设计概念。混合输入型多足移动机构30,3别是一类多自由度机构,由连续单 向旋转的大功率普通动力源与高频响应的随控伺服动力源进行混合驱动。大功率 普通旋转动力带动曲柄整周回转,经过传动机构转换为腿部的步态摆动,为移动 机构的高速行走提供强大动力:随控伺服动力实时调节机构的末端运动轨迹,从 而实现多足机器人的步态控制。 在研制基于混合驱动机构的多足机器人时,我们提出了三点必须满足的基本 条件:(1)GDA原理32。多足机器人需要采用较多的驱动器,因此如何提高步 行中的能量效率和驱动器的运转率显得非常重要。广濑等提出了GDA方法,其 本质在于让多足机器人沿水平方向等速移动躯体时消耗的功率为零。(2)奇异点 发生在腿部机构的空载阶段。根据机械原理3的知识,当从动件的传动角等于0 时,驱动力对从动件的有效回转力矩为0,这个位置就是机构的奇异位置。应用 在多足机器人腿部的混合驱动机构需要实现的一个“抬腿-落腿支撑”过程,支 撑过程中由于足端和地面会产生相当大的摩擦力,如果此时机构处于奇异位置, 维持机构正常运转的驱动力矩将完全超过驱动器的能力上限。因此,在设计这样 的连杆机构时应该保证奇异点发生在空载阶段。(3)尽量设计出既能调节步距, 又能调节重心高度的混合驱动机构。由于是混合驱动,机构具有一定的运动柔性, 能够实现成组的足端轨迹,这些轨迹汇聚成轨迹曲线簇。为了满足多足机器人快 速移动的要求,在高、低速运动过程中,需要设计调节机构让机器人实现重心高 度的调整。当遇到大小不一的障碍物时,机器人迅速对障碍物做出判断,通过伺 服驱动的调节,按照对障碍物的判断重新规划步距,保证能跨过障碍,满足机器 人对越障能力的要求。 如图1.11所示,这是我们目前研究的一个混合输入型多足移动机构的设计 实例343),主要由常速电机带动的曲柄连杆机构和伺服电机驱动的丝杠移动机构 组成。常速电机驱动曲柄连续旋转,可以实现腿部的快速摆动:与曲柄固结的飞 轮主要起到足端离地时的惯性储能作用和足端接地时的缓冲平衡作用,用于抑制 由足-地不连续接触和连杆往复摆动引起的电机转速扰动。伺服驱动的丝杠机构 控制某个连杆的长度,从而改变腿部机构的尺寸特性,实现足端轨迹的实时调节, 足端轨迹及其可调控范围如图1.12所示。 4
第1章绪论 基于以上考虑,我们在对过去所研制的仿生关节型四足机器人和六足两栖机 器人进行系统的实验测试和理论研究的基础上,提出了“混合输入型多足移动机 构”的设计概念。混合输入型多足移动机构【30,31】是一类多自由度机构,由连续单 向旋转的大功率普通动力源与高频响应的随控伺服动力源进行混合驱动。大功率 普通旋转动力带动益柄整周回转,经过传动机构转换为腿部的步态摆动,为移动 机构的高速行走提供强大动力;随控伺服动力实时调节机构的末端运动轨迹,从 而实现多足机器人的步态控制。 在研制基于混合驱动机构的多足机器人时,我们提出了三点必须满足的基本 条件:(1)GDA原理[32】。多足机器人需要采用较多的驱动器,因此如何提高步 行中的能量效率和驱动器的运转率显得非常重要。广濑等提出了GDA方法,其 本质在于让多足机器人沿水平方向等速移动躯体时消耗的功率为零。(2)奇异点 发生在腿部机构的空载阶段。根据机械原理【33】的知识,当从动件的传动角等于0 时,驱动力对从动件的有效回转力矩为0,这个位置就是机构的奇异位置。应用 在多足机器人腿部的混合驱动机构需要实现的一个“抬腿.落腿.支撑"过程,支 撑过程中由于足端和地面会产生相当大的摩擦力,如果此时机构处于奇异位置, 维持机构正常运转的驱动力矩将完全超过驱动器的能力上限。因此,在设计这样 的连杆机构时应该保证奇异点发生在空载阶段。(3)尽量设计出既能调节步距, 又能调节重心高度的混合驱动机构。由于是混合驱动,机构具有一定的运动柔性, 能够实现成组的足端轨迹,这些轨迹汇聚成轨迹曲线簇。为了满足多足机器人快 速移动的要求,在高、低速运动过程中,需要设计调节机构让机器人实现重心高 度的调整。当遇到大小不一的障碍物时,机器人迅速对障碍物做出判断,通过伺 服驱动的调节,按照对障碍物的判断重新规划步距,保证能跨过障碍,满足机器 人对越障能力的要求。 如图1.11所示,这是我们目前研究的一个混合输入型多足移动机构的设计 实例【34,35】,主要由常速电机带动的曲柄连杆机构和伺服电机驱动的丝杠移动机构 组成。常速电机驱动曲柄连续旋转,可以实现腿部的快速摆动;与曲柄固结的飞 轮主要起到足端离地时的惯性储能作用和足端接地时的缓冲平衡作用,用于抑制 由足.地不连续接触和连杆往复摆动引起的电机转速扰动。伺服驱动的丝杠机构 控制某个连杆的长度,从而改变腿部机构的尺寸特性,实现足端轨迹的实时调节, 足端轨迹及其可调控范围如图1.12所示。 4