d6动=(⑦×B):di G=广(⑤×B)d 电动势方向: 首先确定积分方向(正方向) 若>0,则ε方向与d方向一致 若ε<0,则ε方向与d方向相反 整个线圈L中所产生的动生电动势为 8=fo×B)M 商的内厨
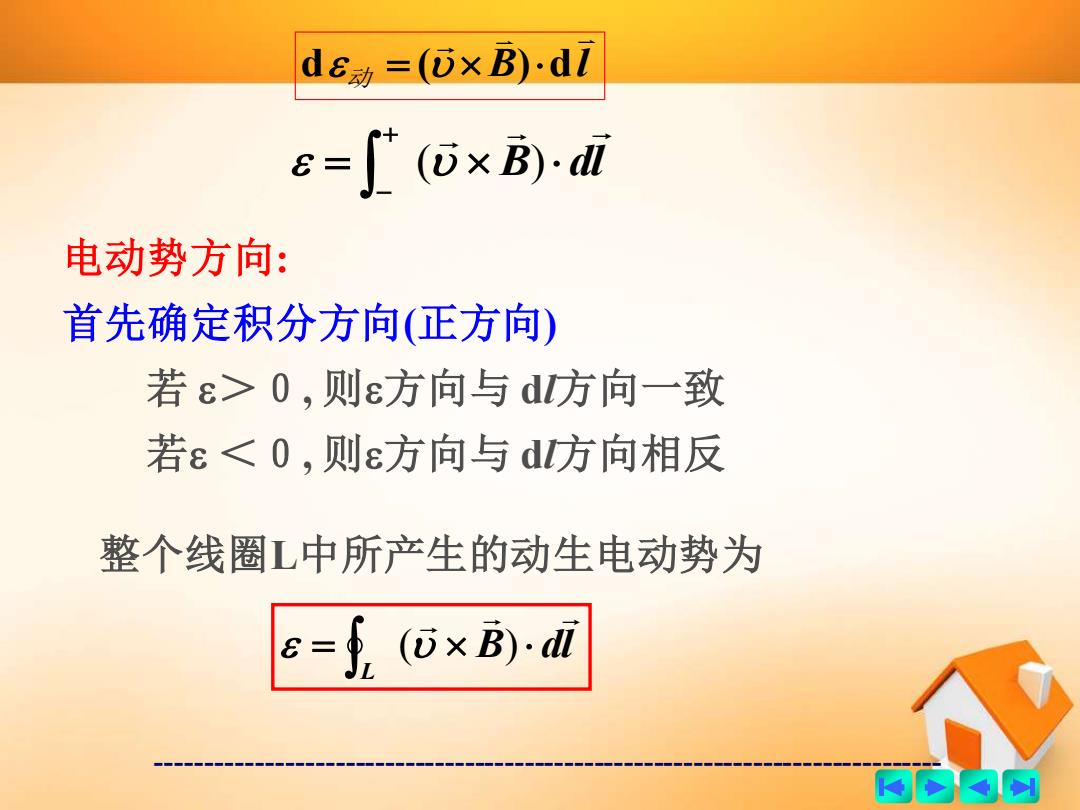
------------------------------------------------------------------------------- B l d 动 = ( )d B dl = + − ( ) 电动势方向: 首先确定积分方向(正方向) 若 >0, 则方向与 dl方向一致 若 <0, 则方向与 dl方向相反 整个线圈L中所产生的动生电动势为 B dl L = ( )
例:长度为L的铜棒在磁感应强度为B的均匀磁场中, 以角速度o绕0轴沿逆时针方向转动.求: (1)棒中感应电动势的大小和方向; (2)如果将铜棒换成半径为L的金属圆盘,求盘心与边 缘间的电势差。 解:方法一 × X × 取微元d,=(⑦×B)di dE;=-Bvdl =-Bladl e,=∫de,=-∫Blol X 8-16a2: × 2 电动势的方向:A→0 两的肉例
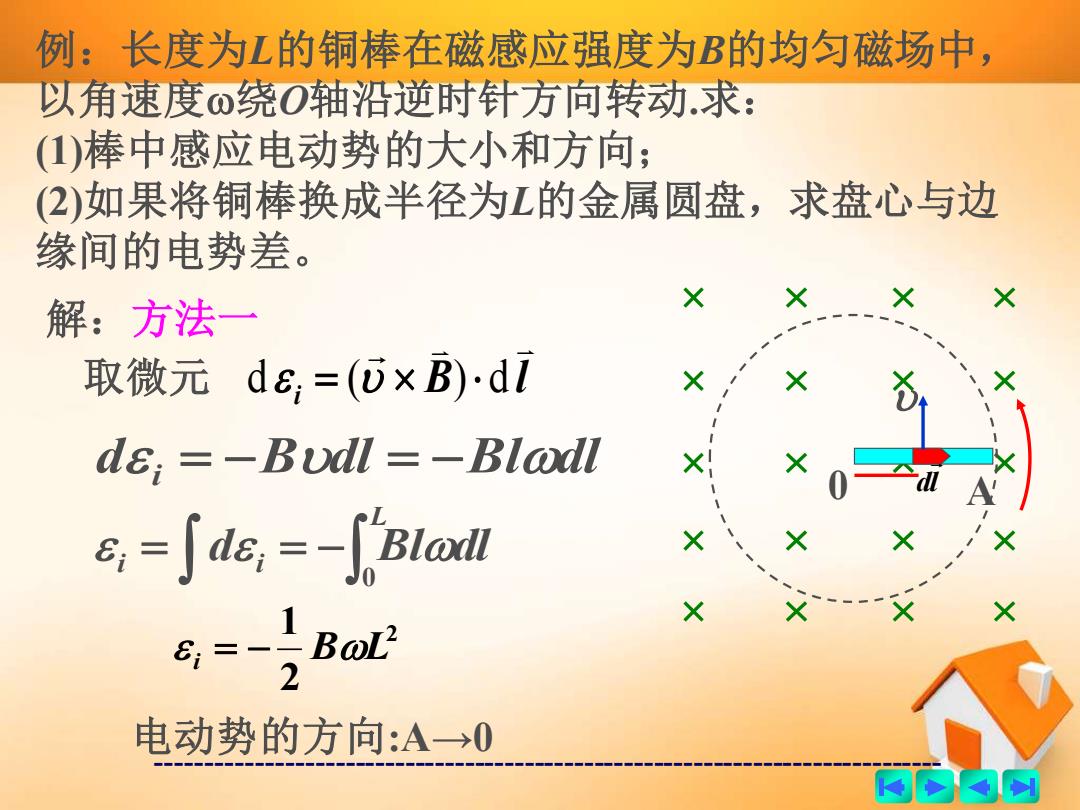
------------------------------------------------------------------------------- 例:长度为L的铜棒在磁感应强度为B的均匀磁场中, 以角速度绕O轴沿逆时针方向转动.求: (1)棒中感应电动势的大小和方向; (2)如果将铜棒换成半径为L的金属圆盘,求盘心与边 缘间的电势差。 0 A 解:方法一 取微元 dl B l i d = ( ) d d B dl Bl dl i = − = − = = − L i d i Bl dl 0 2 2 1 i = − BL 电动势的方向:A→0
方法二 作辅助线,形成闭合回路OACO × X Φm=∫B·&=∫BS S =BS 1 BOL × 2 dΦ 1 d0 X X BL dt 2 dt × x-----x × BoL 2 符号表示方向沿AOCA OC、CA段没有动生电动势 阿的内厨
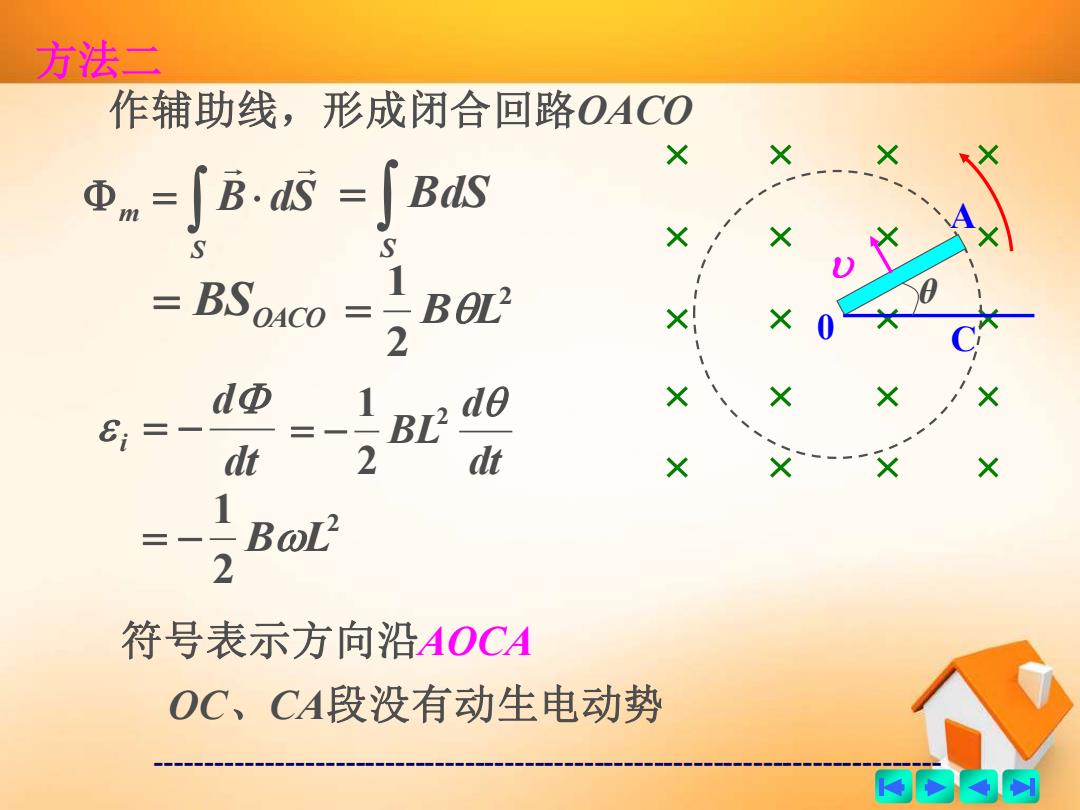
------------------------------------------------------------------------------- 方法二 作辅助线,形成闭合回路OACO 0 A C θ = S m B dS = S BdS = BSOACO 2 2 1 = BL dt d i = − dt d BL2 2 1 = − 2 2 1 = − BL 符号表示方向沿AOCA OC、CA段没有动生电动势

(2)将铜棒换成金属圆盘,可看作是由无数根并联的 金属棒0OA组合而成,故盘心O与边缘A之间的动生电 动势仍为 BoL 2 商的内网
------------------------------------------------------------------------------- (2) 将铜棒换成金属圆盘,可看作是由无数根并联的 金属棒OA组合而成,故盘心O与边缘A之间的动生电 动势仍为 2 2 1 i = − BL

二、感生电动势 由于磁场发生变化而激发的电动势 动生电动势非静电力洛仑兹力 电磁感应 感生电动势非静电力,? 实验表明,非静电力只能是磁场变化引起。 而这种非静电力能对静止电荷有作用 力,因此,应是一种与电场力类似的力。一 的
------------------------------------------------------------------------------- 二、感生电动势 由于磁场发生变化而激发的电动势 电磁感应 动生电动势 感生电动势 非静电力 洛仑兹力 非静电力 ? 实验表明,非静电力只能是磁场变化引起。 而这种非静电力能对静止电荷有作用 力,因此,应是一种与电场力类似的力