水上 漂 发展所面临的问题 薛郭子恺
发 展 所 面 临 的 问 题 薛 郭 子 恺 水 上 漂
TVC 仿生机械水黾研究需待解决的问题:
TVC 仿生机械水黾研究需待解决的问题:
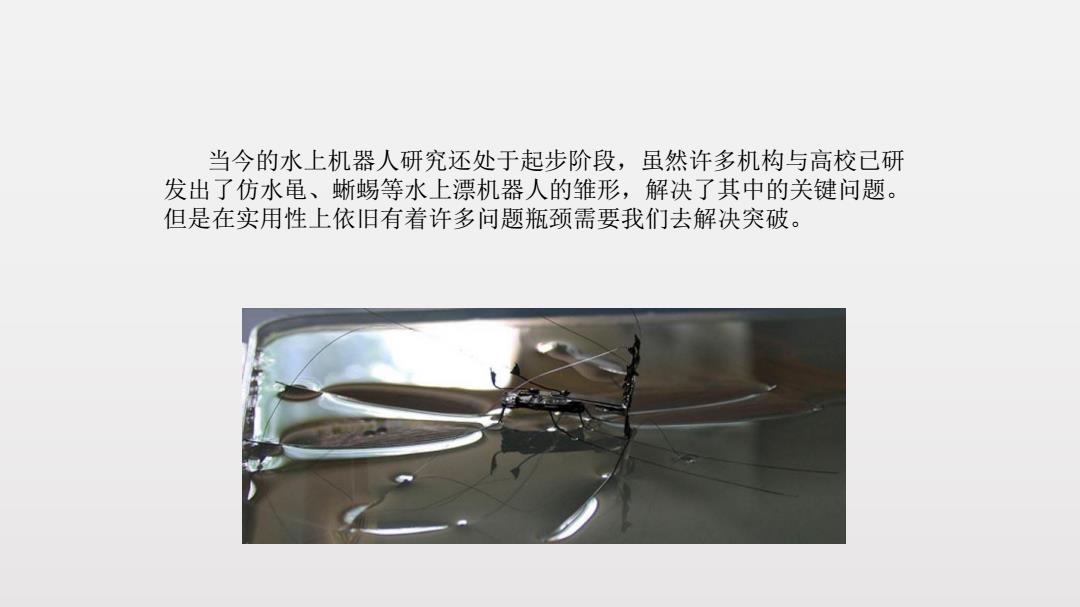
当今的水上机器人研究还处于起步阶段,虽然许多机构与高校已研 发出了仿水黾、蜥蜴等水上漂机器人的维形,解决了其中的关键问题。 但是在实用性上依旧有着许多问题瓶颈需要我们去解决突破
当今的水上机器人研究还处于起步阶段,虽然许多机构与高校已研 发出了仿水黾、蜥蜴等水上漂机器人的雏形,解决了其中的关键问题。 但是在实用性上依旧有着许多问题瓶颈需要我们去解决突破
01 自身问题 02外部因素
01 自身问题 02 外部因素
自身问题 1.承载力问题 未来仿生机器人在水面上行走工作将随身携带各种器件,所以需要具有较大的承 载力和承载空间,而由于普通漂浮物的漂浮力增加,其重量也会随着增加,所以漂浮 机构的设计是机器人设计的重点问题,关系到机器人的承载能力。 2.控制问题 机器人结构较小,控制系统不但要满足本身运动控制而且要满足各种负载控制, 以实现各种功能,所以对控制系统的设计提出较高的要求,不但结构简单而且所需要 的控制器件要少。 同时,要对设计的机器人整体和运动部分进行模态分析,获得本身固有频率和振 型,避免共振发生和改进结构薄弱部位
自身问题 1.承载力问题 未来仿生机器人在水面上行走工作将随身携带各种器件,所以需要具有较大的承 载力和承载空间,而由于普通漂浮物的漂浮力增加,其重量也会随着增加,所以漂浮 机构的设计是机器人设计的重点问题,关系到机器人的承载能力。 2.控制问题 机器人结构较小,控制系统不但要满足本身运动控制而且要满足各种负载控制, 以实现各种功能,所以对控制系统的设计提出较高的要求,不但结构简单而且所需要 的控制器件要少。 同时,要对设计的机器人整体和运动部分进行模态分析,获得本身固有频率和振 型,避免共振发生和改进结构薄弱部位