第9卷第3期 智能系统学报 Vol.9 No.3 2014年6月 CAAI Transactions on Intelligent Systems Jun.2014 D0l:10.3969/j.issn.1673-4785. 网络出版地址:http:/www.cnki.net/kcms/doi/10.3969/j-issn.1673-4785.201310010.html 一种多智能体领航跟随编队新型控制器的设计 王中林12,刘忠信2,陈增强2,孙青林2,吴垠12,马争光2 (1.南开大学计算机与控制工程学院,天津300071;2.天津市智能机器人技术重点实验室,天津300071) 摘要:研究了基于离散时间模型的多智能体领航跟随编队控制算法。在该算法中,通过引入基于邻居的局部控制 律以及基于邻居的状态估计规则设计了一种新型控制器,在该控制器中通过简单地设定跟随者和领航者之间的相 对坐标即可方便地实现任意形状编队,同时该文引入了坐标旋转公式一用于实现整个队形能够随着领航者的运 动方向的变化做相应旋转,且文中分别给出了固定拓扑和切换拓扑时系统稳定编队的充分条件。最后分别通过 Matlab仿真和在Amigobot机器人平台上做实验来验证该算法的正确性及实际可行性。 关键词:多智能体系统;一致性;编队控制:领航跟随:机器人;坐标旋转公式 中图分类号:TP18文献标志码:A文章编号:1673-4785(2014)03-0298-09 中文引用格式:王中林,刘忠信,陈增强,等.一种多智能体领航跟随编队新型控制器的设计[J].智能系统学报,2014,9(3):298 306. 英文引用格式:WANG Zhonglin,LIU Zhongxin,CHEN Zengqiang,etal.A kind of new type controller for multi-agent leader--fol- lower formation[J].CAAI Transactions on Intelligent Systems,2014,9(3):298-306. A kind of new type controller for multi-agent leader-follower formation WANG Zhonglin'2,IIU Zhongxin'2,CHEN Zengqiang'2,SUN Qinglin'2,WU Yin',MA Zhengguang' (1.College of Computer and Control Engineering,Nankai University,Tianjin 300071,China;2.Key Laboratory of Intelligent Robot- ics of Tianjin,Tianjin 300071,China) Abstract:In this paper,the algorithm of formation control concerning the Leader-Follower Multi-Agent System (MAS)based on the discrete-time model is researched.By introducing the neighbor-based local control law and the neighbor-based state estimation rules,a kind of new type controller for multi-agent leader-follower formation is de- signed.Arbitrary shape formations can be easily achieved by simply setting the follower and leader relative coordi- nates.At the same time,the coordinate rotating formula is introduced to realize the entire formation rotating accord- ingly with changes of the direction of the movement of the leader.This paper gives two sufficient conditions for the system's stable formation of fixed topology and switching topology,respectively.The correctness and the practical feasibility of this algorithm were verified through the MATLAB simulation and experiments were conducted using the Amigobot robot platform,respectively. Keywords:multi-agent system (MAS);consensus;formation control;leader-follower;robots;coordinate rotating formula 近年来,多智能体系统受到了越来越多的关注。 所谓多智能体系统是指由多个可自主计算的智能体 组成的系统,它具有自组织、学习和推理等能力以及 收稿日期:2013-10-08.网络出版日期:2014-06-14. 基金项目:国家白然科学基金资助项目(61174094):天津市自然科学 自主性、分布性和协调性等特点,在系统中每个智能 基金资助项目(13 JCYBJC17400) 体仅需与邻居进行信息交互,便能完成一个整体的 通信作者:刘忠信.lhx@nankai.cdu.cn 期望目标。多智能体技术有着广泛的应用背景,譬
第 9 卷第 3 期 智 能 系 统 学 报 Vol.9 №.3 2014 年 6 月 CAAI Transactions on Intelligent Systems Jun. 2014 DOI:10.3969 / j.issn.1673⁃4785. 网络出版地址:http: / / www.cnki.net / kcms/ doi / 10.3969 / j.issn.1673⁃4785.201310010.html 一种多智能体领航跟随编队新型控制器的设计 王中林1,2 ,刘忠信1,2 ,陈增强1,2 ,孙青林1,2 ,吴垠1,2 ,马争光1,2 (1.南开大学 计算机与控制工程学院, 天津 300071; 2.天津市智能机器人技术重点实验室, 天津 300071) 摘 要:研究了基于离散时间模型的多智能体领航跟随编队控制算法。 在该算法中,通过引入基于邻居的局部控制 律以及基于邻居的状态估计规则设计了一种新型控制器,在该控制器中通过简单地设定跟随者和领航者之间的相 对坐标即可方便地实现任意形状编队,同时该文引入了坐标旋转公式———用于实现整个队形能够随着领航者的运 动方向的变化做相应旋转,且文中分别给出了固定拓扑和切换拓扑时系统稳定编队的充分条件。 最后分别通过 Matlab 仿真和在 Amigobot 机器人平台上做实验来验证该算法的正确性及实际可行性。 关键词:多智能体系统;一致性;编队控制;领航跟随;机器人;坐标旋转公式 中图分类号: TP18 文献标志码:A 文章编号:1673⁃4785(2014)03⁃0298⁃09 中文引用格式:王中林,刘忠信,陈增强,等.一种多智能体领航跟随编队新型控制器的设计[ J]. 智能系统学报, 2014, 9(3): 298⁃ 306. 英文引用格式:WANG Zhonglin, LIU Zhongxin, CHEN Zengqiang, et al. A kind of new type controller for multi⁃agent leader⁃fol⁃ lower formation[J]. CAAI Transactions on Intelligent Systems, 2014, 9(3): 298⁃306. A kind of new type controller for multi⁃agent leader⁃follower formation WANG Zhonglin 1,2 , LIU Zhongxin 1,2 , CHEN Zengqiang 1,2 , SUN Qinglin 1,2 , WU Yin 1,2 , MA Zhengguang 1,2 (1. College of Computer and Control Engineering, Nankai University, Tianjin 300071, China; 2. Key Laboratory of Intelligent Robot⁃ ics of Tianjin, Tianjin 300071, China) Abstract:In this paper, the algorithm of formation control concerning the Leader⁃Follower Multi⁃Agent System (MAS) based on the discrete⁃time model is researched. By introducing the neighbor⁃based local control law and the neighbor⁃based state estimation rules, a kind of new type controller for multi⁃agent leader⁃follower formation is de⁃ signed. Arbitrary shape formations can be easily achieved by simply setting the follower and leader relative coordi⁃ nates. At the same time, the coordinate rotating formula is introduced to realize the entire formation rotating accord⁃ ingly with changes of the direction of the movement of the leader. This paper gives two sufficient conditions for the system's stable formation of fixed topology and switching topology, respectively. The correctness and the practical feasibility of this algorithm were verified through the MATLAB simulation and experiments were conducted using the Amigobot robot platform, respectively. Keywords:multi⁃agent system (MAS); consensus; formation control; leader⁃follower; robots; coordinate rotating formula 收稿日期:2013⁃10⁃08. 网络出版日期:2014⁃06⁃14. 基金项目:国家自然科学基金资助项目(61174094); 近年来,多智能体系统受到了越来越多的关注。 所谓多智能体系统是指由多个可自主计算的智能 通信作者:刘忠信.lzhx@ nankai.edu.cn 体 组成的系统,它具有自组织、学习和推理等能力以及 自主性、分布性和协调性等特点,在系统中每个智能 体仅需与邻居进行信息交互,便能完成一个整体的 期望目标。 多智能体技术有着广泛的应用背景,譬 天津市自然科学 基金资助项目(13JCYBJC17400)

第3期 王中林,等:一种多智能体领航跟随编队新型控制器的设计 ·299· 如可用于编队控制、交通流控制、分布式信息融合以 来验证该算法的正确性及实际可行性。 及生物、经济、工程等领域1 1相关的图论基础 随着无线通信技术以及计算机技术的快速发 展,使多个智能体组成的群体系统通过协调、合作来 为了讨论方便,简单介绍一些文中能够用到的 完成原本由单个智能体无法或难以完成的工作已经 图论中的一些基本的概念和相关的标记符号。更多 成为可能。多智能体系统具有单个智能体难以拥有 图论细节可参阅文献[15]。 的丰富的感知能力、高效率的并行执行能力、优秀稳 图论在连通系统中是非常重要且有效的数学分 定的鲁棒性和卓越的容错能力等优势,因此使得智 析工具。一个无向图G=(V,E)是由非空有限顶点 能体在实际工作环境中的可适应性及实用性均得到 集合和无序的元素偶对ek的集合组成,其中e4= 了大幅提高。而多智能体编队问题是对于多智能体 (:,)∈E称为图的边。文中假设不存在从一个 协调合作问题所开展的研究中的一个典型应用。多 顶点到它自身的边(:,:),而且由于图G是无向 智能体编队控制主要是指多个智能体在群体运动过 图,所以有H(,)∈E,(,)∈E。如果(, 程中,能够在克服环境限制的同时还保持着期望队 )∈E,那么可以说巴是:的邻居顶点,则顶点, 形,最终都能够顺利到达指定目的地的控制技术。 的邻居顶点集合定义为N:={j:(:,y)∈E,j≠ 多智能体的编队控制是目前对多智能体协调合作问 }。图中顶点:到顶点的一条路径是指从起始 题进行研究的重要基础,引起了国内外广大学者的 顶点:到终止顶点:过程中一系列顶点对组成的连 关注,是国内外进行多智能体系统研究的热点课题。 续的边。如果无向图中任何2个顶点至少有一条路 目前,常用的多智能体编队控制方法主要有分布式 径,那么就说这个图是连通的,否则就是非连通的。 控制、基于行为法、虚结构法、人工势场法和领航跟 在无向图中,用A=(a,)。xn来表示系统的权重 随法等)。 邻接矩阵,其中ag满足aa=0且a防=a:≥0。在无 在以上几种编队方法中,领航一跟随法得到了 向图G中,节点:的度定义为d:=Σa,其中j∈ 广泛应用,并且成为最普遍采用的编队方法之 N。则图G的度矩阵为对角阵D=diag(d,d2,…, 一[6。领航跟随法的基本思想是在多个智能体组 d.)。那么图G的拉普拉斯(Laplacian)矩阵L= 成的群体中,某个智能体被指定为领航者,其余作为 D-A,显然L是对称矩阵。从L的定义中,可以知 它的跟随者,跟随者以一定的距离间隔跟踪领航智 道L的每一行元素之和为零,即L·1。=0,这里 能体的位置和方向1。对于领航一跟随法有2种 1。=(1,1,…,1).x1,从而可以很容易得到L的其中 控制器形式[5,):控制器和l-p控制器。【-p控制器 一个特征值为零,其对应的特征向量为1。。 的控制目标是使跟随者和领航者之间的距离和相对 转角达到设定值9町。-l控制器考虑的是3个机器人 2控制算法设计 之间的相对位置问题,当跟随者和2个领航者之间 在介绍算法设计之前,这里先对系统的连接拓 的距离达到设定值时,就可以认为整个队形稳定了。 扑图G做一个简要的说明。文中图G的邻接矩阵 文中通过引入基于邻居的局部控制律以及基于 包括两部分,一部分是所有跟随者之间组成的连通 邻居的状态估计规则[9-3]设计了一种领航跟随编 图G的邻接矩阵用表示,相应图G的度矩阵用D表 队算法的新型控制器,在控制器中通过简单地设定 示,而领航者和每个跟随者之间的连接矩阵用B表 跟随者和领航者之间的相对坐标即可轻松实现任意 示。假设系统中包括领航者共有n+1个智能体,那 形状编队,并为了将所有跟随者相对于领航者的相 么A为n×n的对称矩阵:B为n×n的对角矩阵, 对坐标统一映射到领航者的坐标系中,在控制器中 对角线上的元素为跟随者和领航者之间的连接权重 引入了“坐标旋转公式”),用于实现整个队形的 值,文中假定图G总是连通的,则B对角线上的元 对称轴和领航者的运动方向平行,即所编队形随着 素的值至少有一个不为零,即至少有一个跟随者和 领航者的运动方向的改变做相应旋转。文中设计的 领航者是直接连通的,但这种连通是单向的,就是说 这种新型控制器,既突破了-(控制器中机器人个数 领航者的运动不受跟随者的影响。当系统的拓扑图 的限制又避免了-φ控制器设计偏复杂的缺点。文 在一定时刻变化时,则图G被认为是这n+1个智能 中分别给出了固定拓扑和切换拓扑下的系统稳定编 队的充分条件及相应的证明。文章的最后分别通过 体组成的所有可能的拓扑图集合S={G1,G2,…, MATLAB仿真和在Amigobot机器人平台上做实验 Gw}中的一个,定义P={1,2,…,M}为拓扑图的索
如可用于编队控制、交通流控制、分布式信息融合以 及生物、经济、工程等领域[1 ⁃ 4] 。 随着无线通信技术以及计算机技术的快速发 展,使多个智能体组成的群体系统通过协调、合作来 完成原本由单个智能体无法或难以完成的工作已经 成为可能。 多智能体系统具有单个智能体难以拥有 的丰富的感知能力、高效率的并行执行能力、优秀稳 定的鲁棒性和卓越的容错能力等优势,因此使得智 能体在实际工作环境中的可适应性及实用性均得到 了大幅提高。 而多智能体编队问题是对于多智能体 协调合作问题所开展的研究中的一个典型应用。 多 智能体编队控制主要是指多个智能体在群体运动过 程中,能够在克服环境限制的同时还保持着期望队 形,最终都能够顺利到达指定目的地的控制技术。 多智能体的编队控制是目前对多智能体协调合作问 题进行研究的重要基础,引起了国内外广大学者的 关注,是国内外进行多智能体系统研究的热点课题。 目前,常用的多智能体编队控制方法主要有分布式 控制、基于行为法、虚结构法、人工势场法和领航跟 随法等[5] 。 在以上几种编队方法中,领航—跟随法得到了 广泛应 用, 并 且 成 为 最 普 遍 采 用 的 编 队 方 法 之 一[6] 。 领航跟随法的基本思想是在多个智能体组 成的群体中,某个智能体被指定为领航者,其余作为 它的跟随者,跟随者以一定的距离间隔跟踪领航智 能体的位置和方向[7] 。 对于领航—跟随法有 2 种 控制器形式[5 , 8] :控制器和 l⁃φ 控制器。 l⁃φ 控制器 的控制目标是使跟随者和领航者之间的距离和相对 转角达到设定值[9] 。 l⁃l 控制器考虑的是 3 个机器人 之间的相对位置问题,当跟随者和 2 个领航者之间 的距离达到设定值时,就可以认为整个队形稳定了。 文中通过引入基于邻居的局部控制律以及基于 邻居的状态估计规则[9 - 13 ] 设计了一种领航跟随编 队算法的新型控制器,在控制器中通过简单地设定 跟随者和领航者之间的相对坐标即可轻松实现任意 形状编队,并为了将所有跟随者相对于领航者的相 对坐标统一映射到领航者的坐标系中,在控制器中 引入了“坐标旋转公式” [14] ,用于实现整个队形的 对称轴和领航者的运动方向平行,即所编队形随着 领航者的运动方向的改变做相应旋转。 文中设计的 这种新型控制器,既突破了 l⁃l 控制器中机器人个数 的限制又避免了 l⁃φ 控制器设计偏复杂的缺点。 文 中分别给出了固定拓扑和切换拓扑下的系统稳定编 队的充分条件及相应的证明。 文章的最后分别通过 MATLAB 仿真和在 Amigobot 机器人平台上做实验 来验证该算法的正确性及实际可行性。 1 相关的图论基础 为了讨论方便,简单介绍一些文中能够用到的 图论中的一些基本的概念和相关的标记符号。 更多 图论细节可参阅文献[15]。 图论在连通系统中是非常重要且有效的数学分 析工具。 一个无向图 G = (V,E) 是由非空有限顶点 集合和无序的元素偶对 ek 的集合组成,其中 ek = (vi,vj) ∈ E 称为图的边。 文中假设不存在从一个 顶点到它自身的边 (vi,vi), 而且由于图 G 是无向 图,所以有 ∀(vi,vj) ∈ E, (vj,vi) ∈ E 。 如果 (vi, vj) ∈ E ,那么可以说 vj 是 vi 的邻居顶点,则顶点 vi 的邻居顶点集合定义为 Ni = {j:(vi,vj) ∈ E,∀j ≠ i} 。 图中顶点 vi 到顶点 vj 的一条路径是指从起始 顶点 vi 到终止顶点 vj 过程中一系列顶点对组成的连 续的边。 如果无向图中任何 2 个顶点至少有一条路 径,那么就说这个图是连通的,否则就是非连通的。 在无向图中,用 A = (aij)n×n 来表示系统的权重 邻接矩阵,其中 aij 满足 aii = 0 且 aij = aji ≥ 0。 在无 向图 G 中,节点 vi 的度定义为 di = Σaij ,其中 j ∈ N。 则图 G 的度矩阵为对角阵 D = diag(d1 ,d2 ,…, dn ) 。 那么图 G 的拉普拉斯( Laplacian) 矩阵 L = D -A ,显然 L 是对称矩阵。 从 L 的定义中,可以知 道 L 的每一行元素之和为零,即 L·1 n = 0,这里 1 n = (1,1,…,1)n×1 ,从而可以很容易得到 L 的其中 一个特征值为零,其对应的特征向量为 1 n 。 2 控制算法设计 在介绍算法设计之前,这里先对系统的连接拓 扑图 G 做一个简要的说明。 文中图 G 的邻接矩阵 包括两部分,一部分是所有跟随者之间组成的连通 图 G - 的邻接矩阵用表示,相应图 G - 的度矩阵用 D 表 示,而领航者和每个跟随者之间的连接矩阵用 B 表 示。 假设系统中包括领航者共有 n + 1 个智能体,那 么 A 为 n × n 的对称矩阵; B 为 n × n 的对角矩阵, 对角线上的元素为跟随者和领航者之间的连接权重 值,文中假定图 G 总是连通的,则 B 对角线上的元 素的值至少有一个不为零,即至少有一个跟随者和 领航者是直接连通的,但这种连通是单向的,就是说 领航者的运动不受跟随者的影响。 当系统的拓扑图 在一定时刻变化时,则图 G 被认为是这 n + 1 个智能 体组成的所有可能的拓扑图集合 S = {G1 ,G2 ,…, GM } 中的一个,定义 P ~ = {1,2,…,M} 为拓扑图的索 第 3 期 王中林,等:一种多智能体领航跟随编队新型控制器的设计 ·299·
·300· 智能系统学报 第9卷 引值集合。为了描述切换拓扑情形,在这里定义一 B,第i个跟随者和领导者相连 b.(k)= 个切换拓扑图的触发信号变量2:[0,o)→P,这里 (0,其他 2表示在0到无穷区间的任意分散的随机时刻点都 i,j=1,2,…,n,ag>0,B>0。 这里首先对坐标系问题做一个简要说明:文中 指向P中的一个值,即对应着一种拓扑图,其中2个 假定有2个坐标系,一个是绝对坐标系,另一个是领 相邻的随机触发时刻点可能间隔很小也可能很大。 航者坐标系,但无论是领航者还是跟随者,它们的实 文中在切换拓扑下,所有的矩阵都带有下标2以表 际坐标均是基于绝对坐标系的。这里的领航者坐标 示它们是在2的触发下进行变化,为了书写简便, 系定义为:以领航者的绝对坐标作为它自身坐标系 以下均省略下标2。 的坐标原点,并以它的运动方向作为它自身坐标系 2.1新型控制器设计 在文中的Leader-Follower多智能体系统中,领 的x轴正方向。所以领航者自身的坐标系其实是以 航者的运动不受跟随者的影响,并且假定领航者的 领航者的角速度大小(顺时针时其大小为负值)相 速度无法被跟随者实时获取。这里首先介绍一下领 对于绝对坐标系做顺或逆时针方向的旋转,加上领 航者的运动控制律: 航者同时以一定的线速度在运动,故领航者坐标系 相对于绝对坐标系一边做旋转运动一边沿着领航者 xo(k+1)=x(k)+vo(k) 的运动轨迹做平移运动。譬如当领航者做逆时针方 vo(k +1)=vo(k)+a(k) 向的匀速圆周运动时,领航者坐标系相对于绝对坐 a(k)=ao+8(k) 标系则是一边以恒定的角速度做逆时针方向的旋转 式中:x(k)∈Rm是领航者的位置;(k)∈R"是 运动一边以恒定的线速度沿着领航者的圆周运动轨 领航者的速度;a(k)∈Rm是加速度控制输入, 迹做平移运动。 a。∈R是初始加速度值,为已知的:6(k)∈Rm为 式(2)中的p.(k)=R(k)C:∈Rm为实现编队 环境噪声扰动是未知的,但是它有一个给定的上限 的控制参数。其中C:=[p:P]T为绝对坐标系 值δ,即I6(k)‖≤δ,‖δ(k)‖表示8(k)的2 下系统稳定时第i个跟随者相对于领航者的相对坐 范数。文中出现的形如Ⅱ·‖的表达式均表示2 标位置。为描述方便,这里以3个智能体甲为领航 范数,这里m的值可以取任意自然数,但一般取值2 者、乙丙均为跟随者编队成为等腰三角形为例进行 和3,因为取值为2和3时分别表示2维平面和三维 说明,首先假定“前方”指X轴正方向,“上方”指Y 空间,文中所有的上下标的m取值均为2。 轴正方向,那么假定甲在前方,乙和丙在甲的后方且 跟随者的运动控制律如式(1)所示: 乙在丙的上方,同时乙丙连线是等腰三角形底边,设 x,(k+1)=x:(k)+:(k)+du.(k) (1) 定甲乙丙到底边中点的距离都为M,如图1(a)所 u:(k+1)=:(k)+du:(k) 示,则如果此时甲的坐标为(x,y),乙丙的坐标分 式中:x:(k)∈R"是第i个跟随者的位置;,(k)∈ 别为(x1,y)、(x2,y2),那么有 Rm是第i个跟随者的速度;d和r均为控制常量参 P1=x1-x=-M 数,在后面将给出它们的取值范围。 Pn =y-y=M 由于领航者和其他邻居跟随者的速度无法实时 获取,又因为他们的位置信息可以实时得到,故式 P2=x2-x=-M (1)中的u,(k)∈Rm为第i个跟随者的基于邻居位 P2=y2-y=-M 置信息的控制器输入,其表达式为 故当队形一定时P:和P:为定值。为描述简 u,(k)=-[∑a,(k)(x,(k)- 便,这里不妨假设系统稳定时领航者在绝对坐标系 jeN(k) 中的坐标始终为(0,0),那么C则可看成第i个跟 P:(k))-(x(k)-P(k)))+ 随者在绝对坐标系的坐标,做这样的假设后可以随 b.(k)((x(k)-P,(k))-x(k))] 意设定跟随者坐标以实现任意形状编队。R,(k)表 (2)》 达式为 式中: Tcos(0.(k))-sin(0.(k))1 a,第i个跟随者和第j个跟随者相连 R(k)= sin(0.(k)) cos(0(k)) a,(k)= 0,其他 它为第i个跟随者第k时刻的坐标旋转矩阵
引值集合。 为了描述切换拓扑情形,在这里定义一 个切换拓扑图的触发信号变量 Ω:[0,¥) → P ~ ,这里 Ω 表示在 0 到无穷区间的任意分散的随机时刻点都 指向 P ~ 中的一个值,即对应着一种拓扑图,其中 2 个 相邻的随机触发时刻点可能间隔很小也可能很大。 文中在切换拓扑下,所有的矩阵都带有下标 Ω 以表 示它们是在 Ω 的触发下进行变化,为了书写简便, 以下均省略下标 Ω 。 2.1 新型控制器设计 在文中的 Leader⁃Follower 多智能体系统中,领 航者的运动不受跟随者的影响,并且假定领航者的 速度无法被跟随者实时获取。 这里首先介绍一下领 航者的运动控制律: x0(k + 1) = x0(k) + v0(k) v0(k + 1) = v0(k) + a(k) a(k) = a0 + δ(k) ì î í ï ï ï ï 式中: x0(k) ∈ R m 是领航者的位置; v0(k) ∈ R m 是 领航者的速度; a(k) ∈ R m 是加速度控制输入, a0 ∈R m 是初始加速度值,为已知的; δ(k) ∈ R m 为 环境噪声扰动是未知的,但是它有一个给定的上限 值 δ - ,即 ‖δ(k)‖ ≤ δ - , ‖δ(k)‖ 表示 δ(k) 的 2 范数。 文中出现的形如 ‖·‖ 的表达式均表示 2 范数,这里 m 的值可以取任意自然数,但一般取值 2 和 3,因为取值为 2 和 3 时分别表示 2 维平面和三维 空间,文中所有的上下标的 m 取值均为 2。 跟随者的运动控制律如式(1)所示: xi(k + 1) = xi(k) + vi(k) + dui(k) vi(k + 1) = v { i(k) + drui(k) (1) 式中: xi(k) ∈ R m是第 i 个跟随者的位置; vi(k) ∈ R m是第 i 个跟随者的速度; d 和 r 均为控制常量参 数,在后面将给出它们的取值范围。 由于领航者和其他邻居跟随者的速度无法实时 获取,又因为他们的位置信息可以实时得到,故式 (1)中的 ui(k) ∈ R m 为第 i 个跟随者的基于邻居位 置信息的控制器输入,其表达式为 ui(k) = - [ j∈∑Ni (k) aij(k)((xi(k) - pi(k)) - (xj(k) - pj(k))) + bi(k)((xi(k) - pi(k)) - x0(k))] (2) 式中: aij(k) = αij,第 i 个跟随者和第 j 个跟随者相连 0,其他 { bi(k) = βi,第 i 个跟随者和领导者相连 0, 其他 { i,j = 1,2,…,n , αij > 0, βi > 0。 这里首先对坐标系问题做一个简要说明:文中 假定有 2 个坐标系,一个是绝对坐标系,另一个是领 航者坐标系,但无论是领航者还是跟随者,它们的实 际坐标均是基于绝对坐标系的。 这里的领航者坐标 系定义为:以领航者的绝对坐标作为它自身坐标系 的坐标原点,并以它的运动方向作为它自身坐标系 的 x 轴正方向。 所以领航者自身的坐标系其实是以 领航者的角速度大小(顺时针时其大小为负值) 相 对于绝对坐标系做顺或逆时针方向的旋转,加上领 航者同时以一定的线速度在运动,故领航者坐标系 相对于绝对坐标系一边做旋转运动一边沿着领航者 的运动轨迹做平移运动。 譬如当领航者做逆时针方 向的匀速圆周运动时,领航者坐标系相对于绝对坐 标系则是一边以恒定的角速度做逆时针方向的旋转 运动一边以恒定的线速度沿着领航者的圆周运动轨 迹做平移运动。 式(2)中的 pi(k) = Ri(k) Ci ∈ R m 为实现编队 的控制参数。 其中 Ci = [px i pyi] T 为绝对坐标系 下系统稳定时第 i 个跟随者相对于领航者的相对坐 标位置。 为描述方便,这里以 3 个智能体甲为领航 者、乙丙均为跟随者编队成为等腰三角形为例进行 说明,首先假定“前方”指 X 轴正方向,“上方”指 Y 轴正方向,那么假定甲在前方,乙和丙在甲的后方且 乙在丙的上方,同时乙丙连线是等腰三角形底边,设 定甲乙丙到底边中点的距离都为 M ,如图 1( a)所 示,则如果此时甲的坐标为 (x,y) ,乙丙的坐标分 别为 (x1 ,y1 ) 、 (x2 ,y2 ) ,那么有 px1 = x1 - x = - M py1 = y1 { - y = M px2 = x2 - x = - M py2 = y2 { - y = - M 故当队形一定时 px i 和 pyi 为定值。 为描述简 便,这里不妨假设系统稳定时领航者在绝对坐标系 中的坐标始终为(0,0),那么 Ci 则可看成第 i 个跟 随者在绝对坐标系的坐标,做这样的假设后可以随 意设定跟随者坐标以实现任意形状编队。 Ri(k) 表 达式为 Ri(k) = cos(θi(k)) - sin(θi(k)) sin(θi(k)) cos(θi(k)) é ë ê ê ù û ú ú 它为第 i 个跟随者第 k 时刻的坐标旋转矩阵, ·300· 智 能 系 统 学 报 第 9 卷
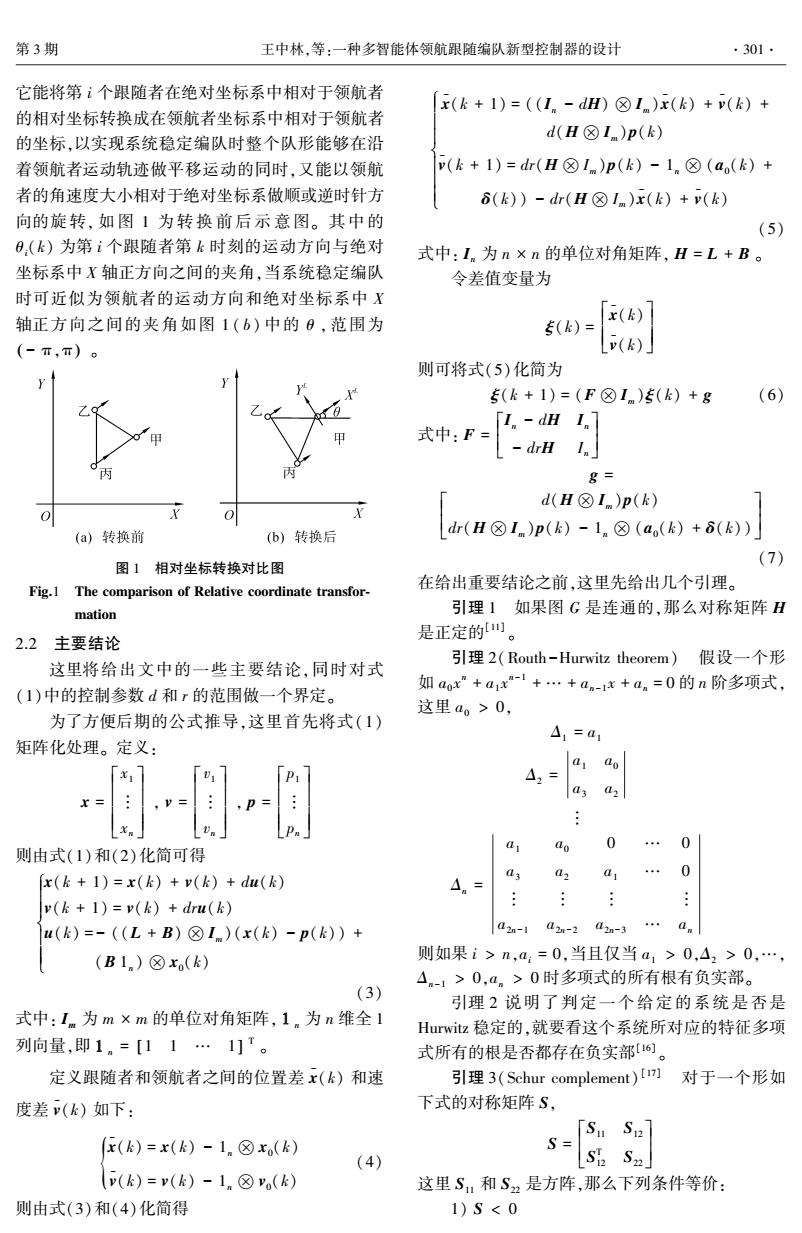
第3期 王中林,等:一种多智能体领航跟随编队新型控制器的设计 ·301- 它能将第i个跟随者在绝对坐标系中相对于领航者 x(+1)=((I-dH)I)x(k)+v(k)+ 的相对坐标转换成在领航者坐标系中相对于领航者 的坐标,以实现系统稳定编队时整个队形能够在沿 d(H☒Im)p(k) 着领航者运动轨迹做平移运动的同时,又能以领航 v(k+1)=dr(H☒Im)p(k)-1.☒(a(k)+ 者的角速度大小相对于绝对坐标系做顺或逆时针方 δ(k))-dr(H☒Im)x(k)+(k) 向的旋转,如图1为转换前后示意图。其中的 (5) 日,(k)为第i个跟随者第k时刻的运动方向与绝对 式中:I.为n×n的单位对角矩阵,H=L+B。 坐标系中X轴正方向之间的夹角,当系统稳定编队 令差值变量为 时可近似为领航者的运动方向和绝对坐标系中X ( (k 轴正方向之间的夹角如图1(b)中的8,范围为 (-T,T)。 (k)」 则可将式(5)化简为 (k+1)=(F☒Im)5(k)+g (6) 「In-dHIn 式中:F= drH 8= d(H☒Im)p(k) (a)转换前 (b)转换后 dr(H☒In)p(k)-1n☒(a(k)+6(k)) (7) 图1相对坐标转换对比图 Fig.1 The comparison of Relative coordinate transfor- 在给出重要结论之前,这里先给出几个引理。 mation 引理1如果图G是连通的,那么对称矩阵H 是正定的。 2.2主要结论 引理2(Routh-Hurwitz theorem)假设一个形 这里将给出文中的一些主要结论,同时对式 (1)中的控制参数d和r的范围做一个界定。 如aox”+a1x-1+…+a.-1x+an=0的n阶多项式, 这里a>0, 为了方便后期的公式推导,这里首先将式(1)》 矩阵化处理。定义: △1=a1 a ao △2= a3 a Xn ao 0 0 则由式(1)和(2)化简可得 ar 0 (x(k+1)=x(k)+v(k)+du(k) 03 a2 0 = v(k+1)=v(k)+dru(k) u(k)=-((L+B)I)(x(k)-p(k))+ a2n-1 a2m-2 a2m-3 ...a (B1.)⑧x(k) 则如果i>n,a:=0,当且仅当a1>0,42>0,, 4-1>0,a。>0时多项式的所有根有负实部。 (3) 引理2说明了判定一个给定的系统是否是 式中:1m为m×m的单位对角矩阵,1.为n维全1 Hurwitz稳定的,就要看这个系统所对应的特征多项 列向量,即1。=[11…1]。 式所有的根是否都存在负实部[6] 定义跟随者和领航者之间的位置差x(k)和速 引理3(Schur complement)[] 对于一个形如 度差v(k)如下: 下式的对称矩阵S, 「SS2 x(k)=x(k)-1.☒x(k) S= (4) (k)=v(k)-1.☒'(k) 这里S,和S2是方阵,那么下列条件等价: 则由式(3)和(4)化简得 1)S<0
它能将第 i 个跟随者在绝对坐标系中相对于领航者 的相对坐标转换成在领航者坐标系中相对于领航者 的坐标,以实现系统稳定编队时整个队形能够在沿 着领航者运动轨迹做平移运动的同时,又能以领航 者的角速度大小相对于绝对坐标系做顺或逆时针方 向的旋 转, 如 图 1 为 转 换 前 后 示 意 图。 其 中 的 θi(k) 为第 i 个跟随者第 k 时刻的运动方向与绝对 坐标系中 X 轴正方向之间的夹角,当系统稳定编队 时可近似为领航者的运动方向和绝对坐标系中 X 轴正方向之间的夹角如图 1 ( b) 中的 θ ,范围为 ( - π,π) 。 图 1 相对坐标转换对比图 Fig.1 The comparison of Relative coordinate transfor⁃ mation 2.2 主要结论 这里将给出文中的一些主要结论,同时对式 (1)中的控制参数 d 和 r 的范围做一个界定。 为了方便后期的公式推导,这里首先将式(1) 矩阵化处理。 定义: x = x1 ︙ xn é ë ê ê ê ê ù û ú ú ú ú , v = v1 ︙ vn é ë ê ê ê ê ù û ú ú ú ú , p = p1 ︙ pn é ë ê ê ê ê ù û ú ú ú ú 则由式(1)和(2)化简可得 x(k + 1) = x(k) + v(k) + du(k) v(k + 1) = v(k) + dru(k) u(k) = - ((L + B) Im )(x(k) - p(k)) + (B 1n ) x0(k) ì î í ï ïï ï ïï (3) 式中: Im 为 m × m 的单位对角矩阵, 1 n 为 n 维全 1 列向量,即 1 n = [1 1 … 1] T 。 定义跟随者和领航者之间的位置差 x - (k) 和速 度差 v - (k) 如下: x - (k) = x(k) - 1n x0(k) v - (k) = v(k) - 1n v0(k) { (4) 则由式(3)和(4)化简得 x - (k + 1) = ((In - dH) Im )x - (k) + v - (k) + d(H Im )p(k) v - (k + 1) = dr(H Im )p(k) - 1n (a0(k) + δ(k)) - dr(H Im )x - (k) + v - (k) ì î í ï ï ï ï ï ï (5) 式中: In 为 n × n 的单位对角矩阵, H = L + B 。 令差值变量为 ξ(k) = x - (k) v - (k) é ë ê êê ù û ú úú 则可将式(5)化简为 ξ(k + 1) = (F Im )ξ(k) + g (6) 式中: F = In - dH In - drH In é ë ê ê ù û ú ú g = d(H Im )p(k) dr(H Im )p(k) - 1n (a0(k) + δ(k)) é ë ê ê ù û ú ú (7) 在给出重要结论之前,这里先给出几个引理。 引理 1 如果图 G 是连通的,那么对称矩阵 H 是正定的[11] 。 引理 2(Routh-Hurwitz theorem) 假设一个形 如 a0 x n + a1 x n-1 + … + an-1 x + an = 0 的 n 阶多项式, 这里 a0 > 0, Δ1 = a1 Δ2 = a1 a0 a3 a2 ︙ Δn = a1 a0 0 … 0 a3 a2 a1 … 0 ︙ ︙ ︙ ︙ a2n-1 a2n-2 a2n-3 … an 则如果 i > n,ai = 0,当且仅当 a1 > 0,Δ2 > 0,…, Δn-1 > 0,an > 0 时多项式的所有根有负实部。 引理 2 说明了判定一个给定的系统是否是 Hurwitz 稳定的,就要看这个系统所对应的特征多项 式所有的根是否都存在负实部[16] 。 引理 3(Schur complement) [17] 对于一个形如 下式的对称矩阵 S, S = S11 S12 S T 12 S22 é ë ê ê ù û ú ú 这里 S11 和 S22 是方阵,那么下列条件等价: 1) S < 0 第 3 期 王中林,等:一种多智能体领航跟随编队新型控制器的设计 ·301·

·302· 智能系统学报 第9卷 2)S1<0,S2-ShSS2<0 根都有负实部时,矩阵F才是Schr稳定的。 3)S2<0,S11-S12S2S12<0 由于入(H)>0,结合式(9),通过引理2可知, 接下来介绍一下文中的2个重要的定理结论。 欲使F是Schur稳定的,可得当且仅当正的常量r和 定理1是关于固定拓扑情况下系统能够达到稳定编 d满足(1-r)d>0、(r-2)d入.(H)+4>0,即0< 队的充分条件,而定理2是关于切换拓扑情况下系 r<1,0<d<4/((2-r)入m)时才能达到要求,这 统能够达到稳定编队的充分条件。 里的入m表示H的特征值入:(H)中的最大值,i= 定理1已知连接拓扑图G是固定的,并且在 1,2,…,n。 任意时刻k都是连通的,此时L和B都是恒定矩阵。 所以当0<r<10<d<4/((2-r)入m)时, 则使得系统(3)稳定编队的充分条件是:对任何给 F是Schur稳定的,相应的F☒In也是Schur稳定的。 定的0<r<1,d取值满足0<d<4/((2- 又由于在队形固定的情况下,P和P:是固定 r)入m),并且存在一个常量C,使得 的,则二者可以看成是常量,所以易知式(7)中的参数 liml(k)‖≤C 除δ(k)外均为常量,由于‖δ(k)‖≤δ,所以在给 式中:入m表示H的最大特征值。常数C由3组常 定常量r、d、ao(k)、δ、Pa和P:情况下‖g‖≤ 量6,PtPi共同决定,i=1,2,…,n,特别地,当 C。,这里的C。是基于上述这些常量值的大小而定的 8=0,Pm=0,Pi=0时,有 有界值。所以Ⅱg‖是有界的,因此在给定条件下存 在一个常量C使得: liml(k)‖=0 limll(k)‖≤C 式中:δ表征领航者受到环境扰动的。 定理1证毕。 证明由已知条件可知,由于图G是固定拓扑 从定理1的证明过程可以看出,系统稳定编队的 且在任意时刻k是连通的,则根据引理1可知,对称 充分条件中的τ的取值范围在连接拓扑图不变的情 矩阵H是正定的。 况下是固定的,且此时d的取值范围随r取值的增大 令U为矩阵H的Schur转换矩阵(酉矩阵),则 而增大。接下来的定理2是切换连接拓扑图情况下, 「A,(H) 0 0 0 系统达到稳定编队时的充分条件,即此时r和d需满 0 入2(H) 0 0 UHU=T:= 足的取值范围。 定理2已知切换连接拓扑图G在任意时刻k 0 0 0 入.(H) 都是连通的,此时L和B均随2的变化做相应的改 变即它们都是可变矩阵,但在2次相邻拓扑切换时刻 这里入,(H)表示矩阵H的第i个特征值,由于 点之间是恒定的。则使得系统(3)稳定编队的充分条 矩阵H是正定的,所以入.(H)>0。 件是:对任何给定的0<r<2入ma/八入m+入mx),d 取值满足: 得 (2-r)入in <d< (10) 入 并且存在一个常量C,使得: liml(k)‖≤C 计算|s12n-F=0化简并整理可得式(8): 式中:入m为H的最小特征值,入m表示H的最大特 Π[s2+(dA,(H)-2)s+(r-1)dA,(H)+1]=0 征值。常数C由3组常量δP:P:共同决定,i=1, (8) 2,…,n。特别地,当8=0,Pm=0P=0时,有 对式(8)应用双线性变换s=(t+1)/(t-1),整理 liml(k)‖=0 0 可以得到式(9): 式中:δ表征领航者受到环境扰动。 证明构造一个李雅普诺夫函数 i[dA,()2+21-r)dA,(Hz+ (9) V(E)=ETPe (r-2)dλ(H)+4]=0 其中对称矩阵P为 上面的双线性变换是把S平面上单位圆内部区 2r21n n=q☒1m 域映射到复平面t的左半区域。只有当式(9)的所有 -r1
2) S11 < 0, S22 - S T 12 S -1 11 S12 < 0 3) S22 < 0, S11 - S12 S -1 22 S T 12 < 0 接下来介绍一下文中的 2 个重要的定理结论。 定理 1 是关于固定拓扑情况下系统能够达到稳定编 队的充分条件,而定理 2 是关于切换拓扑情况下系 统能够达到稳定编队的充分条件。 定理 1 已知连接拓扑图 G 是固定的,并且在 任意时刻 k 都是连通的,此时 L 和 B 都是恒定矩阵。 则使得系统(3)稳定编队的充分条件是:对任何给 定的 0 < r < 1, d 取值满足 0 < d < 4 / ((2 - r)λ max) ,并且存在一个常量 C ,使得 lim k→¥ ‖ξ(k)‖ ≤ C 式中: λ max 表示 H 的最大特征值。 常数 C 由 3 组常 量 δ - ,pxi,pyi 共同决定, i = 1,2,…,n ,特别地,当 δ - =0,pxi = 0,pyi = 0 时,有 lim k→¥ ‖ξ(k)‖ = 0 式中: δ - 表征领航者受到环境扰动的。 证明 由已知条件可知,由于图 G 是固定拓扑 且在任意时刻 k 是连通的,则根据引理 1 可知,对称 矩阵 H 是正定的。 令 U 为矩阵 H 的 Schur 转换矩阵(酉矩阵),则 U THU = T: = λ1(H) 0 0 0 0 λ2(H) 0 0 ︙ ︙ ︙ 0 0 0 λn(H) é ë ê ê ê ê ê ù û ú ú ú ú ú 这里 λi(H) 表示矩阵 H 的第 i 个特征值,由于 矩阵 H 是正定的,所以 λi(H) > 0。 令: U - = U 0 0 U é ë ê ê ù û ú ú ,由于 F = In - dH In - drH In é ë ê ê ù û ú ú ,得 F ~ : = U - TFU - = In - dT In - drT In é ë ê ê ù û ú ú 计算 s I2n - F ~ = 0 化简并整理可得式(8): ∏ n i = 1 [s 2 + (dλi(H) - 2)s + (r - 1)dλi(H) + 1] = 0 (8) 对式(8)应用双线性变换 s = (t + 1) / (t - 1) ,整理 可以得到式(9): ∏ n i = 1 [rdλi(H)t 2 + 2(1 - r)dλi(H)t + (r - 2)dλi(H) + 4] = 0 (9) 上面的双线性变换是把 S 平面上单位圆内部区 域映射到复平面 t 的左半区域。 只有当式(9)的所有 根都有负实部时,矩阵 F 才是 Schur 稳定的。 由于 λi(H) > 0,结合式(9),通过引理 2 可知, 欲使 F 是 Schur 稳定的,可得当且仅当正的常量 r 和 d 满足 (1 - r)d > 0、(r - 2)dλi(H) + 4 > 0,即 0 < r < 1,0 < d < 4/ ((2 - r)λ max) 时才能达到要求,这 里的 λ max 表示 H 的特征值 λi(H) 中的最大值, i = 1,2,…,n 。 所以当 0 < r < 1、0 < d < 4/ ((2 - r)λ max) 时, F 是 Schur 稳定的,相应的 F Im 也是 Schur 稳定的。 又由于在队形固定的情况下, pxi 和 pyi 是固定 的,则二者可以看成是常量,所以易知式(7)中的参数 除 δ(k) 外均为常量,由于 ‖δ(k)‖ ≤ δ - ,所以在给 定常量 r 、 d 、 a0(k) 、 δ - 、 pxi 和 pyi 情况下 ‖g‖ ≤ C0 , 这里的 C0 是基于上述这些常量值的大小而定的 有界值。 所以 ‖g‖ 是有界的,因此在给定条件下存 在一个常量 C 使得: lim k→¥ ‖ξ(k)‖ ≤ C 定理 1 证毕。 从定理 1 的证明过程可以看出,系统稳定编队的 充分条件中的 r 的取值范围在连接拓扑图不变的情 况下是固定的,且此时 d 的取值范围随 r 取值的增大 而增大。 接下来的定理 2 是切换连接拓扑图情况下, 系统达到稳定编队时的充分条件,即此时 r 和 d 需满 足的取值范围。 定理 2 已知切换连接拓扑图 G 在任意时刻 k 都是连通的,此时 L 和 B 均随 Ω 的变化做相应的改 变即它们都是可变矩阵,但在 2 次相邻拓扑切换时刻 点之间是恒定的。 则使得系统(3)稳定编队的充分条 件是:对任何给定的 0 < r < 2λ min / (λ min + λ max) , d 取值满足: 2r (2 - r)λmin < d < 2 λmax (10) 并且存在一个常量 C ,使得: lim k→¥ ‖ξ(k)‖ ≤ C 式中: λ min 为 H 的最小特征值, λ max 表示 H 的最大特 征值。 常数 C 由 3 组常量 δ - 、pxi、pyi 共同决定, i = 1, 2,…,n 。 特别地,当 δ - = 0,pxi = 0,pyi = 0 时,有 lim k→¥ ‖ξ(k)‖ = 0 式中: δ - 表征领航者受到环境扰动。 证明 构造一个李雅普诺夫函数 V(ε) = ε TPε 其中对称矩阵 P 为 P = 2r 2 In - r In - r In In é ë ê ê ù û ú ú Im = q Im ·302· 智 能 系 统 学 报 第 9 卷