第8卷第5期 智能系统学报 Vol.8 No.5 2013年10月 CAAI Transactions on Intelligent Systems 0ct.2013 D0I:10.3969/i.issn.1673-4785.201302011 网络出版地址:http:/www.cnki.net/kcms/detail/23.1538.TP.20130929.1229.010.html 移动机器人队形控制关键技术及其进展 任立敏2,王伟东1,杜志江 (1.哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江哈尔滨150080:2.北华大学机械工程学院,吉林吉 林132021) 摘要:在明确了多机器人队形控制国内外发展现状的基础上,以地面移动机器人为研究对象,从系统结构、机器人 模型、队形形状表示方法、参考框架及编队控制策略等方面,对多机器人编队控制的研究成果进行了概述.同时,对队 形形状生成、编队跟踪与协调、队形变换与重组以及编队避障等队形控制子问题的国内外研究近况进行了总结和分 析最终指出:研究统一有效的编队控制框架、障碍环境下的队形优化变换、降低系统对通讯能力的要求以及编队控 制在实际物理环境下的应用是移动机器人队形控制领域未来可能的研究主题」 关键词:移动机器人:多机器人:队形控制:关键技术:发展现状 中图分类号:TP242.6文献标志码:A文章编号:1673-4785(2013)05-0381-14 中文引用格式:任立敏,王伟东,杜志江.移动机器人队形控制关键技术及其进展[J].智能系统学报,2013,8(5):381-394. 英文引用格式:REN Limin,WANG Weidong,DU Zhijiang.Key Technologies and development of formation control of mobile ro- bots [J].CAAI Transactions on Intelligent Systems,2013,8(5):381-394. Key technologies and development of formation control of mobile robots REN Limin'.2,WANG Weidong',DU Zhijiang' (1.State Key Laboratory of Robotics and System,Harbin Institute of Technology,Harbin 150080,China;2.College of Mechanical Engineering,Beihua University,Jilin 132021,China) Abstract:On the basis of defining the present development of multi-robot formation control at home and abroad, with ground mobile robots as the research object,the research achievements on the multi-robot formation control are described in aspects of system structure,robot model,the formation shape representation method,reference frame and formation control strategy.In addition,the present domestic and foreign researches on such sub-problems of for- mation control as the generation of formation shape,formation tracking and coordination,formation change,recom- bination and formation,obstacle avoidance are also summarized and analyzed.It is pointed out finally that the uni- form and effective formation control frame,formation optimization and change in the obstacle environment,reducing system requirements on communication and the application of formation control in the actual physical environment are the future possible research topics. Keywords:mobile robot;multi-robot;formation control;key technology;present development 几十年来,队形控制已经成为多机器人系统制问题的挑战及近年来对多机器人系统应用需求的 (muli-robot system,MRS)研究领域中最重要的问 不断增加.上述因素促进了多机器人系统及其队形 题之一.队形控制是指一组机器人向目标点协调运 控制技术不断向前发展.1997年以后,一些机器人研 动的过程中,形成并维持某一队形形状,同时适应当 究工作者对多机器人系统的研究进展进行了全面深 前工作环境的约束(如障碍物或空间的物理限制). 入地总结[3)],其中Chen和Wang于2005年在知名 吸引研究人员对这一问题不断展开深入研究的原因 国际会议ROS上给出了队形控制的详细综述4」 包括来自于生物学的灵感、多机器人系统带来的控 K.Kanjanawanishkul则以面向问题的原则对队形控 制进行了总结).不同于上述文献,本文将研究范围 限制于地面移动机器人地队形控制领域,主要关注 收稿日期:2013-02-23.网络出版日期:2013-09-29. 基金项目:国家自然科学基金资助项目(61105088). 近几年地面移动机器人队形控制相关技术的发展状 通信作者:杜志江.E-mail:Duzj01@hit.cu.cn. 况,对队形控制中涉及到的关键技术及重点研究问
第 8 卷第 5 期 智 能 系 统 学 报 Vol.8 №.5 2013 年 10 月 CAAI Transactions on Intelligent Systems Oct. 2013 DOI:10.3969 / j.issn.1673⁃4785.201302011 网络出版地址:http: / / www.cnki.net / kcms/ detail / 23.1538.TP.20130929.1229.010.html 移动机器人队形控制关键技术及其进展 任立敏1,2 ,王伟东1 ,杜志江1 (1.哈尔滨工业大学 机器人技术与系统国家重点实验室,黑龙江 哈尔滨 150080; 2.北华大学 机械工程学院,吉林 吉 林 132021) 摘 要:在明确了多机器人队形控制国内外发展现状的基础上,以地面移动机器人为研究对象,从系统结构、机器人 模型、队形形状表示方法、参考框架及编队控制策略等方面,对多机器人编队控制的研究成果进行了概述.同时,对队 形形状生成、编队跟踪与协调、队形变换与重组以及编队避障等队形控制子问题的国内外研究近况进行了总结和分 析.最终指出:研究统一有效的编队控制框架、障碍环境下的队形优化变换、降低系统对通讯能力的要求以及编队控 制在实际物理环境下的应用是移动机器人队形控制领域未来可能的研究主题. 关键词:移动机器人;多机器人;队形控制;关键技术;发展现状 中图分类号:TP242.6 文献标志码:A 文章编号:1673⁃4785(2013)05⁃0381⁃14 中文引用格式:任立敏,王伟东,杜志江.移动机器人队形控制关键技术及其进展[J]. 智能系统学报, 2013, 8(5): 381⁃394. 英文引用格式:REN Limin, WANG Weidong, DU Zhijiang. Key Technologies and development of formation control of mobile ro⁃ bots [J]. CAAI Transactions on Intelligent Systems, 2013, 8(5): 381⁃394. Key technologies and development of formation control of mobile robots REN Limin 1,2 , WANG Weidong 1 , DU Zhijiang 1 (1. State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China; 2. College of Mechanical Engineering, Beihua University, Jilin 132021, China) Abstract:On the basis of defining the present development of multi⁃robot formation control at home and abroad, with ground mobile robots as the research object, the research achievements on the multi⁃robot formation control are described in aspects of system structure, robot model, the formation shape representation method, reference frame and formation control strategy. In addition, the present domestic and foreign researches on such sub⁃problems of for⁃ mation control as the generation of formation shape, formation tracking and coordination, formation change, recom⁃ bination and formation, obstacle avoidance are also summarized and analyzed. It is pointed out finally that the uni⁃ form and effective formation control frame, formation optimization and change in the obstacle environment, reducing system requirements on communication and the application of formation control in the actual physical environment are the future possible research topics. Keywords:mobile robot; multi⁃robot; formation control; key technology; present development 收稿日期:2013⁃02⁃23. 网络出版日期:2013⁃09⁃29. 基金项目:国家自然科学基金资助项目(61105088). 通信作者:杜志江. E⁃mail: Duzj01@ hit.edu.cn. 几十年来,队形控制已经成为多机器人系统 (multi⁃robot system, MRS) 研究领域中最重要的问 题之一.队形控制是指一组机器人向目标点协调运 动的过程中,形成并维持某一队形形状,同时适应当 前工作环境的约束(如障碍物或空间的物理限制). 吸引研究人员对这一问题不断展开深入研究的原因 包括来自于生物学的灵感、多机器人系统带来的控 制问题的挑战及近年来对多机器人系统应用需求的 不断增加.上述因素促进了多机器人系统及其队形 控制技术不断向前发展.1997 年以后,一些机器人研 究工作者对多机器人系统的研究进展进行了全面深 入地总结[1⁃3] ,其中 Chen 和 Wang 于 2005 年在知名 国际会议 IROS 上给出了队形控制的详细综述[4] , K. Kanjanawanishkul 则以面向问题的原则对队形控 制进行了总结[5] .不同于上述文献,本文将研究范围 限制于地面移动机器人地队形控制领域,主要关注 近几年地面移动机器人队形控制相关技术的发展状 况,对队形控制中涉及到的关键技术及重点研究问
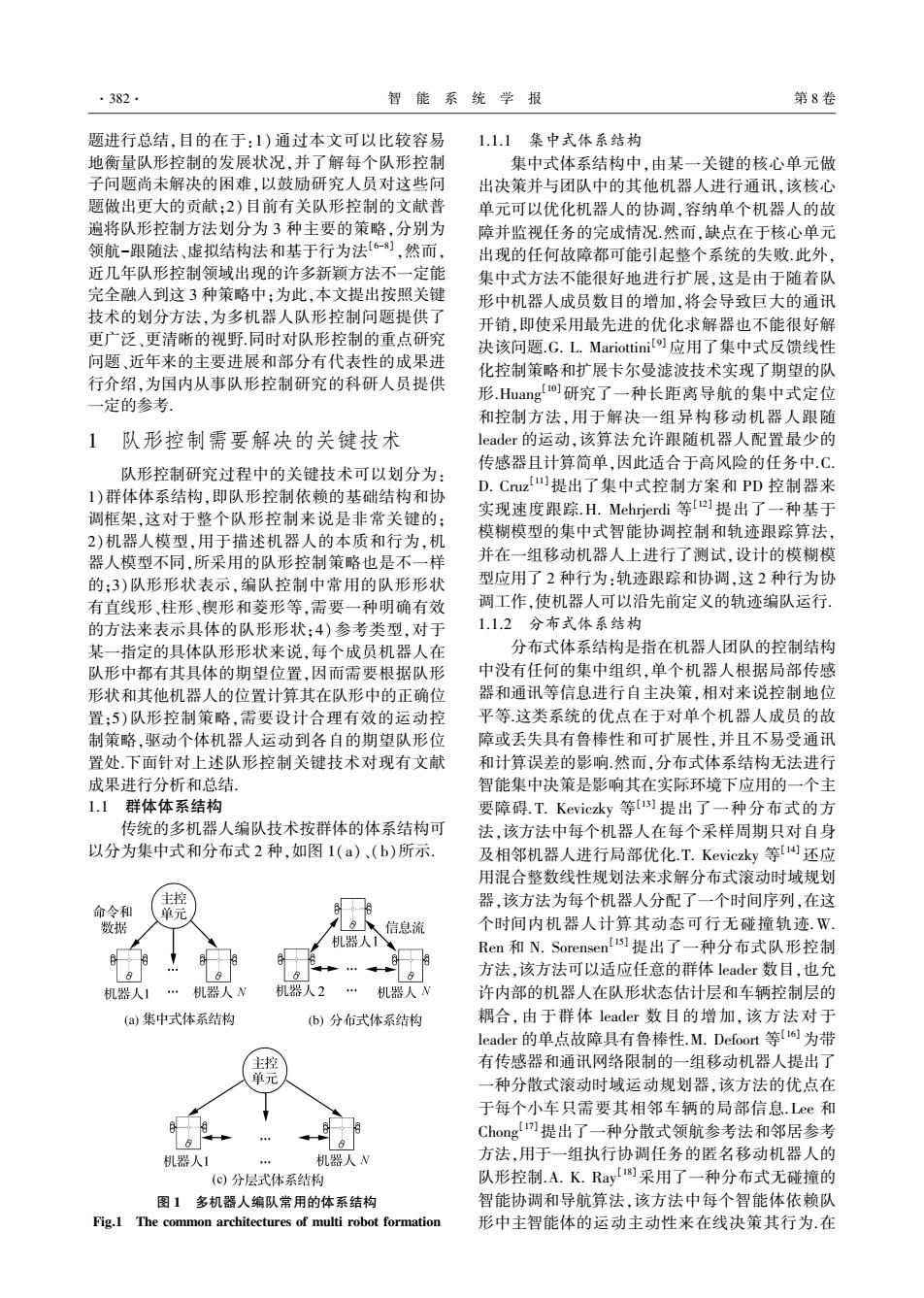
·382 智能系统学报 第8卷 题进行总结,目的在于:1)通过本文可以比较容易 1.1.1集中式体系结构 地衡量队形控制的发展状况,并了解每个队形控制 集中式体系结构中,由某一关键的核心单元做 子问题尚未解决的困难,以鼓励研究人员对这些问 出决策并与团队中的其他机器人进行通讯,该核心 题做出更大的贡献:2)目前有关队形控制的文献普 单元可以优化机器人的协调,容纳单个机器人的故 遍将队形控制方法划分为3种主要的策略,分别为 障并监视任务的完成情况然而,缺点在于核心单元 领航-跟随法、虚拟结构法和基于行为法6】,然而, 出现的任何故障都可能引起整个系统的失败.此外, 近几年队形控制领域出现的许多新颖方法不一定能 集中式方法不能很好地进行扩展,这是由于随着队 完全融人到这3种策略中:为此,本文提出按照关键 形中机器人成员数目的增加,将会导致巨大的通讯 技术的划分方法,为多机器人队形控制问题提供了 开销,即使采用最先进的优化求解器也不能很好解 更广泛、更清晰的视野.同时对队形控制的重点研究 决该问题.G.L.Mariottini)应用了集中式反馈线性 问题、近年来的主要进展和部分有代表性的成果进 化控制策略和扩展卡尔曼滤波技术实现了期望的队 行介绍,为国内从事队形控制研究的科研人员提供 形.Huang[o]研究了一种长距离导航的集中式定位 一定的参考。 和控制方法,用于解决一组异构移动机器人跟随 1队形控制需要解决的关键技术 leader的运动,该算法允许跟随机器人配置最少的 队形控制研究过程中的关键技术可以划分为: 传感器且计算简单,因此适合于高风险的任务中.C. D.Cuz提出了集中式控制方案和PD控制器来 1)群体体系结构,即队形控制依赖的基础结构和协 实现速度跟踪.H.Mehrjerdi等]提出了一种基于 调框架,这对于整个队形控制来说是非常关键的: 2)机器人模型,用于描述机器人的本质和行为,机 模糊模型的集中式智能协调控制和轨迹跟踪算法, 器人模型不同,所采用的队形控制策略也是不一样 并在一组移动机器人上进行了测试,设计的模糊模 的:3)队形形状表示,编队控制中常用的队形形状 型应用了2种行为:轨迹跟踪和协调,这2种行为协 有直线形、柱形、楔形和菱形等,需要一种明确有效 调工作,使机器人可以沿先前定义的轨迹编队运行 的方法来表示具体的队形形状;4)参考类型,对于 1.1.2分布式体系结构 某一指定的具体队形形状来说,每个成员机器人在 分布式体系结构是指在机器人团队的控制结构 队形中都有其具体的期望位置,因而需要根据队形 中没有任何的集中组织,单个机器人根据局部传感 形状和其他机器人的位置计算其在队形中的正确位 器和通讯等信息进行自主决策,相对来说控制地位 置:5)队形控制策略,需要设计合理有效的运动控 平等这类系统的优点在于对单个机器人成员的故 制策略,驱动个体机器人运动到各自的期望队形位 障或丢失具有鲁棒性和可扩展性,并且不易受通讯 置处.下面针对上述队形控制关键技术对现有文献 和计算误差的影响然而,分布式体系结构无法进行 成果进行分析和总结 智能集中决策是影响其在实际环境下应用的一个主 1.1群体体系结构 要障碍.T.Keviczky等3)提出了一种分布式的方 传统的多机器人编队技术按群体的体系结构可 法,该方法中每个机器人在每个采样周期只对自身 以分为集中式和分布式2种,如图1(a)、(b)所示 及相邻机器人进行局部优化.T.Keviczky等1还应 用混合整数线性规划法来求解分布式滚动时域规划 主控 器,该方法为每个机器人分配了一个时间序列,在这 命令和 数据 、信息流 个时间内机器人计算其动态可行无碰撞轨迹.W. 机器人1 Ren和N.Sorensentis)提出了一种分布式队形控制 8 方法,该方法可以适应任意的群体leader数目,也允 机器人1 机器人N 机器人2 机器人W 许内部的机器人在队形状态估计层和车辆控制层的 (a)集中式体系结构 b)分布式体系结构 耦合,由于群体leader数目的增加,该方法对于 leader的单点故障具有鲁棒性.M.Defoort等[i6)为带 有传感器和通讯网络限制的一组移动机器人提出了 单元 种分散式滚动时域运动规划器,该方法的优点在 于每个小车只需要其相邻车辆的局部信息.Lee和 Chong!)提出了一种分散式领航参考法和邻居参考 机器人1 年年4 机器人W 方法,用于一组执行协调任务的匿名移动机器人的 (©)分层式体系结构 队形控制.A.K.Ray)采用了一种分布式无碰撞的 图1多机器人编队常用的体系结构 智能协调和导航算法,该方法中每个智能体依赖队 Fig.1 The common architectures of multi robot formation 形中主智能体的运动主动性来在线决策其行为.在
题进行总结,目的在于:1) 通过本文可以比较容易 地衡量队形控制的发展状况,并了解每个队形控制 子问题尚未解决的困难,以鼓励研究人员对这些问 题做出更大的贡献;2)目前有关队形控制的文献普 遍将队形控制方法划分为 3 种主要的策略,分别为 领航-跟随法、虚拟结构法和基于行为法[6-8] ,然而, 近几年队形控制领域出现的许多新颖方法不一定能 完全融入到这 3 种策略中;为此,本文提出按照关键 技术的划分方法,为多机器人队形控制问题提供了 更广泛、更清晰的视野.同时对队形控制的重点研究 问题、近年来的主要进展和部分有代表性的成果进 行介绍,为国内从事队形控制研究的科研人员提供 一定的参考. 1 队形控制需要解决的关键技术 队形控制研究过程中的关键技术可以划分为: 1)群体体系结构,即队形控制依赖的基础结构和协 调框架,这对于整个队形控制来说是非常关键的; 2)机器人模型,用于描述机器人的本质和行为,机 器人模型不同,所采用的队形控制策略也是不一样 的;3)队形形状表示,编队控制中常用的队形形状 有直线形、柱形、楔形和菱形等,需要一种明确有效 的方法来表示具体的队形形状;4) 参考类型,对于 某一指定的具体队形形状来说,每个成员机器人在 队形中都有其具体的期望位置,因而需要根据队形 形状和其他机器人的位置计算其在队形中的正确位 置;5)队形控制策略,需要设计合理有效的运动控 制策略,驱动个体机器人运动到各自的期望队形位 置处.下面针对上述队形控制关键技术对现有文献 成果进行分析和总结. 1.1 群体体系结构 传统的多机器人编队技术按群体的体系结构可 以分为集中式和分布式 2 种,如图 1(a)、(b)所示. 图 1 多机器人编队常用的体系结构 Fig.1 The common architectures of multi robot formation 1.1.1 集中式体系结构 集中式体系结构中,由某一关键的核心单元做 出决策并与团队中的其他机器人进行通讯,该核心 单元可以优化机器人的协调,容纳单个机器人的故 障并监视任务的完成情况.然而,缺点在于核心单元 出现的任何故障都可能引起整个系统的失败.此外, 集中式方法不能很好地进行扩展,这是由于随着队 形中机器人成员数目的增加,将会导致巨大的通讯 开销,即使采用最先进的优化求解器也不能很好解 决该问题.G. L. Mariottini [9] 应用了集中式反馈线性 化控制策略和扩展卡尔曼滤波技术实现了期望的队 形.Huang [10]研究了一种长距离导航的集中式定位 和控制方法,用于解决一组异构移动机器人跟随 leader 的运动,该算法允许跟随机器人配置最少的 传感器且计算简单,因此适合于高风险的任务中.C. D. Cruz [11]提出了集中式控制方案和 PD 控制器来 实现速度跟踪.H. Mehrjerdi 等[12] 提出了一种基于 模糊模型的集中式智能协调控制和轨迹跟踪算法, 并在一组移动机器人上进行了测试,设计的模糊模 型应用了 2 种行为:轨迹跟踪和协调,这 2 种行为协 调工作,使机器人可以沿先前定义的轨迹编队运行. 1.1.2 分布式体系结构 分布式体系结构是指在机器人团队的控制结构 中没有任何的集中组织,单个机器人根据局部传感 器和通讯等信息进行自主决策,相对来说控制地位 平等.这类系统的优点在于对单个机器人成员的故 障或丢失具有鲁棒性和可扩展性,并且不易受通讯 和计算误差的影响.然而,分布式体系结构无法进行 智能集中决策是影响其在实际环境下应用的一个主 要障碍. T. Keviczky 等[13] 提出了一种分布式的方 法,该方法中每个机器人在每个采样周期只对自身 及相邻机器人进行局部优化.T. Keviczky 等[14] 还应 用混合整数线性规划法来求解分布式滚动时域规划 器,该方法为每个机器人分配了一个时间序列,在这 个时间内机器人计算其动态可行无碰撞轨迹. W. Ren 和 N. Sorensen [15] 提出了一种分布式队形控制 方法,该方法可以适应任意的群体 leader 数目,也允 许内部的机器人在队形状态估计层和车辆控制层的 耦合, 由于群体 leader 数目的增加, 该方法对于 leader 的单点故障具有鲁棒性.M. Defoort 等[16] 为带 有传感器和通讯网络限制的一组移动机器人提出了 一种分散式滚动时域运动规划器,该方法的优点在 于每个小车只需要其相邻车辆的局部信息. Lee 和 Chong [17]提出了一种分散式领航参考法和邻居参考 方法,用于一组执行协调任务的匿名移动机器人的 队形控制.A. K. Ray [18]采用了一种分布式无碰撞的 智能协调和导航算法,该方法中每个智能体依赖队 形中主智能体的运动主动性来在线决策其行为.在 ·382· 智 能 系 统 学 报 第 8 卷
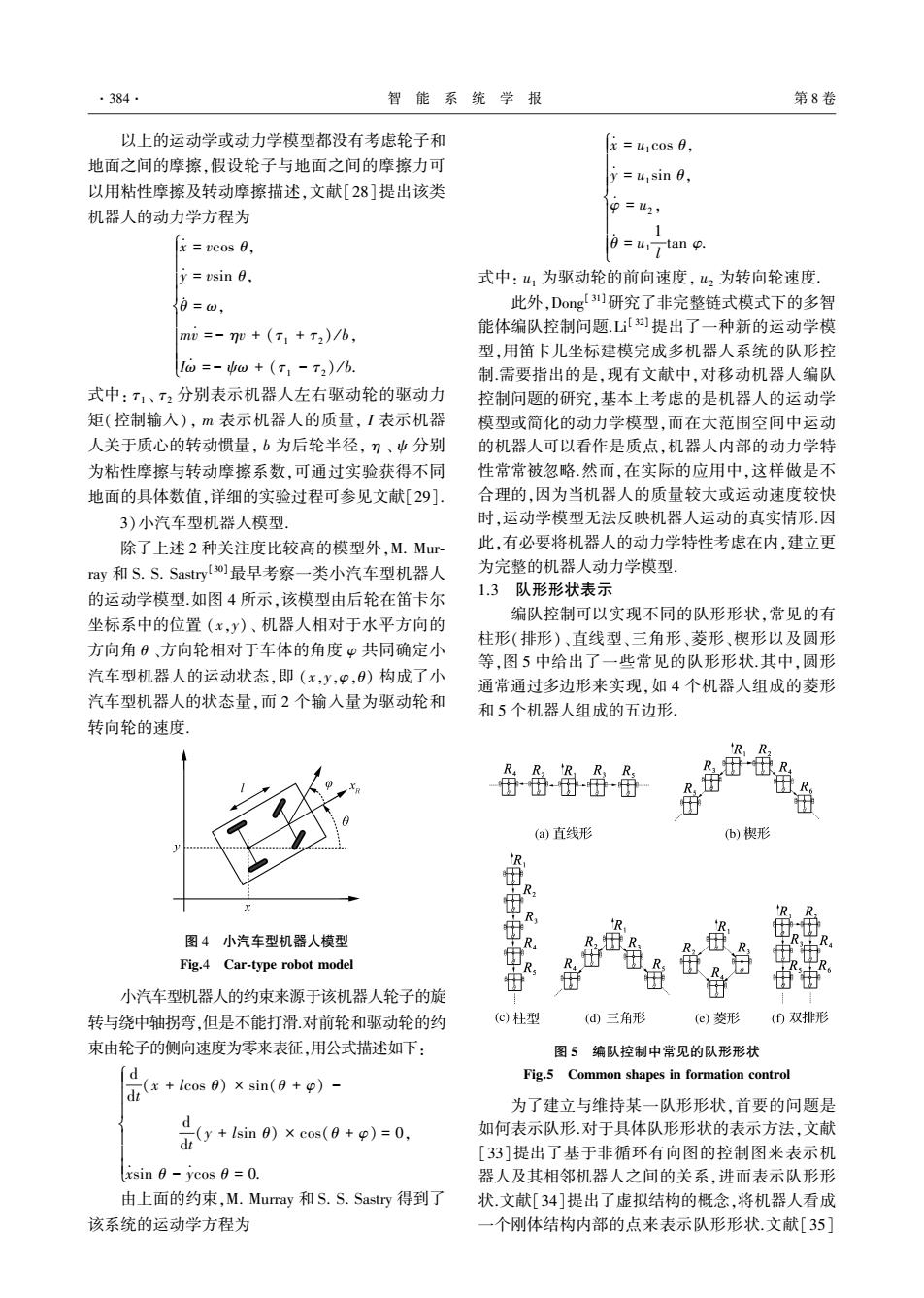
第5期 任立敏,等:移动机器人队形控制关键技术及其进展 .383. 上述方法中,任何智能体都可以估计队形中其他智 通常应用的机器人模型包括以下3种 能体的行为,因此降低了单个智能体对作决策的智 1)质点机器人模型. 能体的依赖性。 质点机器人模型可以分为质点机器人的运动学 1.1.3分层式混合体系结构 方程和质点机器人的动力学方程2种,其公式分别 此外,除了上述2种控制结构外,也有一些研究 为式(1)和(2) 者提出了分层式混合控制体系结构,如分层队形控 2=um (1) 制和树形结构编队控制在某种意义上,分层队形控 (2) 制和树形结构编队类似,图2给出了分层编队的一 2=0:,:=u 式中::表示机器人i的位置坐标,:为速度,u:为 些例子分层控制的特点是:1)各机器人以分布式方 控制输入,i=1,2,…,n 式控制:2)整个机器人团队以集中方式控制:3)可 2)非完整移动机器人模型. 以为一大类队形设计控制策略,而不是局限于某种 机器人模型除了采用线性积分器模型之外,还 具体的队形方式分层队形控制结构最大的优点在 有一类模型的关注度也很高,即如图3所示的含有 于该结构使用了集中和分布相结合的方式,如图 非完整约束的差分驱动独轮车型机器人模型.H. 1(c)所示,可以由leader或supervisor控制队形中运 动的机器人团队,也可以人工控制或半自主地控制 Yamaguchi2及Lin等[2]考察了轮式小车的运动学 机器人团队:另外一个优点是分层队形可以降低复 模型: 杂性。 元:=,c0s9:, ly;vsin 0, 0=w:, i=1,2,,n. 式中:(x:,y:)为小车i重心在X-Y平面的位置坐 Q 标,日:为前进的方向角,心:为重心平移的线速度,ω 是小车重心处角速度的大小.该系统受约束于:①机 O0-00-0-4 器人以纯滚动方式运动:②不能在外切向滑动编队 (a)链型 b)星型 (c)分支型 控制通过设计,和w,来实现.R.Ghabcheloo等[2 图2分层控制结构实例 则考察了该轮式小车的动力学模型: Fig.2 Examples of hierarchical control structure 文献[19]讨论了如何通过多机器人系统保持 =:C0s8:, 树状队形完成室内环境遇难者的救援工作:文献 y:v;sin 0, [20]提出了一种自下而上的3层队形控制结构,最 0=w:, 底层为单个机器人的运动学控制层,中间层为队形 :=F/m, 控制层,最高层为群体控制层,并应用该控制结构实 现了队形控制和分布式导航:Shao在文献[21]中基 @N:/I:, 于领航-跟随方法提出了一种自上而下的3层混合 i=1,2,.,n. 编队控制结构,分别为协调层、leader-follower控制 式中:m是小车的质量,I,为转动惯量,输入量F,和 层和实体控制层,实现了多移动机器人的协调编队 N,分别为控制的力和力矩, 控制和避障任务.文献[22]提出一种4层混合结构 的多机器人系统来完成保持队形的任务,这4层结 构分别是:任务规划层、队形层、局部控制层和实体 层.H.C.H.Hsu在文献[23]中也将机器人的队形 控制抽象为队形形状、参考类型和机器人控制3层 来进行研究」 1.2机器人模型 在多机器人编队控制系统中,队形中每个机器 人成员作为一个物理实体,它能作用于自身和环境, 并能对环境作出反应.机器人模型的不同使得编队 图3独轮车型机器人模型 控制算法的设计和编队控制系统的分析方法不同, Fig.3 Unicycle-type robot model
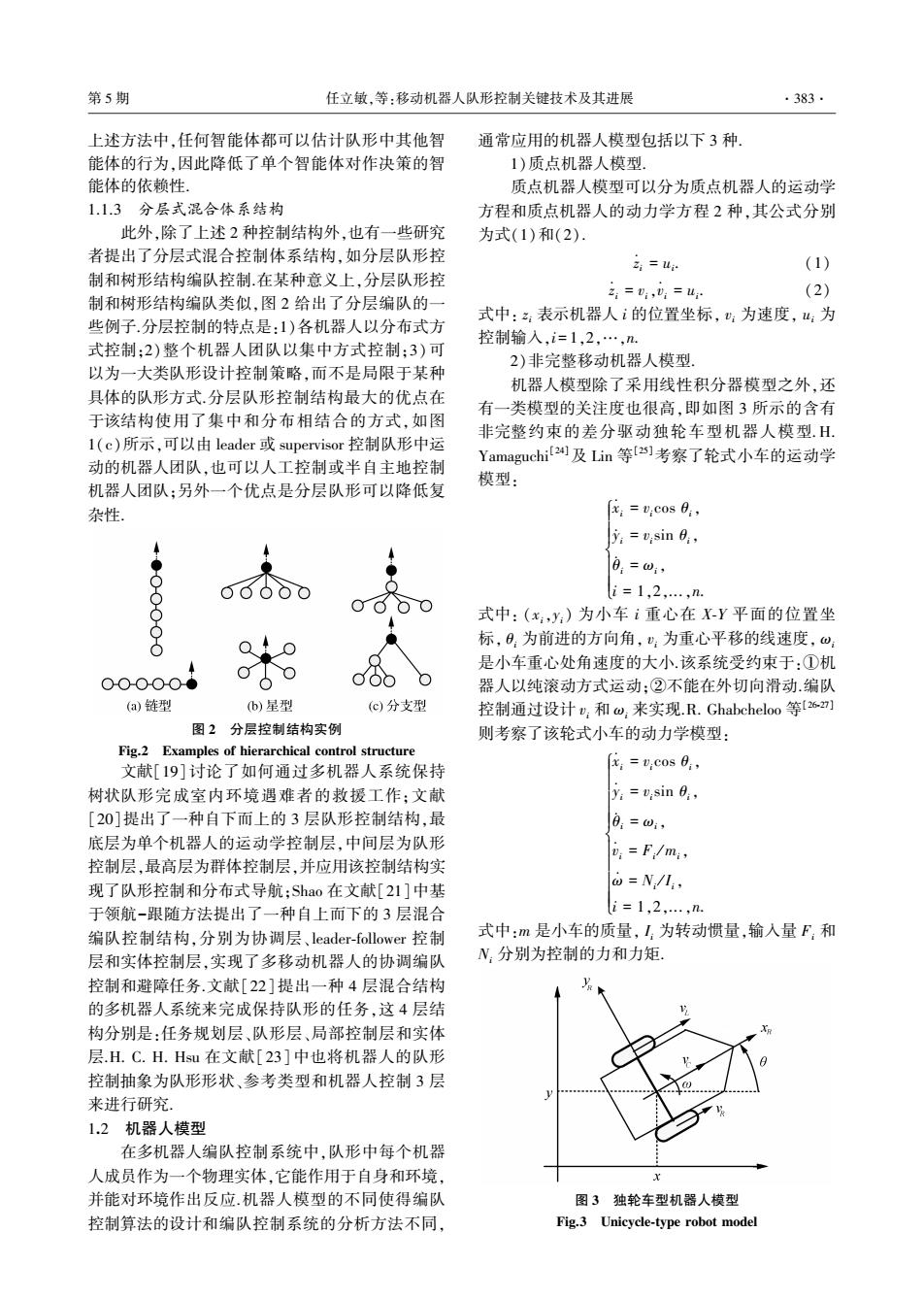
上述方法中,任何智能体都可以估计队形中其他智 能体的行为,因此降低了单个智能体对作决策的智 能体的依赖性. 1.1.3 分层式混合体系结构 此外,除了上述 2 种控制结构外,也有一些研究 者提出了分层式混合控制体系结构,如分层队形控 制和树形结构编队控制.在某种意义上,分层队形控 制和树形结构编队类似,图 2 给出了分层编队的一 些例子.分层控制的特点是:1)各机器人以分布式方 式控制;2)整个机器人团队以集中方式控制;3) 可 以为一大类队形设计控制策略,而不是局限于某种 具体的队形方式.分层队形控制结构最大的优点在 于该结构使用了集中和分布相结合的方式,如图 1(c)所示,可以由 leader 或 supervisor 控制队形中运 动的机器人团队,也可以人工控制或半自主地控制 机器人团队;另外一个优点是分层队形可以降低复 杂性. 图 2 分层控制结构实例 Fig.2 Examples of hierarchical control structure 文献[19]讨论了如何通过多机器人系统保持 树状队形完成室内环境遇难者的救援工作;文献 [20]提出了一种自下而上的 3 层队形控制结构,最 底层为单个机器人的运动学控制层,中间层为队形 控制层,最高层为群体控制层,并应用该控制结构实 现了队形控制和分布式导航;Shao 在文献[21]中基 于领航-跟随方法提出了一种自上而下的 3 层混合 编队控制结构,分别为协调层、leader⁃follower 控制 层和实体控制层,实现了多移动机器人的协调编队 控制和避障任务.文献[22]提出一种 4 层混合结构 的多机器人系统来完成保持队形的任务,这 4 层结 构分别是:任务规划层、队形层、局部控制层和实体 层.H. C. H. Hsu 在文献[23]中也将机器人的队形 控制抽象为队形形状、参考类型和机器人控制 3 层 来进行研究. 1.2 机器人模型 在多机器人编队控制系统中,队形中每个机器 人成员作为一个物理实体,它能作用于自身和环境, 并能对环境作出反应.机器人模型的不同使得编队 控制算法的设计和编队控制系统的分析方法不同, 通常应用的机器人模型包括以下 3 种. 1)质点机器人模型. 质点机器人模型可以分为质点机器人的运动学 方程和质点机器人的动力学方程 2 种,其公式分别 为式(1)和(2). z · i = ui . (1) z · i = vi,v · i = ui . (2) 式中: zi 表示机器人 i 的位置坐标, vi 为速度, ui 为 控制输入,i = 1,2,…,n. 2)非完整移动机器人模型. 机器人模型除了采用线性积分器模型之外,还 有一类模型的关注度也很高,即如图 3 所示的含有 非完整约束的差分驱动独轮车型机器人模型. H. Yamaguchi [24]及 Lin 等[25]考察了轮式小车的运动学 模型: x · i = vi cos θi, y · i = vi sin θi, θ · i = ωi, i = 1,2,...,n. ì î í ï ï ï ï ïï 式中: (xi,yi) 为小车 i 重心在 X⁃Y 平面的位置坐 标, θi 为前进的方向角, vi 为重心平移的线速度, ωi 是小车重心处角速度的大小.该系统受约束于:①机 器人以纯滚动方式运动;②不能在外切向滑动.编队 控制通过设计 vi 和 ωi 来实现.R. Ghabcheloo 等[26⁃27] 则考察了该轮式小车的动力学模型: x · i = vi cos θi, y · i = vi sin θi, θ · i = ωi, v · i = Fi / mi, ω · = Ni / Ii, i = 1,2,...,n. ì î í ï ï ï ï ï ï ï ï ïï 式中:m 是小车的质量, Ii 为转动惯量,输入量 Fi 和 Ni 分别为控制的力和力矩. 图 3 独轮车型机器人模型 Fig.3 Unicycle⁃type robot model 第 5 期 任立敏,等:移动机器人队形控制关键技术及其进展 ·383·
·384· 智能系统学报 第8卷 以上的运动学或动力学模型都没有考虑轮子和 =ucos 0, 地面之间的摩擦,假设轮子与地面之间的摩擦力可 y =u sin 0, 以用粘性摩擦及转动摩擦描述,文献[28]提出该类 机器人的动力学方程为 u2, 1 [cos 0, 0=utan y usin 0. 式中:41为驱动轮的前向速度,2为转向轮速度, 0=w, 此外,Dong[3)研究了非完整链式模式下的多智 mw=-7e+(T1+T2)/b, 能体编队控制问题刘)提出了一种新的运动学模 型,用笛卡儿坐标建模完成多机器人系统的队形控 lo=-ω+(T1-T2)/b. 制需要指出的是,现有文献中,对移动机器人编队 式中:T1、T2分别表示机器人左右驱动轮的驱动力 控制问题的研究,基本上考虑的是机器人的运动学 矩(控制输入),m表示机器人的质量,I表示机器 模型或简化的动力学模型,而在大范围空间中运动 人关于质心的转动惯量,b为后轮半径,刀、中分别 的机器人可以看作是质点,机器人内部的动力学特 为粘性摩擦与转动摩擦系数,可通过实验获得不同 性常常被忽略.然而,在实际的应用中,这样做是不 地面的具体数值,详细的实验过程可参见文献[29]. 合理的,因为当机器人的质量较大或运动速度较快 3)小汽车型机器人模型 时,运动学模型无法反映机器人运动的真实情形.因 除了上述2种关注度比较高的模型外,M.Mur- 此,有必要将机器人的动力学特性考虑在内,建立更 ray和S.S.Sastry[1最早考察一类小汽车型机器人 为完整的机器人动力学模型。 的运动学模型.如图4所示,该模型由后轮在笛卡尔 1.3队形形状表示 坐标系中的位置(x,y)、机器人相对于水平方向的 编队控制可以实现不同的队形形状,常见的有 柱形(排形)、直线型、三角形、菱形、楔形以及圆形 方向角0、方向轮相对于车体的角度”共同确定小 等,图5中给出了一些常见的队形形状.其中,圆形 汽车型机器人的运动状态,即(x,y,P,)构成了小 通常通过多边形来实现,如4个机器人组成的菱形 汽车型机器人的状态量,而2个输入量为驱动轮和 和5个机器人组成的五边形 转向轮的速度. RR R田团 团R, (a)直线形 b)楔形 图4小汽车型机器人模型 R R 团R, 由 Fig.4 Car-type robot model 守 小汽车型机器人的约束来源于该机器人轮子的旋 河 转与绕中轴拐弯,但是不能打滑.对前轮和驱动轮的约 (c)柱型 (d)三角形 (e)菱形 ()双排形 束由轮子的侧向速度为零来表征,用公式描述如下: 图5编队控制中常见的队形形状 d dt x+lcos9)×sin(0+p)- Fig.5 Common shapes in formation control 为了建立与维持某一队形形状,首要的问题是 y+lsin0))×cos(0+p)=0, d 如何表示队形.对于具体队形形状的表示方法,文献 [33]提出了基于非循环有向图的控制图来表示机 xsin 0-ycos 0 =0. 器人及其相邻机器人之间的关系,进而表示队形形 由上面的约束,M.Murray和S.S.Sastry得到了 状文献[34]提出了虚拟结构的概念,将机器人看成 该系统的运动学方程为 一个刚体结构内部的点来表示队形形状.文献[35]
以上的运动学或动力学模型都没有考虑轮子和 地面之间的摩擦,假设轮子与地面之间的摩擦力可 以用粘性摩擦及转动摩擦描述,文献[28]提出该类 机器人的动力学方程为 x · = vcos θ, y · = vsin θ, θ · = ω, mv · = - ηv + (τ1 + τ2 ) / b, Iω · = - ψω + (τ1 - τ2 ) / b. ì î í ï ï ï ï ï ï ï ï 式中: τ1 、 τ2 分别表示机器人左右驱动轮的驱动力 矩(控制输入), m 表示机器人的质量, I 表示机器 人关于质心的转动惯量, b 为后轮半径, η 、 ψ 分别 为粘性摩擦与转动摩擦系数,可通过实验获得不同 地面的具体数值,详细的实验过程可参见文献[29]. 3)小汽车型机器人模型. 除了上述 2 种关注度比较高的模型外,M. Mur⁃ ray 和 S. S. Sastry [30]最早考察一类小汽车型机器人 的运动学模型.如图 4 所示,该模型由后轮在笛卡尔 坐标系中的位置 (x,y)、 机器人相对于水平方向的 方向角 θ 、方向轮相对于车体的角度 φ 共同确定小 汽车型机器人的运动状态,即 (x,y,φ,θ) 构成了小 汽车型机器人的状态量,而 2 个输入量为驱动轮和 转向轮的速度. 图 4 小汽车型机器人模型 Fig.4 Car⁃type robot model 小汽车型机器人的约束来源于该机器人轮子的旋 转与绕中轴拐弯,但是不能打滑.对前轮和驱动轮的约 束由轮子的侧向速度为零来表征,用公式描述如下: d dt (x + lcos θ) × sin(θ + φ) - d dt (y + lsin θ) × cos(θ + φ) = 0, x · sin θ - y · cos θ = 0. ì î í ï ï ï ï ï ï 由上面的约束,M. Murray 和 S. S. Sastry 得到了 该系统的运动学方程为 x · = u1 cos θ, y · = u1 sin θ, φ · = u2 , θ · = u1 1 l tan φ. ì î í ï ï ï ï ï ï ïï 式中: u1 为驱动轮的前向速度, u2 为转向轮速度. 此外,Dong [ 31]研究了非完整链式模式下的多智 能体编队控制问题.Li [ 32] 提出了一种新的运动学模 型,用笛卡儿坐标建模完成多机器人系统的队形控 制.需要指出的是,现有文献中,对移动机器人编队 控制问题的研究,基本上考虑的是机器人的运动学 模型或简化的动力学模型,而在大范围空间中运动 的机器人可以看作是质点,机器人内部的动力学特 性常常被忽略.然而,在实际的应用中,这样做是不 合理的,因为当机器人的质量较大或运动速度较快 时,运动学模型无法反映机器人运动的真实情形.因 此,有必要将机器人的动力学特性考虑在内,建立更 为完整的机器人动力学模型. 1.3 队形形状表示 编队控制可以实现不同的队形形状,常见的有 柱形(排形)、直线型、三角形、菱形、楔形以及圆形 等,图 5 中给出了一些常见的队形形状.其中,圆形 通常通过多边形来实现,如 4 个机器人组成的菱形 和 5 个机器人组成的五边形. 图 5 编队控制中常见的队形形状 Fig.5 Common shapes in formation control 为了建立与维持某一队形形状,首要的问题是 如何表示队形.对于具体队形形状的表示方法,文献 [33]提出了基于非循环有向图的控制图来表示机 器人及其相邻机器人之间的关系,进而表示队形形 状.文献[34]提出了虚拟结构的概念,将机器人看成 一个刚体结构内部的点来表示队形形状.文献[35] ·384· 智 能 系 统 学 报 第 8 卷
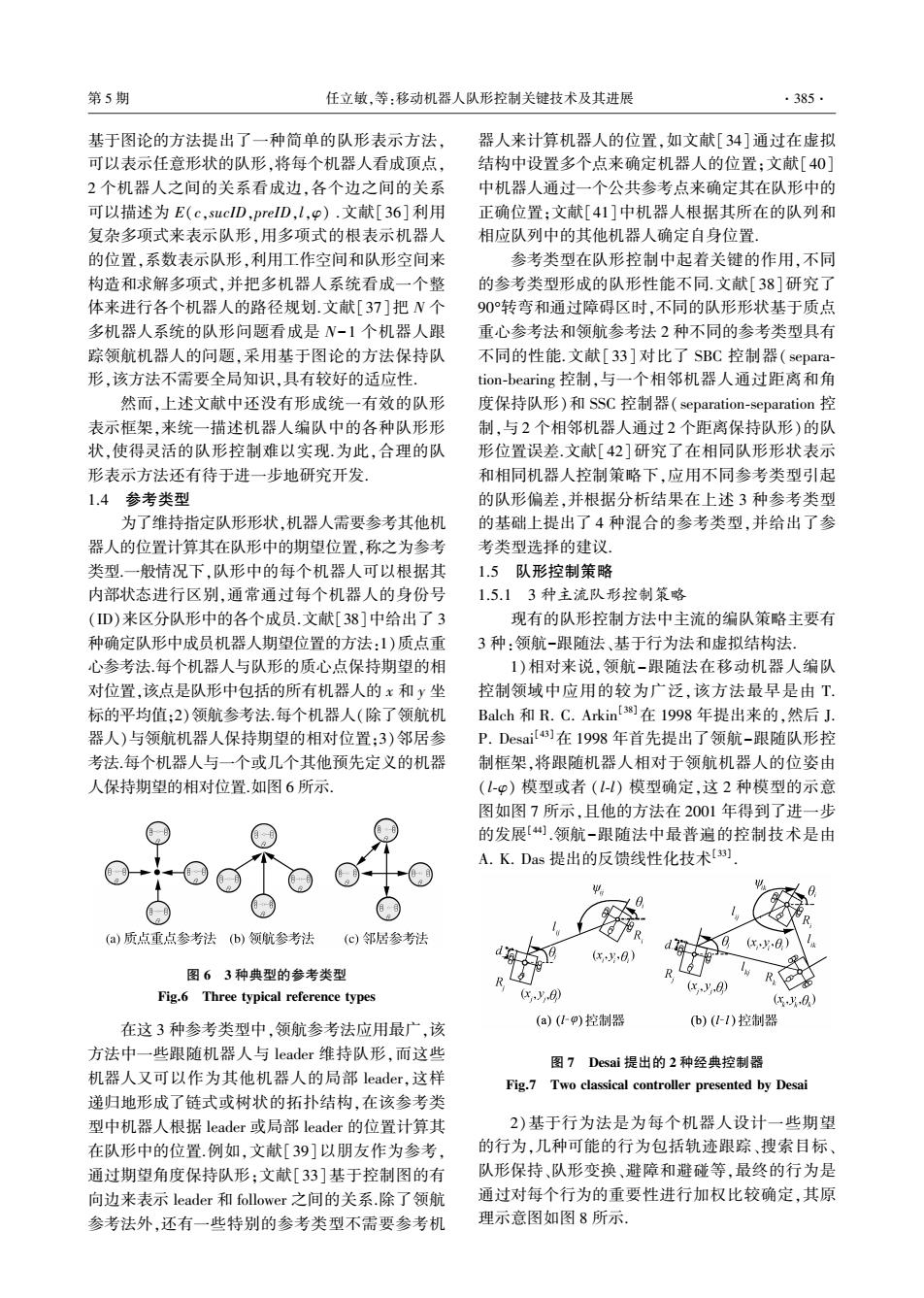
第5期 任立敏,等:移动机器人队形控制关键技术及其进展 .385· 基于图论的方法提出了一种简单的队形表示方法, 器人来计算机器人的位置,如文献[34]通过在虚拟 可以表示任意形状的队形,将每个机器人看成顶点, 结构中设置多个点来确定机器人的位置:文献[40] 2个机器人之间的关系看成边,各个边之间的关系 中机器人通过一个公共参考点来确定其在队形中的 可以描述为E(c,suelD,prelD,l,p).文献[36]利用 正确位置:文献[41]中机器人根据其所在的队列和 复杂多项式来表示队形,用多项式的根表示机器人 相应队列中的其他机器人确定自身位置 的位置,系数表示队形,利用工作空间和队形空间来 参考类型在队形控制中起着关键的作用,不同 构造和求解多项式,并把多机器人系统看成一个整 的参考类型形成的队形性能不同.文献[38]研究了 体来进行各个机器人的路径规划.文献[37]把N个 90°转弯和通过障碍区时,不同的队形形状基于质点 多机器人系统的队形问题看成是N-1个机器人跟 重心参考法和领航参考法2种不同的参考类型具有 踪领航机器人的问题,采用基于图论的方法保持队 不同的性能.文献[33]对比了SBC控制器(separa-- 形,该方法不需要全局知识,具有较好的适应性. tion-bearing控制,与一个相邻机器人通过距离和角 然而,上述文献中还没有形成统一有效的队形 度保持队形)和SSC控制器(separation-separation控 表示框架,来统一描述机器人编队中的各种队形形 制,与2个相邻机器人通过2个距离保持队形)的队 状,使得灵活的队形控制难以实现.为此,合理的队 形位置误差.文献[42]研究了在相同队形形状表示 形表示方法还有待于进一步地研究开发 和相同机器人控制策略下,应用不同参考类型引起 1.4参考类型 的队形偏差,并根据分析结果在上述3种参考类型 为了维持指定队形形状,机器人需要参考其他机 的基础上提出了4种混合的参考类型,并给出了参 器人的位置计算其在队形中的期望位置,称之为参考 考类型选择的建议。 类型.一般情况下,队形中的每个机器人可以根据其 1.5队形控制策略 内部状态进行区别,通常通过每个机器人的身份号 1.5.13种主流队形控制策略 (D)来区分队形中的各个成员.文献[38]中给出了3 现有的队形控制方法中主流的编队策略主要有 种确定队形中成员机器人期望位置的方法:1)质点重 3种:领航-跟随法、基于行为法和虚拟结构法 心参考法.每个机器人与队形的质心点保持期望的相 1)相对来说,领航-跟随法在移动机器人编队 对位置,该点是队形中包括的所有机器人的x和y坐 控制领域中应用的较为广泛,该方法最早是由T 标的平均值:2)领航参考法.每个机器人(除了领航机 Balch和R.C.Arkin[38]在1998年提出来的,然后J. 器人)与领航机器人保持期望的相对位置:3)邻居参 P.Desait4)在1998年首先提出了领航-跟随队形控 考法.每个机器人与一个或几个其他预先定义的机器 制框架,将跟随机器人相对于领航机器人的位姿由 人保持期望的相对位置.如图6所示 (1-p)模型或者(-)模型确定,这2种模型的示意 图如图7所示,且他的方法在2001年得到了进一步 的发展[4].领航-跟随法中最普遍的控制技术是由 A.K.Das提出的反馈线性化技术() )质点重点参考法(b)领航参考法 (c)邻居参考法 xy,6】 (x,0)】 图63种典型的参考类型 R (x,y00 Fig.6 Three typical reference types ,y0 (6,0) 在这3种参考类型中,领航参考法应用最广,该 (a)(p)控制器 b)(-1)控制器 方法中一些跟随机器人与leader维持队形,而这些 图7 Desai提出的2种经典控制器 机器人又可以作为其他机器人的局部leader,这样 Fig.7 Two classical controller presented by Desai 递归地形成了链式或树状的拓扑结构,在该参考类 型中机器人根据leader或局部leader的位置计算其 2)基于行为法是为每个机器人设计一些期望 在队形中的位置.例如,文献[39]以朋友作为参考, 的行为,几种可能的行为包括轨迹跟踪、搜索目标、 通过期望角度保持队形:文献[33]基于控制图的有 队形保持、队形变换、避障和避碰等,最终的行为是 向边来表示leader和follower之间的关系.除了领航 通过对每个行为的重要性进行加权比较确定,其原 参考法外,还有一些特别的参考类型不需要参考机 理示意图如图8所示
基于图论的方法提出了一种简单的队形表示方法, 可以表示任意形状的队形,将每个机器人看成顶点, 2 个机器人之间的关系看成边,各个边之间的关系 可以描述为 E(c,sucID,preID,l,φ) .文献[36]利用 复杂多项式来表示队形,用多项式的根表示机器人 的位置,系数表示队形,利用工作空间和队形空间来 构造和求解多项式,并把多机器人系统看成一个整 体来进行各个机器人的路径规划.文献[37]把 N 个 多机器人系统的队形问题看成是 N-1 个机器人跟 踪领航机器人的问题,采用基于图论的方法保持队 形,该方法不需要全局知识,具有较好的适应性. 然而,上述文献中还没有形成统一有效的队形 表示框架,来统一描述机器人编队中的各种队形形 状,使得灵活的队形控制难以实现.为此,合理的队 形表示方法还有待于进一步地研究开发. 1.4 参考类型 为了维持指定队形形状,机器人需要参考其他机 器人的位置计算其在队形中的期望位置,称之为参考 类型.一般情况下,队形中的每个机器人可以根据其 内部状态进行区别,通常通过每个机器人的身份号 (ID)来区分队形中的各个成员.文献[38]中给出了 3 种确定队形中成员机器人期望位置的方法:1)质点重 心参考法.每个机器人与队形的质心点保持期望的相 对位置,该点是队形中包括的所有机器人的 x 和 y 坐 标的平均值;2)领航参考法.每个机器人(除了领航机 器人)与领航机器人保持期望的相对位置;3)邻居参 考法.每个机器人与一个或几个其他预先定义的机器 人保持期望的相对位置.如图 6 所示. 图 6 3 种典型的参考类型 Fig.6 Three typical reference types 在这 3 种参考类型中,领航参考法应用最广,该 方法中一些跟随机器人与 leader 维持队形,而这些 机器人又可以作为其他机器人的局部 leader,这样 递归地形成了链式或树状的拓扑结构,在该参考类 型中机器人根据 leader 或局部 leader 的位置计算其 在队形中的位置.例如,文献[39]以朋友作为参考, 通过期望角度保持队形;文献[33]基于控制图的有 向边来表示 leader 和 follower 之间的关系.除了领航 参考法外,还有一些特别的参考类型不需要参考机 器人来计算机器人的位置,如文献[34]通过在虚拟 结构中设置多个点来确定机器人的位置;文献[40] 中机器人通过一个公共参考点来确定其在队形中的 正确位置;文献[41]中机器人根据其所在的队列和 相应队列中的其他机器人确定自身位置. 参考类型在队形控制中起着关键的作用,不同 的参考类型形成的队形性能不同.文献[38]研究了 90°转弯和通过障碍区时,不同的队形形状基于质点 重心参考法和领航参考法 2 种不同的参考类型具有 不同的性能.文献[33] 对比了 SBC 控制器( separa⁃ tion⁃bearing 控制,与一个相邻机器人通过距离和角 度保持队形)和 SSC 控制器(separation⁃separation 控 制,与 2 个相邻机器人通过 2 个距离保持队形)的队 形位置误差.文献[42]研究了在相同队形形状表示 和相同机器人控制策略下,应用不同参考类型引起 的队形偏差,并根据分析结果在上述 3 种参考类型 的基础上提出了 4 种混合的参考类型,并给出了参 考类型选择的建议. 1.5 队形控制策略 1.5.1 3 种主流队形控制策略 现有的队形控制方法中主流的编队策略主要有 3 种:领航-跟随法、基于行为法和虚拟结构法. 1)相对来说,领航-跟随法在移动机器人编队 控制领域中应用的较为广泛,该方法最早是由 T. Balch 和 R. C. Arkin [38]在 1998 年提出来的,然后 J. P. Desai [43]在 1998 年首先提出了领航-跟随队形控 制框架,将跟随机器人相对于领航机器人的位姿由 (l⁃φ) 模型或者 (l⁃l) 模型确定,这 2 种模型的示意 图如图 7 所示,且他的方法在 2001 年得到了进一步 的发展[44] .领航-跟随法中最普遍的控制技术是由 A. K. Das 提出的反馈线性化技术[33] . 图 7 Desai 提出的 2 种经典控制器 Fig.7 Two classical controller presented by Desai 2)基于行为法是为每个机器人设计一些期望 的行为,几种可能的行为包括轨迹跟踪、搜索目标、 队形保持、队形变换、避障和避碰等,最终的行为是 通过对每个行为的重要性进行加权比较确定,其原 理示意图如图 8 所示. 第 5 期 任立敏,等:移动机器人队形控制关键技术及其进展 ·385·