第8卷第2期 智能系统学报 Vol.8 No.2 2013年4月 CAAI Transactions on Intelligent Systems Apr.2013 D0I:10.3969/i.issn.16734785.201211031 网络出版t地址:htp://www.cnki.net/kcma/detail/23.1538.TP.20130401.1649.001.html 基于模糊规则和动态蚁群-贝叶斯网络的 无人作战飞机态势评估 段海滨,马冠军2,赵振宇3 (1.北京航空航天大学自动化科学与电气工程学院,北京100191;2.北京航天自动控制研究所,北京100854; 3.光电控制技术重,点实验室,河南洛阳471009) 摘要:为解决无人作战飞机复杂环境下的态势评估难题,阐述了蚁群优化和贝叶斯网络基本原理和数学模型,设 计了一种基于模糊规则和动态蚁群-贝叶斯网络的无人作战飞机态势评估方法.该方法通过蚁群-贝叶斯网络把不完 备数据转换成完备数据,从而大大简化了学习的复杂度,并保证算法能够向好的结构不断进化.利用模糊逻辑改进 动态蚁群贝叶斯网络算法,引入基于模糊语言和规则的专家经验,结合单值评估结果与概率向量,评价了不同时刻 无人作战飞机的行为能力等级,能够提高态势评估方法的智能性并应用于工程实际.通过仿真实验验证了该方法在 解决复杂作战环境下无人作战飞机态势评估问题时的可行性和有效性。 关键词:无人作战飞机;态势评估:模糊规则:蚁群优化:贝叶斯网络 中图分类号:TP18文献标志码:A文章编号:16734785(2013)02011909 UCAV situation assessment based on fuzzy rules and dynamic ant colony-Bayesian network DUAN Haibin',MA Guanjun2,ZHAO Zhenyu3 (1.School of Automation Science and Electrical Engineering,Beihang University,Beijing 100191,China;2.Beijing Aerospace Au- tomatic Control Institute,Beijing 100854,China;3.Science and Technology on Electro-Optic Control Laboratory,Luoyang 471009, China Abstract:In order to solve the challenging problem of unmanned combat aerial vehicles(UCAV)situation assess- ment in complex environments,based on the introduction of ant colony optimization,Bayesian network and mathe- matical model,a hybrid fuzzy rules and dynamic ant colony-Bayesian network was proposed in efforts to examine the situation assessment of UCAVs.The incomplete data was converted into a complete data packet by using a dynamic ant colony-Bayesian network,which can greatly simplify the complexity of learning,and ensure that the algorithm evolves into good structure.The dynamic ant colony-Bayesian network algorithm was improved by using fuzzy logic. The experts experience was adopted in the form of fuzzy language and rules.The single value assessment results were combined with the probability vector to evaluate the capacity level of UCAVs at different times,increase the intelligence of situation assessment,and practicality of engineering application.A series of experiments verified the feasibility and effectiveness of the proposed hybrid method for situation assessment of UCAVs in the complicated combat environment. Keywords:unmanned combat aerial vehicle (UCAV);situation assessment;fuzzy rules;ant colony optimization; Bayesian network 无人作战飞机(unmanned combat aerival vehi--置操纵的,具有攻击能力和能重复使用的不载人作 cle,UCAV)是利用无线电设备或自备程序控制装 战平台].无人作战飞机在未来战场中具有突出的 收稿日期:2012-11-19.网络出版日期:201304-01. 地位和作用,不仅可应用于智能监控和侦察、诱饵、 基金项目:国家自然科学基金资助项目(61273054,60975072);航空 人工干扰、网点通信,还可对敌进行防空压制、防御 科学基金资助项目(20115151019). 攻击机/巡航导弹、攻击重要目标、进行边境巡逻 通信作者:段海滨.E-mail:hbduan@buaa.edu.cn. 等21.近年来,各国军队对先进无人作战飞机系统
·120 智能系统学报 第8卷 的需求十分旺盛,而我国现有的无人作战飞机装备 贝叶斯网络.文献[13]提出了基于贝叶斯网络的博 和技术能力与先进国家相比具有很大差距.在面向 弈融合态势评估方法,利用博弈论在研究局中人在 未来的战场,以军事应用为目的的新思想、新概念、 冲突与合作问题方面的优势,结合贝叶斯网络的原 新原理的影响下,研究新型无人机系统,特别是无人 理,弥补了传统融合理论在解决多源信息冲突环境 作战系统是必然的趋势 下融合问题的欠缺 在军事应用中,态势评估是对战场上某些环境 蚁群优化算法是一种模拟蚂蚁群体觅食行为的 因素的感知,并进行理解和预测的过程.在复杂多智 仿生智能优化算法4,该算法通过对蚂蚁复杂的社 能体的决策中,行动策略几乎可以根据已完成评估 会行为的研究,提出基于生物信息素的觅食机制,通 的态势自动生成.复杂作战环境下的无人作战飞机 过蚂蚁间的协作来完成寻优过程56.蚁群优化算 态势评估技术是无人作战飞机系统的关键技术之 法的并行性、协同性、自组织性、动态性等特点可满 一,且是一个研究热点,该技术可以提高无人作战飞 足无人作战飞机复杂态势评估的多尺度需求,并能 机的感知决策能力,拓宽无人作战飞机的应用范围, 提高复杂作战环境下无人作战飞机态势评估的效 并极大地提高其协同和作战效率31.无人战斗飞机 率.文献[17]提出用蚁群优化算法的思想来解决合 的态势评估问题通常具有庞大的解空间,基于数学 贝叶斯网络学习,但是仍存在参数设置和局部最优 规划的常规求解方法显得捉襟见肘,而群体智能方 的问题.为了克服蚁群优化的贝叶斯网络学习的缺 法则是一种有前途的发展方向和可行的技术途径. 点,文献[18]提出了一种基于条件独立测试和蚁群 解决战场态势评估需要从不完全、不确定或者 优化贝叶斯网络结构的学习算法,不仅能够利用约 不精确的输入数据和知识库数据中做出合适的推 束知识减小搜索空间,还能将约束知识作为启发性 理,因此,不确定、不完全知识的表示方法和推理过 知识来指引随机搜索过程. 程是实现战场态势评估的关键所在4幻 本文设计了一种用于复杂作战环境下基于模糊 近年来,许多学者对态势评估技术进行了较为系 规则和动态蚁群-贝叶斯网络的无人作战飞机态势 统、深入的研究,并取得了许多阶段性进展51,目前主 评估方法,用于解决大规模的贝叶斯网络学习问题, 要方法有神经网络6、模糊逻辑7、遗传算法⑧1以及 然后利用模糊逻辑对蚁群-贝叶斯网络算法进行改 基于知识的表示和推理等方法.神经网络具有很好的 进,将专家经验输入化为模糊语言和规则的形式,克 自适应能力、自学习、高度线性和非线性映射,主要用 服了单纯使用蚁群-贝叶斯网络的不足,能够很好地 于威胁假定和态势支持的偏好识别,缺点是训练样本 反应无人作战平台的行为能力等级,增加了态势评 的获取存在困难,输出结果难以解释9].而基于知识 估的智能化程度,其工程实用性也得到了很好的提 的表示推理方法是目前使用最多的方法,包括专家系 高.最后,在所开发的软件平台上,对所设计的混合 统、黑板模型、逻辑模板匹配和贝叶斯网络推理等技 方法进行了系列仿真验证, 术1oj 1蚁群优化数学模型 贝叶斯网络是人工智能中非精确知识表达与推 理领域的研究热点,也是解决战场态势评估问题的 模仿蚂蚁的这种行为方式,在求解类似TSP等 有力工具之一.它是一种用网络拓扑结构表示客观 优化问题时,随机定义m只人工蚂蚁的起始点,每 只蚂蚁的状态更新公式如式(1),直到最终到达目 随机事件的因果关系,以贝叶斯概率理论为基础的 不确定性推理方法「.贝叶斯网络的思想符合人类 标点[16.蚂蚁状态转换规则为 [r(e)]2·[nk(t)]日 思考、理解、学习和抽象的过程,且具有很严密的数 学依据和理论基础].根据数据进行贝叶斯网络学 p(t) allowed: SCallowed 习,确定贝叶斯网络结构,是使用贝叶斯网络进行事 0, 其他 件推理的基础.而贝叶斯网络结构的确定是一个 (1) NP-hard问题,智能优化算法是解决NP-hard问题的 式中:allowed,表示蚂蚁个体k下一步所允许选择的 有效途径, 节点,α为信息启发式因子,B为期望启发式因子, 与此同时,现有的贝叶斯网络存在着局限性,即 7(t)为启发函数: 其没有考虑原因节点影响结果节点的滞后时间,从 ni(t)=1/dg. 而只适用于静态分析,并且对主观判断的依赖性也 式中:d,表示边(i,)的代价.每一次迭代中,蚂蚁在 较强,因此有很多学者应用不同的改进策略来完善 各路径上的生物信息素的更新规则为

第2期 段海滨,等:基于模糊规则和动态蚁群-贝叶斯网络的无人作战飞机态势评估 ·121· T(t+1)=(1-p)r(t)+△r(t), 的方法通过遍历搜索来找出全局最优解近年来,研 式中:0<p<1,是蚂蚁产生的生物信息素挥发因子, 究者提出了一些有效的算法来求取贝叶斯网络结构 随着时间的推移,原有信息将会减弱 的全局最优解,但这些算法都必须知道节点次序的条 含a城o. 件限制,使得其不适合求解缺乏完备节点次序的贝叶 △Tg(t)= 斯网络结构.随着随机搜索技术的发展,为解决以上 Q 蚂蚁k经过边(i,); 问题提供了有效并且可行的方法. △r(t)= L 2.3蚊群-贝叶斯网络的打分函数 0,其他. 随着蚁群优化算法框架的渐渐成熟,它也被成 式中:m表示蚁群的总数,Q表示信息素强度,L表 功地应用到很多不同的领域,譬如数据挖掘、机器学 示第k只蚂蚁在一次循环中所走路径的总代价 习、路径规划以及任务分配等,而蚁群-贝叶斯网络 2基于模糊规则和动态蚁群-贝叶斯 则是一种贝叶斯网络学习的打分搜索方法,其中心 思想是利用K,机制作为打分机制].打分机制就 网络的态势评估 是引入相应的打分函数f(G:D),由它来评价每个 2.1贝叶斯网络 候选贝叶斯网络G与数据集D的拟合程度,贝叶斯 贝叶斯网络是一种因果推理网络,其网络结构 网络学习问题就转化为根据打分函数寻找最好的贝 G=(V,E)是一个有向非循环图,E代表节点之间 叶斯网络这一优化问题81.打分函数可以分解为 有向边的集合,定义节点集V={x,2,…,x}.每个 节点:相应的条件分布为P(xIP(x)),P(x)表 G:D)=习P.():W 示:的父节点集.根据贝叶斯公式,所有节点的联 式中:VP,是数据集D中变量x、P(x)取值情 合概率P(x,,…,,)可表示为0 况的统计值。 K2算法的打分机制表达式可表示为 P(x1,x,…,x)=ΠP(x1P()). P(G,D)= 2.2贝叶斯网络学习 (r-1)! 贝叶斯网络的结构反映了在节点之间的概率性 P(C) 的相互联系(相同数据的分配)以及关于有条件的 式中:T:表示数据集中x:可能取值的个数;9:表示 独立性的判断集合9,在过去10年中,人们提出了 父节点取同一组值的个数;N表示x:取第k个值 很多关于贝叶斯网络结构学习的算法.实际上,其具 有2个基本的实现机制。一种方法基于约束[2021), 时,父节点取第j组值的个数;N,=三N表示:取 认为学习过程实为约束满足问题,并且通过测量有 遍所有值时,父节点取第j个值的个数. 条件的独立关系构筑了网络结构;另一种为打分搜 假设先验分布P(G)为相同的,那么打分值只 索方法,将学习问题看作结构优化问题,即用打 取决于数据集当中,和P.(x,)的统计值021.每个 分机制来评价每一个候选网络结构,然后找出得分 节点x:的K2打分值为 最高的网络结构.虽然相比之下前一种方法的实现 f(,P(x):NP)= 较为简单,但是其高阶的测试极为复杂,并且是不可 靠的.此外,学习模型的精确度也很难得到保障,因 含ea+2ew 此,打分搜索方法渐渐成为一种常用的解决贝叶斯 在求解完每个节点的打分值后,贝叶斯网络G 网络学习的方法 对应的K2打分值即为每个节点打分值的总和: 在贝叶斯网络中每个节点的父节点P.(x)= {x:k∈()}仅选自节点序列中在当前节点之前 ,(G:D)=∑f,(,P():WP)= 的节点集,也就是说,①()C{1,2,…,i-1}(i表示 9 (-1)! 当前节点的序号),对每个节点x:,其可能的父节点 集数为2-.此外,当节点次序未知时,一个带有n 2.4蚊群-贝叶斯网络学习机制 个节点的贝叶斯网络的可能结构有2(a-)2种8】 为了用蚁群优化算法构造贝叶斯网络,必须给 在这种情况下,该贝叶斯网络结构的空间复杂度为 出以下定义:一个对问题的合理表述、一个帮助导引 n!2aa-)2).显然,在n很大的情况下很难用打分 蚂蚁的启发信息?、一种更新路径信息素T:的方法
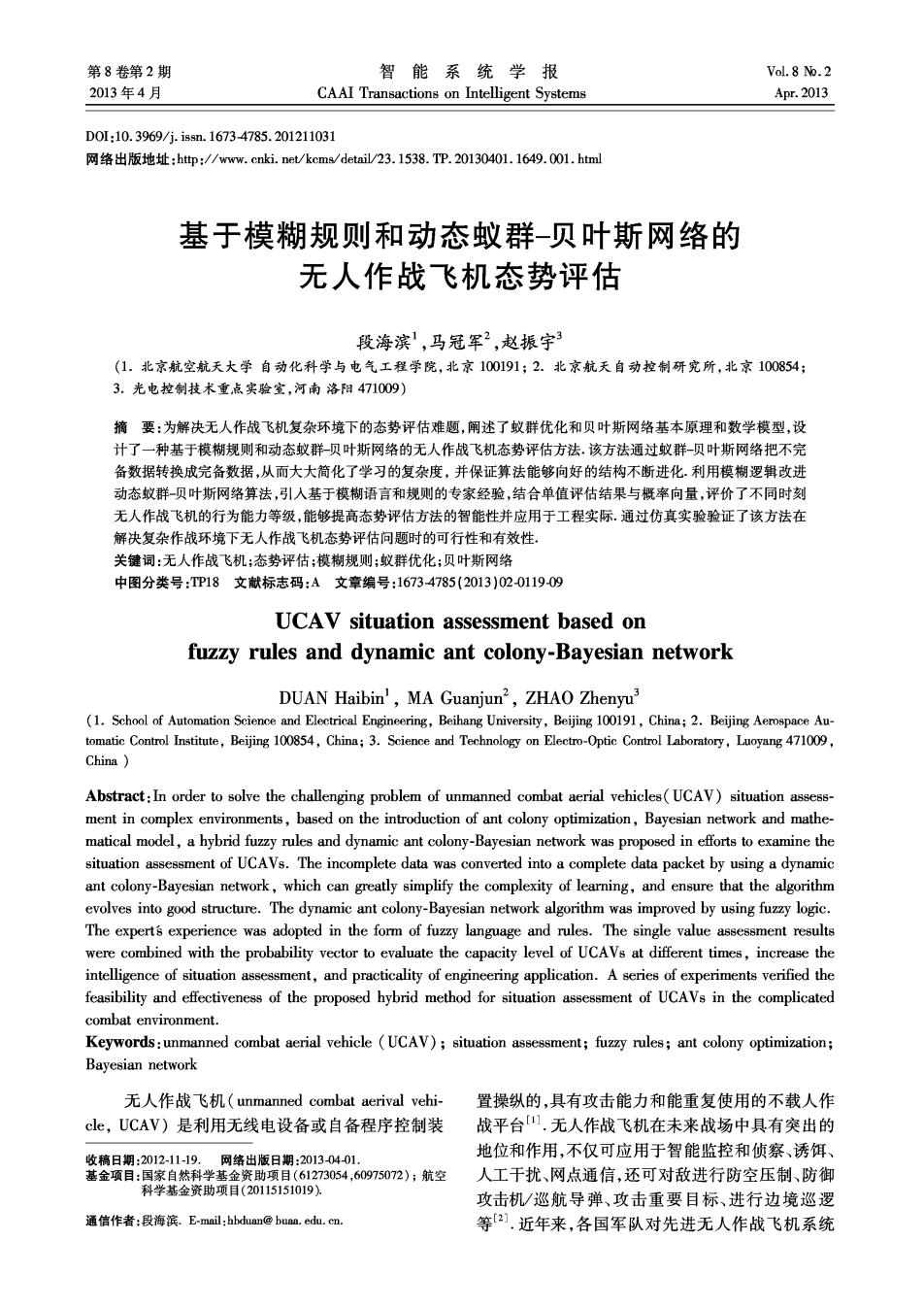
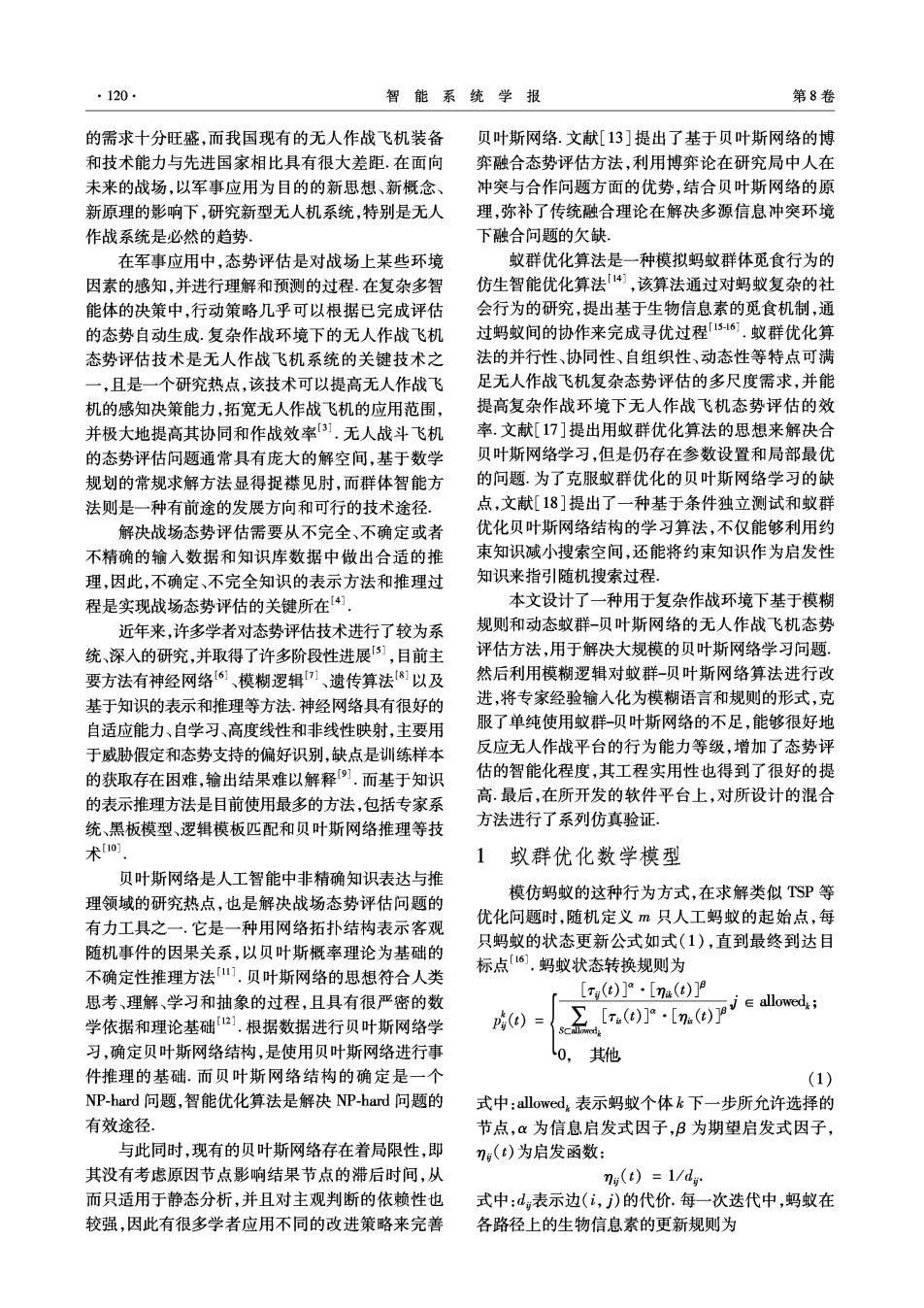
·122 智能系统学报 第8卷 以及使蚂蚁移动到下一步的概率准则卫. 用了基于蚁群优化的随机搜索机制,因此可以寻找 设该蚁群有m只蚂蚁,在t时刻,信息素强度 到全局最优解,并且该解的质量也比许多确定搜索 T与有向边x一x有关,而每条边的初始信息素强 算法求得的解要好得多.然而,该算法也存在2个不 度均为常数C,即r(0)=C.如图1所示,使用增量 足之处,即其迭代次数太大以及收敛时间过长.而主 式的方法构筑网络,定义G为初始状态,G表示当 要原因为,如果该算法不经过候选解空间的话,蚂蚁 前状态有条边71,在算法中蚂蚁不断从当前某状 有可能找到不在最优解里面的有向线段.即蚁群-贝 态G,增加一条有向边:←一从而到达新的状态 叶斯网络有可能找到一些没用的解的组合,从而使 G+1,即G+1=GU{x:←}在终止状态时,已找不 得搜索空间变大并且浪费了运行时间. 到新的边使G所对应的贝叶斯网络打分值更高[]. 2.5基于模糊策略的动态蚊群-贝叶斯网络 得到贝叶斯网络结构以后,可以用贝叶斯网络 结构进行推理.考虑到贝叶斯网络应用于态势评估 的优点,文献[25]研究了基于贝叶斯网络推理模型 的推理算法,并构建了战场威胁源态势评估算法,实 时给出了定量的评估结果.Reichard26运用态势评 估研究了一种平台健康状况的感知方法,并利用基 图1蚂蚊构造贝叶斯网络过程 于行为的智能控制器设计了自主决策器。 Fig.1 The process of ant's constructing Bayesian net- 2.5.1信息传播算法 work 如图2所示,基本的贝叶斯网络结构包含节点 按照K2打分制,蚁群的启发信息可表述为 X,父节点U和m个子节点Y,Y2,…,Ym 7=f,(x,P(x)U{x})-f(,P()). 常见的信息素更新规则可分为全局和局部2种 方式 1)全局更新规则.当网络结构为当前最好解 时,进行全局更新,增加解中边所对应的信息素.全 局更新规则公式为 Tg(t+1)=(1-p1)r(t)+p1△r(t). 图2贝叶斯网络结构 式中:P1表示全局信息素挥发系数;△r=1/,f是 Fig.2 The structure of Bayesian network 当前解对应的打分函数的绝对值。 用Bl表示节点X的置信度值,入表示子节点 2)局部更新规则.局部更新则是对蚁群算法得 的诊断概率,π表示因果概率. 到的每个解进行更新.局部更新规则公式为 在贝叶斯网络中,每一个节点在接受到新信息 T(t+1)=(1-p2)rg(t)+P2ro: 时更新自身信度,进而将自身信度更新的影响向其 式中:P2表示局部信息素挥发系数,且一般情况下 他节点传播,具体步骤如下: p2≠p1;T,为一个与初始解相关的常数, 1)根据新获取的信息更新本节点的置信度, 网络边的选择规则:选择某条边x,x,时,必须 Bel(x)=a(x)π(x),A(x)=Π入y(x), 满足: r,l ∫maxijeFcTy(ng)*f,9≤go; T(x)=Tx(u)x Mnu. 2)自底向上更新. LL,J,其他. 入x(u)=λ(x)×Ma 式中:F。是所有候选边的集合,入用来调节启发信 3)自顶向下更新. 息;q是处于[0,1]内的随机数,9o用来调节信息素 对边选择影响的重要性. Ty)=am()1y,(). 为了提高解的精度,本算法中采用试探法,在结 式中:πx(u)表示因果预测概率,入y,(x)表示Y到X 果中随机增加、删除、反转某条边,如果某次操作出 的事件诊断概率;且∑Bl(x)=1.例如,按照所提出 现了环,则相应地删除或反转环中的另一条边.在操 的蚁群-贝叶斯网络建模步骤,无人作战飞机评估节 作完成后,计算新解的打分值,如果好于原解打分 点可以用3个状态来描述:自毁、放弃和攻击.因此, 值,则保留新解,否则保留原来的解.由于该算法采 利用以上的推理规则可得到形如Bl=(0.6,0.3
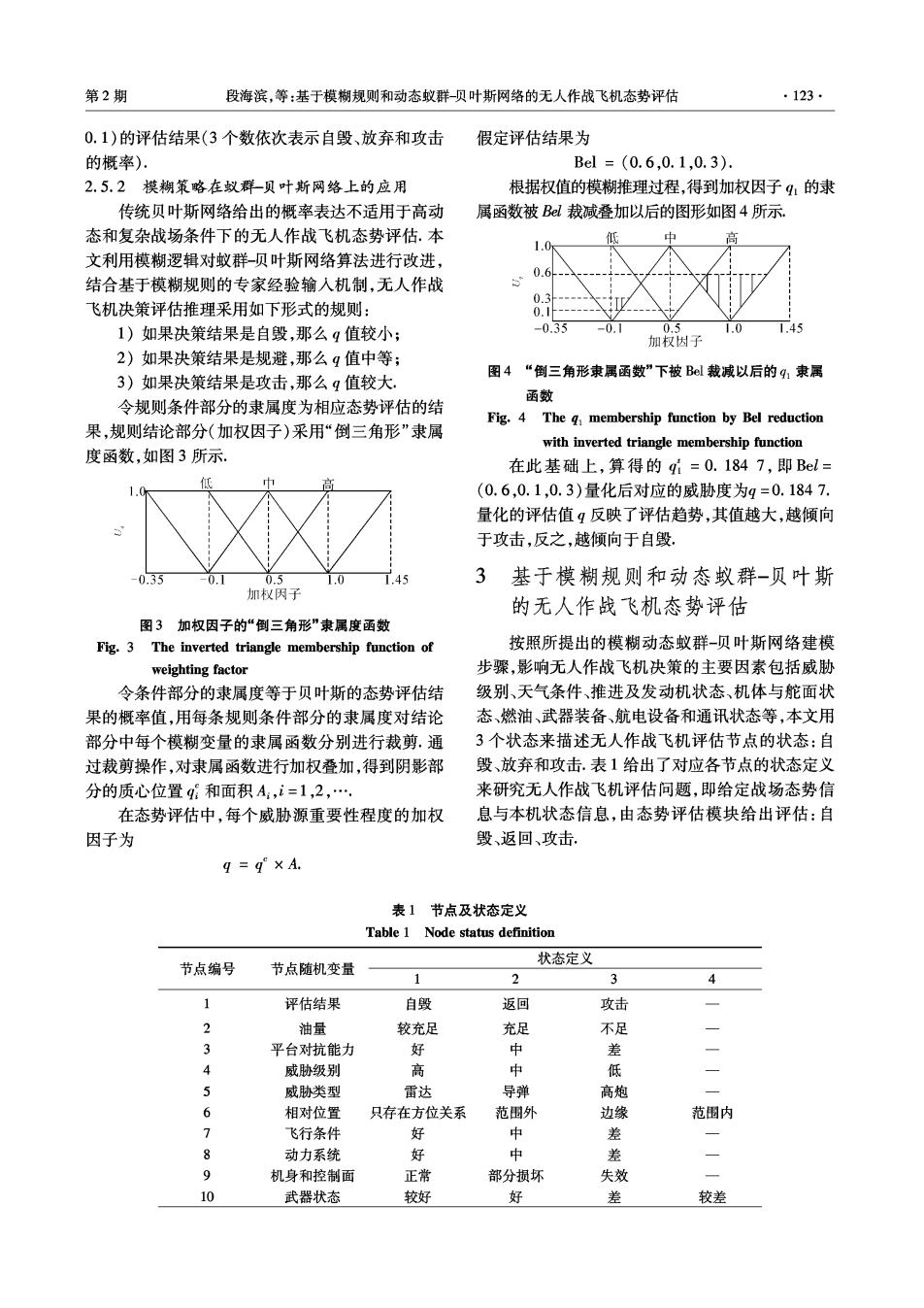
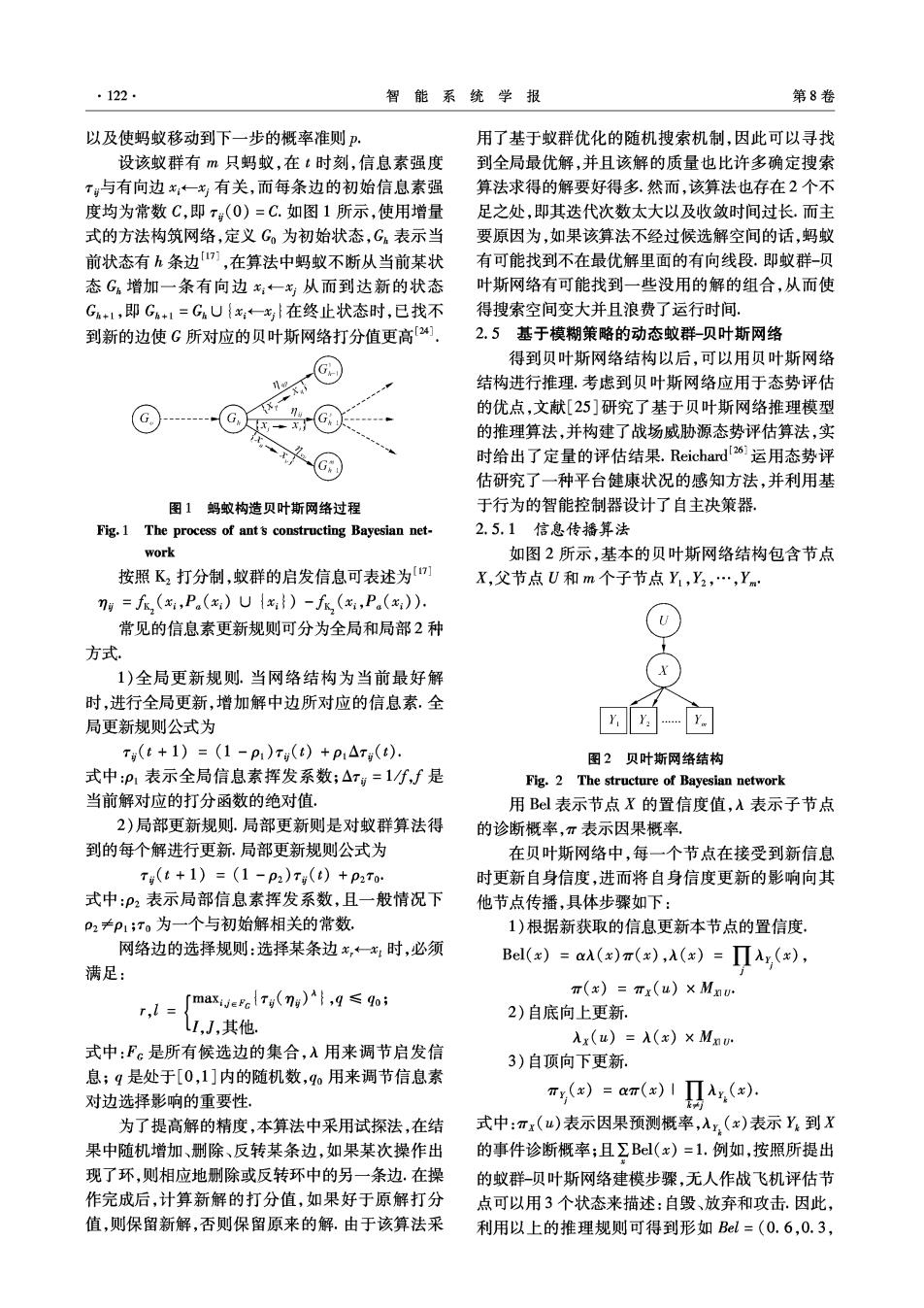
第2期 段海滨,等:基于模糊规则和动态蚁群-贝叶斯网络的无人作战飞机态势评估 ·123· 0.1)的评估结果(3个数依次表示自毁、放弃和攻击 假定评估结果为 的概率). Bel=(0.6,0.1,0.3) 2.5.2模糊策略在蚁群贝叶斯网络上的应用 根据权值的模糊推理过程,得到加权因子q,的隶 传统贝叶斯网络给出的概率表达不适用于高动 属函数被Bl裁减叠加以后的图形如图4所示. 态和复杂战场条件下的无人作战飞机态势评估.本 低 中 高 1.0 文利用模糊逻辑对蚁群-贝叶斯网络算法进行改进, 0.6 结合基于模糊规则的专家经验输入机制,无人作战 飞机决策评估推理采用如下形式的规则: 1)如果决策结果是自毁,那么9值较小; -0.35 0.5 1.0 1.45 加权因子 2)如果决策结果是规避,那么q值中等; 图4“倒三角形隶属函数”下被Bel裁减以后的9:隶属 3)如果决策结果是攻击,那么q值较大, 函数 令规则条件部分的隶属度为相应态势评估的结 Fig.4 The q membership function by Bel reduction 果,规则结论部分(加权因子)采用“倒三角形”隶属 with inverted triangle membership function 度函数,如图3所示 在此基础上,算得的gi=0.1847,即Bel= 低 (0.6,0.1,0.3)量化后对应的威胁度为q=0.1847. 量化的评估值q反映了评估趋势,其值越大,越倾向 于攻击,反之,越倾向于自毁。 035 0 0.5 3基于模糊规则和动态蚁群-贝叶斯 加权因子 的无人作战飞机态势评估 图3加权因子的“倒三角形”隶属度函数 Fig.3 The inverted triangle membership function of 按照所提出的模糊动态蚁群-贝叶斯网络建模 weighting factor 步骤,影响无人作战飞机决策的主要因素包括威胁 令条件部分的隶属度等于贝叶斯的态势评估结 级别、天气条件、推进及发动机状态、机体与舵面状 果的概率值,用每条规则条件部分的隶属度对结论 态、燃油、武器装备、航电设备和通讯状态等,本文用 部分中每个模糊变量的隶属函数分别进行裁剪,通 3个状态来描述无人作战飞机评估节点的状态:自 过裁剪操作,对隶属函数进行加权叠加,得到阴影部 毁、放弃和攻击.表1给出了对应各节点的状态定义 分的质心位置g和面积A:,i=1,2,…, 来研究无人作战飞机评估问题,即给定战场态势信 在态势评估中,每个威胁源重要性程度的加权 息与本机状态信息,由态势评估模块给出评估:自 因子为 毁、返回、攻击. 9=q×A. 表1节点及状态定义 Table 1 Node status definition 状态定义 节点编号 节点随机变量 1 2 3 4 评估结果 自毁 返回 攻击 2 油量 较充足 充足 不足 平台对抗能力 好 差 威胁级别 高 中 低 5 威胁类型 雷达 导弹 高炮 6 相对位置 只存在方位关系 范围外 边缘 范围内 飞行条件 中 差 8 动力系统 好 中 差 9 机身和控制面 正常 部分损坏 失效 10 武器状态 较好 好 差 较差