第9卷第4期 智能系统学报 Vol.9 No.4 2014年8月 CAAI Transactions on Intelligent Systems Agu.2014 D0I:10.3969/j.issn.1673-4785.201305079 网络出版t地址:http://www.cnki.net/kcms/doi/10.3969/j.issn.1673-4785.201305079.html 佳点集的OMC粒子滤波算法及其应用 刘峰1,宣士斌2,刘香品 (1.广西民族大学信息科学与工程学院,广西南宁530006;2.广西混杂计算与集成电路设计分析重点实验室,广西 南宁530006) 摘要:针对粒子滤波中粒子匮乏及样本聚集问题,提出一种基于佳点集的拟蒙特卡洛粒子滤波算法(GPS-QM CPF)。该算法利用数论中的佳点集理论和方法来构造出一种新的拟蒙特卡洛序列。由于佳点集序列与随机点列和 标准的拟蒙特卡洛序列相比分布更均匀、偏差更小,使得在滤波过程中状态估计的精度和收敛速度都得到提高,同 时还能增加粒子有效样本数和降低重采样次数。实验结果表明,提出的算法在非线性系统状态估计精度要优于粒 子滤波和标准的拟蒙特卡洛粒子滤波算法,并且在视频目标跟踪的应用中,针对跟踪目标受到遮挡的情况,算法具 有更高的跟踪精度,同时跟踪的实时性也得到了一定程度的提高。 关键词:目标跟踪:粒子滤波:拟蒙特卡洛:佳点集:遮挡 中图分类号:TP391.9文献标志码:A文章编号:1673-4785(2014)04-461-07 中文引用格式:刘峰,宣士斌,刘香品.佳点集的QMC粒子滤波算法及其应用[J].智能系统学报,2014,9(4):461467. 英文引用格式:LIU Feng,XUAN Shibin..Quasi-.Monte Carlo particle filter algorithm based on the good point set and its application J].CAAI Transactions on Intelligent Systems,2014,9(4):461-467. Quasi-Monte Carlo particle filter algorithm based on the good point set and its application LIU Feng',XUAN Shibin2,LIU Xiangpin' (1.College of Information Science and Engineering,Guangxi University for Nationalities,Nanning 530006,China;2.Guangxi Key La- boratory of Hybrid Computation and IC Design Analysis,Nanning 530006,China) Abstract:A quasi-Monte Carlo particle filtering algorithm based on the good point set(GPS-QMCPF)is proposed for solving the problem of particle shortage and sample aggregation.In the proposed algorithm,a new quasi-Monte Carlo sequence is constructed by using the good point set theory in the number theory.Considering that the good point set has a more homogeneous distribution and lower discrepancy than the standard QMC sequence and the random se- quence,GPS-QMCPF can obtain a faster convergence speed in the filtering process and a better accuracy of the state estimation.Furthermore the re-sampling frequency is reduced,which results in a lower computational cost.Experi- mental results show that the proposed algorithm gets a more accurate estimation than the standard QMC filter and par- ticle filter in the system state estimation,as well as with the video target tracking application.The proposed algorithm possesses the advantages of good tracking accuracy and a real-time standard,even in the case of occlusions. Keywords:target tracking;particle filter algorithm;quasi-Monte Carlo;good point set;occlusion 视频目标跟踪是近年来计算机视觉领域中的研 因能有效地解决视频目标跟踪中普遍存在的非线 究热点,在人机交互、视频监控、智能交通等方面都 性、非高斯性的问题),在视频跟踪领域得到了足 有着广泛的应用。粒子滤波算法(particle filter,PF) 够的重视24。而在实际应用中,粒子滤波却存在 权值退化现象,虽然通过采用重采样技术可以复制 收稿日期:2013-06-05.网络出版日期:2014-06-21. 基金项目:广西省自然科学基金资助项目(2012 GXNSFAA053227). 大权值样本),但又不可避免地会导致粒子匮乏问 通信作者:宜土斌.E-mail:sbinxuan@gxun.cm
第 怨 卷第 源 期摇摇摇摇摇 摇摇摇 摇摇摇 摇摇摇 智 能 系 统 学 报摇摇摇摇摇 摇 摇 摇 摇 摇 摇 摇 摇 摇 灾燥造援怨 翼援源 圆园员源 年 愿 月摇摇摇摇摇摇摇摇摇摇摇摇 悦粤粤陨 栽则葬灶泽葬糟贼蚤燥灶泽 燥灶 陨灶贼藻造造蚤早藻灶贼 杂赠泽贼藻皂泽 摇 摇 摇 摇 摇 摇 摇 摇 摇 摇 摇 摇 粤早怎援 圆园员源 阅韵陨院员园援猿怨远怨 辕 躁援蚤泽泽灶援员远苑猿鄄源苑愿缘援圆园员猿园缘园苑怨 网络出版地址院澡贼贼责院 辕 辕 憎憎憎援糟灶噪蚤援灶藻贼 辕 噪糟皂泽 辕 凿燥蚤 辕 员园援猿怨远怨 辕 躁援蚤泽泽灶援员远苑猿鄄源苑愿缘援圆园员猿园缘园苑怨援澡贼皂造 佳点集的 匝酝悦 粒子滤波算法及其应用 刘峰员 袁宣士斌圆 袁刘香品员 渊员援广西民族大学 信息科学与工程学院袁广西 南宁 缘猿园园园远曰 圆援 广西混杂计算与集成电路设计分析重点实验室袁广西 南宁 缘猿园园园远冤 摘 要院针对粒子滤波中粒子匮乏及样本聚集问题袁提出一种基于佳点集的拟蒙特卡洛粒子滤波算法渊 郧孕杂鄄匝酝鄄 悦孕云冤 遥 该算法利用数论中的佳点集理论和方法来构造出一种新的拟蒙特卡洛序列遥 由于佳点集序列与随机点列和 标准的拟蒙特卡洛序列相比分布更均匀尧偏差更小袁使得在滤波过程中状态估计的精度和收敛速度都得到提高袁同 时还能增加粒子有效样本数和降低重采样次数遥 实验结果表明袁提出的算法在非线性系统状态估计精度要优于粒 子滤波和标准的拟蒙特卡洛粒子滤波算法袁并且在视频目标跟踪的应用中袁针对跟踪目标受到遮挡的情况袁算法具 有更高的跟踪精度袁同时跟踪的实时性也得到了一定程度的提高遥 关键词院目标跟踪曰粒子滤波曰拟蒙特卡洛曰佳点集曰遮挡 中图分类号院 栽孕猿怨员援怨 摇 文献标志码院粤摇 文章编号院员远苑猿鄄源苑愿缘渊圆园员源冤园源鄄源远员鄄园苑 中文引用格式院刘峰袁宣士斌袁刘香品援 佳点集的 匝酝悦 粒子滤波算法及其应用咱允暂援 智能系统学报袁 圆园员源袁 怨渊源冤 院 源远员鄄源远苑援 英文引用格式院蕴陨哉 云藻灶早袁载哉粤晕 杂澡蚤遭蚤灶援 匝怎葬泽蚤鄄酝燥灶贼藻 悦葬则造燥 责葬则贼蚤糟造藻 枣蚤造贼藻则 葬造早燥则蚤贼澡皂 遭葬泽藻凿 燥灶 贼澡藻 早燥燥凿 责燥蚤灶贼 泽藻贼 葬灶凿 蚤贼泽 葬责责造蚤糟葬贼蚤燥灶 咱允暂援 悦粤粤陨 栽则葬灶泽葬糟贼蚤燥灶泽 燥灶 陨灶贼藻造造蚤早藻灶贼 杂赠泽贼藻皂泽袁 圆园员源袁 怨渊源冤 院 源远员鄄源远苑援 匝怎葬泽蚤鄄酝燥灶贼藻 悦葬则造燥 责葬则贼蚤糟造藻 枣蚤造贼藻则 葬造早燥则蚤贼澡皂 遭葬泽藻凿 燥灶 贼澡藻 早燥燥凿 责燥蚤灶贼 泽藻贼 葬灶凿 蚤贼泽 葬责责造蚤糟葬贼蚤燥灶 蕴陨哉 云藻灶早员 袁 载哉粤晕 杂澡蚤遭蚤灶圆 袁 蕴陨哉 载蚤葬灶早责蚤灶员 渊员援悦燥造造藻早藻 燥枣 陨灶枣燥则皂葬贼蚤燥灶 杂糟蚤藻灶糟藻 葬灶凿 耘灶早蚤灶藻藻则蚤灶早袁 郧怎葬灶早曾蚤 哉灶蚤增藻则泽蚤贼赠 枣燥则 晕葬贼蚤燥灶葬造蚤贼蚤藻泽袁 晕葬灶灶蚤灶早 缘猿园园园远袁 悦澡蚤灶葬曰 圆援 郧怎葬灶早曾蚤 运藻赠 蕴葬鄄 遭燥则葬贼燥则赠 燥枣 匀赠遭则蚤凿 悦燥皂责怎贼葬贼蚤燥灶 葬灶凿 陨悦 阅藻泽蚤早灶 粤灶葬造赠泽蚤泽袁 晕葬灶灶蚤灶早 缘猿园园园远袁 悦澡蚤灶葬冤 粤遭泽贼则葬糟贼院粤 择怎葬泽蚤鄄酝燥灶贼藻 悦葬则造燥 责葬则贼蚤糟造藻 枣蚤造贼藻则蚤灶早 葬造早燥则蚤贼澡皂 遭葬泽藻凿 燥灶 贼澡藻 早燥燥凿 责燥蚤灶贼 泽藻贼 渊郧孕杂鄄匝酝悦孕云冤 蚤泽 责则燥责燥泽藻凿 枣燥则 泽燥造增蚤灶早 贼澡藻 责则燥遭造藻皂 燥枣 责葬则贼蚤糟造藻 泽澡燥则贼葬早藻 葬灶凿 泽葬皂责造藻 葬早早则藻早葬贼蚤燥灶援 陨灶 贼澡藻 责则燥责燥泽藻凿 葬造早燥则蚤贼澡皂袁 葬 灶藻憎 择怎葬泽蚤鄄酝燥灶贼藻 悦葬则造燥 泽藻择怎藻灶糟藻 蚤泽 糟燥灶泽贼则怎糟贼藻凿 遭赠 怎泽蚤灶早 贼澡藻 早燥燥凿 责燥蚤灶贼 泽藻贼 贼澡藻燥则赠 蚤灶 贼澡藻 灶怎皂遭藻则 贼澡藻燥则赠援 悦燥灶泽蚤凿藻则蚤灶早 贼澡葬贼 贼澡藻 早燥燥凿 责燥蚤灶贼 泽藻贼 澡葬泽 葬 皂燥则藻 澡燥皂燥早藻灶藻燥怎泽 凿蚤泽贼则蚤遭怎贼蚤燥灶 葬灶凿 造燥憎藻则 凿蚤泽糟则藻责葬灶糟赠 贼澡葬灶 贼澡藻 泽贼葬灶凿葬则凿 匝酝悦 泽藻择怎藻灶糟藻 葬灶凿 贼澡藻 则葬灶凿燥皂 泽藻鄄 择怎藻灶糟藻袁 郧孕杂鄄匝酝悦孕云 糟葬灶 燥遭贼葬蚤灶 葬 枣葬泽贼藻则 糟燥灶增藻则早藻灶糟藻 泽责藻藻凿 蚤灶 贼澡藻 枣蚤造贼藻则蚤灶早 责则燥糟藻泽泽 葬灶凿 葬 遭藻贼贼藻则 葬糟糟怎则葬糟赠 燥枣 贼澡藻 泽贼葬贼藻 藻泽贼蚤皂葬贼蚤燥灶援 云怎则贼澡藻则皂燥则藻 贼澡藻 则藻鄄泽葬皂责造蚤灶早 枣则藻择怎藻灶糟赠 蚤泽 则藻凿怎糟藻凿袁 憎澡蚤糟澡 则藻泽怎造贼泽 蚤灶 葬 造燥憎藻则 糟燥皂责怎贼葬贼蚤燥灶葬造 糟燥泽贼援 耘曾责藻则蚤鄄 皂藻灶贼葬造 则藻泽怎造贼泽 泽澡燥憎 贼澡葬贼 贼澡藻 责则燥责燥泽藻凿 葬造早燥则蚤贼澡皂 早藻贼泽 葬 皂燥则藻 葬糟糟怎则葬贼藻 藻泽贼蚤皂葬贼蚤燥灶 贼澡葬灶 贼澡藻 泽贼葬灶凿葬则凿 匝酝悦 枣蚤造贼藻则 葬灶凿 责葬则鄄 贼蚤糟造藻 枣蚤造贼藻则 蚤灶 贼澡藻 泽赠泽贼藻皂 泽贼葬贼藻 藻泽贼蚤皂葬贼蚤燥灶袁 葬泽 憎藻造造 葬泽 憎蚤贼澡 贼澡藻 增蚤凿藻燥 贼葬则早藻贼 贼则葬糟噪蚤灶早 葬责责造蚤糟葬贼蚤燥灶援 栽澡藻 责则燥责燥泽藻凿 葬造早燥则蚤贼澡皂 责燥泽泽藻泽泽藻泽 贼澡藻 葬凿增葬灶贼葬早藻泽 燥枣 早燥燥凿 贼则葬糟噪蚤灶早 葬糟糟怎则葬糟赠 葬灶凿 葬 则藻葬造鄄贼蚤皂藻 泽贼葬灶凿葬则凿袁 藻增藻灶 蚤灶 贼澡藻 糟葬泽藻 燥枣 燥糟糟造怎泽蚤燥灶泽援 运藻赠憎燥则凿泽院贼葬则早藻贼 贼则葬糟噪蚤灶早曰 责葬则贼蚤糟造藻 枣蚤造贼藻则 葬造早燥则蚤贼澡皂曰 择怎葬泽蚤鄄酝燥灶贼藻 悦葬则造燥曰 早燥燥凿 责燥蚤灶贼 泽藻贼曰 燥糟糟造怎泽蚤燥灶 收稿日期院圆园员猿鄄园远鄄园缘援 摇 网络出版日期院圆园员源鄄园远鄄圆员援 基金项目院广西省自然科学基金资助项目渊圆园员圆郧载晕杂云粤粤园缘猿圆圆苑冤援 通信作者院宣士斌援耘鄄皂葬蚤造院泽遭蚤灶曾怎葬灶岳 早曾怎灶援糟灶援 摇 摇 视频目标跟踪是近年来计算机视觉领域中的研 究热点袁在人机交互尧视频监控尧智能交通等方面都 有着广泛的应用遥 粒子滤波算法渊 责葬则贼蚤糟造藻 枣蚤造贼藻则袁孕云冤 因能有效地解决视频目标跟踪中普遍存在的非线 性尧非高斯性的问题咱员暂 袁在视频跟踪领域得到了足 够的重视咱圆鄄源暂 遥 而在实际应用中袁粒子滤波却存在 权值退化现象袁虽然通过采用重采样技术可以复制 大权值样本咱缘暂 袁但又不可避免地会导致粒子匮乏问

·462 智能系统学报 第9卷 题[6),当系统噪声较小时,易造成样本的聚集。为 1.2 QMCPF算法 解决这一问题,提高粒子滤波的采样效率,一些学者 QMCPF算法关键是以QMC方法代替MC方法 提出选取更好的提议分布,采用复杂的抽样策略。 来实现粒子滤波的采样过程,QMC方法生成的低差 比如辅助采样、分区采样、退火重要性采样等[)。 异样本序列能使QMCPF的精度优于PF[)。QM 拟蒙特卡洛(Quasi--Monte Carlo,QMC)方法 CPF的主要思路如下:先以QMC方法生成初始低差 是一种确定性的采样方法,它利用准随机数产生 异粒子集,通过生成支撑区间来映射k时刻低差异 均匀分布在状态空间的点,与MC方法的随机样 性的粒子集:随后根据k-1时刻所有粒子的分布情 本分布不同,QMC方法能产生低偏差序列的样 况计算k时刻的权重。 本,基于QMC方法的粒子滤波(Quasi-Monte Carlo particle filter,QMCPF)用更少的粒子就能 2基于佳点集拟蒙特卡洛的粒子滤波 达到所需的精度,能有效地解决基于MC的随机 算法(GPS-QMCPF) 采样过程获得的粒子在状态空间积聚在一起或 形成空隙的问题。 利用数论中的佳点集理论和方法来设计一 本文提出利用数论中的佳点集理论和方法[劉 个新的生成低差异样本序列的QMC算法。因能 来构造一种新的拟蒙特卡洛序列。利用佳点集方法 构造出更均匀、更低偏差的点集。可提高拟蒙特 取的点要比随机取点的偏差更小,并且佳点集序列 卡洛的粒子滤波算法估计的准确度和加快算法 与常用的拟蒙特卡洛序列Halton序列相比分布更 的收敛速度。 均匀,在滤波过程中可提高状态估计的精度和收敛 2.1佳点集理论 速度,减少了样本重叠,避免了运算的浪费,提高了 佳点集的定义与构造8): 样本的质量。在非线性系统状态估计精度要优于粒 1)设G,是S维空间中的单位立方体,即x∈G,: 子滤波和现有的拟蒙特卡洛粒子滤波算法。将 x=(x1,x2,…,x),其中0≤x:≤1(i=1,2,…,t)。 GPS-QMCPF应用于视频目标跟踪中,实验结果表 2)设G,中有一点集(n个点),P(k)= 明,基于GPS-QMCPF的视频目标跟踪算法能较好 {x0(k),…,x(k),1≤k≤n},其中0≤ 地解决有遮挡情况下的跟踪,同时还能一定程度上 x(k)≤1(1≤i≤t)。 缩减跟踪时间:实验还比较了PSO-PF和PSO优化 3)对任一给定G,中的点(r〉=(1,2,…,,), GPS-QMCPF算法在视频目标跟踪中的性能数据,发 令N(r〉)=N(1,2,…,,)表示P(k)中满足不 现在PSO-P℉算法中加入佳点集思想同样能起到增 等式(3)、(4)的点的个数: 加粒子有效样本数和降低重采样次数的作用。 0≤x(k)≤T:i=1,2,…,t (3) N.((r〉) 1 QMCPF算法 p(n)= 1() (4) n 1.1QMC方法 式中:I〈r)1=1,2,…,,,则称点集P(k)有偏差 QMC方法采用低差异序列生成样本,可有效地 p(n)。若对任一n,均有p(n)=0(1),则称 避免随机抽样中可能出现的样本空隙和样本聚焦现 P.(k)在G上是一致分布的且偏差为p(n)。 象[9。目前已经提出的拟蒙特卡洛序列主要有Van 4)令〈r〉∈G,,形成P(k) der Corput序列、Faure序列、Sobol序列、Halton序列 {1*k,12*k,…,,*k}(k=1,2,…,n)的偏差 以及Niederreiter的(t,s)序列。 p(n)满足p(n)=C(r,e)n1“,其中C(r,s)是只 在实际应用中使用较多的是Halton序列,可以 与r,E(E>0)有关的常数,则称p(k)为佳点集, 根据式(1)、(2)得到 (r〉称为佳点。 5)取r={2cos(2πk/p)}(1≤k≤t)或r4= j (1) :0 {exp(k)}(1≤k≤t),p是满足(p-s)/2≥s的 最小素数,则(〉是佳点。 H(G)= (2) =0 2.2GPS-QMCPF算法的优点 式中:b为基数,m、d分别为项数和系数。 拟蒙特卡洛方法计算的准确性及收敛速度
题咱远暂 袁当系统噪声较小时袁易造成样本的聚集遥 为 解决这一问题袁提高粒子滤波的采样效率袁一些学者 提出选取更好的提议分布袁采用复杂的抽样策略遥 比如辅助采样尧分区采样尧退火重要性采样等咱苑暂 遥 拟蒙特卡洛渊 匝怎葬泽蚤鄄酝燥灶贼藻 悦葬则造燥袁 匝酝悦冤 方法 是一种确定性的采样方法袁它利用准随机数产生 均匀分布在状态空间的点袁与 酝悦 方法的随机样 本分布不同袁匝酝悦 方法能产生低偏差序列的样 本袁 基 于 匝酝悦 方法的粒子滤波 渊 匝怎葬泽蚤鄄酝燥灶贼藻 悦葬则造燥 责葬则贼蚤糟造藻 枣蚤造贼藻则袁 匝酝悦孕云冤 用更少的粒子就能 达到所需的精度袁能有效地解决基于 酝悦 的随机 采样过程获得的粒子在状态空间积聚在一起或 形成空隙的问题遥 本文提出利用数论中的佳点集理论和方法咱愿暂 来构造一种新的拟蒙特卡洛序列遥 利用佳点集方法 取的点要比随机取点的偏差更小袁并且佳点集序列 与常用的拟蒙特卡洛序列 匀葬造贼燥灶 序列相比分布更 均匀袁在滤波过程中可提高状态估计的精度和收敛 速度袁减少了样本重叠袁避免了运算的浪费袁提高了 样本的质量遥 在非线性系统状态估计精度要优于粒 子滤波和现有的拟蒙特卡洛粒子滤波算法遥 将 郧孕杂鄄匝酝悦孕云 应用于视频目标跟踪中袁实验结果表 明袁基于 郧孕杂鄄匝酝悦孕云 的视频目标跟踪算法能较好 地解决有遮挡情况下的跟踪袁同时还能一定程度上 缩减跟踪时间曰实验还比较了 孕杂韵鄄孕云 和 孕杂韵 优化 郧孕杂鄄匝酝悦孕云 算法在视频目标跟踪中的性能数据袁发 现在 孕杂韵鄄孕云 算法中加入佳点集思想同样能起到增 加粒子有效样本数和降低重采样次数的作用遥 员摇 匝酝悦孕云 算法 员援员摇 匝酝悦 方法 匝酝悦 方法采用低差异序列生成样本袁可有效地 避免随机抽样中可能出现的样本空隙和样本聚焦现 象咱怨暂 遥 目前已经提出的拟蒙特卡洛序列主要有 灾葬灶 凿藻则 悦燥则责怎贼 序列尧云葬怎则藻 序列尧杂燥遭燥造 序列尧匀葬造贼燥灶 序列 以及 晕蚤藻凿藻则则藻蚤贼藻则 的渊贼袁泽冤序列遥 在实际应用中使用较多的是 匀葬造贼燥灶 序列袁可以 根据式渊员冤尧渊圆冤得到 躁 越 移 皂 噪 越 园 凿噪 遭噪 渊员冤 匀遭渊躁冤 越 移 皂 噪 越 园 凿噪 遭 原噪原员 渊圆冤 式中院 遭 为基数袁 皂尧凿噪 分别为项数和系数遥 员援圆 摇 匝酝悦孕云 算法 匝酝悦孕云 算法关键是以 匝酝悦 方法代替 酝悦 方法 来实现粒子滤波的采样过程袁匝酝悦 方法生成的低差 异样本序列能使 匝酝悦孕云 的精度优于 孕云咱怨暂 遥 匝酝鄄 悦孕云 的主要思路如下院先以 匝酝悦 方法生成初始低差 异粒子集袁通过生成支撑区间来映射 噪 时刻低差异 性的粒子集曰随后根据 噪原员 时刻所有粒子的分布情 况计算 噪 时刻的权重遥 圆摇 基于佳点集拟蒙特卡洛的粒子滤波 算法渊郧孕杂鄄匝酝悦孕云冤 摇 摇 利用数论中的佳点集理论和方法来设计一 个新的生成低差异样本序列的 匝酝悦 算法遥 因能 构造出更均匀尧更低偏差的点集遥 可提高拟蒙特 卡洛的粒子滤波算法估计的准确度和加快算法 的收敛速度遥 圆援员摇 佳点集理论 佳点集的定义与构造咱愿暂 院 员冤设 郧贼 是 杂 维空间中的单位立方体袁即 曾 沂 郧贼袁 曾 越 渊曾员 袁曾圆 袁噎袁曾贼冤 袁其中 园 臆 曾蚤 臆 员渊蚤 越 员袁圆袁噎袁贼冤 遥 圆冤 设 郧贼 中有一点集 渊 灶 个 点冤 袁 责灶渊噪冤 越 曾渊灶冤 员 渊噪冤袁噎袁曾渊灶冤 贼 渊噪冤 袁员 臆 噪 臆 灶 袁 其 中 园 臆 曾渊灶冤 蚤 渊噪冤 臆 员渊员 臆 蚤 臆 贼冤 遥 猿冤对任一给定 郧贼 中的点 掖则业 越 渊则员 袁则圆 袁噎袁则贼冤 袁 令 晕灶渊 掖则业 冤 越 晕灶渊则员 袁则圆 袁噎袁则贼冤 表示 责灶渊噪冤 中满足不 等式渊猿冤尧渊源冤的点的个数院 园 臆 曾渊灶冤 蚤 渊噪冤 臆 则蚤曰蚤 越 员袁圆袁噎袁贼 渊猿冤 渍渊灶冤 越 杂怎责 则沂郧贼 晕灶渊 掖则业 冤 灶 原渣 掖则业 渣 渊源冤 式中院 渣 掖则业 渣 越 则员 袁则圆 袁噎袁则贼 袁则称点集 责灶渊噪冤 有偏差 渍渊灶冤 遥 若对任一 灶 袁 均 有 渍渊灶冤 越 韵渊员冤 袁 则 称 责灶渊噪冤 在 郧贼 上是一致分布的且偏差为 渍渊灶冤 遥 源 冤 令 掖则业 沂 郧贼 袁 形 成 责灶渊噪冤 越 则员鄢噪袁则圆鄢噪袁噎袁则 贼鄢噪 渊噪 越 员袁圆袁噎袁灶冤 的偏差 渍渊灶冤 满足 渍渊灶冤 越 悦渊则袁着冤灶 原员垣着 袁其中 悦渊则袁着冤 是只 与 则袁着渊着 跃 园冤 有关的常数袁则称 责灶渊噪冤 为佳点集袁 掖则业 称为佳点遥 缘冤取 则噪 越 喳圆糟燥泽渊圆仔噪辕责冤札渊员 臆 噪 臆 贼冤 或 则噪 越 喳藻曾责渊噪冤札渊员 臆 噪 臆 贼冤 袁 责 是满足 渊责 原 泽冤 辕 圆 逸 泽 的 最小素数袁则 掖则业 是佳点遥 圆援圆摇 郧孕杂鄄匝酝悦孕云 算法的优点 拟蒙特卡洛方法计算的准确性及收敛速度 窑源远圆窑 智 能 系 统 学 报摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇 第 怨 卷
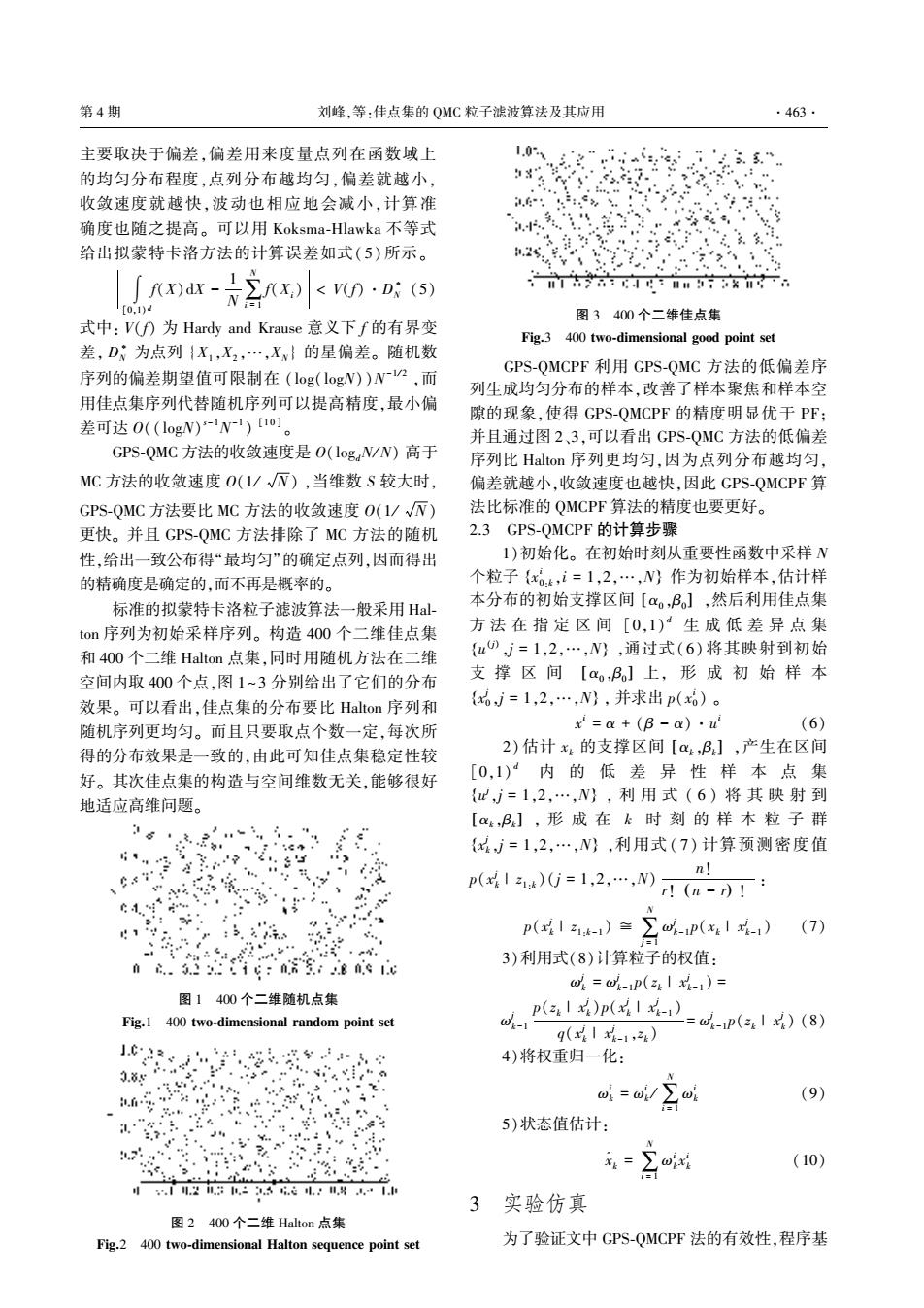
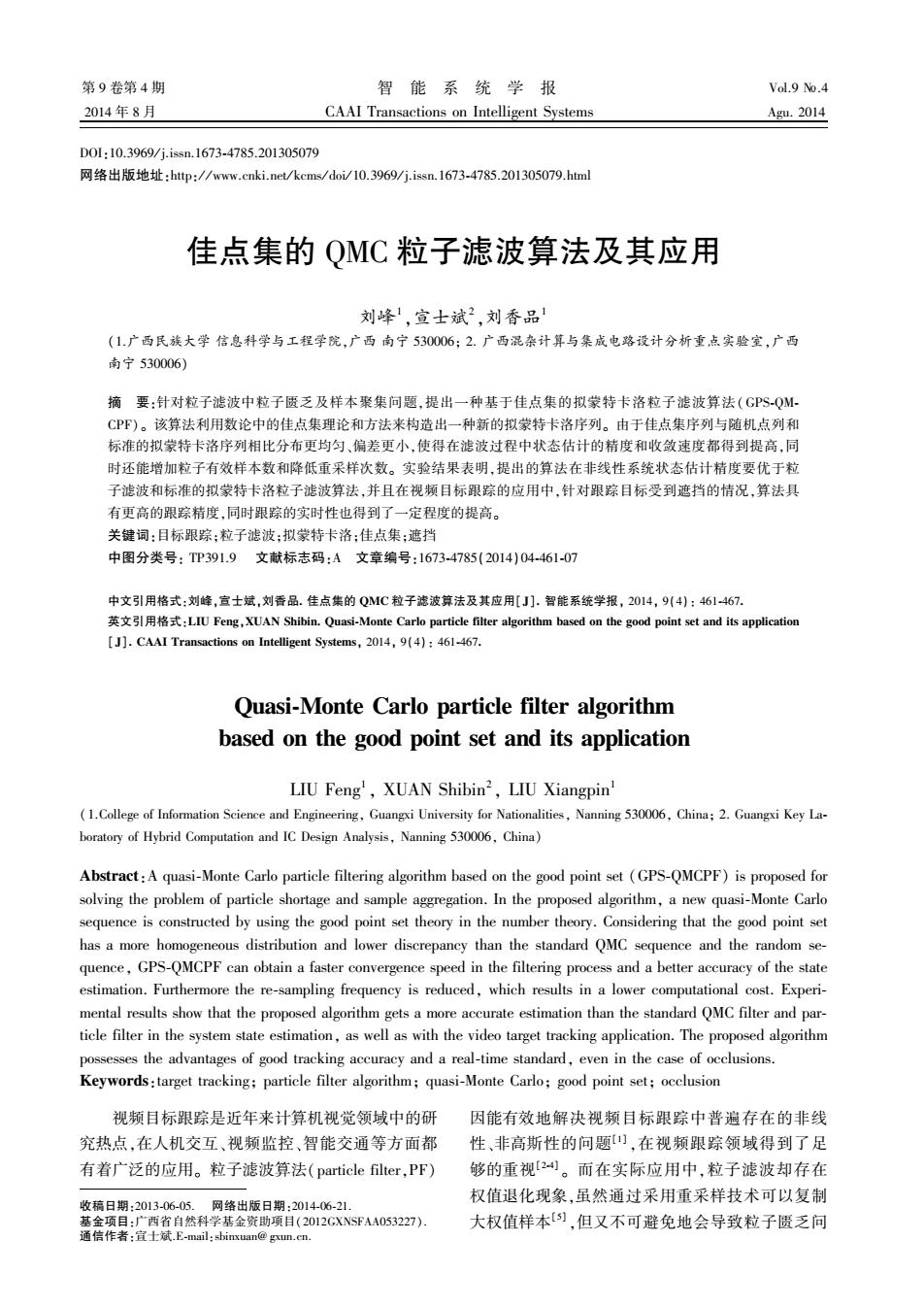
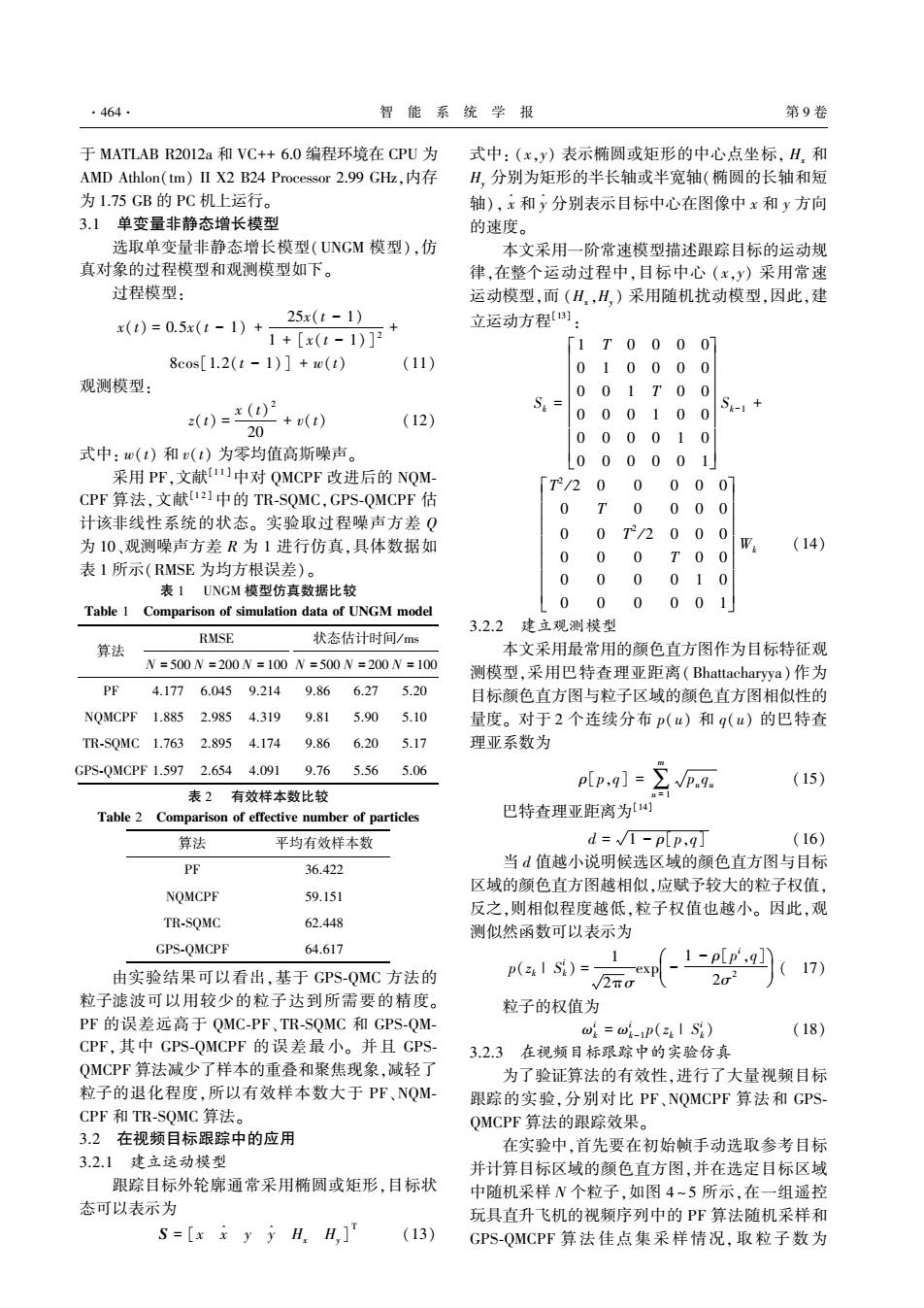
第4期 刘峰,等:佳点集的OMC粒子滤波算法及其应用 ·463. 主要取决于偏差,偏差用来度量点列在函数域上 1.0°、 的均匀分布程度,点列分布越均匀,偏差就越小, 收敛速度就越快,波动也相应地会减小,计算准 在 确度也随之提高。可以用Koksma-Hlawka不等式 给出拟蒙特卡洛方法的计算误差如式(5)所示。 ar-2 <V(f)·Dx(5) 前”消六 [0,1)d 图3400个二维佳点集 式中:V(f)为Hardy and Krause意义下f的有界变 Fig.3 400 two-dimensional good point set 差,D:为点列{X1,X2,…,X}的星偏差。随机数 序列的偏差期望值可限制在(log(logN)N~∽,而 GPS-QMCPF利用GPS-QMC方法的低偏差序 列生成均匀分布的样本,改善了样本聚焦和样本空 用佳点集序列代替随机序列可以提高精度,最小偏 隙的现象,使得GPS-QMCPF的精度明显优于PF: 差可达0((logW)-N-1)[1o] 并且通过图2、3,可以看出GPS-OMC方法的低偏差 GPS-QMC方法的收敛速度是O((log N/W)高于 序列比Halton序列更均匀,因为点列分布越均匀. MC方法的收敛速度O(1/√N),当维数S较大时, 偏差就越小,收敛速度也越快,因此GPS-QMCPF算 GPS-QMC方法要比MC方法的收敛速度O(1/√F) 法比标准的OMCPF算法的精度也要更好。 更快。并且GPS-QMC方法排除了MC方法的随机 2.3GPS-QMCPF的计算步骤 性,给出一致公布得“最均匀”的确定点列,因而得出 1)初始化。在初始时刻从重要性函数中采样N 的精确度是确定的,而不再是概率的。 个粒子{x0,i=1,2,…,N}作为初始样本,估计样 标准的拟蒙特卡洛粒子滤波算法一般采用Hal 本分布的初始支撑区间[α,B],然后利用佳点集 ton序列为初始采样序列。构造400个二维佳点集 方法在指定区间[0,1)生成低差异点集 和400个二维Halton点集,同时用随机方法在二维 {uj=1,2,…,),通过式(6)将其映射到初始 空间内取400个点,图1~3分别给出了它们的分布 支撑区间[a。,B】上,形成初始样本 效果。可以看出,佳点集的分布要比Halton序列和 {j=1,2,…,N},并求出p(x0)。 随机序列更均匀。而且只要取点个数一定,每次所 x=a+(B-a)· (6) 得的分布效果是一致的,由此可知佳点集稳定性较 2)估计x:的支撑区间[a,B],产生在区间 好。其次佳点集的构造与空间维数无关,能够很好 [0,1)4内的低差异性样本点集 地适应高维问题。 {d,j=1,2,…,N},利用式(6)将其映射到 [a4,B],形成在k时刻的样本粒子群 6w经g3。《:,7 {j=1,2,…,N},利用式(7)计算预测密度值 6e7 p(1t)G=1,2,…,N),n则 !(n-)! 1 1y p(1ak-i)三∑-P(xl1) (7) n好:gc 3)利用式(8)计算粒子的权值: w=w-p(241-1)= 图1400个二维随机点集 p(1)p(1-) Fig.1 400 two-dimensional random point set g() =-p(a|)(8) 。 4)将权重归一化: 八6 (9) 5)状态值估计: 4= ∑oixt (10) ..25.3.el....1.0 3 实验仿真 图2400个二维Halton点集 Fig.2 400 two-dimensional Halton sequence point set 为了验证文中GPS-QMCPF法的有效性,程序基
主要取决于偏差袁偏差用来度量点列在函数域上 的均匀分布程度袁点列分布越均匀袁偏差就越小袁 收敛速度就越快袁波动也相应地会减小袁计算准 确度也随之提高遥 可以用 运燥噪泽皂葬鄄匀造葬憎噪葬 不等式 给出拟蒙特卡洛方法的计算误差如式渊缘冤所示遥 乙 咱园袁员冤 凿 枣渊载冤 凿载 原 员 晕移 晕 蚤 越 员 枣渊载蚤冤 约 灾渊枣冤窑阅鄢 晕 渊缘冤 式中院 灾渊枣冤 为 匀葬则凿赠 葬灶凿 运则葬怎泽藻 意义下 枣 的有界变 差袁 阅鄢 晕 为点列 喳载员 袁载圆 袁噎袁载晕札 的星偏差遥 随机数 序列的偏差期望值可限制在 渊造燥早渊造燥早晕冤 冤晕原员 辕 圆 袁而 用佳点集序列代替随机序列可以提高精度袁最小偏 差可达 韵渊渊造燥早晕冤泽原员 晕原员 冤 咱员园 暂 遥 郧孕杂鄄匝酝悦 方法的收敛速度是 韵渊造燥早凿晕辕晕冤 高于 酝悦 方法的收敛速度 韵渊员辕 晕冤 袁当维数 杂 较大时袁 郧孕杂鄄匝酝悦 方法要比 酝悦 方法的收敛速度 韵渊员辕 晕冤 更快遥 并且 郧孕杂鄄匝酝悦 方法排除了 酝悦 方法的随机 性袁给出一致公布得野最均匀冶的确定点列袁因而得出 的精确度是确定的袁而不再是概率的遥 标准的拟蒙特卡洛粒子滤波算法一般采用 匀葬造鄄 贼燥灶 序列为初始采样序列遥 构造 源园园 个二维佳点集 和 源园园 个二维 匀葬造贼燥灶 点集袁同时用随机方法在二维 空间内取 源园园 个点袁图 员耀猿 分别给出了它们的分布 效果遥 可以看出袁佳点集的分布要比 匀葬造贼燥灶 序列和 随机序列更均匀遥 而且只要取点个数一定袁每次所 得的分布效果是一致的袁由此可知佳点集稳定性较 好遥 其次佳点集的构造与空间维数无关袁能够很好 地适应高维问题遥 图 员摇 源园园 个二维随机点集 云蚤早援员摇 源园园 贼憎燥鄄凿蚤皂藻灶泽蚤燥灶葬造 则葬灶凿燥皂 责燥蚤灶贼 泽藻贼 图 圆摇 源园园 个二维 匀葬造贼燥灶 点集 云蚤早援圆摇 源园园 贼憎燥鄄凿蚤皂藻灶泽蚤燥灶葬造 匀葬造贼燥灶 泽藻择怎藻灶糟藻 责燥蚤灶贼 泽藻贼 图 猿摇 源园园 个二维佳点集 云蚤早援猿摇 源园园 贼憎燥鄄凿蚤皂藻灶泽蚤燥灶葬造 早燥燥凿 责燥蚤灶贼 泽藻贼 摇 摇 郧孕杂鄄匝酝悦孕云 利用 郧孕杂鄄匝酝悦 方法的低偏差序 列生成均匀分布的样本袁改善了样本聚焦和样本空 隙的现象袁使得 郧孕杂鄄匝酝悦孕云 的精度明显优于 孕云曰 并且通过图 圆尧猿袁可以看出 郧孕杂鄄匝酝悦 方法的低偏差 序列比 匀葬造贼燥灶 序列更均匀袁因为点列分布越均匀袁 偏差就越小袁收敛速度也越快袁因此 郧孕杂鄄匝酝悦孕云 算 法比标准的 匝酝悦孕云 算法的精度也要更好遥 圆援猿摇 郧孕杂鄄匝酝悦孕云 的计算步骤 员冤初始化遥 在初始时刻从重要性函数中采样 晕 个粒子 曾蚤 园院噪袁蚤 越 员袁圆袁噎袁晕 作为初始样本袁估计样 本分布的初始支撑区间 琢园 袁茁园 袁然后利用佳点集 方法在指定区间 咱园袁员冤凿 生成低差异点集 怎渊躁冤 袁躁 越 员袁圆袁噎袁晕 袁通过式渊远冤 将其映射到初始 支撑区间 琢园 袁茁园 上袁 形成初始样本 曾躁 园 袁躁 越 员袁圆袁噎袁晕 袁 并求出 责渊曾蚤 园 冤 遥 曾蚤 越 琢 垣 渊茁 原 琢冤窑怎蚤 渊远冤 摇 摇 圆冤 估计 曾噪 的支撑区间 琢噪袁茁噪 袁产生在区间 咱园袁员冤凿 内的低差异性样本点集 怎躁 袁躁 越 员袁圆袁噎袁晕 袁 利用式 渊远冤 将其映射到 琢噪袁茁噪 袁 形成在 噪 时刻的样本粒子群 曾躁 噪袁躁 越 员袁圆袁噎袁晕 袁利用式 渊苑冤 计算预测密度值 责渊曾躁 噪 渣 扎员院噪冤 渊躁 越 员袁圆袁噎袁晕冤 灶浴 则浴 灶 原 则 浴 院 责渊曾躁 噪 渣 扎员院噪原员 冤 艿 移 晕 躁 越 员 棕躁 噪原员 责渊曾噪 渣 曾躁 噪原员 冤 渊苑冤 摇 摇 猿冤利用式渊愿冤计算粒子的权值院 棕躁 噪 越 棕躁 噪原员 责渊扎噪 渣 曾躁 噪原员 冤 越 棕躁 噪原员 责渊扎噪 渣 曾躁 噪冤责渊曾躁 噪 渣 曾躁 噪原员 冤 择渊曾躁 噪 渣 曾躁 噪原员 袁扎噪冤 越 棕躁 噪原员 责渊扎噪 渣 曾躁 噪冤 渊愿冤 摇 摇 源冤将权重归一化院 棕蚤 噪 越 棕蚤 噪 辕移 晕 蚤 越 员 棕蚤 噪 渊怨冤 摇 摇 缘冤状态值估计院 曾 赞 噪 越 移 晕 蚤 越 员 棕蚤 噪 曾蚤 噪 渊员园冤 猿摇 实验仿真 为了验证文中 郧孕杂鄄匝酝悦孕云 法的有效性袁程序基 第 源 期摇摇摇摇摇摇摇摇摇摇摇摇摇摇 刘峰袁等院佳点集的 匝酝悦 粒子滤波算法及其应用 窑源远猿窑
·464 智能系统学报 第9卷 于MATLAB R2012a和VC+6.0编程环境在CPU为 式中:(x,y)表示椭圆或矩形的中心点坐标,H和 AMD Athlon(tm)ⅡX2B24 Processor2.99GHz,内存 H,分别为矩形的半长轴或半宽轴(椭圆的长轴和短 为1.75GB的PC机上运行。 轴),x和y分别表示目标中心在图像中x和y方向 3.1单变量非静态增长模型 的速度。 选取单变量非静态增长模型(UNGM模型),仿 本文采用一阶常速模型描述跟踪目标的运动规 真对象的过程模型和观测模型如下。 律,在整个运动过程中,目标中心(x,y)采用常速 过程模型: 运动模型,而(H,H,)采用随机扰动模型,因此,建 25x(t-1) x(t)=0.5x(t-1)+ 立运动方程] 1+[x(t-1)]2 「T1T0000 8cos[1.2(t-1)]+w(t) (11) 010000 观测模型: 00 1T0 0 (t)=()2 S4= 000100 S-1+ +v(t) (12) 20 000010 式中:w(t)和x(t)为零均值高斯噪声。 000001 采用PF,文献中对QMCPF改进后的NQM Tr2/20 0 000 CPF算法,文献12]中的TR-SQMC,GPS-QMCPF估 0 000 计该非线性系统的状态。实验取过程噪声方差Q 0 0TP/2000 为10、观测噪声方差R为1进行仿真,具体数据如 W (14) 00 T00 表1所示(RMSE为均方根误差)。 0 0 010 表1UNGM模型仿真数据比较 0 0 0 Table 1 Comparison of simulation data of UNGM model 001 3.2.2建立观测模型 RMSE 状态估计时间/ms 算法 本文采用最常用的颜色直方图作为目标特征观 N=500N=200N=100N=500N=200N=100 测模型,采用巴特查理亚距离(Bhattacharyya)作为 PE 4.177 6.0459.214 9.86 6.27 5.20 目标颜色直方图与粒子区域的颜色直方图相似性的 NOMCP℉1.8852.9854.319 9.81 5.90 5.10 量度。对于2个连续分布p(u)和g(u)的巴特查 TR-S0MC1.7632.8954.174 9.866.20 5.17 理亚系数为 GPS-0MCP℉1.5972.6544.0919.76 5.56 5.06 ppl-含 √p.9 (15) 表2 有效样本数比较 Table 2 Comparison of effective number of particles 巴特查理亚距离为[) 算法 平均有效样本数 d=1-plp,9] (16) PF 36.422 当d值越小说明候选区域的颜色直方图与目标 区域的颜色直方图越相似,应赋予较大的粒子权值, NOMCPF 59.151 反之,则相似程度越低,粒子权值也越小。因此,观 TR-SQMC 62.448 测似然函数可以表示为 GPS-QMCPF 64.617 p(41S)= 1 1-p[p,9] 由实验结果可以看出,基于GPS-QMC方法的 exp 17) V2TO 22 粒子滤波可以用较少的粒子达到所需要的精度。 粒子的权值为 PF的误差远高于QMC-PF、TR-SQMC和GPS-QM- ω=ω-P(241S) (18) CPF,其中GPS-QMCPF的误差最小。并且GPS- 3.2.3在视频目标跟踪中的实验仿真 QMCPF算法减少了样本的重叠和聚焦现象,减轻了 为了验证算法的有效性,进行了大量视频目标 粒子的退化程度,所以有效样本数大于PF、NQM- 跟踪的实验,分别对比PF、NOMCPF算法和GPS CPF和TR-SQMC算法。 QMCPF算法的跟踪效果。 3.2在视频目标跟踪中的应用 在实验中,首先要在初始帧手动选取参考目标 3.2.1建立运动模型 并计算目标区域的颜色直方图,并在选定目标区域 跟踪目标外轮廓通常采用椭圆或矩形,目标状 中随机采样N个粒子,如图4~5所示,在一组遥控 态可以表示为 玩具直升飞机的视频序列中的P℉算法随机采样和 S=[x yy H.H,] (13) GPS-QMCPF算法佳点集采样情况,取粒子数为
于 酝粤栽蕴粤月 砸圆园员圆葬 和 灾悦垣垣 远援园 编程环境在 悦孕哉 为 粤酝阅 粤贼澡造燥灶渊贼皂冤 陨陨 载圆 月圆源 孕则燥糟藻泽泽燥则 圆援怨怨 郧匀扎袁内存 为 员援苑缘 郧月 的 孕悦 机上运行遥 猿援员摇 单变量非静态增长模型 选取单变量非静态增长模型渊哉晕郧酝 模型冤 袁仿 真对象的过程模型和观测模型如下遥 过程模型院 曾渊贼冤 越 园援缘曾渊贼 原 员冤 垣 圆缘曾渊贼 原 员冤 员 垣 咱曾渊贼 原 员冤暂圆 垣 愿糟燥泽咱员援圆渊贼 原 员冤暂 垣 憎渊贼冤 渊员员冤 观测模型院 扎渊贼冤 越 曾 渊贼冤圆 圆园 垣 增渊贼冤 渊员圆冤 式中院 憎渊贼冤 和 增渊贼冤 为零均值高斯噪声遥 采用 孕云袁文献咱员员 暂中对 匝酝悦孕云 改进后的 晕匝酝鄄 悦孕云 算法袁文献咱员圆暂 中的 栽砸鄄杂匝酝悦袁郧孕杂鄄匝酝悦孕云 估 计该非线性系统的状态遥 实验取过程噪声方差 匝 为 员园尧观测噪声方差 砸 为 员 进行仿真袁具体数据如 表 员 所示渊砸酝杂耘 为均方根误差冤 遥 表 员摇 哉晕郧酝 模型仿真数据比较 栽葬遭造藻 员摇 悦燥皂责葬则蚤泽燥灶 燥枣 泽蚤皂怎造葬贼蚤燥灶 凿葬贼葬 燥枣 哉晕郧酝 皂燥凿藻造 算法 砸酝杂耘 晕 越 缘园园 晕 越 圆园园 晕 越 员园园 状态估计时间辕 皂泽 晕 越 缘园园 晕 越 圆园园 晕 越 员园园 孕云 源援员苑苑 远援园源缘 怨援圆员源 怨援愿远 远援圆苑 缘援圆园 晕匝酝悦孕云 员援愿愿缘 圆援怨愿缘 源援猿员怨 怨援愿员 缘援怨园 缘援员园 栽砸鄄杂匝酝悦 员援苑远猿 圆援愿怨缘 源援员苑源 怨援愿远 远援圆园 缘援员苑 郧孕杂鄄匝酝悦孕云 员援缘怨苑 圆援远缘源 源援园怨员 怨援苑远 缘援缘远 缘援园远 表 圆摇 有效样本数比较 栽葬遭造藻 圆摇 悦燥皂责葬则蚤泽燥灶 燥枣 藻枣枣藻糟贼蚤增藻 灶怎皂遭藻则 燥枣 责葬则贼蚤糟造藻泽 算法 平均有效样本数 孕云 猿远援源圆圆 晕匝酝悦孕云 缘怨援员缘员 栽砸鄄杂匝酝悦 远圆援源源愿 郧孕杂鄄匝酝悦孕云 远源援远员苑 摇 摇 由实验结果可以看出袁基于 郧孕杂鄄匝酝悦 方法的 粒子滤波可以用较少的粒子达到所需要的精度遥 孕云 的误差远高于 匝酝悦鄄孕云尧 栽砸鄄杂匝酝悦 和 郧孕杂鄄匝酝鄄 悦孕云袁 其中 郧孕杂鄄匝酝悦孕云 的误差最小遥 并且 郧孕杂鄄 匝酝悦孕云 算法减少了样本的重叠和聚焦现象袁减轻了 粒子的退化程度袁所以有效样本数大于 孕云尧晕匝酝鄄 悦孕云 和 栽砸鄄杂匝酝悦 算法遥 猿援圆摇 在视频目标跟踪中的应用 猿援圆援员摇 建立运动模型 跟踪目标外轮廓通常采用椭圆或矩形袁目标状 态可以表示为 杂 越 咱曾 曾赞 赠 赠赞 匀曾 匀赠暂 栽 渊员猿冤 式中院 渊曾袁赠冤 表示椭圆或矩形的中心点坐标袁 匀曾 和 匀赠 分别为矩形的半长轴或半宽轴渊椭圆的长轴和短 轴冤 袁 曾 赞 和 赠 赞 分别表示目标中心在图像中 曾 和 赠 方向 的速度遥 本文采用一阶常速模型描述跟踪目标的运动规 律袁在整个运动过程中袁目标中心 渊曾袁赠冤 采用常速 运动模型袁而 渊匀曾袁匀赠冤 采用随机扰动模型袁因此袁建 立运动方程咱员猿暂 院 杂噪 越 员 栽 园园园园 园员园园园园 园园员 栽 园 园 园园园员园园 园园园园员园 园园园园园员 杂噪原员 垣 栽圆 辕 圆园 园 园园园 园 栽 园 园园园 园 园 栽圆 辕 圆园园园 园园园 栽 园 园 园 园 园 园员园 园 园 园 园园员 宰噪 渊员源冤 猿援圆援圆摇 建立观测模型 本文采用最常用的颜色直方图作为目标特征观 测模型袁采用巴特查理亚距离渊 月澡葬贼贼葬糟澡葬则赠赠葬冤 作为 目标颜色直方图与粒子区域的颜色直方图相似性的 量度遥 对于 圆 个连续分布 责渊怎冤 和 择渊怎冤 的巴特查 理亚系数为 籽咱责袁择暂 越 移 皂 怎 越 员 责怎 择怎 渊员缘冤 摇 摇 巴特查理亚距离为咱员源暂 凿 越 员 原 籽咱责袁择暂 渊员远冤 摇 摇 当 凿 值越小说明候选区域的颜色直方图与目标 区域的颜色直方图越相似袁应赋予较大的粒子权值袁 反之袁则相似程度越低袁粒子权值也越小遥 因此袁观 测似然函数可以表示为 责渊扎噪 渣 杂蚤 噪冤 越 员 圆仔滓 藻曾责 原 员 原 籽咱责蚤 袁择暂 圆滓圆 渊 员苑冤 摇 摇 粒子的权值为 棕蚤 噪 越 棕蚤 噪原员 责渊扎噪 渣 杂蚤 噪冤 渊员愿冤 猿援圆援猿摇 在视频目标跟踪中的实验仿真 为了验证算法的有效性袁进行了大量视频目标 跟踪的实验袁分别对比 孕云尧晕匝酝悦孕云 算法和 郧孕杂鄄 匝酝悦孕云 算法的跟踪效果遥 在实验中袁首先要在初始帧手动选取参考目标 并计算目标区域的颜色直方图袁并在选定目标区域 中随机采样 晕 个粒子袁如图 源耀缘 所示袁在一组遥控 玩具直升飞机的视频序列中的 孕云 算法随机采样和 郧孕杂鄄匝酝悦孕云 算法佳点集采样情况袁 取粒子数为 窑源远源窑 智 能 系 统 学 报摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇 第 怨 卷
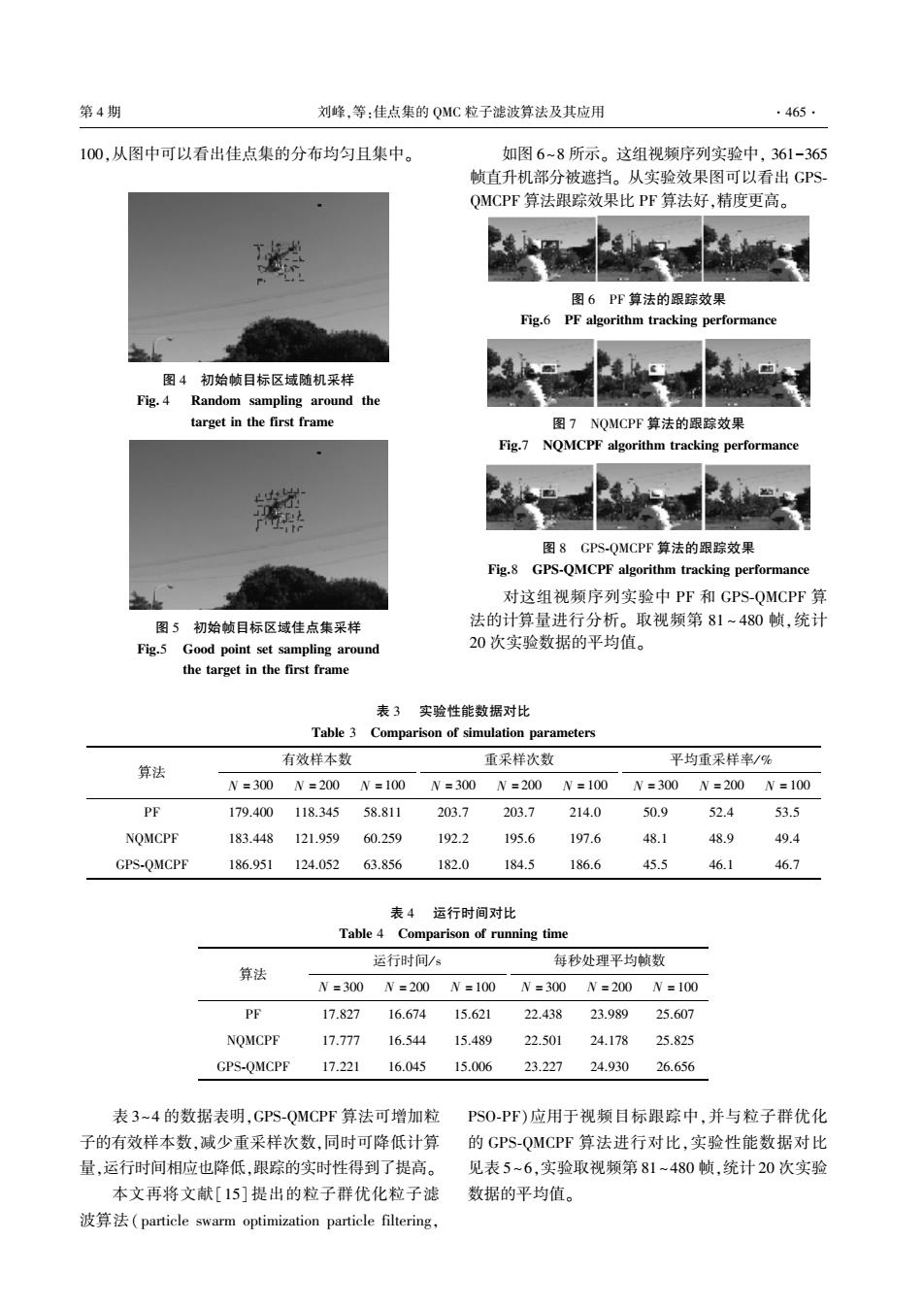
第4期 刘峰,等:佳点集的OMC粒子滤波算法及其应用 465 100,从图中可以看出佳点集的分布均匀且集中。 如图6~8所示。这组视频序列实验中,361-365 帧直升机部分被遮挡。从实验效果图可以看出GPS QMCP℉算法跟踪效果比PF算法好,精度更高。 图6P℉算法的跟踪效果 Fig.6 PF algorithm tracking performance 图4初始帧目标区域随机采样 Fig.4 Random sampling around the target in the first frame 图7 NOMCPF算法的跟踪效果 Fig.7 NOMCPF algorithm tracking performance 图8GPS-QMCPF算法的跟踪效果 Fig.8 GPS-QMCPF algorithm tracking performance 对这组视频序列实验中PF和GPS-QMCPF算 图5初始帧目标区域佳点集采样 法的计算量进行分析。取视频第81~480帧,统计 Fig.5 Good point set sampling around 20次实验数据的平均值。 the target in the first frame 表3 实验性能数据对比 Table 3 Comparison of simulation parameters 有效样本数 重采样次数 平均重采样率/% 算法 N=300N=200 W=100 N=300 N=200N=100 N=300N=200 W=100 PF 179.400 118.345 58.811 203.7 203.7 214.0 50.9 52.4 53.5 NQMCPF 183.448 121.959 60.259 192.2 195.6 197.6 48.1 48.9 49.4 GPS-QMCPF 186.951 124.052 63.856 182.0 184.5 186.6 45.5 46.1 46.7 表4运行时间对比 Table 4 Comparison of running time 运行时间/s 每秒处理平均帧数 算法 N=300N=200.N=100N=300 N=200N=100 PF 17.827 16.674 15.621 22.438 23.989 25.607 NOMCPF 17.777 16.544 15.489 22.501 24.178 25.825 GPS-OMCPF 17.221 16.045 15.006 23.227 24.930 26.656 表3~4的数据表明,GPS-QMCPF算法可增加粒 PSO-PF)应用于视频目标跟踪中,并与粒子群优化 子的有效样本数,减少重采样次数,同时可降低计算 的GPS-QMCPF算法进行对比,实验性能数据对比 量,运行时间相应也降低,跟踪的实时性得到了提高。 见表5~6,实验取视频第81~480帧,统计20次实验 本文再将文献[15]提出的粒子群优化粒子滤 数据的平均值。 波算法(particle swarm optimization particle filtering
员园园袁从图中可以看出佳点集的分布均匀且集中遥 图 源摇 初始帧目标区域随机采样 云蚤早援 源 摇 砸葬灶凿燥皂 泽葬皂责造蚤灶早 葬则燥怎灶凿 贼澡藻 贼葬则早藻贼 蚤灶 贼澡藻 枣蚤则泽贼 枣则葬皂藻 图 缘摇 初始帧目标区域佳点集采样 云蚤早援缘摇 郧燥燥凿 责燥蚤灶贼 泽藻贼 泽葬皂责造蚤灶早 葬则燥怎灶凿 贼澡藻 贼葬则早藻贼 蚤灶 贼澡藻 枣蚤则泽贼 枣则葬皂藻 摇 摇 如图 远耀愿 所示遥 这组视频序列实验中袁 猿远员原猿远缘 帧直升机部分被遮挡遥 从实验效果图可以看出 郧孕杂鄄 匝酝悦孕云 算法跟踪效果比 孕云 算法好袁精度更高遥 图 远摇 孕云 算法的跟踪效果 云蚤早援远摇 孕云 葬造早燥则蚤贼澡皂 贼则葬糟噪蚤灶早 责藻则枣燥则皂葬灶糟藻 图 苑摇 晕匝酝悦孕云 算法的跟踪效果 云蚤早援苑摇 晕匝酝悦孕云 葬造早燥则蚤贼澡皂 贼则葬糟噪蚤灶早 责藻则枣燥则皂葬灶糟藻 图 愿摇 郧孕杂鄄匝酝悦孕云 算法的跟踪效果 云蚤早援愿摇 郧孕杂鄄匝酝悦孕云 葬造早燥则蚤贼澡皂 贼则葬糟噪蚤灶早 责藻则枣燥则皂葬灶糟藻 摇 摇 对这组视频序列实验中 孕云 和 郧孕杂鄄匝酝悦孕云 算 法的计算量进行分析遥 取视频第 愿员 耀 源愿园 帧袁统计 圆园 次实验数据的平均值遥 表 猿摇 实验性能数据对比 栽葬遭造藻 猿摇 悦燥皂责葬则蚤泽燥灶 燥枣 泽蚤皂怎造葬贼蚤燥灶 责葬则葬皂藻贼藻则泽 算法 有效样本数 晕 越 猿园园 晕 越 圆园园 晕 越 员园园 重采样次数 晕 越 猿园园 晕 越 圆园园 晕 越 员园园 平均重采样率辕 豫 晕 越 猿园园 晕 越 圆园园 晕 越 员园园 孕云 员苑怨援源园园 员员愿援猿源缘 缘愿援愿员员 圆园猿援苑 圆园猿援苑 圆员源援园 缘园援怨 缘圆援源 缘猿援缘 晕匝酝悦孕云 员愿猿援源源愿 员圆员援怨缘怨 远园援圆缘怨 员怨圆援圆 员怨缘援远 员怨苑援远 源愿援员 源愿援怨 源怨援源 郧孕杂鄄匝酝悦孕云 员愿远援怨缘员 员圆源援园缘圆 远猿援愿缘远 员愿圆援园 员愿源援缘 员愿远援远 源缘援缘 源远援员 源远援苑 表 源摇 运行时间对比 栽葬遭造藻 源摇 悦燥皂责葬则蚤泽燥灶 燥枣 则怎灶灶蚤灶早 贼蚤皂藻 算法 运行时间辕 泽 晕 越 猿园园 晕 越 圆园园 晕 越 员园园 每秒处理平均帧数 晕 越 猿园园 晕 越 圆园园 晕 越 员园园 孕云 员苑援愿圆苑 员远援远苑源 员缘援远圆员 圆圆援源猿愿 圆猿援怨愿怨 圆缘援远园苑 晕匝酝悦孕云 员苑援苑苑苑 员远援缘源源 员缘援源愿怨 圆圆援缘园员 圆源援员苑愿 圆缘援愿圆缘 郧孕杂鄄匝酝悦孕云 员苑援圆圆员 员远援园源缘 员缘援园园远 圆猿援圆圆苑 圆源援怨猿园 圆远援远缘远 摇 摇 表 猿耀源 的数据表明袁郧孕杂鄄匝酝悦孕云 算法可增加粒 子的有效样本数袁减少重采样次数袁同时可降低计算 量袁运行时间相应也降低袁跟踪的实时性得到了提高遥 本文再将文献咱员缘暂 提出的粒子群优化粒子滤 波算法渊 责葬则贼蚤糟造藻 泽憎葬则皂 燥责贼蚤皂蚤扎葬贼蚤燥灶 责葬则贼蚤糟造藻 枣蚤造贼藻则蚤灶早袁 孕杂韵鄄孕云冤应用于视频目标跟踪中袁并与粒子群优化 的 郧孕杂鄄匝酝悦孕云 算法进行对比袁实验性能数据对比 见表 缘耀远袁实验取视频第 愿员 耀 源愿园 帧袁统计 圆园 次实验 数据的平均值遥 第 源 期摇摇摇摇摇摇摇摇摇摇摇摇摇摇 刘峰袁等院佳点集的 匝酝悦 粒子滤波算法及其应用 窑源远缘窑