
哈尔滨工业大学工程硕士学位论文 态参数进行简化,设计出了基于SMA和ICPF联合驱动的仿水母机器人。该 水母机器人为头部直径32mm,整体长度55mm,重约2.7g的微型机器人, 通过驱动记忆合金来实现其运动,进行了驱动性能测试和推进实验。 图1-12哈尔滨工程大学研制的仿水母机器人“LM1”[] 中国科学院自动化研究所在2013年6月研制了基于多连杆机构的仿生 机器水母,如图1-13所示2。该机器水母重约2.1kg,直径17.4cm,高度20.4cm, 采用四个驱动舵机和一个重心调节舵机来实现多连杆机构的往复摆动和重心 调节,形成4个辅助触角来带动钟状外皮进行收缩扩张运动,从而实现机器 水母的喷射推进、转弯、浮潜等动作。 图1-13中国科学院自动化研究所研制的仿水母机器人2] 2013年12月中国科学院自动化研究所对其进行了改进,增加了滑板机 构,使水母机器人能够更有效的完成推进,推进速度最大可达80mm/s,转弯 速度最大可达9度/秒[20。 2014年1月,王振龙教授等研制了形状记忆合金丝驱动的触手推进式仿 生水母,如图1-14所示2)。该水母机器人利用智能材料一形状记忆合金丝 作为驱动材料,通过对水母进行仿生改造,研制了由六个仿生推进触角驱动 的仿生水母样机,其总长为230mm,直径110mm,总质量590g,自带能源 动力,直线游动速度能达到15mm/s的和转弯速度能达到18度/秒。 -8- 万方数据
哈尔滨工业大学工程硕士学位论文 态参数进行简化,设计出了基于 SMA 和 ICPF 联合驱动的仿水母机器人。该 水母机器人为头部直径 32mm,整体长度 55mm,重约 2.7g 的微型机器人, 通过驱动记忆合金来实现其运动,进行了驱动性能测试和推进实验。 图 1-12 哈尔滨工程大学研制的仿水母机器人“JLM1”[19] 中国科学院自动化研究所在 2013 年 6 月研制了基于多连杆机构的仿生 机器水母,如图 1-13所示[2] 。该机器水母重约 2.1kg,直径 17.4cm,高度 20.4cm, 采用四个驱动舵机和一个重心调节舵机来实现多连杆机构的往复摆动和重心 调节,形成 4 个辅助触角来带动钟状外皮进行收缩扩张运动,从而实现机器 水母的喷射推进、转弯、浮潜等动作。 图 1-13 中国科学院自动化研究所研制的仿水母机器人[2] 2013 年 12 月中国科学院自动化研究所对其进行了改进,增加了滑板机 构,使水母机器人能够更有效的完成推进,推进速度最大可达 80mm/s,转弯 速度最大可达 9 度/秒[20] 。 2014 年 1 月,王振龙教授等研制了形状记忆合金丝驱动的触手推进式仿 生水母,如图 1-14 所示[21] 。该水母机器人利用智能材料——形状记忆合金丝 作为驱动材料,通过对水母进行仿生改造,研制了由六个仿生推进触角驱动 的仿生水母样机,其总长为 230mm,直径 110mm,总质量 590g,自带能源 动力,直线游动速度能达到 15mm/s 的和转弯速度能达到 18 度/秒。 - 8 - 万方数据

哈尔滨工业大学工程硕士学位论文 图1-14哈尔滨工业大学研制的仿生水母机器人2] 1.2.3现有研究存在的不足 国内对仿生水母的研究还处于初步阶段,驱动方式主要是利用智能材料 一记忆合金的驱动,采用电机和机械结构驱动的设计较少,并且仿生水母钟 状体结构的收缩和舒张幅度较小,从而导致了推进速度小、消耗功率大等问 题,还需要进一步的研究。 国外对仿生机器水母的研究相对较多,但对仿生水母机器人的前期研究 也主要集中在记忆合金驱动上,2013年之后开始增加了电机驱动机械结构的 驱动方式。这种驱动方式还有待于继续深入研究。在水母的动力学理论上深 入研究还较少,需要进一步的理论分析。 而国内外对水母的研究主要还在微型仿水母机器人上,在中型和大型仿 生水母的研究上还比较少,仿生水母的理论基础还需要进一步探讨和研究。 1.3本课题主要研究内容 本课题的主要目的是对水母进行仿生学研究,通过参数化描述,分析水 母的运动机理,研究其运动特点及规律,并建立仿生水母的动力学模型,进 行动力学仿真,设计研制仿生水母机器人样机,并对机器水母进行了水下实 验和结果的对比和分析。通过实验期望得到运动参数可调、灵活性较强的仿 生机器水母,为仿生水母的动力学理论进行实验验证,同时为以后设计出更 高效率的水母奠定基础。 本论文将包括以下研究工作: (1)仿生机器水母运动机理及动力学分析 以霞水母为研究对象,对霞水母的运动机理进行分析,描述其基本运动 分析其运动规律和确定其主要推进方式。考虑水母的推进运动,建立水母钟 状体收缩和舒张的动力学模型,对其进行动力学分析,分析水母头部所受阻 力对水母运动的影响,分析水母推进减阻办法。 -9- 万方数据
哈尔滨工业大学工程硕士学位论文 图 1-14 哈尔滨工业大学研制的仿生水母机器人[21] 1.2.3 现有研究存在的不足 国内对仿生水母的研究还处于初步阶段,驱动方式主要是利用智能材料 —记忆合金的驱动,采用电机和机械结构驱动的设计较少,并且仿生水母钟 状体结构的收缩和舒张幅度较小,从而导致了推进速度小、消耗功率大等问 题,还需要进一步的研究。 国外对仿生机器水母的研究相对较多,但对仿生水母机器人的前期研究 也主要集中在记忆合金驱动上,2013 年之后开始增加了电机驱动机械结构的 驱动方式。这种驱动方式还有待于继续深入研究。在水母的动力学理论上深 入研究还较少,需要进一步的理论分析。 而国内外对水母的研究主要还在微型仿水母机器人上,在中型和大型仿 生水母的研究上还比较少,仿生水母的理论基础还需要进一步探讨和研究。 1.3 本课题主要研究内容 本课题的主要目的是对水母进行仿生学研究,通过参数化描述,分析水 母的运动机理,研究其运动特点及规律,并建立仿生水母的动力学模型,进 行动力学仿真,设计研制仿生水母机器人样机,并对机器水母进行了水下实 验和结果的对比和分析。通过实验期望得到运动参数可调、灵活性较强的仿 生机器水母,为仿生水母的动力学理论进行实验验证,同时为以后设计出更 高效率的水母奠定基础。 本论文将包括以下研究工作: (1) 仿生机器水母运动机理及动力学分析 以霞水母为研究对象,对霞水母的运动机理进行分析,描述其基本运动 分析其运动规律和确定其主要推进方式。考虑水母的推进运动,建立水母钟 状体收缩和舒张的动力学模型,对其进行动力学分析,分析水母头部所受阻 力对水母运动的影响,分析水母推进减阻办法。 - 9 - 万方数据
哈尔滨工业大学工程硕士学位论文 (2)仿生机器水母本体设计 在仿生学研究和动力学分析的基础上,设计和研制采用单电机驱动六个 辅助触角,从而带动水母的钟状体结构实现收缩和舒张运动的仿生机器水母 虚拟样机 (3)仿生机器水母动力学仿真 应用仿真软件ADAMS,对水母六只触角组成的钟状体结构进行模型简 化,进行动力学仿真,分析水母触角在各力作用下的摆动情况。 (4)仿生机器水母推进性能实验研究 设计控制系统,设计水母需要实现的基本运动,对仿生机器水母样机进 行调试、性能测试和水下推进性能实验,分析机器水母的水下运动情况,对 实验结果进行分析,获得实验数据。 -10- 万方数据
哈尔滨工业大学工程硕士学位论文 (2) 仿生机器水母本体设计 在仿生学研究和动力学分析的基础上,设计和研制采用单电机驱动六个 辅助触角,从而带动水母的钟状体结构实现收缩和舒张运动的仿生机器水母 虚拟样机 (3) 仿生机器水母动力学仿真 应用仿真软件 ADAMS,对水母六只触角组成的钟状体结构进行模型简 化,进行动力学仿真,分析水母触角在各力作用下的摆动情况。 (4) 仿生机器水母推进性能实验研究 设计控制系统,设计水母需要实现的基本运动,对仿生机器水母样机进 行调试、性能测试和水下推进性能实验,分析机器水母的水下运动情况,对 实验结果进行分析,获得实验数据。 - 10 - 万方数据
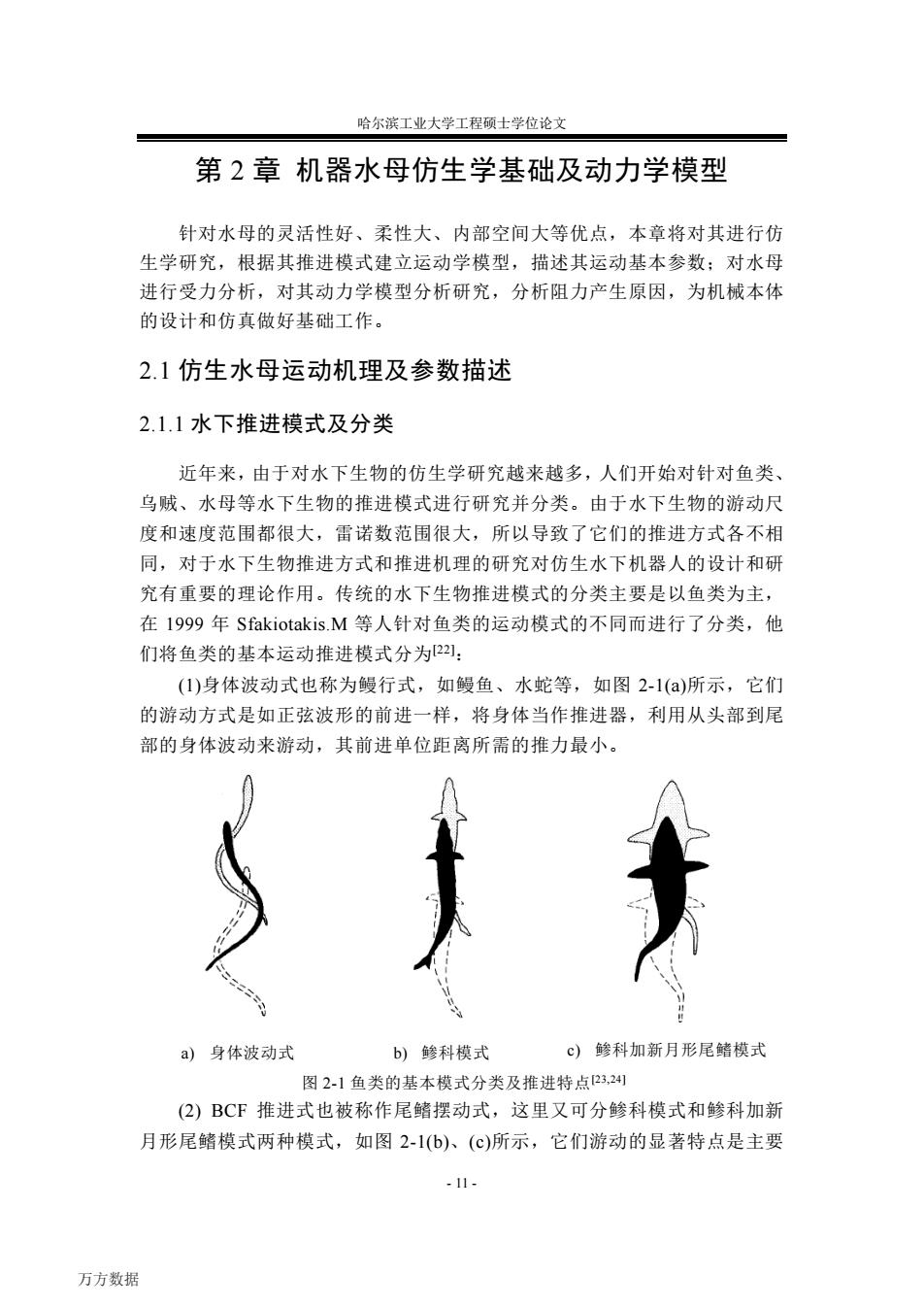
哈尔滨工业大学工程硕士学位论文 第2章机器水母仿生学基础及动力学模型 针对水母的灵活性好、柔性大、内部空间大等优点,本章将对其进行仿 生学研究,根据其推进模式建立运动学模型,描述其运动基本参数;对水母 进行受力分析,对其动力学模型分析研究,分析阻力产生原因,为机械本体 的设计和仿真做好基础工作。 2.1仿生水母运动机理及参数描述 2.1.1水下推进模式及分类 近年来,由于对水下生物的仿生学研究越来越多,人们开始对针对鱼类、 乌贼、水母等水下生物的推进模式进行研究并分类。由于水下生物的游动尺 度和速度范围都很大,雷诺数范围很大,所以导致了它们的推进方式各不相 同,对于水下生物推进方式和推进机理的研究对仿生水下机器人的设计和研 究有重要的理论作用。传统的水下生物推进模式的分类主要是以鱼类为主, 在1999年Sfakiotakis.M等人针对鱼类的运动模式的不同而进行了分类,他 们将鱼类的基本运动推进模式分为22]: (1)身体波动式也称为鳗行式,如鳗鱼、水蛇等,如图2-l()所示,它们 的游动方式是如正弦波形的前进一样,将身体当作推进器,利用从头部到尾 部的身体波动来游动,其前进单位距离所需的推力最小。 a)身体波动式 b)鲹科模式 c)鲹科加新月形尾鳍模式 图2-1鱼类的基本模式分类及推进特点23,24] (2)BC℉推进式也被称作尾鳍摆动式,这里又可分鲹科模式和鲹科加新 月形尾鳍模式两种模式,如图2-1(b)、(c)所示,它们游动的显著特点是主要 -11- 万方数据
哈尔滨工业大学工程硕士学位论文 第 2 章 机器水母仿生学基础及动力学模型 针对水母的灵活性好、柔性大、内部空间大等优点,本章将对其进行仿 生学研究,根据其推进模式建立运动学模型,描述其运动基本参数;对水母 进行受力分析,对其动力学模型分析研究,分析阻力产生原因,为机械本体 的设计和仿真做好基础工作。 2.1 仿生水母运动机理及参数描述 2.1.1 水下推进模式及分类 近年来,由于对水下生物的仿生学研究越来越多,人们开始对针对鱼类、 乌贼、水母等水下生物的推进模式进行研究并分类。由于水下生物的游动尺 度和速度范围都很大,雷诺数范围很大,所以导致了它们的推进方式各不相 同,对于水下生物推进方式和推进机理的研究对仿生水下机器人的设计和研 究有重要的理论作用。传统的水下生物推进模式的分类主要是以鱼类为主, 在 1999 年 Sfakiotakis.M 等人针对鱼类的运动模式的不同而进行了分类,他 们将鱼类的基本运动推进模式分为[22] : (1)身体波动式也称为鳗行式,如鳗鱼、水蛇等,如图 2-1(a)所示,它们 的游动方式是如正弦波形的前进一样,将身体当作推进器,利用从头部到尾 部的身体波动来游动,其前进单位距离所需的推力最小。 a) 身体波动式 b) 鲹科模式 c) 鲹科加新月形尾鳍模式 图 2-1 鱼类的基本模式分类及推进特点[23,24] (2) BCF 推进式也被称作尾鳍摆动式,这里又可分鲹科模式和鲹科加新 月形尾鳍模式两种模式,如图 2-1(b)、(c)所示,它们游动的显著特点是主要 - 11 - 万方数据

哈尔滨工业大学工程硕士学位论文 利用鱼的身体后半段和尾鳍的协调摆动来产生推进力23,24]: )鲹科模式,如鳟鱼、鲱鱼等,是一种最常见的方式,在速度和可操控 性上都较优于其他模式的鱼类。 2)鲹科加新月形尾鳍模式,如鲍鱼、鳍鱼、马林鱼等,常具有较大展弦 比的尾鳍,可以实现高速的摆动推进。 (3)MP℉推进式,这种推进模式主要是利用除了尾鳍之外的一些鱼鳍划 动来向前推进,如胸鳍、腹鳍、臀鳍、背鳍等。这类鱼较少,大多数的鱼类 只是通过这些鳍来保持平衡和控制转向25]。 人们对仿生水下机器人的研究越来越广泛,逐渐开始涉及到一些水下的 其他生物,传统的鱼类推进模式的分类难以满足新型的推进模式要求。所以, 在2012年韩国的Won-Shik Chu等人针对仿生机器人领域按驱动方式的不同 对水下推进模式进行了重新的分类。他们将水下生物按驱动方式分为五种推 进模式,如图2-2所示,根据鱼类的推进模式分类,针对仿生水下机器人, 可以将其分为身体/尾鳍驱动模式(BCA)和中间/对鳍驱动模式(MPA),再对其 细化分类,分为摆动式和波动式推进,加上研究逐渐增多的喷射推进模式[26]。 摆动式(BCA-O) 身体/尾鳍驱 动模式 (BCA) 波动式(BCA-U) 摆动式(MPA-O) 仿生水下机器 中间/对鳍驱 人推进模式 动模式 (MPA) 波动式(MPA-U) 喷射推进模 式 喷射推进模式 (JET) 图2-2仿生水下机器人推进模式 利用喷射推进模式的生物主要有乌贼、鱿鱼、水母、樽海鞘等,它们依 靠自身身体躯干的组织结构,它们是通过身体内部的特殊部位向后挤压水流 -12- 万方数据
哈尔滨工业大学工程硕士学位论文 利用鱼的身体后半段和尾鳍的协调摆动来产生推进力[23,24] : 1)鲹科模式,如鳟鱼、鲱鱼等,是一种最常见的方式,在速度和可操控 性上都较优于其他模式的鱼类。 2)鲹科加新月形尾鳍模式,如鲍鱼、鳍鱼、马林鱼等,常具有较大展弦 比的尾鳍,可以实现高速的摆动推进。 (3) MPF 推进式,这种推进模式主要是利用除了尾鳍之外的一些鱼鳍划 动来向前推进,如胸鳍、腹鳍、臀鳍、背鳍等。这类鱼较少,大多数的鱼类 只是通过这些鳍来保持平衡和控制转向[25] 。 人们对仿生水下机器人的研究越来越广泛,逐渐开始涉及到一些水下的 其他生物,传统的鱼类推进模式的分类难以满足新型的推进模式要求。所以, 在 2012 年韩国的 Won-Shik Chu 等人针对仿生机器人领域按驱动方式的不同 对水下推进模式进行了重新的分类。他们将水下生物按驱动方式分为五种推 进模式,如图 2-2 所示,根据鱼类的推进模式分类,针对仿生水下机器人, 可以将其分为身体/尾鳍驱动模式(BCA)和中间/对鳍驱动模式(MPA),再对其 细化分类,分为摆动式和波动式推进,加上研究逐渐增多的喷射推进模式[26] 。 身体/尾鳍驱 动模式 (BCA) 中间/对鳍驱 动模式 (MPA) 喷射推进模 式 (JET) 摆动式(BCA-O) 波动式(BCA-U) 摆动式(MPA-O) 波动式(MPA-U) 喷射推进模式 仿生水下机器 人推进模式 图 2-2 仿生水下机器人推进模式 利用喷射推进模式的生物主要有乌贼、鱿鱼、水母、樽海鞘等,它们依 靠自身身体躯干的组织结构,它们是通过身体内部的特殊部位向后挤压水流 - 12 - 万方数据