第9卷第3期 智能系统学报 Vol.9 No.3 2014年6月 CAAI Transactions on Intelligent Systems Jun.2014 D0:10.3969/j.issn.1673-4785.201309004 网络出版地址:http://www.enki..net/kcms/doi/10.3969/j.issn.16734785.201309004.html 仿生机器鱼运动控制方法综述 王耀威,纪志坚,翟海川 (青岛大学自动化工程学院,山东青岛266071) 摘要:运动控制是仿生机器鱼研究的核心问题,为此,依据解决运动控制问题的不同思路,总结了仿生机器鱼运动 控制常见的几种研究方法:基于杆系结构的鱼体波曲线拟合法、正弦控制器方法和基于中枢模式发生器模型的方 法,分别对3种运动控制方法的基本原理和特点进行了总结和归纳,分析了3种方法在可靠性、稳定性和实时性等方 面的优缺点,最后指出了仿生机器鱼运动控制方法的发展趋势。 关键词:仿生机器鱼:运动控制:正弦控制器:鱼体波曲线拟合:中枢模式发生器 中图分类号:TP301.6文献标志码:A文章编号:1673-4785(2014)03-0276-09 中文引用格式:王耀威,纪志坚,翟海川.仿生机器鱼运动控制方法综述[J】.智能系统学报,2014,9(3):276284. 英文引用格式:WANG Yaowei,JI Zhijian,ZHAI Haichuan..A survey on motion control of the biomimetic robotic fish[J].CAAI Transactions on Intelligent Systems,2014,9(3):276-284. A survey on motion control of the biomimetic robotic fish WANG Yaowei,JI Zhijian,ZHAI Haichuan (School of Automation Engineering,Qingdao University,Qingdao 266071,China) Abstract:Motion control is the key issue in the biomimetic robotic fish research.This paper presents a comprehen- sive review of motion control of the biomimetic robotic fish under different scenarios.Proposals for motion control of the biomimetic robotic fish reviewed include the method of curve fitting of the fish body wave based on the structure of the bar system,the method of sinusoidal controller and the method based on the central pattern generator (CPG).The principles of each of these methods as well as the corresponding characteristics are discussed,and then the advantages and disadvantages of the three methods are analyzed in respect to their reliability,stability and real-time performance.The developing trends of motion control of the biomimetic robotic fish are also pointed out. Keywords:biomimetic robotic fish;motion control;sinusoidal controller;fish body wave curve fitting;central pat- tern generator 鱼类作为自然界最早出现的脊椎动物,其种类 人类的发展离不开资源的持续供应,随着陆上 繁多,生活环境各异,为了觅食、御敌、繁殖后代和集 资源的日益紧缺,未来海洋资源的开发成为现在研 群洄游等生存需要,经过亿万年的自然选择进化出 究的热点。随着人类科学和技术的不断发展进步 了非凡的水中运动能力,其游动具有推进效率高、机 适应各种非结构化环境的水下机器人将会得到迅猛 动性强、隐蔽性好、噪声低等优点[)。鱼类在水中 的发展。传统的基于螺旋桨的人造水下航行器,在 游动的完美性,吸引着大批学者研究鱼类的运动机 启动、加速性能、运动灵活性、受承载空间等方面的 理和开发仿鱼类水下机器人。 缺点限制了其作业时间和范围,进一步限制了其应 用领域)。仿生机器鱼作为一种结合了鱼类推进 收稿日期:2013-09-01.网络出版日期:2014-06-14. 基金项目:国家自然科学基金资助项目(61374062,61075114). 模式和机器人技术的新型水下机器人,与传统的基 通信作者:纪志坚.E-mail:jizhijian@pku.org.cn 于螺旋桨的人造水下航行器相比,具有以下几方面
第 9 卷第 3 期 智 能 系 统 学 报 Vol.9 №.3 2014 年 6 月 CAAI Transactions on Intelligent Systems Jun. 2014 DOI:10.3969 / j.issn.1673⁃4785.201309004 网络出版地址:http: / / www.cnki.net / kcms/ doi / 10.3969 / j.issn.16734785.201309004.html 仿生机器鱼运动控制方法综述 王耀威,纪志坚,翟海川 (青岛大学 自动化工程学院,山东 青岛 266071) 摘 要:运动控制是仿生机器鱼研究的核心问题,为此,依据解决运动控制问题的不同思路,总结了仿生机器鱼运动 控制常见的几种研究方法:基于杆系结构的鱼体波曲线拟合法、正弦控制器方法和基于中枢模式发生器模型的方 法,分别对 3 种运动控制方法的基本原理和特点进行了总结和归纳,分析了 3 种方法在可靠性、稳定性和实时性等方 面的优缺点,最后指出了仿生机器鱼运动控制方法的发展趋势。 关键词:仿生机器鱼;运动控制;正弦控制器;鱼体波曲线拟合;中枢模式发生器 中图分类号: TP301.6 文献标志码:A 文章编号:1673⁃4785(2014)03⁃0276⁃09 中文引用格式:王耀威,纪志坚,翟海川. 仿生机器鱼运动控制方法综述[J]. 智能系统学报, 2014, 9(3): 276⁃284. 英文引用格式:WANG Yaowei, JI Zhijian, ZHAI Haichuan. A survey on motion control of the biomimetic robotic fish[J]. CAAI Transactions on Intelligent Systems, 2014, 9(3): 276⁃284. A survey on motion control of the biomimetic robotic fish WANG Yaowei, JI Zhijian, ZHAI Haichuan (School of Automation Engineering, Qingdao University, Qingdao 266071, China) Abstract:Motion control is the key issue in the biomimetic robotic fish research. This paper presents a comprehen⁃ sive review of motion control of the biomimetic robotic fish under different scenarios. Proposals for motion control of the biomimetic robotic fish reviewed include the method of curve fitting of the fish body wave based on the structure of the bar system, the method of sinusoidal controller and the method based on the central pattern generator (CPG). The principles of each of these methods as well as the corresponding characteristics are discussed , and then the advantages and disadvantages of the three methods are analyzed in respect to their reliability, stability and real⁃time performance. The developing trends of motion control of the biomimetic robotic fish are also pointed out. Keywords:biomimetic robotic fish; motion control; sinusoidal controller; fish body wave curve fitting; central pat⁃ tern generator 收稿日期:2013⁃09⁃01. 网络出版日期:2014⁃06⁃14. 基金项目:国家自然科学基金资助项目(61374062,61075114). 通信作者:纪志坚.E⁃mail:jizhijian@ pku.org.cn. 鱼类作为自然界最早出现的脊椎动物,其种类 繁多,生活环境各异,为了觅食、御敌、繁殖后代和集 群洄游等生存需要,经过亿万年的自然选择进化出 了非凡的水中运动能力,其游动具有推进效率高、机 动性强、隐蔽性好、噪声低等优点[1] 。 鱼类在水中 游动的完美性,吸引着大批学者研究鱼类的运动机 理和开发仿鱼类水下机器人。 人类的发展离不开资源的持续供应,随着陆上 资源的日益紧缺,未来海洋资源的开发成为现在研 究的热点。 随着人类科学和技术的不断发展进步, 适应各种非结构化环境的水下机器人将会得到迅猛 的发展。 传统的基于螺旋桨的人造水下航行器,在 启动、加速性能、运动灵活性、受承载空间等方面的 缺点限制了其作业时间和范围,进一步限制了其应 用领域[2] 。 仿生机器鱼作为一种结合了鱼类推进 模式和机器人技术的新型水下机器人,与传统的基 于螺旋桨的人造水下航行器相比,具有以下几方面

第3期 王耀威,等:仿生机器鱼运动控制方法综述 ·277. 基本特性):1)推进效率高,运动能力强,机动性能 类学家对游动鱼体观测得到的运动学方程作为模 好:2)系统结构简化,机械结构简单:3)流体性能优 型,来产生类似鱼类的游动步态,采用离线数值拟合 良:4)体积小、重量轻、隐蔽性强。仿生机器鱼的这 的方法获得多个关节的控制量,并对机器鱼各个关 些优点将会使其在以下领域得到广泛应用: 节之间的长度比进行参数优化来最大程度地拟合鱼 1)仿生机器鱼可在要求作业范围大、时间长、 体波曲线[5]。 机动性好的场合得以应用,如环境监测、管道内部结 鱼类的身体由多根脊椎骨相互连接而成,采用 构监测、海底救生等: 尾鳍推进的鱼类在游动时主要通过脊椎曲线的波动 2)在军事方面,仿生机器鱼良好的隐蔽性可使 带动尾鳍摆动来产生推进力,仿生机器鱼通过模仿 其作为水下侦察器或攻击性武器: 鱼类的推进机理实现游动,国内外很多学者致力于 3)海洋资源开发方面,由于仿生机器鱼在游动 此方面研究,并取得了丰硕的成果[82] 的方式和外形上皆与鱼类相似,因此,在人类开发海 鱼类游动具有极高的推进效率,在研究鱼类的 洋资源和研究海洋生物资源的同时,可有效降低人 运动学模型时,如何借鉴鱼类运动得到一种高效的 类活动对海洋生态环境造成的破坏; 推进模式是十分有意义的。文献[23]提出了一种 4)可构建多机器鱼协作系统,用来完成单个机 将描述鱼体稳定游动的周期性运动和描述鱼体身体 器鱼无法完成的复杂水下任务[: 形状改变的非周期性运动相分离的方法,来对鱼的 5)在娱乐方面,随着机器人制造工艺的进步和 躯体运动进行运动学建模。文献[24]提出了多坐 技术创新,用于娱乐和观赏用途的仿生机器鱼将以 标系转换的运动学模型,为基于波动鳍推进模式的 优美的姿态和低廉的价格走向市场5)。 多鳍推进控制系统设计方案为水下机器人的仿生设 仿生机器鱼在以上方面获得了广泛应用,而寻 计提供了一个新的思路和选择,但仅能对理想的仿 求一种最优高效地仿生机器鱼运动控制方法,使机 鱼波动面进行运动描述。 器鱼更加准确和高效地完成任务成为研究的重点。 一些学者对非鲹科鱼类进行研究,通过观察其 本文在仿生机器鱼研究进展综述文献[7-12]的基础 形态学特点,对运动学特性进行观测,并建立了相应 上,结合仿生机器鱼运动控制最新成果,对仿生机器 的运动学模型252列 鱼的运动控制方法进行了总结和归纳,为相关领域 1.2基于动力学模型的方法 工作者提供有益的参考。 由于鱼类在水中的游动涉及鱼体的运动学和复 1仿生机器鱼运动分析 杂的水动力学,在现有的水动力学基础上很难通过解 析的方法建立精确的数学模型,因此,现阶段仿生机 仿生机器鱼运动控制方法可大致分为3类:基 器鱼的运动控制皆建立在简化的水动力学模型之上。 于运动学模型、基于动力学模型和仿神经元网络控 对鱼类游动时的水动力学研究,国外学者 制的方法。 Wu[2】,Lighthill90]和Videler3]分别提出了“二维 1.1基于运动学模型的方法 波动板理论”、“大摆幅细长体理论”和“薄体理论”, 此方法是通过经验观测鱼类游动时身体的形状 为仿生机器鱼的动力学研究奠定了基础。20世纪 曲线来产生机器鱼关节的摆角。鱼类行为学家研究 80年代中后期,中国科学技术大学的童秉纲和程建 表明,鱼类的推进运动中隐含着一种由后颈部向尾部 宇博士采用半解析-半数值的方法,提出了三维波 传播的行波。受此启发人们尝试从运动学的角度来 动板理论,得到了国际上鱼类生物力学研究群体的 研究鱼类的推进,以避免复杂的水动力学分析。国外 广泛运用和认同[32.] 对该种方法的研究起步较早。1960年,Lightil训首次 通过分析鱼体在纵向、横向和沉浮方向的力学 基于“小振幅位势理论”建立了分析鱼类参科推进模 分析和计算,建立仿生机器鱼游动时的水动力学模 式的数学模型,这是鱼类推进模式研究历史上第一个 型,采用几何非线性方法、在线反馈跟踪或离线运动 关于鲹科推进模式的数学模型]。1996年,美国麻 规划等方法,对机器鱼的运动控制策略进行研究,仍 省理工学院的Barrett等通过实验研究,认为鱼体游 是主要的研究方法。国内外在此方面的动力学建模 动呈波动状态,鱼体波为一波幅渐增的正弦曲线,鱼 研究成果颇丰344] 体波波幅包络线具有二次曲线特征,鱼体波可以通过 在水动力学理论的改进和优化方面,文献[45] 波幅包络线与正弦曲线的合成得到[ 和文献[46]通过运用改进了的“大振幅细长体理 为了产生类似鱼类的游动步态,Yu和Liu用鱼 论”和“二维波动板理论”,对仿生机器鱼的动力学
基本特性[3] :1)推进效率高,运动能力强,机动性能 好;2)系统结构简化,机械结构简单;3)流体性能优 良;4)体积小、重量轻、隐蔽性强。 仿生机器鱼的这 些优点将会使其在以下领域得到广泛应用: 1)仿生机器鱼可在要求作业范围大、时间长、 机动性好的场合得以应用,如环境监测、管道内部结 构监测、海底救生等; 2)在军事方面,仿生机器鱼良好的隐蔽性可使 其作为水下侦察器或攻击性武器; 3)海洋资源开发方面,由于仿生机器鱼在游动 的方式和外形上皆与鱼类相似,因此,在人类开发海 洋资源和研究海洋生物资源的同时,可有效降低人 类活动对海洋生态环境造成的破坏; 4)可构建多机器鱼协作系统,用来完成单个机 器鱼无法完成的复杂水下任务[4] ; 5)在娱乐方面,随着机器人制造工艺的进步和 技术创新,用于娱乐和观赏用途的仿生机器鱼将以 优美的姿态和低廉的价格走向市场[5 ⁃ 6] 。 仿生机器鱼在以上方面获得了广泛应用,而寻 求一种最优高效地仿生机器鱼运动控制方法,使机 器鱼更加准确和高效地完成任务成为研究的重点。 本文在仿生机器鱼研究进展综述文献[7⁃12]的基础 上,结合仿生机器鱼运动控制最新成果,对仿生机器 鱼的运动控制方法进行了总结和归纳,为相关领域 工作者提供有益的参考。 1 仿生机器鱼运动分析 仿生机器鱼运动控制方法可大致分为 3 类:基 于运动学模型、基于动力学模型和仿神经元网络控 制的方法。 1.1 基于运动学模型的方法 此方法是通过经验观测鱼类游动时身体的形状 曲线来产生机器鱼关节的摆角。 鱼类行为学家研究 表明,鱼类的推进运动中隐含着一种由后颈部向尾部 传播的行波。 受此启发人们尝试从运动学的角度来 研究鱼类的推进,以避免复杂的水动力学分析。 国外 对该种方法的研究起步较早。 1960 年,Lightill 首次 基于“小振幅位势理论”建立了分析鱼类鲹科推进模 式的数学模型,这是鱼类推进模式研究历史上第一个 关于鲹科推进模式的数学模型[13] 。 1996 年,美国麻 省理工学院的 Barrett 等通过实验研究,认为鱼体游 动呈波动状态,鱼体波为一波幅渐增的正弦曲线,鱼 体波波幅包络线具有二次曲线特征,鱼体波可以通过 波幅包络线与正弦曲线的合成得到[14] 。 为了产生类似鱼类的游动步态,Yu 和 Liu 用鱼 类学家对游动鱼体观测得到的运动学方程作为模 型,来产生类似鱼类的游动步态,采用离线数值拟合 的方法获得多个关节的控制量,并对机器鱼各个关 节之间的长度比进行参数优化来最大程度地拟合鱼 体波曲线[15 ⁃ 17] 。 鱼类的身体由多根脊椎骨相互连接而成,采用 尾鳍推进的鱼类在游动时主要通过脊椎曲线的波动 带动尾鳍摆动来产生推进力,仿生机器鱼通过模仿 鱼类的推进机理实现游动,国内外很多学者致力于 此方面研究,并取得了丰硕的成果[18 ⁃ 22] 。 鱼类游动具有极高的推进效率,在研究鱼类的 运动学模型时,如何借鉴鱼类运动得到一种高效的 推进模式是十分有意义的。 文献[23] 提出了一种 将描述鱼体稳定游动的周期性运动和描述鱼体身体 形状改变的非周期性运动相分离的方法,来对鱼的 躯体运动进行运动学建模。 文献[24] 提出了多坐 标系转换的运动学模型,为基于波动鳍推进模式的 多鳍推进控制系统设计方案为水下机器人的仿生设 计提供了一个新的思路和选择,但仅能对理想的仿 鱼波动面进行运动描述。 一些学者对非鲹科鱼类进行研究,通过观察其 形态学特点,对运动学特性进行观测,并建立了相应 的运动学模型[25 ⁃ 27] 。 1.2 基于动力学模型的方法 由于鱼类在水中的游动涉及鱼体的运动学和复 杂的水动力学,在现有的水动力学基础上很难通过解 析的方法建立精确的数学模型,因此,现阶段仿生机 器鱼的运动控制皆建立在简化的水动力学模型之上。 对鱼类 游 动 时 的 水 动 力 学 研 究, 国 外 学 者 Wu [28] 、Lighthill [29 ⁃ 30]和 Videler [31]分别提出了“二维 波动板理论”、“大摆幅细长体理论”和“薄体理论”, 为仿生机器鱼的动力学研究奠定了基础。 20 世纪 80 年代中后期,中国科学技术大学的童秉纲和程建 宇博士采用半解析-半数值的方法,提出了三维波 动板理论,得到了国际上鱼类生物力学研究群体的 广泛运用和认同[32 ⁃ 33] 。 通过分析鱼体在纵向、横向和沉浮方向的力学 分析和计算,建立仿生机器鱼游动时的水动力学模 型,采用几何非线性方法、在线反馈跟踪或离线运动 规划等方法,对机器鱼的运动控制策略进行研究,仍 是主要的研究方法。 国内外在此方面的动力学建模 研究成果颇丰[34 ⁃ 44] 。 在水动力学理论的改进和优化方面,文献[45] 和文献[46] 通过运用改进了的“大振幅细长体理 论”和“二维波动板理论”,对仿生机器鱼的动力学 第 3 期 王耀威,等:仿生机器鱼运动控制方法综述 ·277·
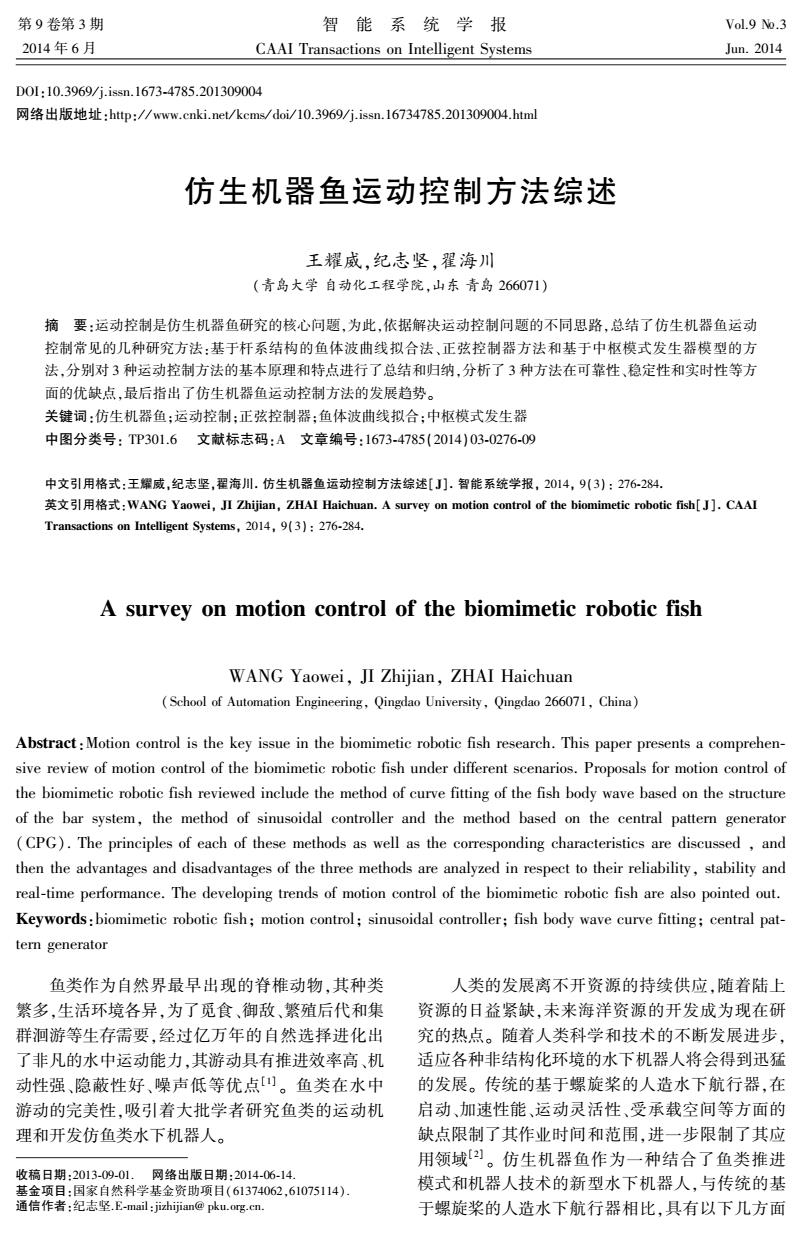
·278. 智能系统学报 第9卷 模型进行了分析研究。 4Y(背腹轴) 1.3仿神经元网络控制的方法 鱼体波曲线 基于仿神经元网络的仿生机器鱼控制方法,是 近年来新出现的一种运动控制方法,模仿动物的运 动控制机理,以中枢模式发生器(central pattern gen- erator,CPG)作为底层运动控制器,可以应用于机器 2pX(头尾轴) 人步态的产生。 瑞士的Ijspeert等一直致力于基于生物CPG原 理的运动控制方法研究,并成功地将CPG原理的运 动控制方法应用到了两栖蛇形机器人上[4)]。 图1基于杆系结构的鱼体波曲线拟合 Fig.1 Curve fitting of fish body wave based on 由于基于CPG的运动控制方法与传统的运动 the structure of bar system 控制方法相比,有着无可比拟的优越性,并且CPG 鲹科鱼类的鱼体波曲线可看作是鱼体波幅包络 模型并不统一,使得基于CPG的仿生机器鱼运动控 线和正弦曲线的合成,它开始于鱼体的惯性中心,延 制成为研究的热点之一,国内外许多学者在这方面 做了大量研究[8)」 伸至尾柄,其曲线方程可表示为[例 CPG模型一般都含有高度非线性的环节,这给 yhad,(x,t)=[(cx +c2x2)][sin(kx wt) 式中:y是鱼体的横向位移,x是鱼体的轴向位 CPG的理论和应用研究带来许多困难。在CPG模 移,c1是鱼体波波幅包络线的一次项系数,c2是鱼 型的改进和优化方面,文献[56]提出了一种进化优 体波波幅包络线的二次项系数,k是波长倍数 化的CPG结构,通过控制仿生机器鱼的关节摆角来 (k=2π/入),入是鱼体波的波长,ω是鱼体波频率 产生类似鱼类的游动,并用量子进化算法来优化产 (w=2f=2π/T)。 生类似鱼类游动的参数。为了克服开环CPG只在 基于杆系结构的鱼体波曲线拟合的运动学模型 参考信号作用时才能同步的局限性,文献[57]提出 比较简单,只要选择合适的参数集就能实现仿生机 了一种新的单层CPG方法,其中CPG和物理层合 器鱼游动步态的产生。但鱼体波曲线方程的表征范 并为一个单层,以确保在存在外部干扰的情况下物 围和曲线柔性较为有限,对不同种类、尺寸、外形的 理执行器的同步性,并成功地将该策略运用到仿生 仿生机器鱼具有不同的运动参数集,因此要优化仿 机器龟的控制上。为使CG的控制输出信号的参 生机器鱼的控制性能和游动效率比较困难。同时, 数达到最优,文献[58]提出了一种基于中枢模式发 由于曲线的柔性有限,使得曲线拟合法对参数突变 生器的粒子群算法,用以产生有节律的仿生机器鱼 的适应性方面较差。此外,鱼体波拟合需要大量的 运动控制信号。 迭代运算,拟合出的关节摆角需要存储于仿生机器 2仿生机器鱼的运动控制方法 鱼的内部存储器内,受存储容量的限制,仿生机器鱼 不可能具有无限多的游动步态,因此限制了仿生机 常见的仿生机器鱼运动控制方法有基于杆系结 器鱼游动的机动性和灵活性。 构的鱼体波曲线拟合法、简单的正弦控制器方法和 鱼体波曲线方程相应的优化和改进方案:针对波 基于中枢模式发生器的运动控制方法。下面就这3 动方程表征范围较为有限的缺点,在保留曲线方程特 种常见的运动控制方法的基本原理、优缺点等进行 征参数的同时,引入波长倍数k相对于x的二次增益 讨论。 项,从而可以实现更多的身体波曲线,增加仿生机器 2.1基于杆系结构的鱼体波曲线拟合控制方法 鱼运动的机动性和灵活性o。文献[61]通过构造惩 基于杆系结构的鱼体波曲线拟合方法从本质上 罚函数将有约束问题转化为无约束优化问题,实现机 说是一种基于运动学的方法。它将仿生机器鱼身体 器鱼多关节机构尺寸的参数优化,减小了仿生机器鱼 的摆动部分视为一个由铰链相连的多连杆机构,通 实际中心线与理论中心线之间的误差,最大限度地体 过调节鱼体的连杆机构在运动过程中的相对位置来 现了理想鱼体波曲线的水动力学优越性。 拟合鱼体波曲线[。基于杆系结构的鱼体波曲线 2.2正弦控制器运动控制方法 拟合如图1所示。拟合过程中保证每一摆动时刻每 正弦控制器运动控制方法[626]的基本原理是: 一连杆的端点都落在鱼体波理论曲线上即可,如图 使用简单的正弦控制器驱动仿生机器鱼的多个串联 1对应的关节角取为P1、P2、P3、P40 关节,通过使前面关节的相位超前于后面关节的相
模型进行了分析研究。 1.3 仿神经元网络控制的方法 基于仿神经元网络的仿生机器鱼控制方法,是 近年来新出现的一种运动控制方法,模仿动物的运 动控制机理,以中枢模式发生器(central pattern gen⁃ erator, CPG)作为底层运动控制器,可以应用于机器 人步态的产生。 瑞士的 Ijspeert 等一直致力于基于生物 CPG 原 理的运动控制方法研究,并成功地将 CPG 原理的运 动控制方法应用到了两栖蛇形机器人上[47] 。 由于基于 CPG 的运动控制方法与传统的运动 控制方法相比,有着无可比拟的优越性,并且 CPG 模型并不统一,使得基于 CPG 的仿生机器鱼运动控 制成为研究的热点之一,国内外许多学者在这方面 做了大量研究[48 ⁃ 55] 。 CPG 模型一般都含有高度非线性的环节,这给 CPG 的理论和应用研究带来许多困难。 在 CPG 模 型的改进和优化方面,文献[56]提出了一种进化优 化的 CPG 结构,通过控制仿生机器鱼的关节摆角来 产生类似鱼类的游动,并用量子进化算法来优化产 生类似鱼类游动的参数。 为了克服开环 CPG 只在 参考信号作用时才能同步的局限性,文献[57]提出 了一种新的单层 CPG 方法,其中 CPG 和物理层合 并为一个单层,以确保在存在外部干扰的情况下物 理执行器的同步性,并成功地将该策略运用到仿生 机器龟的控制上。 为使 CPG 的控制输出信号的参 数达到最优,文献[58]提出了一种基于中枢模式发 生器的粒子群算法,用以产生有节律的仿生机器鱼 运动控制信号。 2 仿生机器鱼的运动控制方法 常见的仿生机器鱼运动控制方法有基于杆系结 构的鱼体波曲线拟合法、简单的正弦控制器方法和 基于中枢模式发生器的运动控制方法。 下面就这 3 种常见的运动控制方法的基本原理、优缺点等进行 讨论。 2.1 基于杆系结构的鱼体波曲线拟合控制方法 基于杆系结构的鱼体波曲线拟合方法从本质上 说是一种基于运动学的方法。 它将仿生机器鱼身体 的摆动部分视为一个由铰链相连的多连杆机构,通 过调节鱼体的连杆机构在运动过程中的相对位置来 拟合鱼体波曲线[59] 。 基于杆系结构的鱼体波曲线 拟合如图 1 所示。 拟合过程中保证每一摆动时刻每 一连杆的端点都落在鱼体波理论曲线上即可,如图 1 对应的关节角取为 φ1 、 φ2 、 φ3 、 φ4 。 图 1 基于杆系结构的鱼体波曲线拟合 Fig.1 Curve fitting of fish body wave based on the structure of bar system 鲹科鱼类的鱼体波曲线可看作是鱼体波幅包络 线和正弦曲线的合成,它开始于鱼体的惯性中心,延 伸至尾柄,其曲线方程可表示为[59] ybody(x,t) = [(c1 x + c2 x 2 )][sin(kx + ωt)] 式中: ybody 是鱼体的横向位移,x 是鱼体的轴向位 移, c1 是鱼体波波幅包络线的一次项系数, c2 是鱼 体波波 幅 包 络 线 的 二 次 项 系 数, k 是 波 长 倍 数 (k =2π/ λ) , λ 是鱼体波的波长, ω 是鱼体波频率 (ω =2πf = 2π/ T) 。 基于杆系结构的鱼体波曲线拟合的运动学模型 比较简单,只要选择合适的参数集就能实现仿生机 器鱼游动步态的产生。 但鱼体波曲线方程的表征范 围和曲线柔性较为有限,对不同种类、尺寸、外形的 仿生机器鱼具有不同的运动参数集,因此要优化仿 生机器鱼的控制性能和游动效率比较困难。 同时, 由于曲线的柔性有限,使得曲线拟合法对参数突变 的适应性方面较差。 此外,鱼体波拟合需要大量的 迭代运算,拟合出的关节摆角需要存储于仿生机器 鱼的内部存储器内,受存储容量的限制,仿生机器鱼 不可能具有无限多的游动步态,因此限制了仿生机 器鱼游动的机动性和灵活性。 鱼体波曲线方程相应的优化和改进方案:针对波 动方程表征范围较为有限的缺点,在保留曲线方程特 征参数的同时,引入波长倍数 k 相对于 x 的二次增益 项,从而可以实现更多的身体波曲线,增加仿生机器 鱼运动的机动性和灵活性[60] 。 文献[61]通过构造惩 罚函数将有约束问题转化为无约束优化问题,实现机 器鱼多关节机构尺寸的参数优化,减小了仿生机器鱼 实际中心线与理论中心线之间的误差,最大限度地体 现了理想鱼体波曲线的水动力学优越性。 2.2 正弦控制器运动控制方法 正弦控制器运动控制方法[62 ⁃ 63] 的基本原理是: 使用简单的正弦控制器驱动仿生机器鱼的多个串联 关节,通过使前面关节的相位超前于后面关节的相 ·278· 智 能 系 统 学 报 第 9 卷
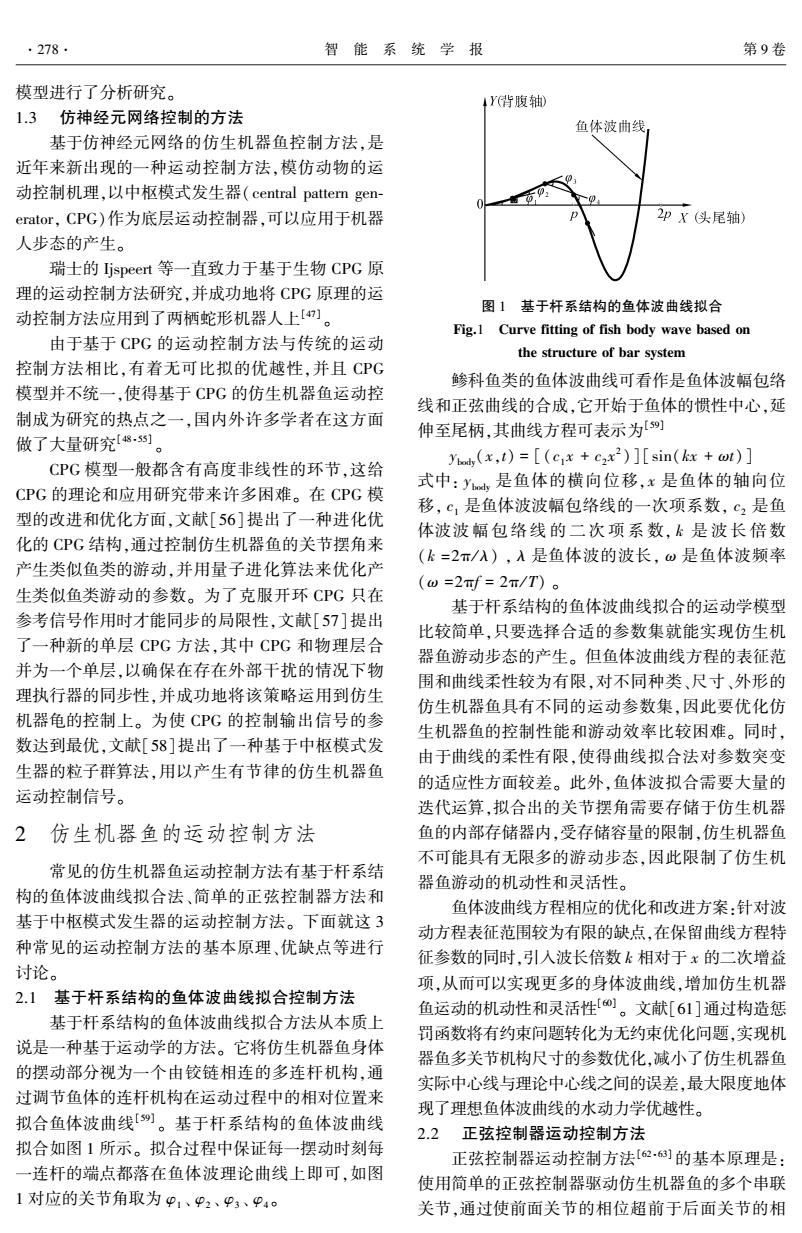
第3期 王耀威,等:仿生机器鱼运动控制方法综述 ·279· 位来产生推进行波。基于正弦控制器的运动控制方 的神经元模型,它同样包括兴奋和抑制2类神经元 法从本质上来说也是一种基于运动学的方法。用方 以及神经元之间的兴奋抑制连接。文献[67]通过 程可以表述为 对简单的正弦振荡器模型引入一个非线性函数项 p:(t)=Asin(2ri+ip)-ψ f(x,y)=wx-x/A(x2+y2)来稳定振荡器的能量,再 式中:P。为相邻关节间的相位滞后角,A为每个关 引入带连接权值的耦合项得到多关节耦合CPG模 节的最大角偏移量,业为角向偏移量。 型,通过调节连接权值产生关节间的相位差形成多 正弦控制器方法模型、控制思想简单,可以在线 关节协调运动。多关节CPG耦合模型如下: 产生仿生机器鱼的游动步态,通过对控制参数的修 0':=0-0 改可以产生多样化的游动步态。但显然采用正弦控 制器时频率和幅值的突变会引起摆角的突变,因此 Av:=A:ω(v:-0')-v,[()2+v]+ 无法实现平滑自然的速度调节。 A:∑(a,9+b,y) 文献[62]设计了由一系列连杆结构组成的仿 生鱼鳍,凭借一个特别设计的条带,使每个连杆能够 A,0:=A,w(v:+0')-0:'[(0,')2+v] 相对于相邻的连杆转动或滑动,通过正弦控制器控 式中:T表示时间步长,0:表示第个关节的期望摆 制连杆机构的摆动,用产生的正弦曲线来拟合鱼鳍 角,8表示迭加在第i个关节摆动的中心位置的偏 的波动,并将正弦波控制器方法成功地应用到了装 移量,a:和b:均为第i个关节和第j个关节之间的 有仿生波动鳍的浮力管的运动控制上。 连接权值(第j个关节对i个关节影响的权值)。对 2.3基于中枢模式发生器原理的运动控制方法 于尾部由3个关节组成的仿生机器鱼,其基于Ama 近年来,基于中枢模式发生器的方法越来越多地 ri-Hopfield神经元振荡器的CPG控制网络如图2。 被用于各种类型的机器人及运动模式上。CPG是一种 axba a3,b2 仿生方法,它是由中间神经元构成的局部振荡网络,通 过神经元之间的相互抑制实现自激振荡,产生具有稳 Joint2 Joint3 定相位互锁关系的多路(或单路)周期信号,控制肢体 1,01,0 12,02,0 43003,日 或躯体相关部位的节律运动6。CPG网络作为一种 aib1 a2s B2s 节律性运动控制机制,主要特点为[]: 图2三关节仿生机器鱼CPG控制网络 1)可以在缺乏高层命令和外部反馈的情况下 Fig.2 The CPG control network of three joint biomim- 自动产生稳定的节律信号,而反馈信号或高层命令 etic robotic fish 又可以对CPG的行为进行调节; 基于Amari-Hopfield神经元振荡器的CPG模型 2)在高层命令的调节下,通过相位锁定,可以产 通过采用最近相邻耦合关系,从而简化了系统的复 生多种稳定、自然的相位关系,实现不同的运动模式; 杂程度。模型中的参数意义明确且相对独立,使其 3)易于和输入信号或物理系统耦合,使节律行 易于调节。 为在整个系统中传导: 通过改变连接权值a:和b:可以调节各关节之 4)可对外界刺激产生反射,从而改变运动状 间摆动的超前滞后关系,形成稳定的鱼体波,根据鱼 态,具有很强的适应性和鲁棒性。 类游动的特点可以设定振幅、频率、摆动偏移量等参 这些特点非常适合于机器人的运动控制,因 数来产生合适的鱼体波。此外,文献[68]基于Am- 此,CPG常被作为机器人运动的底层控制器。鱼类 ari-Hopfield神经元振荡器构建了CPG控制模型,证 学研究证明,鱼类的鳍和身体的运动都是由其中枢 明了此模型具有稳定的极限环,并成功地将此CPG 神经系统的周期性活动所引起的,因此引入了CPG 模型应用于一种带胸鳍的仿生机器鱼控制上。 控制机制用于产生模块化机器鱼的游动步态。 2.3.2递归振荡器模型 2.3.1 Amari-Hopfield神经元振荡器的CPG模型 Matsuoka提出的神经振荡器模型[9]是机器人 基于Amari-Hopfield神经元的振荡器模型[6]是 领域使用最为广泛的递归振荡器模型,它是由日本 一类应用比较普遍、具有稳定极限环的CPG模型, 九州工业大学的Matsuoka教授融合半层振荡器概 它由兴奋和抑制2类神经元组成,神经元之间存在 念而构建的。 着兴奋性和抑制性连接。要产生类似鱼类的游动步 在没有传感器信息输入的情况下,Matsuoka神 态,可分别对仿生机器鱼的每个关节建立一个CPG 经振荡器模型只能产生对称的振荡输出,从而限制
位来产生推进行波。 基于正弦控制器的运动控制方 法从本质上来说也是一种基于运动学的方法。 用方 程可以表述为 φi(t) = Asin(2πft + iφlag) - ψ 式中: φlag 为相邻关节间的相位滞后角,A 为每个关 节的最大角偏移量, ψ 为角向偏移量。 正弦控制器方法模型、控制思想简单,可以在线 产生仿生机器鱼的游动步态,通过对控制参数的修 改可以产生多样化的游动步态。 但显然采用正弦控 制器时频率和幅值的突变会引起摆角的突变,因此 无法实现平滑自然的速度调节。 文献[62]设计了由一系列连杆结构组成的仿 生鱼鳍,凭借一个特别设计的条带,使每个连杆能够 相对于相邻的连杆转动或滑动,通过正弦控制器控 制连杆机构的摆动,用产生的正弦曲线来拟合鱼鳍 的波动,并将正弦波控制器方法成功地应用到了装 有仿生波动鳍的浮力管的运动控制上。 2.3 基于中枢模式发生器原理的运动控制方法 近年来,基于中枢模式发生器的方法越来越多地 被用于各种类型的机器人及运动模式上。 CPG 是一种 仿生方法,它是由中间神经元构成的局部振荡网络,通 过神经元之间的相互抑制实现自激振荡,产生具有稳 定相位互锁关系的多路(或单路)周期信号,控制肢体 或躯体相关部位的节律运动[64] 。 CPG 网络作为一种 节律性运动控制机制,主要特点为[65] : 1)可以在缺乏高层命令和外部反馈的情况下 自动产生稳定的节律信号,而反馈信号或高层命令 又可以对 CPG 的行为进行调节; 2)在高层命令的调节下,通过相位锁定,可以产 生多种稳定、自然的相位关系,实现不同的运动模式; 3)易于和输入信号或物理系统耦合,使节律行 为在整个系统中传导; 4)可对外界刺激产生反射,从而改变运动状 态,具有很强的适应性和鲁棒性。 这些特点非常适合于机器人的运动控制, 因 此,CPG 常被作为机器人运动的底层控制器。 鱼类 学研究证明,鱼类的鳍和身体的运动都是由其中枢 神经系统的周期性活动所引起的,因此引入了 CPG 控制机制用于产生模块化机器鱼的游动步态。 2.3.1 Amari⁃Hopfield 神经元振荡器的 CPG 模型 基于 Amari⁃Hopfield 神经元的振荡器模型[66]是 一类应用比较普遍、具有稳定极限环的 CPG 模型, 它由兴奋和抑制 2 类神经元组成,神经元之间存在 着兴奋性和抑制性连接。 要产生类似鱼类的游动步 态,可分别对仿生机器鱼的每个关节建立一个 CPG 的神经元模型,它同样包括兴奋和抑制 2 类神经元 以及神经元之间的兴奋抑制连接。 文献[67] 通过 对简单的正弦振荡器模型引入一个非线性函数项 f(x,y) = ωx - x / A(x 2 + y 2 ) 来稳定振荡器的能量,再 引入带连接权值的耦合项得到多关节耦合 CPG 模 型,通过调节连接权值产生关节间的相位差形成多 关节协调运动。 多关节 CPG 耦合模型如下: θ′i = θi - θ - i Ai υ · i = Aiω(υi - θi ′) - υi[( θ i )2 + υ 2 i ] + Ai∑ j (aij θj + bijυj) Ai θ · i = Aiω(υi + θi ′) - θi ′[(θi ′)2 + υ 2 i ] ì î í ï ï ïï ï ï ïï 式中:T 表示时间步长, θi 表示第 i 个关节的期望摆 角, θ - i 表示迭加在第 i 个关节摆动的中心位置的偏 移量, aij 和 bij 均为第 i 个关节和第 j 个关节之间的 连接权值(第 j 个关节对 i 个关节影响的权值)。 对 于尾部由 3 个关节组成的仿生机器鱼,其基于 Ama⁃ ri⁃Hopfield 神经元振荡器的 CPG 控制网络如图 2。 图 2 三关节仿生机器鱼 CPG 控制网络 Fig.2 The CPG control network of three joint biomim⁃ etic robotic fish 基于 Amari⁃Hopfield 神经元振荡器的 CPG 模型 通过采用最近相邻耦合关系,从而简化了系统的复 杂程度。 模型中的参数意义明确且相对独立,使其 易于调节。 通过改变连接权值 aij 和 bij 可以调节各关节之 间摆动的超前滞后关系,形成稳定的鱼体波,根据鱼 类游动的特点可以设定振幅、频率、摆动偏移量等参 数来产生合适的鱼体波。 此外,文献[68]基于 Am⁃ ari⁃Hopfield 神经元振荡器构建了 CPG 控制模型,证 明了此模型具有稳定的极限环,并成功地将此 CPG 模型应用于一种带胸鳍的仿生机器鱼控制上。 2.3.2 递归振荡器模型 Matsuoka 提出的神经振荡器模型[69] 是机器人 领域使用最为广泛的递归振荡器模型,它是由日本 九州工业大学的 Matsuoka 教授融合半层振荡器概 念而构建的。 在没有传感器信息输入的情况下,Matsuoka 神 经振荡器模型只能产生对称的振荡输出,从而限制 第 3 期 王耀威,等:仿生机器鱼运动控制方法综述 ·279·

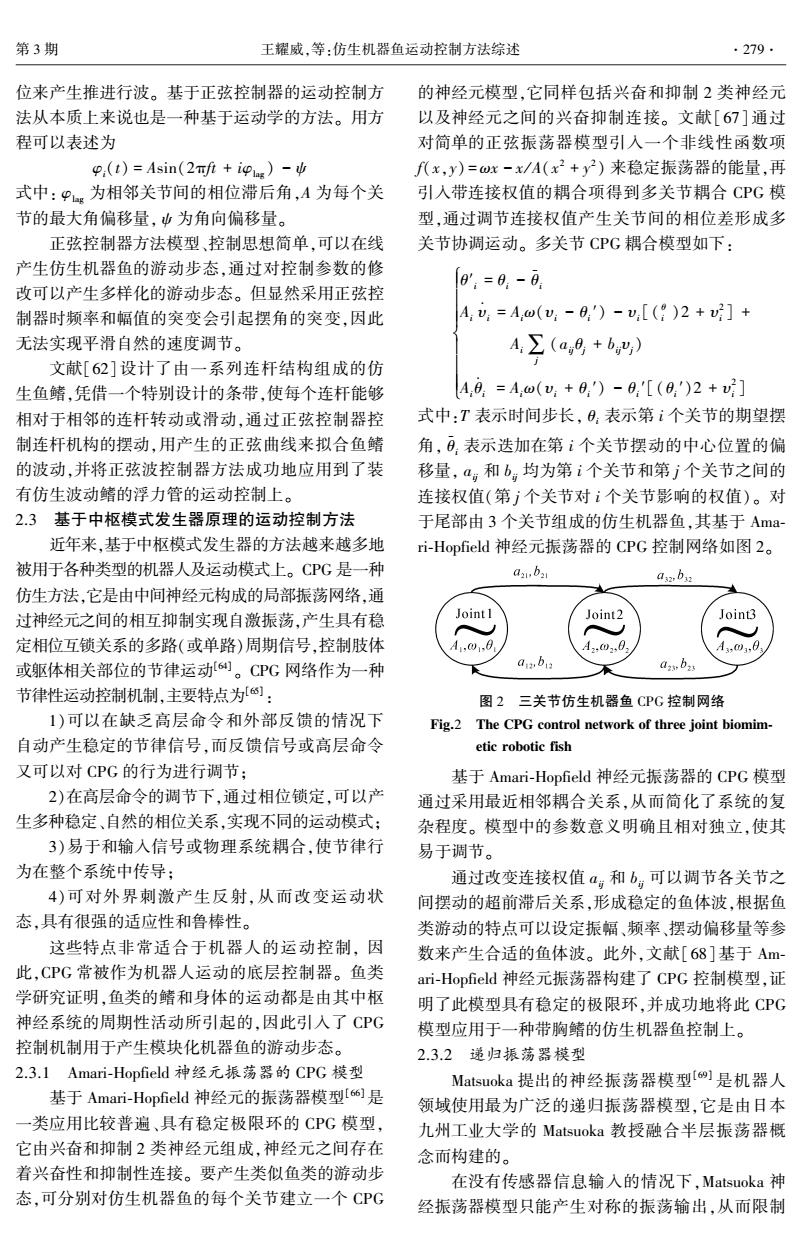
·280· 智能系统学报 第9卷 了其在机器人领域的应用。为了使振荡器产生不对 表示神经元疲劳(自抑制)程度;y和为神经元输 称输入,Kimurat]在Matsuoka振荡器模型的基础上 出:B代表自抑制对神经元内部状态的影响程度;α 进行了一定的改进,该振荡器模型采用2个相互抑 是伸肌神经元和屈肌神经元之间的连接权重;ω:表 制的神经元组成振荡器,分别对应于动物的屈肌和 示神经振荡器j对i的连接权重;Feed和Feed表 伸肌控制神经元,通过为屈肌神经元和伸肌神经元 示外部反馈输入;和u表示来自高层的激励输 提供不同高层输入方式,使振荡器产生不对称的输 入;y:为振荡器输出,可以作为关节角度或者力矩 出。因此可以用Kimura神经元振荡器模型来产生 控制信号 机器鱼的游动步态。Kimura神经元振荡器模型如 改进的Matsuoka神经元振荡器数学模型相对 图3所示。 简单,可以较好地表达出CPG的生物学特性。仿生 机器鱼的每个关节可由一个Kimura神经振荡器进 伸肌神经元T 行控制,振荡器的输出作为关节的目标角度,通过调 整神经振荡器之间的耦合关系和连接权重可协调多 ∑oy9 个关节的运动,从而产生类似鱼类的游动。文献 Feed," [53]设计了基于Kimura神经振荡器的CPG模型, 根据CPG模型参数与反馈输入之间的关系,设计了 机器鱼俯仰和转弯反馈控制方法,通过利用机器鱼 y.=max(u,0) 反馈的信息来自主调节CPG参数,达到控制胸鳍运 动模式的目的。文献[71]基于改进的Matsuoka振 荡器CPG模型,研究了用CPG模型来产生机器鱼 v=max(u,0) 的目标关节摆角,通过推进器的协调控制,实现机器 Feed/ 鱼多样化的游动步态。 ∑wwy 2.3.3相位振荡器模型 瑞士科学家Ijspeert在Cohen振荡器模型的基 础上,根据蝾螈运动过程中身体的波动特征,提出一 种新的用于机器人运动控制的CPG模型。该模型 屈肌神经元 是一个由耦合非线性振幅控制相位振荡器构成系 兴奋连接 统。Ijspeert模型不同于其他的CPG模型,它仅是 抑制连接 在抽象上对生物运动过程的模拟,Ijspeert模型的极 图3 Kimura神经振荡器模型 限环行为具有解析解,并且这个解能够清楚地表达 Fig.3 Kimura neural oscillator model 用来控制参数的振幅、频率和相位滞后等物理 可以用式(1)微分方程来描述Kimura神经振 量[n-)。Ijspeert振荡器模型可由如下方程组描述: 荡器的动态特性,它们皆具有稳定的极限环。,式 (1)的表达式如下: i=a,(a,/4(R-r)-i) 0:2T;+>wysin(0-0:-g) 4=u-4-Bt-a-Feed-∑4 x:=(1+cos0:) 4=-4-联-a-a-A0 式中:0:表示第i个振荡器的相位;:表示固有频 (1) 率;W,表示耦合权重;P:表示振荡器间的相位关 T=y-明 系;,:表示第i个振荡器的幅值;R,表示固有幅值; a:表示幅值收敛速度;x:表示第i个振荡器的输出。 T=为- Ijspeert成功地将此振荡器模型应用于仿生蝾螈机 y=max(u,) 器人上。 式中:T和T,为时间常数;和分别为第i个神 Ijspeert振荡器模型相比Cohen的相位振荡器 经振荡器的伸肌和屈肌神经元的内部状态:和 模型,其相位耦合关系明显,并且添加了输出函数, 状态变量较少、计算量小
了其在机器人领域的应用。 为了使振荡器产生不对 称输入,Kimura [70]在 Matsuoka 振荡器模型的基础上 进行了一定的改进,该振荡器模型采用 2 个相互抑 制的神经元组成振荡器,分别对应于动物的屈肌和 伸肌控制神经元,通过为屈肌神经元和伸肌神经元 提供不同高层输入方式,使振荡器产生不对称的输 出。 因此可以用 Kimura 神经元振荡器模型来产生 机器鱼的游动步态。 Kimura 神经元振荡器模型如 图 3 所示。 图 3 Kimura 神经振荡器模型 Fig.3 Kimura neural oscillator model 可以用式(1) 微分方程来描述 Kimura 神经振 荡器的动态特性,它们皆具有稳定的极限环。,式 (1)的表达式如下: Tu u · e i = u 0e i - u e i - βv e i - αy f i - Feed e i - ∑ n j = 1 ωij y e j Tu u · f i = u 0f i - u f i - βv f i - αy e i - Feed f i - ∑ n j = 1 ωij y f j Tv v · e i = y e i - v e i Tv v · f i = y f i - v f i y {e,f} i = max(u {e,f} i ,0) ì î í ï ï ï ï ï ï ï ï ï ï ï ï (1) 式中: Tu 和 Tv 为时间常数; u e i 和 u f i 分别为第 i 个神 经振荡器的伸肌和屈肌神经元的内部状态; v e i 和 v f i 表示神经元疲劳(自抑制)程度; y e i 和 y f i 为神经元输 出;β 代表自抑制对神经元内部状态的影响程度;α 是伸肌神经元和屈肌神经元之间的连接权重; ωij 表 示神经振荡器 j 对 i 的连接权重; Feed e i 和 Feed f i 表 示外部反馈输入; u 0e i 和 u 0f i 表示来自高层的激励输 入; yi 为振荡器输出,可以作为关节角度或者力矩 控制信号 改进的 Matsuoka 神经元振荡器数学模型相对 简单,可以较好地表达出 CPG 的生物学特性。 仿生 机器鱼的每个关节可由一个 Kimura 神经振荡器进 行控制,振荡器的输出作为关节的目标角度,通过调 整神经振荡器之间的耦合关系和连接权重可协调多 个关节的运动,从而产生类似鱼类的游动。 文献 [53]设计了基于 Kimura 神经振荡器的 CPG 模型, 根据 CPG 模型参数与反馈输入之间的关系,设计了 机器鱼俯仰和转弯反馈控制方法,通过利用机器鱼 反馈的信息来自主调节 CPG 参数,达到控制胸鳍运 动模式的目的。 文献[71] 基于改进的 Matsuoka 振 荡器 CPG 模型,研究了用 CPG 模型来产生机器鱼 的目标关节摆角,通过推进器的协调控制,实现机器 鱼多样化的游动步态。 2.3.3 相位振荡器模型 瑞士科学家 Ijspeert 在 Cohen 振荡器模型的基 础上,根据蝾螈运动过程中身体的波动特征,提出一 种新的用于机器人运动控制的 CPG 模型。 该模型 是一个由耦合非线性振幅控制相位振荡器构成系 统。 Ijspeert 模型不同于其他的 CPG 模型,它仅是 在抽象上对生物运动过程的模拟,Ijspeert 模型的极 限环行为具有解析解,并且这个解能够清楚地表达 用来控 制 参 数 的 振 幅、 频 率 和 相 位 滞 后 等 物 理 量[72 ⁃ 73] 。 Ijspeert 振荡器模型可由如下方程组描述: r ¨ i = ai(ai / 4(Ri - ri) - r · i) θ · i = 2πvi + ∑ j wij sin(θj - θi - φij) xi = ri(1 + cos θi) ì î í ï ï ï ï ïï 式中: θi 表示第 i 个振荡器的相位; vi 表示固有频 率; wij 表示耦合权重; φij 表示振荡器间的相位关 系; ri 表示第 i 个振荡器的幅值; Ri 表示固有幅值; ai 表示幅值收敛速度; xi 表示第 i 个振荡器的输出。 Ijspeert 成功地将此振荡器模型应用于仿生蝾螈机 器人上。 Ijspeert 振荡器模型相比 Cohen 的相位振荡器 模型,其相位耦合关系明显,并且添加了输出函数, 状态变量较少、计算量小。 ·280· 智 能 系 统 学 报 第 9 卷