西南大学硕士学位论文 the obstacle-crossing principle and test the obstacle-crossing performance.Then the reasons why existing difference between experimental results and theoretical model was analyzed at last Through theoretical analysis and experimental study of this subject,quadruped eccentric wheel-legged robot is proved that has both walking efficiency and obstacle-crossing ability advantages.Simultaneously the robot has simple structure and can be easily controlled on the control system level.Rescue workers can carry the robot to the complex terrain after disaster.Actually the robot can cross the obstacle height much larger than the radius of a wheel. Keywords:abnormal wheel,small robots,obstacle-crossing ability,quadruped, eccentric wheel z
西南大学硕士学位论文 廿le obs_t∞le二crossiI培p血ciple and tcst me obstacle-crossillg p晌mance.Th锄廿le reasons、^,!hy eXistillg di氐醯胁ce b舐veeIl eXp矾m%_tal results alld theoretical model was撇lyzed at last. ThroughⅡle删ical analysis and唧emental咖dy of廿1is subject,qu暑IdI呷ed ecc州c wheel-legged robot is p∞vedⅡlat lm boⅡ1 walking e伍ci∞cy锄d obStacle-crossing abil时 adVaIltages.Simultalleo璐ly缸1e robot h雒simple Stru魂聆锄d c锄be锶sily con打oned on nle con仃ol syst锄level.Resc鹏wor叠【erS c锄car哕也e robot to廿le c伽叩l既temiIl after disaSt既Act岫lly me robot can cross me obst∞1e height much 1a唱er血an me均dius of a、jv=I埒e1. Keywords:abnomal wheel, small robots, obs乜Icle-crossing abili吼 quadnJped, ecce砌c wheel Ⅳ

第1章绪论 第1章绪论 1.1选题背景及意义 对于突发性的自然灾害(地震、泥石流、山体坍塌等)、高层建筑物火灾、煤 矿坍塌或者瓦斯爆炸事故、军事侦察以及危害人类生命财产安全事件发生后,靠 人力去搜集信息或者搜救幸存人员存在一定的危险性,并且救援人员和大型教援 机器往往无法靠近现场,因此需要救援人员携带一种便携式、重量轻和越障能力 优越的小型机器人赶赴现场实施救援工作。这些机器人需要具有体积小重量轻的 特点以便于救援人员随身携带至灾难现场,需要有较强的地形适应性,不仅可以 在规整的地面上快速有效地行走,而且具有一定的越障能力。因此,非规整地形 行走的机器人日益得到了国内外众多研究人员的重视,成为了移动机器人领域的 一个充满活力、具有挑战性的前沿发展方向。 轮式运动以其承载力大、速度快且平稳、抗撞击、结构简单和控制容易的优 点成为了最常见的移动方式;而且由于各种尺寸和材料的轮式结构易于获得且价 格便宜,与电动马达的协作也简单易行,从而以轮子为行走机构的移动机器人得 到了广泛的应用。 近年来,为了适应规则地形的快速和有效率的行走,以及在非规整地形中有 效越障的情况,单一的轮式移动机器人不能适应复杂的地形,所以很多研究人员 都是把精力放在基于轮腿组合式、履带式组合的机器人越障分析研究方面。然而 抛弃了轮式行走机构的方法便意味着行走效率的降低以及机器人本体的复杂化。 为了能在行走速度和越障能力方面达到较好的平衡,本课题选择一种类似于 轮子的异形轮作为行走机构,通过选取适当的轮子数量,组合起来。提出相应的 基于异形轮组合的小型机器人平台的架构、越障行走方式以及控制方法,从理论 上分析其越障性能的可行性,并用具体实验来加以验证。 1.2越障机器人概述 国内外关于机器人的定义和分类各有一些不同,国际标准化组织采纳了美国 机器人协会给机器人下的定义:“一种可编程和多功能的操作机:或是为了执行不 同的任务而具有可用电脑改变和可编程动作的专门系统”。机器人的分类有很多 种,中国的机器人专家从应用环境出发,将机器人分为两大类,即工业机器人和 特种机器人。所谓工业机器人就是面向工业领域的多关节机械手或多自由度机器 人。而特种机器人则是除工业机器人之外的且用于非制造业并服务于人类的各种 先进机器人,其中包括:军用机器人、水下机器人、娱乐机器人、服务机器人、 农业机器人等。国际上的一些机器人学者也是从应用环境出发将机器人分为两类: 1
第1章绪论 第1章绪论 1.1选题背景及意义 对于突发性的自然灾害(地震、泥石流、山体坍塌等)、高层建筑物火灾、煤 矿坍塌或者瓦斯爆炸事故、军事侦察以及危害人类生命财产安全事件发生后,靠 人力去搜集信息或者搜救幸存人员存在一定的危险性,并且救援人员和大型救援 机器往往无法靠近现场,因此需要救援人员携带一种便携式、重量轻和越障能力 优越的小型机器人赶赴现场实施救援工作。这些机器人需要具有体积小重量轻的 特点以便于救援人员随身携带至灾难现场,需要有较强的地形适应性,不仅可以 在规整的地面上快速有效地行走,而且具有一定的越障能力。因此,非规整地形 行走的机器人日益得到了国内外众多研究人员的重视,成为了移动机器人领域的 一个充满活力、具有挑战性的前沿发展方向。 轮式运动以其承载力大、速度快且平稳、抗撞击、结构简单和控制容易的优 点成为了最常见的移动方式;而且由于各种尺寸和材料的轮式结构易于获得且价 格便宜,与电动马达的协作也简单易行,从而以轮子为行走机构的移动机器人得 到了广泛的应用。 近年来,为了适应规则地形的快速和有效率的行走,以及在非规整地形中有 效越障的情况,单一的轮式移动机器人不能适应复杂的地形,所以很多研究人员 都是把精力放在基于轮腿组合式、履带式组合的机器人越障分析研究方面。然而 抛弃了轮式行走机构的方法便意味着行走效率的降低以及机器人本体的复杂化。 为了能在行走速度和越障能力方面达到较好的平衡,本课题选择一种类似于 轮子的异形轮作为行走机构,通过选取适当的轮子数量,组合起来。提出相应的 基于异形轮组合的小型机器人平台的架构、越障行走方式以及控制方法,从理论 上分析其越障性能的可行性,并用具体实验来加以验证。 1.2越障机器人概述 国内外关于机器人的定义和分类各有一些不同,国际标准化组织采纳了美国 机器人协会给机器人下的定义:“一种可编程和多功能的操作机;或是为了执行不 同的任务而具有可用电脑改变和可编程动作的专门系统”。机器人的分类有很多 种,中国的机器人专家从应用环境出发,将机器人分为两大类,即工业机器人和 特种机器人。所谓工业机器人就是面向工业领域的多关节机械手或多自由度机器 人。而特种机器人则是除工业机器人之外的且用于非制造业并服务于人类的各种 先进机器人,其中包括:军用机器人、水下机器人、娱乐机器人、服务机器人、 农业机器人等。国际上的一些机器人学者也是从应用环境出发将机器人分为两类:

西南大学硕士学位论文 制造环境下的工业机器人和非制造环境下的服务与仿人型机器人,大体上可以看 作和中国学者的分类一致。然而其中大部分的机器人都属于移动机器人的范畴, 即机器人需要有自己特有的移动执行机构或行走单元,从而在自己的作业空间范 围内移动位置。对于那些在野外复杂地形或灾害现场的杂乱地形等非结构化环境 下工作的机器人,其越障性能具有一定的性能要求,例如军用侦察机器人、救援 救灾机器人、矿井救援侦测机器人、空中机器人(无人机)等。空中机器人不需 要考虑地形的复杂度,凭借旋翼或者滑翔翼的转动在空中飞行,随着科技的发展 越来越多地应用于实际生活中,如航拍、救灾侦测、喷洒农药、派送快件等。澳 大利亚Flirtey公司的Flirtey无人机送快递业务已经进入商用阶段,如图1-1所示, 这种无人机的飞行高度可达122米,并没有配备摄像头,采用激光测距和声纳等 独特的躲避碰撞技术来避开鸟类和建筑物(或者其他异物等),该无人机可以携带 重约2Kg的物品。雅安地震后,中国地震应急搜救中心救援队首次采用三款国产 救援救灾机器人协助展开地震救援工作),其中一款即图1-2所示的旋翼飞行机器 人,该款机器人在救援过程中具有无需起降场地、随时对地起落的特点,通过超 低空近距离飞行勘察受灾情况、探查生命迹象,并在芦山至宝兴公路疏导中发挥 重要作用。其他的两种有可变形搜救机器人和机器人化生命探测仪参加了废墟表 面的搜索任务,为中国地震应急搜救中心的救援工作和灾情评估提供了数据和图 像参数支撑信息。 图1-1澳洲无人机送快递 图1-2雅安地震搜救飞行机器人 飞行机器人也有它的弊端,如续航时间、负载能力、特殊环境像林地杂草丛 等影响机翼或旋翼工作的地方。因此国内外很多研究学者对地面移动机器人的越 障结构做出很多研究和探索,这些机器人的行走单元分为轮式、腿(或足)式、 履带式、滑撬式、螺旋滚筒式、气囊式等),其中前三种应用的最为广泛,并且以 2
西南大学硕士学位论文 制造环境下的工业机器人和非制造环境下的服务与仿人型机器人,大体上可以看 作和中国学者的分类一致。然而其中大部分的机器人都属于移动机器人的范畴, 即机器人需要有自己特有的移动执行机构或行走单元,从而在自己的作业空间范 围内移动位置。对于那些在野外复杂地形或灾害现场的杂乱地形等非结构化环境 下工作的机器人,其越障性能具有一定的性能要求,例如军用侦察机器人、救援 救灾机器人、矿井救援侦测机器人、空中机器人(无人机)等。空中机器人不需 要考虑地形的复杂度,凭借旋翼或者滑翔翼的转动在空中飞行,随着科技的发展 越来越多地应用于实际生活中,如航拍、救灾侦测、喷洒农药、派送快件等。澳 大利亚FI.rtey公司的FI.rtey无人机【1]送快递业务已经进入商用阶段,如图1.1所示, 这种无人机的飞行高度可达122米,并没有配备摄像头,采用激光测距和声纳等 独特的躲避碰撞技术来避开鸟类和建筑物(或者其他异物等),该无人机可以携带 重约2№的物品。雅安地震后,中国地震应急搜救中心救援队首次采用三款国产 救援救灾机器人协助展开地震救援工作【2】,其中一款即图1.2所示的旋翼飞行机器 人,该款机器人在救援过程中具有无需起降场地、随时对地起落的特点,通过超 低空近距离飞行勘察受灾情况、探查生命迹象,并在芦山至宝兴公路疏导中发挥 重要作用。其他的两种有可变形搜救机器人和机器人化生命探测仪参加了废墟表 面的搜索任务,为中国地震应急搜救中心的救援工作和灾情评估提供了数据和图 像参数支撑信息。 图1.1澳洲无人机送快递 图1.2雅安地震搜救飞行机器人 飞行机器人也有它的弊端,如续航时间、负载能力、特殊环境像林地杂草丛 等影响机翼或旋翼工作的地方。因此国内外很多研究学者对地面移动机器人的越 障结构做出很多研究和探索,这些机器人的行走单元分为轮式、腿(或足)式、 履带式、滑撬式、螺旋滚筒式、气囊式等【31,其中前三种应用的最为广泛,并且以 2

第1章绪论 它们为基础的组合形式也较多的被应用在移动机器人越障能力提升的途径中,例 如轮腿式、轮履式、轮腿履式等复合结构形式。轮式机器人由于轮子的圆形几何 特点,在众多越障机器人的行走单元结构的设计选择中一直是首选,轮子的数量 从一个到六个甚至更多的组合形式。 轮式越障机器人的典型代表有:以色列拉斐尔公司为军方研制的“铁钳”四 轮移动机器人作为反恐战场上的排爆机器人用于在运距离摧毁路边炸弹以确保安 全。该公司项目陆战项目主管称,“铁钳”微型机器人装备的摄像机和激光指示 器用来定位和指示目标吗,随后发射一种铅笔大小的燃烧火箭弹,在远距离上烧 毁路边炸弹,如图1-3所示。中国探月工程的月球车玉兔号如图1-4所示,该机器 人采用六轮摇臂式行走结构,该机器人样机设计尺寸为长1.5m,宽1m,高1.1m, 重140Kg,设计爬坡角度为20度,越障高度20cm。运用摇臂式行走结构的经典 轮式机器人是美国的“勇气号”火星车,具有良好的越障性能和地形适应能力如 图1-5所示。国内国防科技大学有一款内部驱动的行星轮系移动机器人),相对于 普通轮式机器人具有大驱动扭矩和必要时的切换越障高度优势,如图1-6所示。 图13以色列“铁钳” 图14玉兔号月球车 图1-5勇气号火星车 图1-6国防科技大学行星轮机器人 除此之外,还有美国宇航局喷气推进实验室设计的Blueover和Robby机器人, 以及前苏联的月球车Lunokhod1和Lunokhod1,美国的阿波罗系列月球车 Apollo15至17系列,以及火星探测机器人“机遇号”等。 腿或足式越障机器人的典型代表有:由美国Boston Dynamics公司仿造四足动 3
第1章绪论 它们为基础的组合形式也较多的被应用在移动机器人越障能力提升的途径中,例 如轮腿式、轮履式、轮腿履式等复合结构形式。轮式机器人由于轮子的圆形几何 特点,在众多越障机器人的行走单元结构的设计选择中一直是首选,轮子的数量 从一个到六个甚至更多的组合形式。 轮式越障机器人的典型代表有:以色列拉斐尔公司为军方研制的“铁钳”四 轮移动机器人作为反恐战场上的排爆机器人用于在运距离摧毁路边炸弹以确保安 全。该公司项目陆战项目主管称,“铁钳”微型机器人【4l装备的摄像机和激光指示 器用来定位和指示目标吗,随后发射一种铅笔大小的燃烧火箭弹,在远距离上烧 毁路边炸弹,如图1.3所示。中国探月工程的月球车玉兔号如图1.4所示,该机器 人采用六轮摇臂式行走结构,该机器人样机设计尺寸为长1.5m,宽1m,高1.1m, 重140Kg,设计爬坡角度为20度,越障高度20cm。运用摇臂式行走结构的经典 轮式机器人是美国的“勇气号”火星车,具有良好的越障性能和地形适应能力如 图1.5所示。国内国防科技大学有一款内部驱动的行星轮系移动机器人【5】’相对于 普通轮式机器人具有大驱动扭矩和必要时的切换越障高度优势,如图1.6所示。 羹 ”。2i举霉o 。■q‰t 囊 蠢 图1.3以色列“铁钳” 图1-4玉兔号月球车 图1-5勇气号火星车 图1.6国防科技大学行星轮机器人 除此之外,还有美国宇航局喷气推进实验室设计的Blueover和Robby机器人, 以及前苏联的月球车Lunol(hod l和Lunol(hod l,美国的阿波罗系列月球车 Apollol5至17系列,以及火星探测机器人“机遇号”等。 腿或足式越障机器人的典型代表有:由美国Boston Dyn锄ics公司仿造四足动
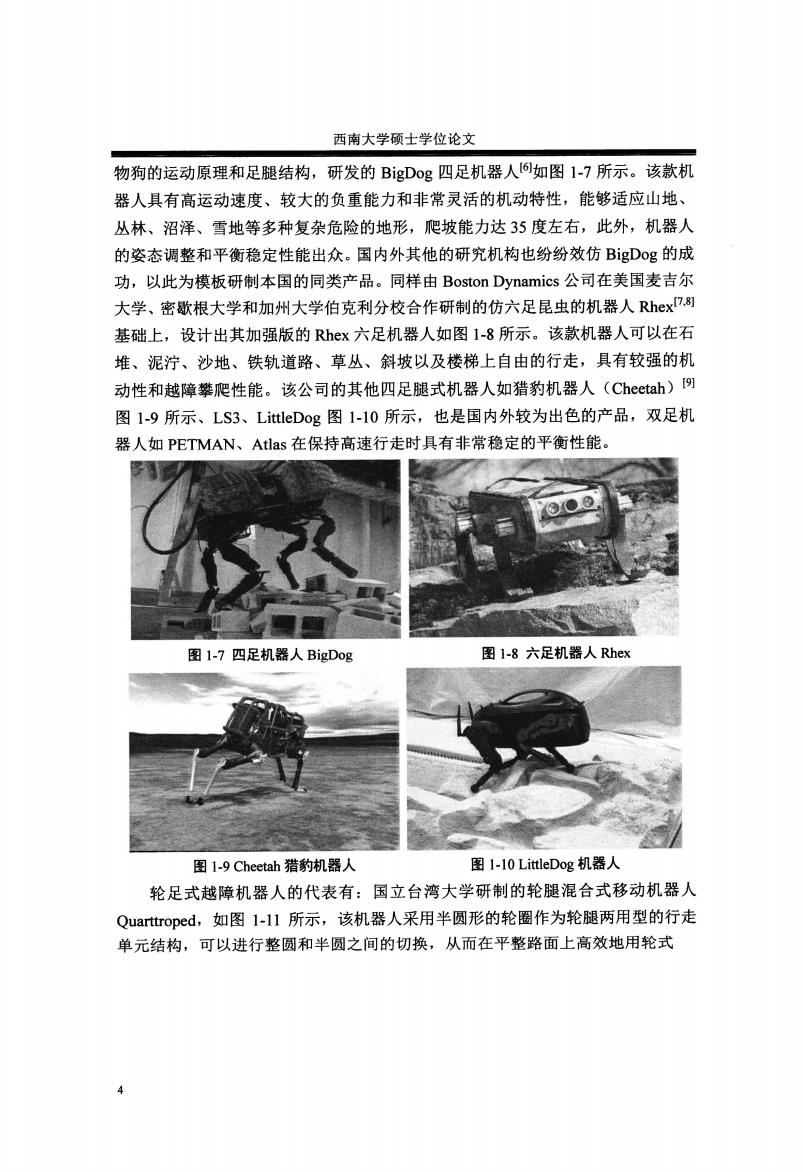
西南大学硕士学位论文 物狗的运动原理和足腿结构,研发的BgD0g四足机器人如图1-7所示。该款机 器人具有高运动速度、较大的负重能力和非常灵活的机动特性,能够适应山地、 丛林、沼泽、雪地等多种复杂危险的地形,爬坡能力达35度左右,此外,机器人 的姿态调整和平衡稳定性能出众。国内外其他的研究机构也纷纷效仿BgD0g的成 功,以此为模板研制本国的同类产品。同样由Boston Dynamics公司在美国麦吉尔 大学、密歇根大学和加州大学伯克利分校合作研制的仿六足昆虫的机器人Rhex7,] 基础上,设计出其加强版的Rhex六足机器人如图1-8所示。该款机器人可以在石 堆、泥泞、沙地、铁轨道路、草丛、斜坡以及楼梯上自由的行走,具有较强的机 动性和越障攀爬性能。该公司的其他四足腿式机器人如猎豹机器人(Cheetah)[) 图1-9所示、LS3、LittleDog图1-10所示,也是国内外较为出色的产品,双足机 器人如PETMAN、Atlas在保持高速行走时具有非常稳定的平衡性能。 图1-7四足机器人BigDog 图1-8六足机器人Rhex 图l-9 Cheetah猎豹机器人 图1-l0 LittleDog机器人 轮足式越障机器人的代表有:国立台湾大学研制的轮腿混合式移动机器人 Quarttroped,如图l-11所示,该机器人采用半圆形的轮圈作为轮腿两用型的行走 单元结构,可以进行整圆和半圆之间的切换,从而在平整路面上高效地用轮式
西南大学硕士学位论文 物狗的运动原理和足腿结构,研发的BigDog四足机器人【6】如图1。7所示。该款机 器人具有高运动速度、较大的负重能力和非常灵活的机动特性,能够适应山地、 丛林、沼泽、雪地等多种复杂危险的地形,爬坡能力达35度左右,此外,机器人 的姿态调整和平衡稳定性能出众。国内外其他的研究机构也纷纷效仿BigDog的成 功,以此为模板研制本国的同类产品。同样由Boston Dyn锄ics公司在美国麦吉尔 大学、密歇根大学和加州大学伯克利分校合作研制的仿六足昆虫的机器人Imex【7岿J 基础上,设计出其加强版的l孙ex六足机器人如图1.8所示。该款机器人可以在石 堆、泥泞、沙地、铁轨道路、草丛、斜坡以及楼梯上自由的行走,具有较强的机 动性和越障攀爬性能。该公司的其他四足腿式机器人如猎豹机器人(Cheetah)例 图1.9所示、LS3、LittleDog图1.10所示,也是国内外较为出色的产品,双足机 器人如PETMAN、Atlas在保持高速行走时具有非常稳定的平衡性能。 图l。7四足机器人BigDog 鬻j搿’鬻l箨熬罄 … Ⅵ。 图1.8六足机器人Rhex 图1.9 Che鲍lll猎豹机器人 图1.10 Li牡leDog机器人 轮足式越障机器人的代表有:国立台湾大学研制的轮腿混合式移动机器人 Quarttroped,如图1.1l所示,该机器人采用半圆形的轮圈作为轮腿两用型的行走 单元结构,可以进行整圆和半圆之间的切换,从而在平整路面上高效地用轮式