
第8卷第2期 智能系统学报 Vol.8 No.2 2013年4月 CAAI Transactions on Intelligent Systems Apr.2013 D0I:10.3969/i.issn.16734785.201202001 网络出版t地址:htp://www.cnki.net/kcma/detail/23.1538.TP.20121116.1701.006.html 基于粒子滤波的未知环境下机器人同时定位、 地图构建与目标跟踪 伍明,孙继银 (中国人民解放军第二地兵工程大学指挥信息系统工程系,陕西西安710025) 摘要:为了解决机器人在未知环境下的目标跟踪问题,提出了一种基于粒子滤波的机器人同时定位、地图构建与 目标跟踪方法.该方法采用Rao-Blackwellized粒子滤波器对机器人位姿状态、标志柱分布和目标位置同时进行估计. 该方法中,粒子群的总体分布情况表征机器人位姿状态,而每个粒子均包含2类EKF滤波器,其中一类用来完成对 标志柱分布的估计,另一类用来完成对目标状态的估计,粒子的权值则由粒子状态相对于标志柱和目标状态2类相 似度共同产生.通过仿真和实体机器人实验验证了该方法的有效性。 关键词:Rao-Blackwellized粒子滤波;同时定位与地图构建;目标跟踪 中图分类号:TP242.6文献标志码:A文章编号:16734785(2013)02016809 Simultaneous localization,mapping and object tracking in an unknown environment using particle filtering WU Ming,SUN Jiyin (The department of commander information system,The PLA Second Artillery Engineering College,Xi'an 710025,China) Abstract:The proposed research paper examines a simultaneous localization,mapping,and object tracking meth- od.The examination was in part based on a particle filter that allows a robot to track an object in an unknown envi- ronment.This method utilizies the Rao-Blackwellized particle filting to estimate the pose of robot,landmarks distri- bution,and object position simultaneously.The general distribution of a particle swarm represents the pose of a ro- bot,and each particle includes two kinds of Extended Kalman Filter(EKF).One EKF estimates distribution of landmarks,while the other EKF estimates the state of the object.The weight of particle is determined by the combi- nation of two likelihoods,one is the likelihood between particle state and landmarks,and the other is the likelihood between particle state and object state.The results of the research indicate the valid robot experimentation and sim- ulation,confirm the proposed research approach is very effective. Keywords:Rao-Blackwellized particle filter;simultaneous localization and mapping;object tracking 机器人同时定位与地图构建(simultaneous lo-法3];2)基于Bayesain估计的方法,而基于 calization and mapping,SLAM)是指机器人在未知环 Bayesain估计的方法又主要分成基于扩展式卡尔曼 境下,根据传感器信息的迭代完成环境地图构造,并 滤波的方法46和基于粒子滤波的方法79] 同时对机器人位姿状态进行估计的过程,SLAM的 对于某些实际任务单凭传统的SLAM方法是无 难度在于准确的地图构建依靠于准确的机器人位姿 法解决的,例如未知环境下目标的跟踪任务、未知环 估计,而准确的机器人位姿估计反过来又依靠于准 境下机器人的围捕任务.这些任务要求机器人在未知 确的环境地图.对于这个“鸡生蛋,蛋生鸡”的问题 环境条件下完成对目标的追踪,与传统目标跟踪问题 主要存在2类解决方法:1)基于扫描点匹配的方 不同,传统的目标跟踪问题往往假设系统准确知道传 感器的状态,并在此基础上,通过Bayesain方法对目 收稿日期:2012-0202.网络出版日期:2012-11-16 基金项目:国家“863”计划资助项目(2006AA04Z258): 标状态进行预测和更新.而本文所研究问题的特点 通信作者:伍明.E-mail:hyacinth531@163.com. 有:1)传感器的移动性和运行环境的未知性.在目标
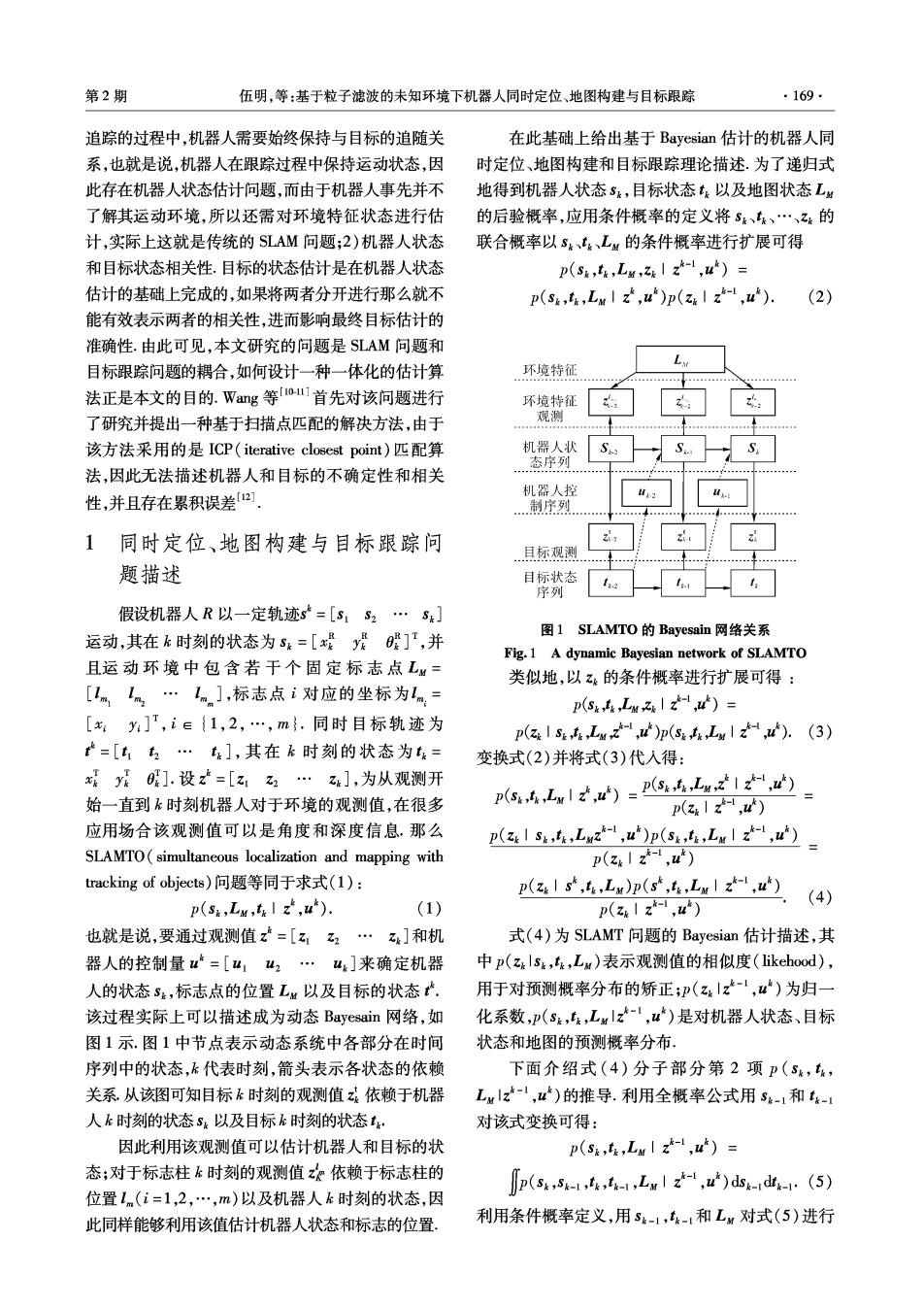
第2期 伍明,等:基于粒子滤波的未知环境下机器人同时定位、地图构建与目标跟踪 ·169 追踪的过程中,机器人需要始终保持与目标的追随关 在此基础上给出基于Bayesian估计的机器人同 系,也就是说,机器人在跟踪过程中保持运动状态,因 时定位、地图构建和目标跟踪理论描述.为了递归式 此存在机器人状态估计问题,而由于机器人事先并不 地得到机器人状态S,目标状态t,以及地图状态L 了解其运动环境,所以还需对环境特征状态进行估 的后验概率,应用条件概率的定义将5k、…、的 计,实际上这就是传统的SLAM问题;2)机器人状态 联合概率以S、、LM的条件概率进行扩展可得 和目标状态相关性.目标的状态估计是在机器人状态 p(s,Ln,zu)= 估计的基础上完成的,如果将两者分开进行那么就不 p(,p(u). (2) 能有效表示两者的相关性,进而影响最终目标估计的 准确性.由此可见,本文研究的问题是SLAM问题和 目标跟踪问题的耦合,如何设计一种一体化的估计算 环境特征 法正是本文的目的.Wang等o川首先对该问题进行 环境特征 了研究并提出一种基于扫描点匹配的解决方法,由于 观测 该方法采用的是ICP(iterative closest point)匹配算 机器人状 法,因此无法描述机器人和目标的不确定性和相关 态序列 机器人控 性,并且存在累积误差2] 制序列 1同时定位、地图构建与目标跟踪问 且标观测 题描述 目标状态 序列 假设机器人R以一定轨迹s=[s1S2…5] 图1 SLAMTO的Bayesain网络关系 运动,其在k时刻的状态为5k=[y是],并 Fig.1 A dynamic Bayesian network of SLAMTO 且运动环境中包含若干个固定标志点Lw= 类似地,以z。的条件概率进行扩展可得: [m1n,…1nn],标志点i对应的坐标为1= p(S)= [xy:],i∈{1,2,…,m.同时目标轨迹为 p(a4ls,4,Lw2,tp(s4,y|t,).(3) t=[tt2…],其在k时刻的状态为= 变换式(2)并将式(3)代入得: xy].设z=[z12…],为从观测开 始一直到k时刻机器人对于环境的观测值,在很多 p(s,4Lwlt,)=p4Lw之1,) p(zu) 应用场合该观侧值可以是角度和深度信息.那么 p(a4ls,4,Lw2,t)p(s,4,Lwl2-,) SLAMTO(simultaneous localization and mapping with p(zu) tracking of objects)问题等同于求式(1): p(zst,Lv)p(s,Luu) p(S:,L,tI z,u). (1) p(zu) (4) 也就是说,要通过观测值z=[zz2…2.]和机 式(4)为SLAMT问题的Bayesian估计描述,其 器人的控制量4=[4142…k]来确定机器 中p(z.lsk,t,L)表示观测值的相似度(likehood), 人的状态S,标志点的位置LM以及目标的状态t. 用于对预测概率分布的矫正;p(zz-1,4)为归一 该过程实际上可以描述成为动态Bayesain网络,如 化系数,p(s,t,Luz-1,)是对机器人状态、目标 图1示.图1中节点表示动态系统中各部分在时间 状态和地图的预测概率分布, 序列中的状态,k代表时刻,箭头表示各状态的依赖 下面介绍式(4)分子部分第2项p(5k,t, 关系.从该图可知目标k时刻的观测值:依赖于机器 Lwz-1,)的推导.利用全概率公式用sk-1和tk- 人k时刻的状态S以及目标k时刻的状态k: 对该式变换可得: 因此利用该观测值可以估计机器人和目标的状 p(St,t,Lul,u)= 态;对于标志柱斥时刻的观测值依赖于标志柱的 p(ss14e,4a1,Lwlt-l,d)ds1d业1…(5) 位置1n(i=1,2,…,m)以及机器人k时刻的状态,因 此同样能够利用该值估计机器人状态和标志的位置。 利用条件概率定义,用sk-1,-1和Lw对式(5)进行
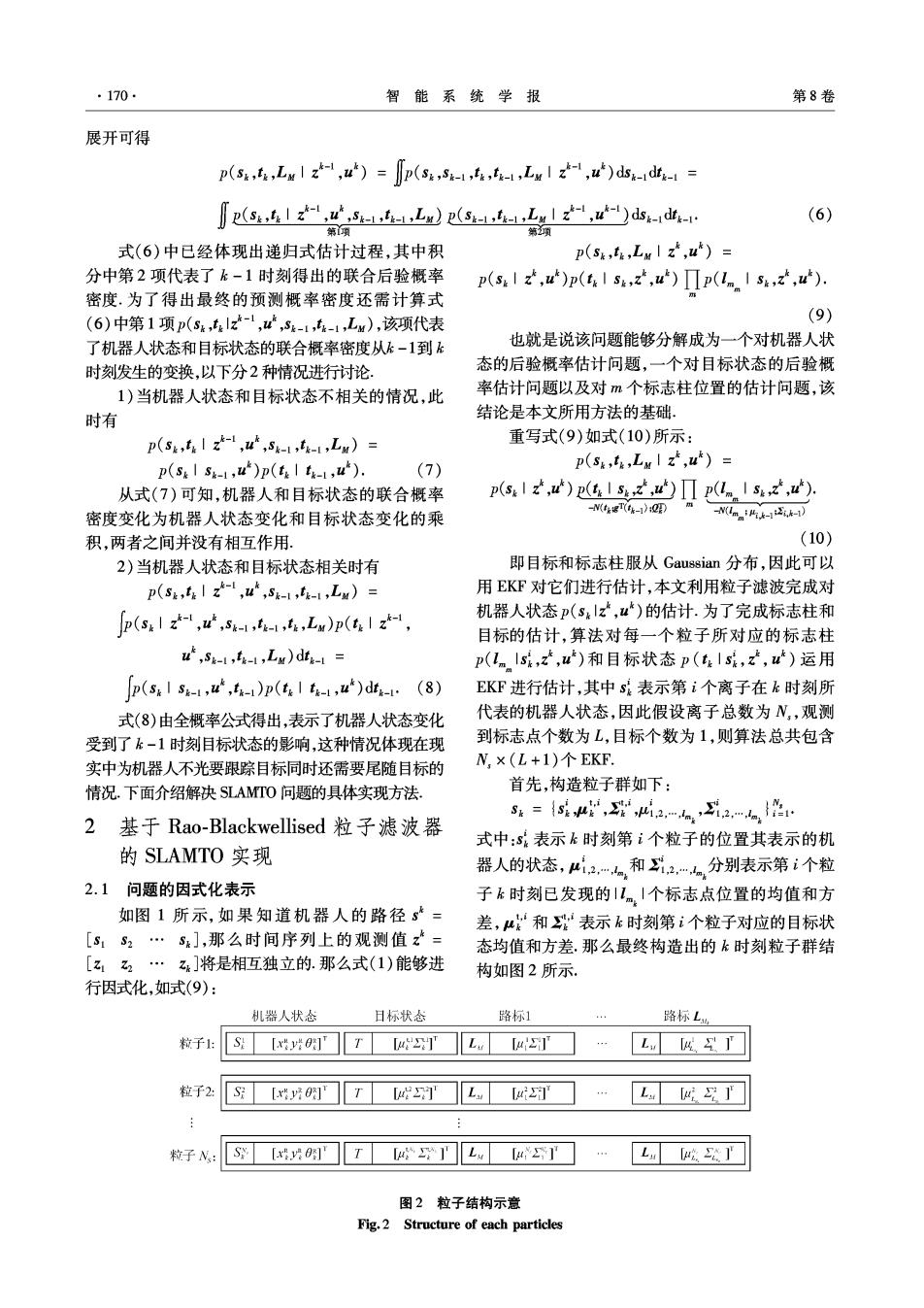
·170. 智能系统学报 第8卷 展开可得 p()=p()dsd= 2(2()dsd (6) 第项 第项 式(6)中已经体现出递归式估计过程,其中积 p(st,t,Lul z",u")= 分中第2项代表了k-1时刻得出的联合后验概率 p(sp(Ip(I). 密度.为了得出最终的预测概率密度还需计算式 (6)中第1项p(s,z-1,W,k-1,在-1,Lw),该项代表 (9) 了机器人状态和目标状态的联合概率密度从k-1到k 也就是说该问题能够分解成为一一个对机器人状 时刻发生的变换,以下分2种情况进行讨论。 态的后验概率估计问题,一个对目标状态的后验概 1)当机器人状态和目标状态不相关的情况,此 率估计问题以及对m个标志柱位置的估计问题,该 时有 结论是本文所用方法的基础, p(s,4lz-,d,-1,,Lw)= 重写式(9)如式(10)所示: p(SI S-,u)p(tt,u). (7) p(s,t,Lyzu)= 从式(7)可知,机器人和目标状态的联合概率 p(slt,)4ls大,)Πp(Is大,) -N(wT(-》:Q级 密度变化为机器人状态变化和目标状态变化的乘 -N(Im:i-i.k-1) 积,两者之间并没有相互作用. (10) 2)当机器人状态和目标状态相关时有 即目标和标志柱服从Gaussian分布,因此可以 p(st,tyl z,u,st-,tt-,Ln)= 用EKF对它们进行估计,本文利用粒子滤波完成对 p(s4lt-,t,-1,4-,4e,Lw)p(elz-1, 机器人状态p(sz,)的估计.为了完成标志柱和 目标的估计,算法对每一个粒子所对应的标志柱 u,Sg-l,t-l,Lw)d止-l= p(1ms,z,)和目标状态p(tlst,z,)运用 p(sls-1,W,l)p(al1,t)d此…(8) EKF进行估计,其中s表示第i个离子在k时刻所 式(8)由全概率公式得出,表示了机器人状态变化 代表的机器人状态,因此假设离子总数为N,观测 受到了k-1时刻目标状态的影响,这种情况体现在现 到标志点个数为L,目标个数为1,则算法总共包含 实中为机器人不光要跟踪目标同时还需要尾随目标的 N,×(L+1)个EKF. 情况.下面介绍解决SLAMTO问题的具体实现方法, 首先,构造粒子群如下: 2基于Rao-Blackwellised粒子滤波器 =,i222-指 式中:S表示k时刻第i个粒子的位置其表示的机 的SLAMTO实现 器人的状态,u2和,2分别表示第i个粒 2.1问题的因式化表示 子k时刻已发现的1|个标志点位置的均值和方 如图1所示,如果知道机器人的路径s“= 差,和表示k时刻第i个粒子对应的目标状 [s:2…S],那么时间序列上的观测值z”= 态均值和方差.那么最终构造出的k时刻粒子群结 [z2… ,]将是相互独立的.那么式(1)能够进 构如图2所示 行因式化,如式(9): 机器人状念 日标状态 路标1 路标L 粒子1: [xty:0:]T [4T LwE公 粒子2: [x贤]T Lu Lu L4421 粒子N: S [:]T LL [u L吃' 图2粒子结构示意 Fig.2 Structure of each particles

第2期 伍明,等:基于粒子滤波的未知环境下机器人同时定位、地图构建与目标跟踪 ·171· 2.2粒子权值的计算 阵,为式(12)对t的雅克比阵在s和t处的值,即 下面介绍粒子权值的计算,粒子权值相当于该 粒子对应观测值的相似度,即 w=p(zk|S2,k,乙g-1,4)= (-2+-y.-3-y 0 -x0 p(24乙n|52,4%,2k-1,4s)= 类似,可以计算出p(Is) p(1S,zk-1,)p(z|S,4,3k-1,) 2.3目标和标志柱均值和方差的计算 Mankoy p(zn,1S,乙-1,us)= 接下来介绍目标点状态的估计,基于单个粒子 p(zI s)p(zI si,t)p(zm I s) 目标点状态估计可表示为 p(I s)p(z). (11) p(41s,)g 式中:,之之,分别代表对已知标志柱、目标和新标 ap()p() 志柱的观测值,‘为预测阶段根据EKF得到的目标 p(as14,)p(1s,,w) 状态(参见下2.3节内容),而p(zm,Is)认为是均匀 p(a1,4)p(,l5克,,wm 分布的,因此最终权值可表示为标志柱观测值相似 度和目标观测值相似度之间的乘积.以下具体介绍 p(zs1si,4)p(e1t-1,s,z-l, 目标观测值相似度p(z,Is,)的计算, dp(4l,2,)1 假设机器人的观测值为距离和角度信息,则机 2(zs)p(1,4)p(l1之,)d出- 器人对目标的观测模型: 更新阶设 预碳阶没 √(x-x)2+(y-y)7 (15) z4=h(s,)= argtan( 式中:α为归一化系数,s为k时刻第i个粒子状态 -0 √(x-x)2 式(15)可以应用EKF进行估计,EKF分为预测和更 (12) 新2个阶段,分别介绍如下 式中:s=[xRyR0]T表示机器人的状态量,t= 2.3.1EKF预测阶段 [xy8]T表示目标的状态量,d和0分别为机器 本文假设目标以恒速u=[vw]T运动并且u 人的观测值. 上存在协方差为Q”的误差(这里假设目标的运动 假设观测值相似度服从正态分布p(z)~N(, 为单模态形式,多模态运动形式将是今后研究的目 ),则相似度函数p(z,Is,)(为了简洁表示省去上 标).并且目标运行遵循差动驱动模型,即非完整性 标和下标)如式(13): 约束模型: p(zI s,t)= ti=g(ti,uk)= 2mp(-2g-i))g-p》 -1 k·△t·co8(0k-1+△t·wx)7 yi-1 g·△t·sin(0k-l+△t·ws) (16) (13) 0k1 △t·①k 式中:为根据该粒子表示的机器人状态s和预测目 式中:△t为输人的间隔时间.从式(16)可见,目标在 标状态t由式(12)得到的预测观测值,乙:为实际的观测 k时刻的不确定性由2部分组成,1)是由k-1时刻 值,号为观测值的协方差矩阵,下面介绍的计算. 的不确定性传播而来,记作-1;2)是由输人量的 协方差阵反映对目标观测值的误差情况,这 不确定性Q传播而来,记作.则根据误差传播公式 种误差由三方面造成,首先是传感器本身的误差,设 可以得到k时刻的预测误差协方差阵为 其值为R“;其次是由目标状态不确定性引起的误 残=+”= 差,设其值为R;最后为机器人状态不确定性引起 H-1(H)T+HQ(). (17) 的误差,由于这里用粒子群来代表这种不确定性,因 式中:H"为式(16)对于输人4的雅克比阵在4s和 此对于单个粒子来说,认为机器人状态不存在误差。 -1处的值,H为式(16)对于机器人状态t的雅克 最终表示如式(14): 比阵在k和1-1处的值,即 =R+Rm=H()T+Rm.(14)》 H=08 式中:为预测阶段由EKF得到的目标状态协方差 d让,4-1三
·172· 智能系统学报 第8卷 「·cos(04+·)-·△2·sin(04+△·)门 13)F5.≠0 d·sin(0+·)4··cos(0:+·4) 14)ww =p(nIs)p()() 0 15)iJ=EKFCi =g. 16)ENDIF 17)0=0·0w T10-vk·△t·sin(0-1+△t·we)1 18)Fzm,≠☑ 01tk·△t·cos(0-4+△·) L00 1 I9)[i2-,'元2,.」=ADD_LANKMARK 2.3.2EKF更新阶段 ([iaa2i24]) 在每一次迭代过程中若机器人没有发现目标, 20)ENDIF 即目标的观测值为空时,那么EKF只进行预测,其 21ELSE 结果是目标的不确定性将不断增大.当机器人发现 22)[ui2-n2i2-a,]=[n2h12i2hn1 目标时,EKF将利用观测值对目标的均值和方差进 23)ENDELSE 行修正,而减少目标的不确定性, 24)ENDFOR 假设由预测阶段已经得到目标均值和方差为 25)ENDIF 和,而实际观测值为乙,则EKF对均值和方差 26)IF Resample_condition_satisfy 的更新为 27)[{,,2-,2a]=RESA- i=ui+Kkaiman (z Hui), MPLE[ 花=(I-Kkaim H') (18) 28)ENDIF 式中:Kkdman为卡尔曼系数其值,Kamn= 其中1)~5)是预测阶段(prediction step),首先 ()T(H()T+Rm)1,Rm为传感器误差 根据机器人状态转移方程对粒子进行预测撒点(粒子 协方差阵。 滤波形式),之后对该粒子中对应的目标状态均值和 单个粒子标志柱位置估计也同样能够用相似的 方差利用目标的状态转移方程进行预测(EKF预测 方式进行描述,不再赘述, 阶段式(16)和(17),此时的预测结果是存在误差的, 2.4 SLAMTO算法 算法主要思想是对整个粒子群应用粒子滤波进 当有观测值出现,算法进入修正阶段,即6)~24),主 行重要性采样及重采样,而在每个粒子中又应用 要包括:根据式(11)进行的粒子权值的更新,目标状 EKF对标志柱及目标的均值和方差进行预测和校 态和标志柱位置的更新.具体来讲,第8)行运用数据 正操作,具体算法如下。 关联方法将观测值2区分为江,2,(分别表示对 [{i,ui2-a,}]= 标志柱、目标、新标志柱的观测值),而Table则包含 PFSLAMT[-12山2a马a--格] ,和已知标志柱的对应关系,需要注意的是每个粒子 i均拥有自己的k时刻环境地图1,2,…,1m,并根据 1)F0Ri=1:N, 2)s是~p(sxls话-1,x), 该地图进行数据关联.9)~12)行利用z4,和式(11)对 3)=g(,4), 粒子权值进行更新,并根据式(18)用EKF对目标的 4)=-1(H)「+酽Q(H), 均值和方差进行修正,类似地13)~16)行利用对 5)ENDFOR 粒子权值进行更新,并用EKF对已知标志柱均值和 6)IFz%≠☑ 方差进行修正,需要注意的是当观测到多个已知标志 7)FOR i=1:N, 柱时粒子权值等于其对应的每一个相似度(likehood) 8)[Table =Data-association 的乘积.17)行根据式(11)生成最终的粒子权值.18) [n.2-h2i2.mh]) ~23)行完成对于标志柱地图的更新.26)~27)行利 用文献[13]介绍的方法对粒子群进行重采样。 9)Fz,≠0 10)wi=p() 3实验结果 11)[u]=EKFUPDATE() 下面首先通过仿真实验从定位准确性、粒子数 12)ENDIF 量和标志柱数量对定位的影响三方面来验证算法的