
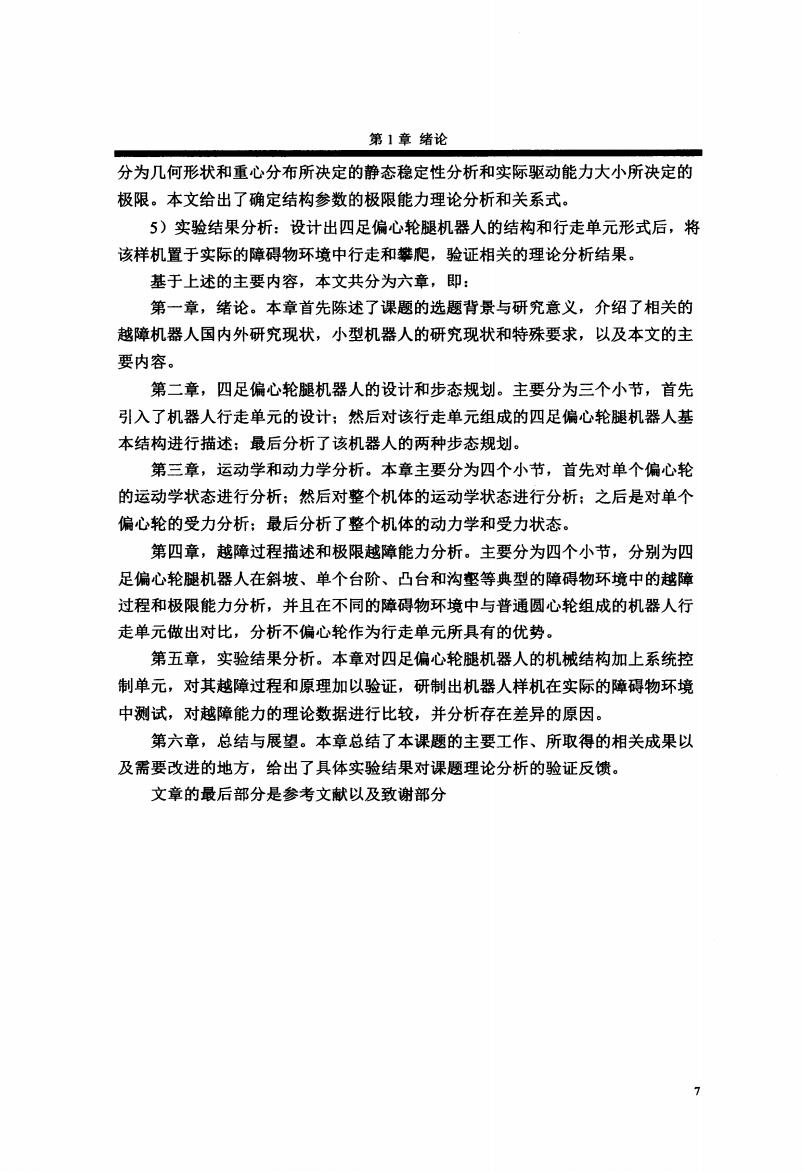
第1章绪论 Ouatroped EAs种h6rm 图1-l】轮腿混合式移动机器人Quarttroped 移动方式,在非规则地形中用半轮式,即腿足式行走方式越过障碍物。西南大学 的偏心轮腿六足机器人ELHR0,1如图1-12所示,采用偏心轮作为行走单元,模 拟六足昆虫的三角步态,具有一定的越障能力和行走效率。 图1-12西南大学偏心轮腿六足机器人ELHR 履带式越障机器人的典型代表有:2011年的日本大地震和海啸之后,日立公 司开发出工业机器人ASTACO-SoRa机器人及其控制台送往福岛第一核电站用于 清洁功能,如图1-13所示,该机器人的功能强大,每个手臂能举起150g的重量, 可伸至2.5m,且机身足够瘦小以通过狭长的通道,横跨为98cm,但是越障高度仅 是8cm的小凸起。大地震后,日本千叶工业大学专家研制的Quince移动机器人配 有四套履带轮,如图1-14所示,部分轮可以上下移动,因此可以绕过障碍物,机 身所携带的摄像机以及红外线和二氧化碳传感器,可以检测被埋在废墟下的幸存 者。 5
第1章绪论 图1.1l轮腿混合式移动机器人Qllarttroped 移动方式,在非规则地形中用半轮式,即腿足式行走方式越过障碍物。西南大学 的偏心轮腿六足机器人EL陬【10,111如图1.12所示,采用偏心轮作为行走单元,模 拟六足昆虫的三角步态,具有一定的越障能力和行走效率。 图1.12西南大学偏心轮腿六足机器人ELHR 履带式越障机器人的典型代表有:2011年的日本大地震和海啸之后,日立公 司开发出工业机器人ASTACO.SoRa机器人及其控制台送往福岛第一核电站用于 清洁功能,如图1.13所示,该机器人的功能强大,每个手臂能举起150Kg的重量, 可伸至2.5m,且机身足够瘦小以通过狭长的通道,横跨为98cm,但是越障高度仅 是8cm的小凸起。大地震后,日本干叶工业大学专家研制的Ouince移动机器人配 有四套履带轮,如图1.14所示,部分轮可以上下移动,因此可以绕过障碍物,机 身所携带的摄像机以及红外线和二氧化碳传感器,可以检测被埋在废墟下的幸存 者
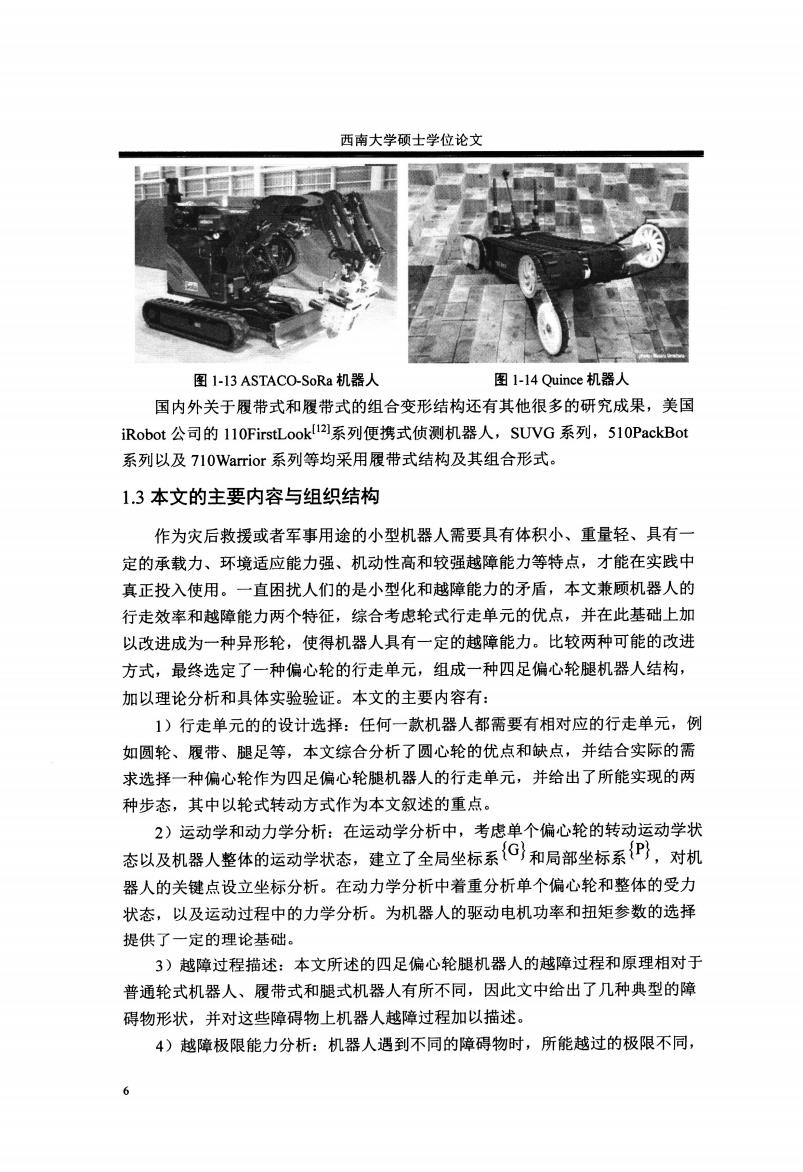
西南大学硕士学位论文 图1-13 ASTACO-SoRa机器人 图1-14 Quince机器人 国内外关于履带式和履带式的组合变形结构还有其他很多的研究成果,美国 Robot公司的110 FirstLook12]系列便携式侦测机器人,SUVG系列,510 PackBot 系列以及7I0 Warrior系列等均采用履带式结构及其组合形式。 1.3本文的主要内容与组织结构 作为灾后救援或者军事用途的小型机器人需要具有体积小、重量轻、具有一 定的承载力、环境适应能力强、机动性高和较强越障能力等特点,才能在实践中 真正投入使用。一直困扰人们的是小型化和越障能力的矛盾,本文兼顾机器人的 行走效率和越障能力两个特征,综合考虑轮式行走单元的优点,并在此基础上加 以改进成为一种异形轮,使得机器人具有一定的越障能力。比较两种可能的改进 方式,最终选定了一种偏心轮的行走单元,组成一种四足偏心轮腿机器人结构, 加以理论分析和具体实验验证。本文的主要内容有: 1)行走单元的的设计选择:任何一款机器人都需要有相对应的行走单元,例 如圆轮、履带、腿足等,本文综合分析了圆心轮的优点和缺点,并结合实际的需 求选择一种偏心轮作为四足偏心轮腿机器人的行走单元,并给出了所能实现的两 种步态,其中以轮式转动方式作为本文叙述的重点。 2)运动学和动力学分析:在运动学分析中,考虑单个偏心轮的转动运动学状 态以及机器人整体的运动学状态,建立了全局坐标系G}和局部坐标系P},对机 器人的关键点设立坐标分析。在动力学分析中着重分析单个偏心轮和整体的受力 状态,以及运动过程中的力学分析。为机器人的驱动电机功率和扭矩参数的选择 提供了一定的理论基础。 3)越障过程描述:本文所述的四足偏心轮腿机器人的越障过程和原理相对于 普通轮式机器人、履带式和腿式机器人有所不同,因此文中给出了几种典型的障 碍物形状,并对这些障碍物上机器人越障过程加以描述。 4)越障极限能力分析:机器人遇到不同的障碍物时,所能越过的极限不同
西南大学硕士学位论文 图1.13 ASTIACO.SoRa机器人 图1.14 0uiIlce机器人 国内外关于履带式和履带式的组合变形结构还有其他很多的研究成果,美国 iR-obot公司的110FirstLook【12】系列便携式侦测机器人,SUVG系列,510Pacl(Bot 系列以及710Wra币or系列等均采用履带式结构及其组合形式。 1.3本文的主要内容与组织结构 作为灾后救援或者军事用途的小型机器人需要具有体积小、重量轻、具有一 定的承载力、环境适应能力强、机动性高和较强越障能力等特点,才能在实践中 真正投入使用。一直困扰人们的是小型化和越障能力的矛盾,本文兼顾机器人的 行走效率和越障能力两个特征,综合考虑轮式行走单元的优点,并在此基础上加 以改进成为一种异形轮,使得机器人具有一定的越障能力。比较两种可能的改进 方式,最终选定了一种偏心轮的行走单元,组成一种四足偏心轮腿机器人结构, 加以理论分析和具体实验验证。本文的主要内容有: 1)行走单元的的设计选择:任何一款机器人都需要有相对应的行走单元,例 如圆轮、履带、腿足等,本文综合分析了圆心轮的优点和缺点,并结合实际的需 求选择一种偏心轮作为四足偏心轮腿机器人的行走单元,并给出了所能实现的两 种步态,其中以轮式转动方式作为本文叙述的重点。 2)运动学和动力学分析:在运动学分析中,考虑单个偏心轮的转动运动学状 态以及机器人整体的运动学状态,建立了全局坐标系1u,和局部坐标系11,,对机 器人的关键点设立坐标分析。在动力学分析中着重分析单个偏心轮和整体的受力 状态,以及运动过程中的力学分析。为机器人的驱动电机功率和扭矩参数的选择 提供了一定的理论基础。 3)越障过程描述:本文所述的四足偏心轮腿机器人的越障过程和原理相对于 普通轮式机器人、履带式和腿式机器人有所不同,因此文中给出了几种典型的障 碍物形状,并对这些障碍物上机器人越障过程加以描述。 4)越障极限能力分析:机器人遇到不同的障碍物时,所能越过的极限不同
第1章绪论 分为几何形状和重心分布所决定的静态稳定性分析和实际驱动能力大小所决定的 极限。本文给出了确定结构参数的极限能力理论分析和关系式。 5)实验结果分析:设计出四足偏心轮腿机器人的结构和行走单元形式后,将 该样机置于实际的障碍物环境中行走和攀爬,验证相关的理论分析结果。 基于上述的主要内容,本文共分为六章,即: 第一章,绪论。本章首先陈述了课题的选题背景与研究意义,介绍了相关的 越障机器人国内外研究现状,小型机器人的研究现状和特殊要求,以及本文的主 要内容。 第二章,四足偏心轮腿机器人的设计和步态规划。主要分为三个小节,首先 引入了机器人行走单元的设计;然后对该行走单元组成的四足偏心轮腿机器人基 本结构进行描述:最后分析了该机器人的两种步态规划。 第三章,运动学和动力学分析。本章主要分为四个小节,首先对单个偏心轮 的运动学状态进行分析:然后对整个机体的运动学状态进行分析:之后是对单个 偏心轮的受力分析:最后分析了整个机体的动力学和受力状态。 第四章,越障过程描述和极限越障能力分析。主要分为四个小节,分别为四 足偏心轮腿机器人在斜坡、单个台阶、凸台和沟壑等典型的障碍物环境中的越障 过程和极限能力分析,并且在不同的障碍物环境中与普通圆心轮组成的机器人行 走单元做出对比,分析不偏心轮作为行走单元所具有的优势。 第五章,实验结果分析。本章对四足偏心轮腿机器人的机械结构加上系统控 制单元,对其越障过程和原理加以验证,研制出机器人样机在实际的障碍物环境 中测试,对越障能力的理论数据进行比较,并分析存在差异的原因。 第六章,总结与展望。本章总结了本课题的主要工作、所取得的相关成果以 及需要改进的地方,给出了具体实验结果对课题理论分析的验证反馈。 文章的最后部分是参考文献以及致谢部分
第1苹绪论 分为几何形状和重心分布所决定的静态稳定性分析和实际驱动能力大小所决定的 极限。本文给出了确定结构参数的极限能力理论分析和关系式。 5)实验结果分析:设计出四足偏心轮腿机器人的结构和行走单元形式后,将 该样机置于实际的障碍物环境中行走和攀爬,验证相关的理论分析结果。 基于上述的主要内容,本文共分为六章,即: 第一章,绪论。本章首先陈述了课题的选题背景与研究意义,介绍了相关的 越障机器人国内外研究现状,小型机器人的研究现状和特殊要求,以及本文的主 要内容。 第二章,四足偏心轮腿机器人的设计和步态规划。主要分为三个小节,首先 引入了机器人行走单元的设计;然后对该行走单元组成的四足偏心轮腿机器人基 本结构进行描述:最后分析了该机器人的两种步态规划。 第三章,运动学和动力学分析。本章主要分为四个小节,首先对单个偏心轮 的运动学状态进行分析;然后对整个机体的运动学状态进行分析;之后是对单个 偏心轮的受力分析;最后分析了整个机体的动力学和受力状态。 第四章,越障过程描述和极限越障能力分析。主要分为四个小节,分别为四 足偏心轮腿机器人在斜坡、单个台阶、凸台和沟壑等典型的障碍物环境中的越障 过程和极限能力分析,并且在不同的障碍物环境中与普通圆心轮组成的机器人行 走单元做出对比,分析不偏心轮作为行走单元所具有的优势。 第五章,实验结果分析。本章对四足偏心轮腿机器人的机械结构加上系统控 制单元,对其越障过程和原理加以验证,研制出机器人样机在实际的障碍物环境 中测试,对越障能力的理论数据进行比较,并分析存在差异的原因。 第六章,总结与展望。本章总结了本课题的主要工作、所取得的相关成果以 及需要改进的地方,给出了具体实验结果对课题理论分析的验证反馈。 文章的最后部分是参考文献以及致谢部分
此页不缺内容

第2章四足偏心轮腿机器人的设计和步态规划 第2章四足偏心轮腿机器人的设计和步态规划 行走单元作为机器人的足和腿直接在地面行走运动,是机器人系统中不可或 缺的一个重要部分,诸如轮式、履带式、腿式、轮履复合式、轮腿复合式等不同 的行走单元决定了机器人的驱动方法、行走步态以及控制方法的不同。本文所述 的基于异形轮组合的小型机器人从行走单元的设计和选择开始分析,为其设计出 合适高效率的运动步态和控制方法。本章首先分析了传统轮式机器人的行走单元 圆心轮的优缺点,进而在此基础上选择一种合适的行走单元模型,设定其基本结 构形式。之后以该行走单元构成一种四足偏心轮腿机器人模型并设计相关行走步 态。 2.1行走单元的设计 2.1.1圆心轮的优缺点 圆心轮的几何特点是轮子的轴心点到轮圈周围各点的轮距相同,如图2-1中 ()部分所示从圆心O到圆周各点的虚线为半径。从运动学角度分析,在平坦的 路面上,圆心轮可以在高速转动的情况下保持轴心点在同一水平线上移动,从而 以圆心轮为行走单元的移动机器人或其他日常交通工具的机械结构体可以高速平 稳地前行;从动力学角度分析,圆心轮轮圈上各点的力矩大小相同,使得它作为 行走单元时容易被驱动。除此之外,圆心轮圆周的各点始终连续性的着地,比轮 腿复合式或者足式结构更有效地利用驱动能源。所以当圆心轮被用于汽车、火车 等交通工具需要高速平稳的苛刻条件时能够极大的表现出它的几何形状优势。然 而在一些非规则结构环境下,例如地震后的废墟、火灾后坍塌现场、矿难发生后 的井下现场等,凹凸不平的地形使得救援侦测类的机器人不需要高速行走,允许 某一个时刻机体有一定的颠簸和倾斜,而最为主要的性能要求是机器人的越障能 力。 圆心轮的缺点是太过单一,圆周各点的力矩大小相同且轴心转动点到各圆周点 的半径相同使机器人越障时没有机会挂在障碍物的棱角上,这就是为何很多轮式 移动机器人很难越过障碍物高度为轮子半径的原因。如果轮式移动机器人遇到障 碍物时,轮子上的驱动力矩和驱动力臂可以根据所要越过的障碍物的形状和高度 适当的变化,则机器人将可以轻松的完成越障任务。 因此,总结圆心轮作为小型机器人越障过程中的行走单元所具有的优缺点,改 进后的行走单元特点可以归纳为:在保留圆心轮的基本机构不变的优点时,能使 得圆周上每个点的扭矩不同,且轮子轴心到圆周上每个点的距离不同。 9
第2章四足偏心轮腿机器人的设计和步态规划 第2章四足偏心轮腿机器人的设计和步态规划 行走单元作为机器入的足和腿直接在地面行走运动,是机器入系统中不可或 缺的一个重要部分,诸如轮式、履带式、腿式、轮履复合式、轮腿复合式等不同 的行走单元决定了机器人的驱动方法、行走步态以及控制方法的不同。本文所述 的基于异形轮组合的小型机器人从行走单元的设计和选择开始分析,为其设计出 合适高效率的运动步态和控制方法。本章首先分析了传统轮式机器人的行走单元 圆心轮的优缺点,进而在此基础上选择一种合适的行走单元模型,设定其基本结 构形式。之后以该行走单元构成一种四足偏心轮腿机器人模型并设计相关行走步 态。 2.1行走单元的设计 2.1.1圆心轮的优缺点 圆心轮的几何特点是轮子的轴心点到轮圈周围各点的轮距相同,如图2.1中 (a)部分所示从圆心0到圆周各点的虚线为半径。从运动学角度分析,在平坦的 路面上,圆心轮可以在高速转动的情况下保持轴心点在同一水平线上移动,从而 以圆心轮为行走单元的移动机器人或其他日常交通工具的机械结构体可以高速平 稳地前行;从动力学角度分析,圆心轮轮圈上各点的力矩大小相同,使得它作为 行走单元时容易被驱动。除此之外,圆心轮圆周的各点始终连续性的着地,比轮 腿复合式或者足式结构更有效地利用驱动能源。所以当圆心轮被用于汽车、火车 等交通工具需要高速平稳的苛刻条件时能够极大的表现出它的几何形状优势。然 而在一些非规则结构环境下,例如地震后的废墟、火灾后坍塌现场、矿难发生后 的井下现场等,凹凸不平的地形使得救援侦测类的机器人不需要高速行走,允许 某一个时刻机体有一定的颠簸和倾斜,而最为主要的性能要求是机器人的越障能 力。 圆心轮的缺点是太过单一,圆周各点的力矩大小相同且轴心转动点到各圆周点 的半径相同使机器人越障时没有机会挂在障碍物的棱角上,这就是为何很多轮式 移动机器人很难越过障碍物高度为轮子半径的原因。如果轮式移动机器人遇到障 碍物时,轮子上的驱动力矩和驱动力臂可以根据所要越过的障碍物的形状和高度 适当的变化,则机器人将可以轻松的完成越障任务。 因此,总结圆心轮作为小型机器人越障过程中的行走单元所具有的优缺点,改 进后的行走单元特点可以归纳为:在保留圆心轮的基本机构不变的优点时,能使 得圆周上每个点的扭矩不同,且轮子轴心到圆周上每个点的距离不同。 9