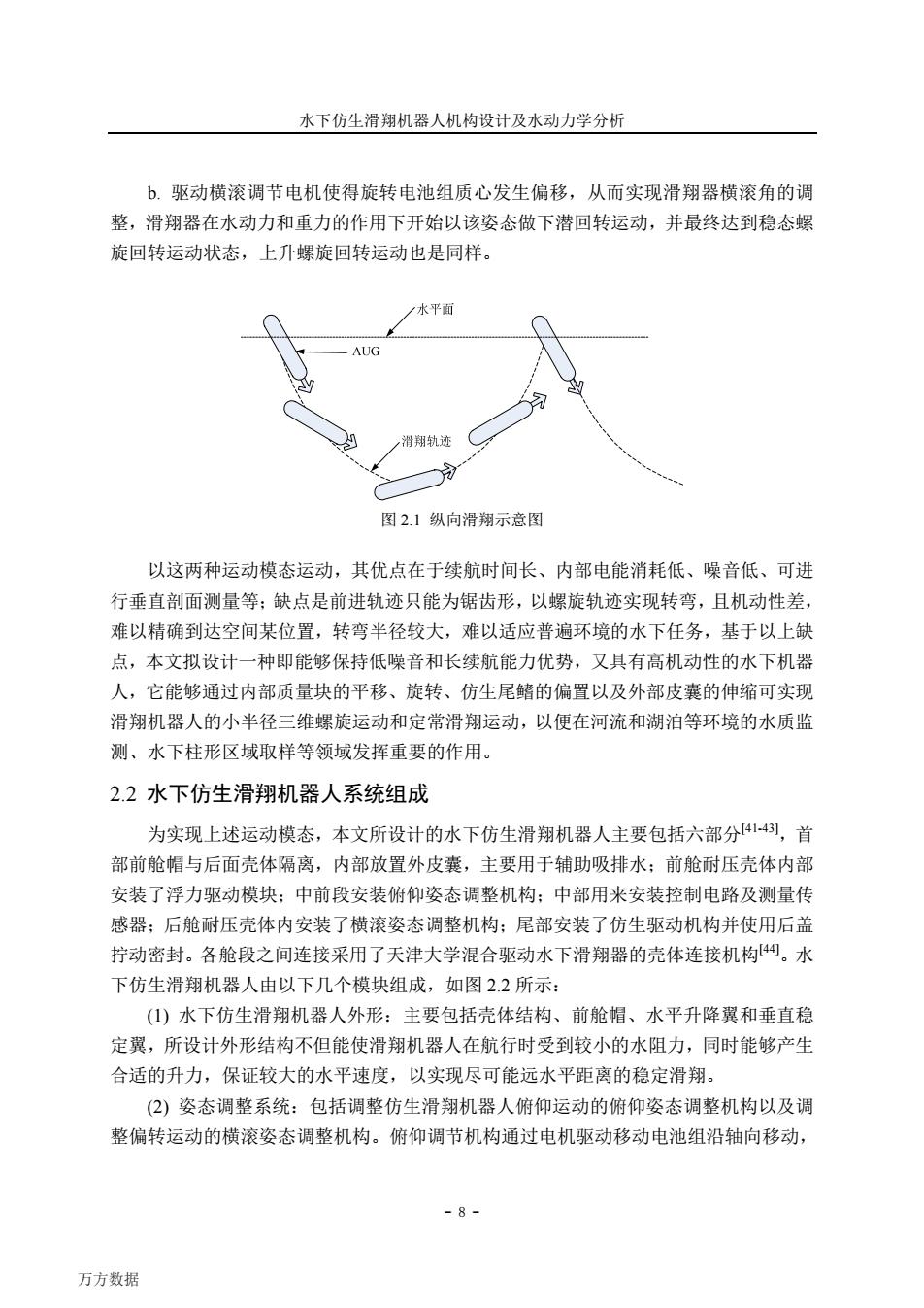
水下仿生滑翔机器人机构设计及水动力学分析 b.驱动横滚调节电机使得旋转电池组质心发生偏移,从而实现滑翔器横滚角的调 整,滑翔器在水动力和重力的作用下开始以该姿态做下潜回转运动,并最终达到稳态螺 旋回转运动状态,上升螺旋回转运动也是同样。 水平面 AUG ,滑翔轨迹 图2.1纵向滑翔示意图 以这两种运动模态运动,其优点在于续航时间长、内部电能消耗低、噪音低、可进 行垂直剖面测量等:缺点是前进轨迹只能为锯齿形,以螺旋轨迹实现转弯,且机动性差, 难以精确到达空间某位置,转弯半径较大,难以适应普遍环境的水下任务,基于以上缺 点,本文拟设计一种即能够保持低噪音和长续航能力优势,又具有高机动性的水下机器 人,它能够通过内部质量块的平移、旋转、仿生尾鳍的偏置以及外部皮囊的伸缩可实现 滑翔机器人的小半径三维螺旋运动和定常滑翔运动,以便在河流和湖泊等环境的水质监 测、水下柱形区域取样等领域发挥重要的作用。 2.2水下仿生滑翔机器人系统组成 为实现上述运动模态,本文所设计的水下仿生滑翔机器人主要包括六部分414),首 部前舱帽与后面壳体隔离,内部放置外皮囊,主要用于辅助吸排水:前舱耐压壳体内部 安装了浮力驱动模块:中前段安装俯仰姿态调整机构:中部用来安装控制电路及测量传 感器:后舱耐压壳体内安装了横滚姿态调整机构:尾部安装了仿生驱动机构并使用后盖 拧动密封。各舱段之间连接采用了天津大学混合驱动水下滑翔器的壳体连接机构4。水 下仿生滑翔机器人由以下几个模块组成,如图2.2所示: (1)水下仿生滑翔机器人外形:主要包括壳体结构、前舱帽、水平升降翼和垂直稳 定翼,所设计外形结构不但能使滑翔机器人在航行时受到较小的水阻力,同时能够产生 合适的升力,保证较大的水平速度,以实现尽可能远水平距离的稳定滑翔。 (2)姿态调整系统:包括调整仿生滑翔机器人俯仰运动的俯仰姿态调整机构以及调 整偏转运动的横滚姿态调整机构。俯仰调节机构通过电机驱动移动电池组沿轴向移动, 万方数据
水下仿生滑翔机器人机构设计及水动力学分析 - 8 - b. 驱动横滚调节电机使得旋转电池组质心发生偏移,从而实现滑翔器横滚角的调 整,滑翔器在水动力和重力的作用下开始以该姿态做下潜回转运动,并最终达到稳态螺 旋回转运动状态,上升螺旋回转运动也是同样。 图 2.1 纵向滑翔示意图 以这两种运动模态运动,其优点在于续航时间长、内部电能消耗低、噪音低、可进 行垂直剖面测量等;缺点是前进轨迹只能为锯齿形,以螺旋轨迹实现转弯,且机动性差, 难以精确到达空间某位置,转弯半径较大,难以适应普遍环境的水下任务,基于以上缺 点,本文拟设计一种即能够保持低噪音和长续航能力优势,又具有高机动性的水下机器 人,它能够通过内部质量块的平移、旋转、仿生尾鳍的偏置以及外部皮囊的伸缩可实现 滑翔机器人的小半径三维螺旋运动和定常滑翔运动,以便在河流和湖泊等环境的水质监 测、水下柱形区域取样等领域发挥重要的作用。 2.2 水下仿生滑翔机器人系统组成 为实现上述运动模态,本文所设计的水下仿生滑翔机器人主要包括六部分[41-43],首 部前舱帽与后面壳体隔离,内部放置外皮囊,主要用于辅助吸排水;前舱耐压壳体内部 安装了浮力驱动模块;中前段安装俯仰姿态调整机构;中部用来安装控制电路及测量传 感器;后舱耐压壳体内安装了横滚姿态调整机构;尾部安装了仿生驱动机构并使用后盖 拧动密封。各舱段之间连接采用了天津大学混合驱动水下滑翔器的壳体连接机构[44]。水 下仿生滑翔机器人由以下几个模块组成,如图 2.2 所示: (1) 水下仿生滑翔机器人外形:主要包括壳体结构、前舱帽、水平升降翼和垂直稳 定翼,所设计外形结构不但能使滑翔机器人在航行时受到较小的水阻力,同时能够产生 合适的升力,保证较大的水平速度,以实现尽可能远水平距离的稳定滑翔。 (2) 姿态调整系统:包括调整仿生滑翔机器人俯仰运动的俯仰姿态调整机构以及调 整偏转运动的横滚姿态调整机构。俯仰调节机构通过电机驱动移动电池组沿轴向移动, 万方数据

兰州交通大学硕士学位论文 从而调整整体重心的轴向位置,改变仿生滑翔机器人的俯仰角。横滚调节机构通过电机 驱动偏心电池组绕主轴方向转动,调整整体重心相对于浮心的横向位置,实现横滚姿态 调节4。 (3)浮力驱动系统:主要由高压泵、各类液压阀体、内部油腔和外部皮囊构成,外 部皮囊在前舱帽内与外部水体接触,其中的压力油在内外油囊和大气压力的作用下流入 内部油囊,内部油腔中的压力油可以经过高压泵被抽取到外部皮囊中46,换向阀可以用 来控制油的流量和截止,单向阀保证了液体只能从内部油腔流向外部油囊,通过外皮囊 自身体积的变化,就能使得整个滑翔机器人的净浮力发生变化,从而实现浮力调节与控 制。 (4)仿生驱动机构:通过舵机输出驱动尾鳍灵活摆动,并使用带有隔离罩的磁耦合 联轴器实现壳体内部与外部水环境的严格密封,通过使得尾鳍以一定的尾鳍角处于偏置 状态,来改变水下仿生滑翔机器人的水动力和水动力矩。 (⑤)控制与通讯系统:控制部分以微处理器为核心,主要用来处理与运动相关的传 感器数据,完成水下仿生滑翔机器人的接受指令、轨迹规划和导航4。 (6)传感部件:传感部件由任务传感器(如温度传感器、深度传感器、环境监测传 感器CTD等)、数据存储单元构成,用来测量水下数据,由于仿生滑翔机器人在运动过 程中,壳体表面会产生约40mm厚的层流,为了获得精准的数据,应使传感器突出层流 厚度,并且考虑到其水动力特性,应将传感器置于仿生滑翔机器人的背部靠后方较为合 适。 前舱帽 前舱耐压壳体 传感电子舱 后舱耐压壳体 ,尾舵 浮力驱 动模块 俯仰姿态 调整机构 机翼(内 横滚姿态 含天线) 仿生推 调整机构 进模块 图2.2载体外形和结构布局图 2.3水下仿生滑翔机器人外形设计 本节首先对仿生滑翔机器人的外壳进行优化设计,外壳主体部分需满足承受海底 -9- 万方数据
兰州交通大学硕士学位论文 - 9 - 从而调整整体重心的轴向位置,改变仿生滑翔机器人的俯仰角。横滚调节机构通过电机 驱动偏心电池组绕主轴方向转动,调整整体重心相对于浮心的横向位置,实现横滚姿态 调节[45]。 (3) 浮力驱动系统:主要由高压泵、各类液压阀体、内部油腔和外部皮囊构成,外 部皮囊在前舱帽内与外部水体接触,其中的压力油在内外油囊和大气压力的作用下流入 内部油囊,内部油腔中的压力油可以经过高压泵被抽取到外部皮囊中[46],换向阀可以用 来控制油的流量和截止,单向阀保证了液体只能从内部油腔流向外部油囊,通过外皮囊 自身体积的变化,就能使得整个滑翔机器人的净浮力发生变化,从而实现浮力调节与控 制。 (4) 仿生驱动机构:通过舵机输出驱动尾鳍灵活摆动,并使用带有隔离罩的磁耦合 联轴器实现壳体内部与外部水环境的严格密封,通过使得尾鳍以一定的尾鳍角处于偏置 状态,来改变水下仿生滑翔机器人的水动力和水动力矩。 (5) 控制与通讯系统:控制部分以微处理器为核心,主要用来处理与运动相关的传 感器数据,完成水下仿生滑翔机器人的接受指令、轨迹规划和导航[45]。 (6) 传感部件:传感部件由任务传感器(如温度传感器、深度传感器、环境监测传 感器 CTD 等)、数据存储单元构成,用来测量水下数据,由于仿生滑翔机器人在运动过 程中,壳体表面会产生约 40mm 厚的层流,为了获得精准的数据,应使传感器突出层流 厚度,并且考虑到其水动力特性,应将传感器置于仿生滑翔机器人的背部靠后方较为合 适。 前舱帽 浮力驱 动模块 俯仰姿态 调整机构 机翼(内 含天线) 横滚姿态 调整机构 尾舵 仿生推 进模块 传感电子舱 后舱耐压壳体 前舱耐压壳体 图 2.2 载体外形和结构布局图 2.3 水下仿生滑翔机器人外形设计 本节首先对仿生滑翔机器人的外壳进行优化设计,外壳主体部分需满足承受海底 万方数据

水下仿生滑翔机器人机构设计及水动力学分析 1500m水压的要求,它决定了仿生滑翔机器人的水动力特性,合理的外形设计能够使得 仿生滑翔机器人运动时受到较小的阻力。 然后设计了前舱帽,主要用来保护内部的外皮囊且和后面的舱体隔离,同时,其外 部结构要保证整个水下仿生滑翔机器人的流线型外形。 最后详述了仿生滑翔器水平升降翼和垂直稳定翼的设计。 2.3.1壳体结构设计 由于仿生滑翔器的滑翔模式功能与已有滑翔器比较类似,所以此次设计的仿生滑翔 机器人的质量与已有的滑翔器类似,选总质量为M=50kg。根据总质量M,初步估算仿 生滑翔机器人在水中成中性时所需的排水量 V=M=50kg=50L (2.1) p 1kg/L 在已知载体总排水量的情况下,考虑到平均水阻力系数最小,对滑翔攻角小范围波 动不敏感等因素,最终将整个壳体外形选择为中间舱段为圆柱壳体一端为半椭球壳体设 计,另一端为了拆装方便且密封效果良好,选用后盖拧动设计,并且在后舱耐压壳体与 后盖结合处还放置了O型密封圈,实现严密防水。为了保证中体排水量为50kg,从内 部装配需要空间和原料尺寸考虑,初步选择壳体中段圆柱部分外径为200mm。通过分 析相同直径下阻力系数关于壳体两端椭圆偏心率的关系,兼顾内部构造与内部空间的利 用情况,最终选择偏心率e为3.5,壳体总长度1558mm。如图2.3所示。 图2.3水下仿生滑翔机器人壳体基本外形 当前,Slocum和Spray的壳体材料为6061铝合金,这种材料耐压和耐腐蚀能力强, 参考国外滑翔器的选材,本文选取6061-T6铝合金材料47。水下仿生滑翔机器人的壳体 因为要承受深海压力,所以需要校核其厚度。 按照第三和第四强度理论来设计校核耐压壳体的壁厚。首先,壳体轴向应力σ,、周 向应力σ,和径向应力σ,的计算公式如下: -10- 万方数据
水下仿生滑翔机器人机构设计及水动力学分析 - 10 - 1500m 水压的要求,它决定了仿生滑翔机器人的水动力特性,合理的外形设计能够使得 仿生滑翔机器人运动时受到较小的阻力。 然后设计了前舱帽,主要用来保护内部的外皮囊且和后面的舱体隔离,同时,其外 部结构要保证整个水下仿生滑翔机器人的流线型外形。 最后详述了仿生滑翔器水平升降翼和垂直稳定翼的设计。 2.3.1 壳体结构设计 由于仿生滑翔器的滑翔模式功能与已有滑翔器比较类似,所以此次设计的仿生滑翔 机器人的质量与已有的滑翔器类似,选总质量为 M=50kg。根据总质量 M,初步估算仿 生滑翔机器人在水中成中性时所需的排水量 50kg 50L 1kg/L M V ρ == = (2.1) 在已知载体总排水量的情况下,考虑到平均水阻力系数最小,对滑翔攻角小范围波 动不敏感等因素,最终将整个壳体外形选择为中间舱段为圆柱壳体一端为半椭球壳体设 计,另一端为了拆装方便且密封效果良好,选用后盖拧动设计,并且在后舱耐压壳体与 后盖结合处还放置了 O 型密封圈,实现严密防水。为了保证中体排水量为 50kg,从内 部装配需要空间和原料尺寸考虑,初步选择壳体中段圆柱部分外径为 200mm。通过分 析相同直径下阻力系数关于壳体两端椭圆偏心率的关系,兼顾内部构造与内部空间的利 用情况,最终选择偏心率 e 为 3.5,壳体总长度 1558mm。如图 2.3 所示。 图2.3 水下仿生滑翔机器人壳体基本外形 当前,Slocum 和 Spray 的壳体材料为 6061 铝合金,这种材料耐压和耐腐蚀能力强, 参考国外滑翔器的选材,本文选取 6061-T6 铝合金材料[47]。水下仿生滑翔机器人的壳体 因为要承受深海压力,所以需要校核其厚度。 按照第三和第四强度理论来设计校核耐压壳体的壁厚。首先,壳体轴向应力σ x 、周 向应力σ t 和径向应力σ r 的计算公式如下: 万方数据
兰州交通大学硕士学位论文 os心 46 gs (2.2) 28 0,=0 上式中,p为壳体承受的压力:为壳体直径:δ为壳体厚度。 根据第三强度理论,壳体需满足如下强度条件: 0,-0,≤[o] (2.3) 因为海底1500m处水压为15MP,因此p=15MP,将D=200mm,「o]=230MPa及 p带入式组(2.2)、式(2.3),可求得6mm=6.5mm。 如果根据第四强度理论,壳体需满足如下强度条件: V5、p -sla] (2.4) 4 将D=200mm,p=15MP,[o]=230MPa,可求得6mm=5.6mm。 根据以上计算,并且为了更加安全可靠,本文取耐压壳体的厚度为8mm,并对壳体 表面进行硬质氧化和喷漆处理,以便防止海水腐蚀耐压壳体,另外为了便于在壳体内部 安装机构和方便加工,可将壳体分为五段,前舱帽椭圆球短轴半径为100mm,偏心率 为3.5,壁厚为8mm,前舱耐压壳体300mm,传感电子仓474mm,后舱耐压壳体352.5mm, 尾端壳体140mm,由对壳体的压力分析可以看到,两端受压较低,变形较小,而中间 部分受压较高,变形较大,为了使得整个壳体受力相对均匀,壳体连接组件由加强筋板、 密封圈、箍瓦、定位键、拉紧钢带以及拉紧扣等零部件组成纠。 2.3.2前舱帽设计 前舱帽用于安装外部皮囊和部分测量传感器且和后面舱段分离,其结构设计如图 2.4所示,其中,为了保证整个仿生滑翔机器人的流线型外形,在前舱帽上设置了引流 孔,通过引流孔外部水体能够直接与外皮囊相接触,外皮囊内部的液态介质是通过位于 加强筋板中间的孔与内部单向阀、换向阀、液压泵及内油腔连接的。 2.3.3水平升降翼设计 升降翼用于在浮力驱动模式下提供升力,对于仿生滑翔机器人能否实现滑翔运动影 响重大,而滑翔比和升阻比是衡量滑翔性能的两个主要指标,当滑翔比和升阻比较高时, 滑翔机器人能够得到较好的滑翔运动,因此为了提高滑翔比和升阻比,应合理选择升降 -11- 万方数据
兰州交通大学硕士学位论文 - 11 - 4 2 0 x t r pD pD σ δ σ δ σ = = = (2.2) 上式中, p 为壳体承受的压力;D为壳体直径;δ 为壳体厚度。 根据第三强度理论,壳体需满足如下强度条件: [ ] σ t r −σ σ ≤ (2.3) 因为海底1500m处水压为15MP,因此 p = 15MP,将 D = 200mm,[ ] 230 MPa σ = 及 p带入式组(2.2)、式(2.3),可求得 min δ = 6.5mm 。 如果根据第四强度理论,壳体需满足如下强度条件: 3 [ ] 4 pD σ δ × ≤ (2.4) 将 D = 200mm, p = 15MP,[ ] 230MPa σ = ,可求得 min δ = 5.6mm 。 根据以上计算,并且为了更加安全可靠,本文取耐压壳体的厚度为8mm ,并对壳体 表面进行硬质氧化和喷漆处理,以便防止海水腐蚀耐压壳体,另外为了便于在壳体内部 安装机构和方便加工,可将壳体分为五段,前舱帽椭圆球短轴半径为 100 mm,偏心率 为 3.5,壁厚为 8mm,前舱耐压壳体 300mm,传感电子仓 474mm,后舱耐压壳体 352.5mm, 尾端壳体 140mm,由对壳体的压力分析可以看到,两端受压较低,变形较小,而中间 部分受压较高,变形较大,为了使得整个壳体受力相对均匀,壳体连接组件由加强筋板、 密封圈、箍瓦、定位键、拉紧钢带以及拉紧扣等零部件组成[44]。 2.3.2 前舱帽设计 前舱帽用于安装外部皮囊和部分测量传感器且和后面舱段分离,其结构设计如图 2.4 所示,其中,为了保证整个仿生滑翔机器人的流线型外形,在前舱帽上设置了引流 孔,通过引流孔外部水体能够直接与外皮囊相接触,外皮囊内部的液态介质是通过位于 加强筋板中间的孔与内部单向阀、换向阀、液压泵及内油腔连接的。 2.3.3 水平升降翼设计 升降翼用于在浮力驱动模式下提供升力,对于仿生滑翔机器人能否实现滑翔运动影 响重大,而滑翔比和升阻比是衡量滑翔性能的两个主要指标,当滑翔比和升阻比较高时, 滑翔机器人能够得到较好的滑翔运动,因此为了提高滑翔比和升阻比,应合理选择升降 万方数据
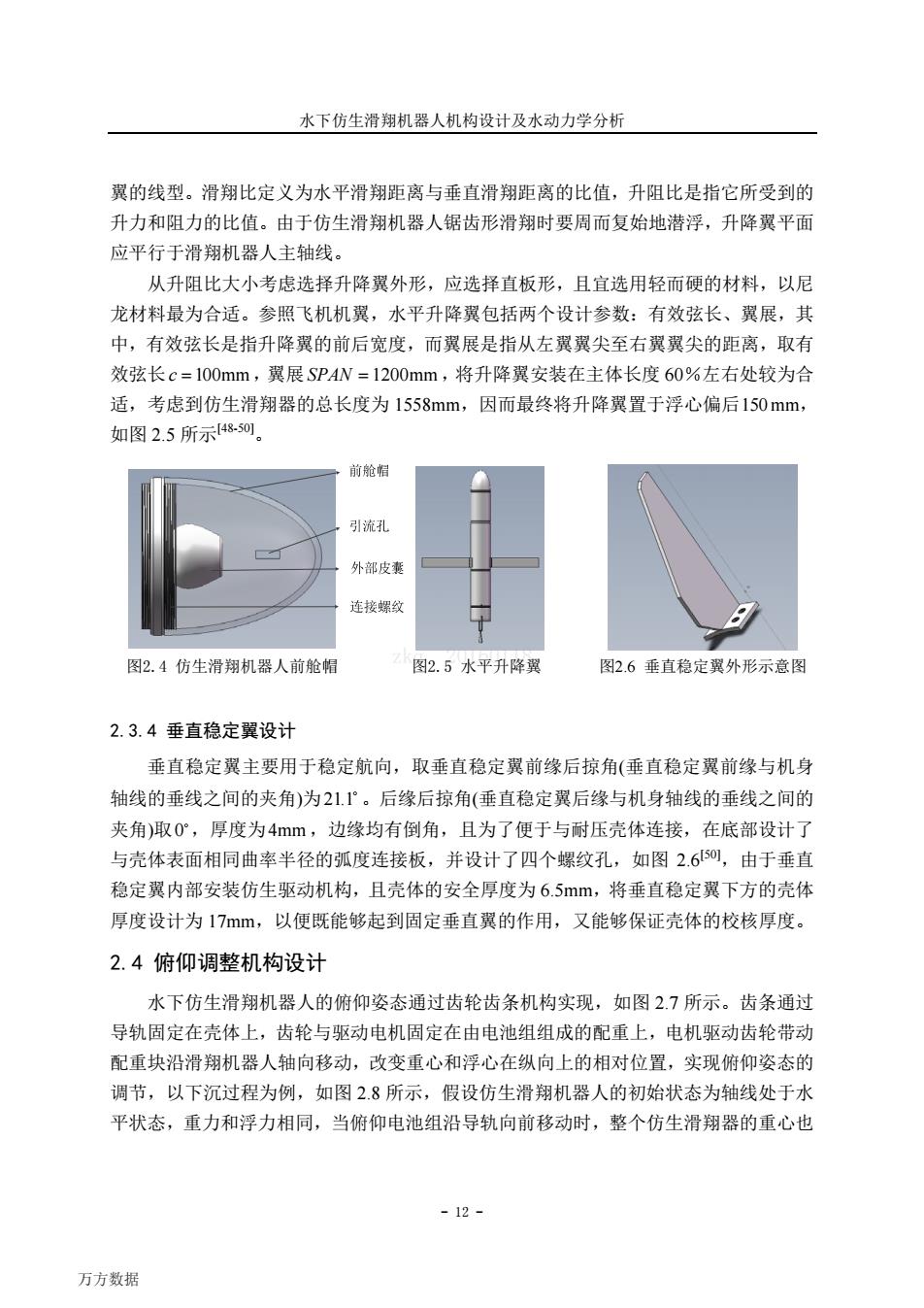
水下仿生滑翔机器人机构设计及水动力学分析 翼的线型。滑翔比定义为水平滑翔距离与垂直滑翔距离的比值,升阻比是指它所受到的 升力和阻力的比值。由于仿生滑翔机器人锯齿形滑翔时要周而复始地潜浮,升降翼平面 应平行于滑翔机器人主轴线。 从升阻比大小考虑选择升降翼外形,应选择直板形,且宜选用轻而硬的材料,以尼 龙材料最为合适。参照飞机机翼,水平升降翼包括两个设计参数:有效弦长、翼展,其 中,有效弦长是指升降翼的前后宽度,而翼展是指从左翼翼尖至右翼翼尖的距离,取有 效弦长c=100mm,翼展SPAN=1200mm,将升降翼安装在主体长度60%左右处较为合 适,考虑到仿生滑翔器的总长度为1558mm,因而最终将升降翼置于浮心偏后150mm, 如图2.5所示4850 前舱帽 引流孔 外部皮囊 连接螺纹 图2.4仿生滑翔机器人前舱帽 图2.5水平升降翼 图2.6垂直稳定翼外形示意图 2.3.4垂直稳定翼设计 垂直稳定翼主要用于稳定航向,取垂直稳定翼前缘后掠角(垂直稳定翼前缘与机身 轴线的垂线之间的夹角)为211°。后缘后掠角(垂直稳定翼后缘与机身轴线的垂线之间的 夹角)取0°,厚度为4mm,边缘均有倒角,且为了便于与耐压壳体连接,在底部设计了 与壳体表面相同曲率半径的弧度连接板,并设计了四个螺纹孔,如图2.650,由于垂直 稳定翼内部安装仿生驱动机构,且壳体的安全厚度为6.5mm,将垂直稳定翼下方的壳体 厚度设计为17m,以便既能够起到固定垂直翼的作用,又能够保证壳体的校核厚度。 2.4俯仰调整机构设计 水下仿生滑翔机器人的俯仰姿态通过齿轮齿条机构实现,如图27所示。齿条通过 导轨固定在壳体上,齿轮与驱动电机固定在由电池组组成的配重上,电机驱动齿轮带动 配重块沿滑翔机器人轴向移动,改变重心和浮心在纵向上的相对位置,实现俯仰姿态的 调节,以下沉过程为例,如图2.8所示,假设仿生滑翔机器人的初始状态为轴线处于水 平状态,重力和浮力相同,当俯仰电池组沿导轨向前移动时,整个仿生滑翔器的重心也 -12- 万方数据
水下仿生滑翔机器人机构设计及水动力学分析 - 12 - 翼的线型。滑翔比定义为水平滑翔距离与垂直滑翔距离的比值,升阻比是指它所受到的 升力和阻力的比值。由于仿生滑翔机器人锯齿形滑翔时要周而复始地潜浮,升降翼平面 应平行于滑翔机器人主轴线。 从升阻比大小考虑选择升降翼外形,应选择直板形,且宜选用轻而硬的材料,以尼 龙材料最为合适。参照飞机机翼,水平升降翼包括两个设计参数:有效弦长、翼展,其 中,有效弦长是指升降翼的前后宽度,而翼展是指从左翼翼尖至右翼翼尖的距离,取有 效弦长c = 100mm,翼展SPAN = 1200mm,将升降翼安装在主体长度 60%左右处较为合 适,考虑到仿生滑翔器的总长度为 1558mm,因而最终将升降翼置于浮心偏后150mm, 如图 2.5 所示[48-50]。 图2.4 仿生滑翔机器人前舱帽 图2.5 水平升降翼 图2.6 垂直稳定翼外形示意图 2.3.4 垂直稳定翼设计 垂直稳定翼主要用于稳定航向,取垂直稳定翼前缘后掠角(垂直稳定翼前缘与机身 轴线的垂线之间的夹角)为21.1D 。后缘后掠角(垂直稳定翼后缘与机身轴线的垂线之间的 夹角)取0D ,厚度为4mm,边缘均有倒角,且为了便于与耐压壳体连接,在底部设计了 与壳体表面相同曲率半径的弧度连接板,并设计了四个螺纹孔,如图 2.6[50],由于垂直 稳定翼内部安装仿生驱动机构,且壳体的安全厚度为 6.5mm,将垂直稳定翼下方的壳体 厚度设计为 17mm,以便既能够起到固定垂直翼的作用,又能够保证壳体的校核厚度。 2.4 俯仰调整机构设计 水下仿生滑翔机器人的俯仰姿态通过齿轮齿条机构实现,如图 2.7 所示。齿条通过 导轨固定在壳体上,齿轮与驱动电机固定在由电池组组成的配重上,电机驱动齿轮带动 配重块沿滑翔机器人轴向移动,改变重心和浮心在纵向上的相对位置,实现俯仰姿态的 调节,以下沉过程为例,如图 2.8 所示,假设仿生滑翔机器人的初始状态为轴线处于水 平状态,重力和浮力相同,当俯仰电池组沿导轨向前移动时,整个仿生滑翔器的重心也 zkq 20160118 万方数据