
兰州交通大学硕士学位论文 表1.1三种电动水下滑翔器的性能参数 特性 Seaglide Spray Slocum(电动) 机体(L×D×M) 180cmx30cmx52kg 200cm×20cm×5lkg 150cmx21cm×52kg 机翼(展长×弦长) 100cm×16cm 98cm×10cm 98cmx10cm 电源 锂电池 锂电池 碱性电池 通讯 Iridium通讯 Iridium通讯 局域网+Iridium通讯 最大潜深 1000m 1500m 200m 最大前向航速 45cm/s 45cm/s 40cm/s 肺活量 840cc 900cc 450cc 液压泵形式 多冲程柱塞泵 多冲程柱塞泵 单冲程柱塞泵 续航力 续航范围4600km 续航范围7000km 续航范围500km Wbb等人在完成电驱动水下滑翔器的试验后,又把热机原理引入水下滑翔器,制 作了温差能驱动的水下滑翔器Slocum Thermal Glider,.Slocum Thermal Glider样机如图 1.3所示22。 1.3 Slocum Thermal Glider 图l.4 Deepglider 图1.5 UnderDOG 2006年,美国华盛顿大学应用物理研究室设计了一种旨在潜深6000米的水下滑翔 器Deepglider,.由于使用了碳纤维壳体,该滑翔器至2007年3月已成功完成了实验室水 下4000米测试,如图1.4所示。 新西兰的Otago大学设计了一种能够潜深5000米的水下滑翔器UnderDOG,该滑 翔器携带了温度、盐度等多种水下传感器来执行水下任务,如图1.5所示。 普林斯顿大学Leonard团队等针对水下滑翔器动力学建模、控制器设计以及多水下 滑翔机器人合作控制等问题进行了研究,并在海洋环境监测领域得到了应用3,24 我国在水下滑翔器的技术研究上尚还处于样机试验阶段。2005年7月,国内天津大 -3- 万方数据
兰州交通大学硕士学位论文 - 3 - 表 1.1 三种电动水下滑翔器的性能参数 特性 Seaglide Spray Slocum(电动) 机体( LDM × × ) 180 30 52 cm cm kg × × 200 20 51 cm cm kg × × 150 21 52 cm cm kg × × 机翼(展长×弦长) 100 16 cm cm × 98 10 cm cm × 98 10 cm cm × 电源 锂电池 锂电池 碱性电池 通讯 Iridium 通讯 Iridium 通讯 局域网+Iridium 通讯 最大潜深 1000m 1500m 200m 最大前向航速 45cm/s 45cm/s 40cm/s 肺活量 840cc 900cc 450cc 液压泵形式 多冲程柱塞泵 多冲程柱塞泵 单冲程柱塞泵 续航力 续航范围4600km 续航范围7000km 续航范围500km Webb 等人在完成电驱动水下滑翔器的试验后,又把热机原理引入水下滑翔器,制 作了温差能驱动的水下滑翔器 Slocum Thermal Glider,Slocum Thermal Glider 样机如图 1.3 所示[22]。 图 1.3 Slocum Thermal Glider 图 1.4 Deepglider 图 1.5 UnderDOG 2006 年,美国华盛顿大学应用物理研究室设计了一种旨在潜深 6000 米的水下滑翔 器 Deepglider,由于使用了碳纤维壳体,该滑翔器至 2007 年 3 月已成功完成了实验室水 下 4000 米测试,如图 1.4 所示。 新西兰的 Otago 大学设计了一种能够潜深 5000 米的水下滑翔器 UnderDOG,该滑 翔器携带了温度、盐度等多种水下传感器来执行水下任务,如图 1.5 所示。 普林斯顿大学 Leonard 团队等针对水下滑翔器动力学建模、控制器设计以及多水下 滑翔机器人合作控制等问题进行了研究,并在海洋环境监测领域得到了应用[23,24]。 我国在水下滑翔器的技术研究上尚还处于样机试验阶段。2005 年 7 月,国内天津大 万方数据
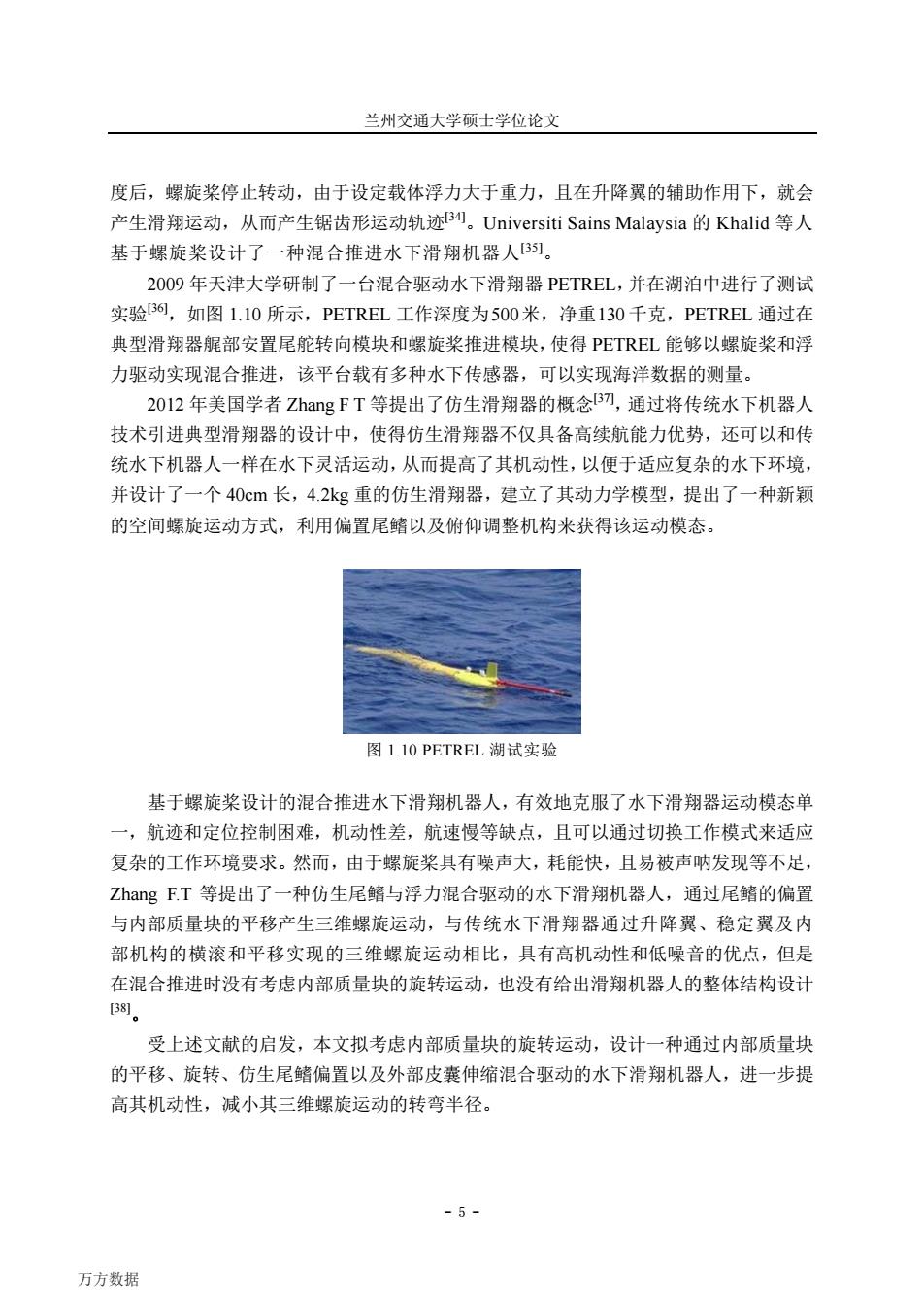
水下仿生滑翔机器人机构设计及水动力学分析 学在浙江省千岛湖内进行了水下试验,如图1.6所示25-2刀。中科院沈阳自动化研究所也 针对水下滑翔器展开了研究,于2005年10月成功进行了湖上试验,如图1.7所示28,2。 西北工业大学建立了AUG动力学模型并进行了仿真研究,哈尔滨工业大学、浙江大学、 上海交通大学也对AUG进行了研究与分析B0-32。 图1.6天津大学温差能滑翔器 图1.7中科院水下滑翔器样机 1.3混合驱动水下滑翔器的研究状况 水下滑翔机器人虽然能够用于完成长时序、大范围海洋环境监测和调查任务,但存 在航迹和定位控制困难,机动性差等缺点。为了解决上述问题,实现对水中目标的精确 监测和跟踪,国内外学者针对混合推进模式的水下滑翔机器人展开了研究。 2004年加拿大研究者R.Bachmayer和美国学者N.E.Leonard等人设计了Hybrid Glider的概念图,如图1.8所示,Hybrid Glider机翼为大翼展滑翔型机翼,尾部安装了 螺旋桨推进器3]。 图l.8 Hybrid Glider概念设计图 图1.9 JAMSTEC样机 2006年前后,日本JAMSTEC研制了一台仿Glide型AUV,如图1.9所示,为了增 大其航程,在AUV基础上添加了水平升降翼,该航行器采用了流线型外形,可以以滑 翔和螺旋桨两种驱动方式推进。该混合型AUV利用螺旋桨来实现下潜,当到达预定深 -4- 万方数据
水下仿生滑翔机器人机构设计及水动力学分析 - 4 - 学在浙江省千岛湖内进行了水下试验,如图 1.6 所示[25-27]。中科院沈阳自动化研究所也 针对水下滑翔器展开了研究,于 2005 年 10 月成功进行了湖上试验,如图 1.7 所示[28,29]。 西北工业大学建立了 AUG 动力学模型并进行了仿真研究,哈尔滨工业大学、浙江大学、 上海交通大学也对 AUG 进行了研究与分析[30-32]。 图 1.6 天津大学温差能滑翔器 图 1.7 中科院水下滑翔器样机 1.3 混合驱动水下滑翔器的研究状况 水下滑翔机器人虽然能够用于完成长时序、大范围海洋环境监测和调查任务,但存 在航迹和定位控制困难,机动性差等缺点。为了解决上述问题,实现对水中目标的精确 监测和跟踪,国内外学者针对混合推进模式的水下滑翔机器人展开了研究。 2004 年加拿大研究者 R.Bachmayer 和美国学者 N.E.Leonard 等人设计了 Hybrid Glider 的概念图,如图 1.8 所示,Hybrid Glider 机翼为大翼展滑翔型机翼,尾部安装了 螺旋桨推进器[33]。 图 1.8 Hybrid Glider 概念设计图 图 1.9 JAMSTEC 样机 2006 年前后,日本 JAMSTEC 研制了一台仿 Glide 型 AUV,如图 1.9 所示,为了增 大其航程,在 AUV 基础上添加了水平升降翼,该航行器采用了流线型外形,可以以滑 翔和螺旋桨两种驱动方式推进。该混合型 AUV 利用螺旋桨来实现下潜,当到达预定深 万方数据
兰州交通大学硕士学位论文 度后,螺旋桨停止转动,由于设定载体浮力大于重力,且在升降翼的辅助作用下,就会 产生滑翔运动,从而产生锯齿形运动轨迹B4。Universiti Sains Malaysia的Khalid等人 基于螺旋桨设计了一种混合推进水下滑翔机器人[B]。 2009年天津大学研制了一台混合驱动水下滑翔器PET℉EL,并在湖泊中进行了测试 实验B6,如图1.10所示,PETREL工作深度为500米,净重130千克,PETREL通过在 典型滑翔器艉部安置尾舵转向模块和螺旋桨推进模块,使得PET℉EL能够以螺旋桨和浮 力驱动实现混合推进,该平台载有多种水下传感器,可以实现海洋数据的测量。 2012年美国学者Zhang FT等提出了仿生滑翔器的概念B7,通过将传统水下机器人 技术引进典型滑翔器的设计中,使得仿生滑翔器不仅具备高续航能力优势,还可以和传 统水下机器人一样在水下灵活运动,从而提高了其机动性,以便于适应复杂的水下环境, 并设计了一个40cm长,4.2kg重的仿生滑翔器,建立了其动力学模型,提出了一种新颖 的空间螺旋运动方式,利用偏置尾鳍以及俯仰调整机构来获得该运动模态。 图1.10 PETREL湖试实验 基于螺旋桨设计的混合推进水下滑翔机器人,有效地克服了水下滑翔器运动模态单 一,航迹和定位控制困难,机动性差,航速慢等缺点,且可以通过切换工作模式来适应 复杂的工作环境要求。然而,由于螺旋桨具有噪声大,耗能快,且易被声呐发现等不足, Zhang F.T等提出了一种仿生尾鳍与浮力混合驱动的水下滑翔机器人,通过尾鳍的偏置 与内部质量块的平移产生三维螺旋运动,与传统水下滑翔器通过升降翼、稳定翼及内 部机构的横滚和平移实现的三维螺旋运动相比,具有高机动性和低噪音的优点,但是 在混合推进时没有考虑内部质量块的旋转运动,也没有给出滑翔机器人的整体结构设计 。 受上述文献的启发,本文拟考虑内部质量块的旋转运动,设计一种通过内部质量块 的平移、旋转、仿生尾鳍偏置以及外部皮囊伸缩混合驱动的水下滑翔机器人,进一步提 高其机动性,减小其三维螺旋运动的转弯半径。 -5- 万方数据
兰州交通大学硕士学位论文 - 5 - 度后,螺旋桨停止转动,由于设定载体浮力大于重力,且在升降翼的辅助作用下,就会 产生滑翔运动,从而产生锯齿形运动轨迹[34]。Universiti Sains Malaysia 的 Khalid 等人 基于螺旋桨设计了一种混合推进水下滑翔机器人[35]。 2009 年天津大学研制了一台混合驱动水下滑翔器 PETREL,并在湖泊中进行了测试 实验[36],如图 1.10 所示,PETREL 工作深度为500米,净重130 千克,PETREL 通过在 典型滑翔器艉部安置尾舵转向模块和螺旋桨推进模块,使得 PETREL 能够以螺旋桨和浮 力驱动实现混合推进,该平台载有多种水下传感器,可以实现海洋数据的测量。 2012 年美国学者 Zhang F T 等提出了仿生滑翔器的概念[37],通过将传统水下机器人 技术引进典型滑翔器的设计中,使得仿生滑翔器不仅具备高续航能力优势,还可以和传 统水下机器人一样在水下灵活运动,从而提高了其机动性,以便于适应复杂的水下环境, 并设计了一个 40cm 长,4.2kg 重的仿生滑翔器,建立了其动力学模型,提出了一种新颖 的空间螺旋运动方式,利用偏置尾鳍以及俯仰调整机构来获得该运动模态。 图 1.10 PETREL 湖试实验 基于螺旋桨设计的混合推进水下滑翔机器人,有效地克服了水下滑翔器运动模态单 一,航迹和定位控制困难,机动性差,航速慢等缺点,且可以通过切换工作模式来适应 复杂的工作环境要求。然而,由于螺旋桨具有噪声大,耗能快,且易被声呐发现等不足, Zhang F.T 等提出了一种仿生尾鳍与浮力混合驱动的水下滑翔机器人,通过尾鳍的偏置 与内部质量块的平移产生三维螺旋运动,与传统水下滑翔器通过升降翼、稳定翼及内 部机构的横滚和平移实现的三维螺旋运动相比,具有高机动性和低噪音的优点,但是 在混合推进时没有考虑内部质量块的旋转运动,也没有给出滑翔机器人的整体结构设计 [38]。 受上述文献的启发,本文拟考虑内部质量块的旋转运动,设计一种通过内部质量块 的平移、旋转、仿生尾鳍偏置以及外部皮囊伸缩混合驱动的水下滑翔机器人,进一步提 高其机动性,减小其三维螺旋运动的转弯半径。 万方数据
水下仿生滑翔机器人机构设计及水动力学分析 1.4课题主要研究内容 本文拟设计一种具有仿生尾鳍的水下滑翔机器人混合驱动机构,通过内部质量块的 平移、旋转、仿生尾鳍的偏置以及外部皮囊的伸缩可实现滑翔机器人的小半径三维螺旋 运动和定常滑翔运动。 全文内容安排如下: (1)水下仿生滑翔机器人结构设计。 (2)水下仿生滑翔机器人水动力学建模。 (3)水下仿生滑翔机器人行为分析与仿真。 -6- 万方数据
水下仿生滑翔机器人机构设计及水动力学分析 - 6 - 1.4 课题主要研究内容 本文拟设计一种具有仿生尾鳍的水下滑翔机器人混合驱动机构,通过内部质量块的 平移、旋转、仿生尾鳍的偏置以及外部皮囊的伸缩可实现滑翔机器人的小半径三维螺旋 运动和定常滑翔运动。 全文内容安排如下: (1) 水下仿生滑翔机器人结构设计。 (2) 水下仿生滑翔机器人水动力学建模。 (3) 水下仿生滑翔机器人行为分析与仿真。 万方数据
兰州交通大学硕士学位论文 2水下仿生滑翔机器人结构设计 通常地,水下滑翔机器人由耐压壳体、俯仰调节机构、浮力调节机构、横滚调节机 构、传感电子舱等部分组成。为实现混合驱动,使得所设计的滑翔机器人能够利用仿生 尾鳍对其水动力和水动力矩的影响更加高效地实现转弯模态,或在目标点附近辅助精确 到达定点位置,本文在机构设计中增加了仿生驱动尾鳍,同时在浮力调节装置中设计了 利用内外皮囊的压力差驱动外部皮囊中的油液自动流入内部油腔中的机构,整体结构布 局见图2.2。 水下仿生滑翔机器人的总体设计目标是研制同时具有仿生推进模式和滑翔推进模 式的新型水下机器人,实现混合驱动是其主要设计目标。水下仿生滑翔机器人的性能指 标一般包括航行深度、排水量、航程、航速等,本文模型拟定潜深1500m,重量50Kg, 且具有较小的外形阻力。为了提高能源利用率,一般不宜使得仿生推进方式实际工作时 间超过其总设计时间的10%。 2.1水下滑翔器的工作原理 水下滑翔器运动模态主要包括沿锯齿形轨迹的周期性滑翔运动和三维螺旋回转运 动。如图2.1所示,水下滑翔器在锯齿形滑翔中一个周期内的运动过程为39: 1)通过电机驱动平移质量块沿主轴向艏部移动,使得水下滑翔器逐渐的转变位姿, 艏部向下倾斜: 2)通过浮力调整系统中的液压回路使得外部皮囊中的液压油回流,从而外部皮囊 体积缩小,浮心减小,水下滑翔器重力大于浮力,滑翔器开始缓缓下潜,并慢慢至定常 滑翔运动状态: 3)当到达目标深度时,通过上述液压回路使得外部皮囊胀大,浮力增大,并至和重 力近似相等,水下滑翔器开始在外部水阻力作用下减速下潜至停止滑翔: 4)调整平移质量块向艉部移动,改变水下滑翔器俯仰位姿,使得艏部慢慢上升: 5)通过调节浮力驱动装置,使得外部皮囊胀大,浮力增大,水下滑翔器浮力大于 重力,滑翔器开始上浮,并逐渐地达到定常滑翔运动状态: 6)当水下滑翔器运动至水面时,一个周期的滑翔运动结束,垂直面内的锯齿形滑 翔运动通过连续重复上述过程即可实现[o。 水下滑翔器实现三维螺旋回转运动的过程为: .同上1)、2)中所述方法使得滑翔器在负浮力作用下以艏下艉上姿态开始慢慢下 潜; -7- 万方数据
兰州交通大学硕士学位论文 - 7 - 2 水下仿生滑翔机器人结构设计 通常地,水下滑翔机器人由耐压壳体、俯仰调节机构、浮力调节机构、横滚调节机 构、传感电子舱等部分组成。为实现混合驱动,使得所设计的滑翔机器人能够利用仿生 尾鳍对其水动力和水动力矩的影响更加高效地实现转弯模态,或在目标点附近辅助精确 到达定点位置,本文在机构设计中增加了仿生驱动尾鳍,同时在浮力调节装置中设计了 利用内外皮囊的压力差驱动外部皮囊中的油液自动流入内部油腔中的机构,整体结构布 局见图 2.2。 水下仿生滑翔机器人的总体设计目标是研制同时具有仿生推进模式和滑翔推进模 式的新型水下机器人,实现混合驱动是其主要设计目标。水下仿生滑翔机器人的性能指 标一般包括航行深度、排水量、航程、航速等,本文模型拟定潜深 1500m,重量 50Kg, 且具有较小的外形阻力。为了提高能源利用率,一般不宜使得仿生推进方式实际工作时 间超过其总设计时间的 10%。 2.1 水下滑翔器的工作原理 水下滑翔器运动模态主要包括沿锯齿形轨迹的周期性滑翔运动和三维螺旋回转运 动。如图 2.1 所示,水下滑翔器在锯齿形滑翔中一个周期内的运动过程为[39]: 1) 通过电机驱动平移质量块沿主轴向艏部移动,使得水下滑翔器逐渐的转变位姿, 艏部向下倾斜; 2)通过浮力调整系统中的液压回路使得外部皮囊中的液压油回流,从而外部皮囊 体积缩小,浮心减小,水下滑翔器重力大于浮力,滑翔器开始缓缓下潜,并慢慢至定常 滑翔运动状态; 3) 当到达目标深度时,通过上述液压回路使得外部皮囊胀大,浮力增大,并至和重 力近似相等,水下滑翔器开始在外部水阻力作用下减速下潜至停止滑翔; 4) 调整平移质量块向艉部移动,改变水下滑翔器俯仰位姿,使得艏部慢慢上升; 5) 通过调节浮力驱动装置,使得外部皮囊胀大,浮力增大,水下滑翔器浮力大于 重力,滑翔器开始上浮,并逐渐地达到定常滑翔运动状态; 6) 当水下滑翔器运动至水面时,一个周期的滑翔运动结束,垂直面内的锯齿形滑 翔运动通过连续重复上述过程即可实现[40] 。 水下滑翔器实现三维螺旋回转运动的过程为: a. 同上 1)、2)中所述方法使得滑翔器在负浮力作用下以艏下艉上姿态开始慢慢下 潜; 万方数据