哈尔滨工业大学工程硕士学位论文 同时可以抵抗较大的水压,加速能力很强,可以瞬间提升到较高的速度8]。 在1998年,MIT研制出了RoboPike的最高版VCUUV,它是以黄鳍金 枪鱼为仿生模型,重量为300磅,长度为8英尺,它可以在水中自由的游动, 可以有效的减少阻力,机动性和稳定性都很高,在加速能力方面有了更大的 提升,如图1-2所示为机器鱼VCUUVI。 图1-2最高版机器鱼VCUUVIS9例 日本在仿生机器鱼的研究方面也比较多,在1998年,日本国家海洋研 究中心开始对水下仿生机器鱼进行研究,制作出不同类型的机器鱼样机,来 研究鱼类的游动1.1999年运输省船舶技术研究所投入了仿生机器鱼的项目 研究工作,研制了机器鱼P℉-550山,该机器鱼可以快速的实现升潜动作。 近年来,人们逐渐开始以水母为仿生研究对象,开始研究这种以喷射推 进为主要运动方式的运动模型。国外对水母的研究以美国为主,美国的弗吉 利亚理工学院研制出了不同类型的仿生水母机器人,从智能材料到机械结构, 很好地模仿了水母的运动,将来会用于水下侦查和监测。德国、意大利和韩 国也开始加入了仿生水母机器人的研制,分别研制出了机器水母样机。 在2008年德国的费斯托公司研制了一种由气缸驱动的仿生机器水母, 该水母通过气缸带动八个触角摆动来实现推进,如图1-3所示2)。 图1-3德国费斯托公司研制的机器水母 美国弗吉利亚理工学院的Bressers等人在2010年研制了仿生水母机器人 “JetSum”,如图1-4所示3]。该机器人是以形状记忆合金为推进机构,通 3 万方数据
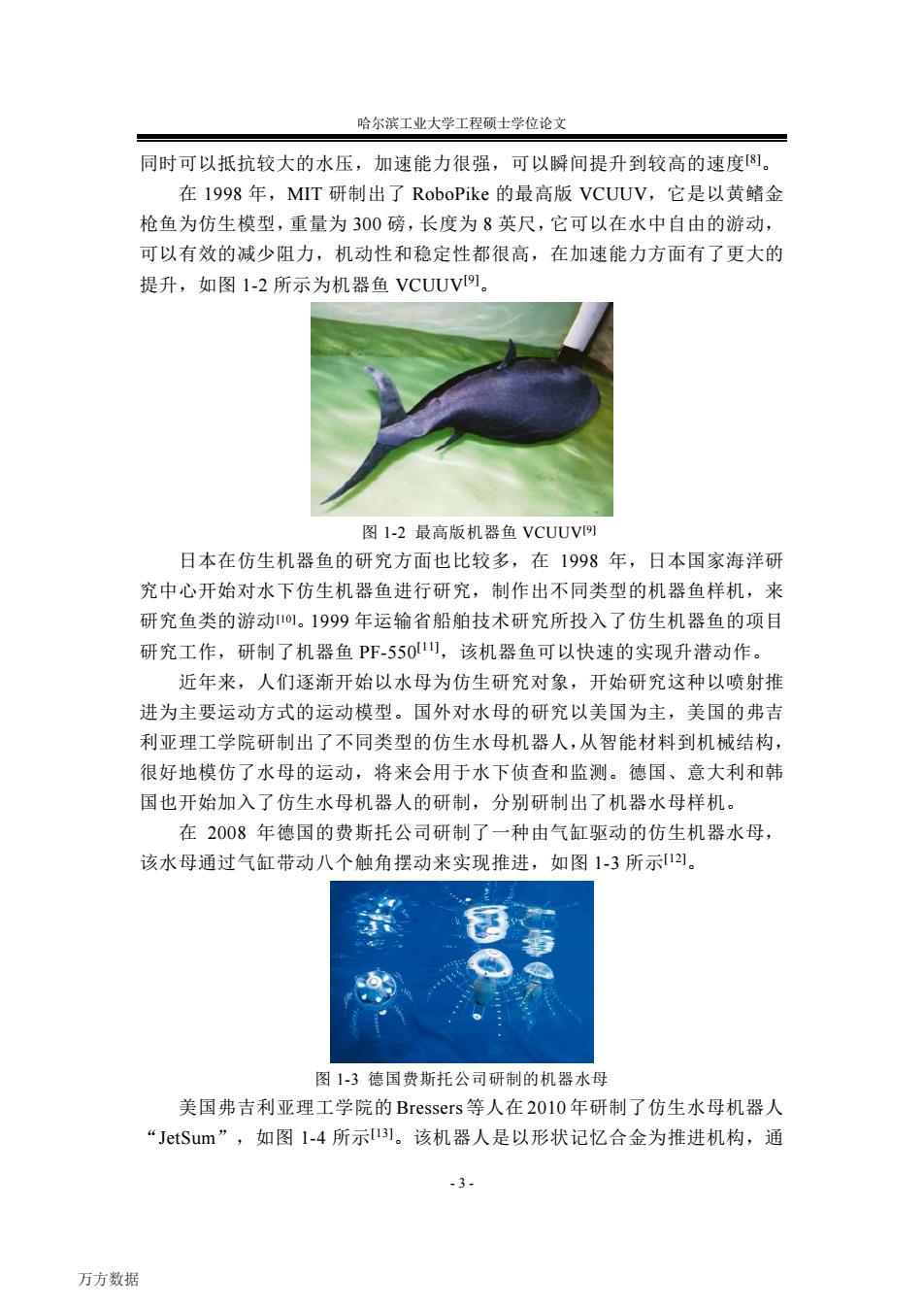
哈尔滨工业大学工程硕士学位论文 同时可以抵抗较大的水压,加速能力很强,可以瞬间提升到较高的速度[8] 。 在 1998 年,MIT 研制出了 RoboPike 的最高版 VCUUV,它是以黄鳍金 枪鱼为仿生模型,重量为 300 磅,长度为 8 英尺,它可以在水中自由的游动, 可以有效的减少阻力,机动性和稳定性都很高,在加速能力方面有了更大的 提升,如图 1-2 所示为机器鱼 VCUUV[9] 。 图 1-2 最高版机器鱼 VCUUV[9] 日本在仿生机器鱼的研究方面也比较多,在 1998 年,日本国家海洋研 究中心开始对水下仿生机器鱼进行研究,制作出不同类型的机器鱼样机,来 研究鱼类的游动[10] 。1999 年运输省船舶技术研究所投入了仿生机器鱼的项目 研究工作,研制了机器鱼 PF-550[11] ,该机器鱼可以快速的实现升潜动作。 近年来,人们逐渐开始以水母为仿生研究对象,开始研究这种以喷射推 进为主要运动方式的运动模型。国外对水母的研究以美国为主,美国的弗吉 利亚理工学院研制出了不同类型的仿生水母机器人,从智能材料到机械结构, 很好地模仿了水母的运动,将来会用于水下侦查和监测。德国、意大利和韩 国也开始加入了仿生水母机器人的研制,分别研制出了机器水母样机。 在 2008 年德国的费斯托公司研制了一种由气缸驱动的仿生机器水母, 该水母通过气缸带动八个触角摆动来实现推进,如图 1-3 所示[12] 。 图 1-3 德国费斯托公司研制的机器水母 美国弗吉利亚理工学院的 Bressers 等人在 2010 年研制了仿生水母机器人 “JetSum”,如图 1-4 所示[13] 。该机器人是以形状记忆合金为推进机构,通 - 3 - 万方数据
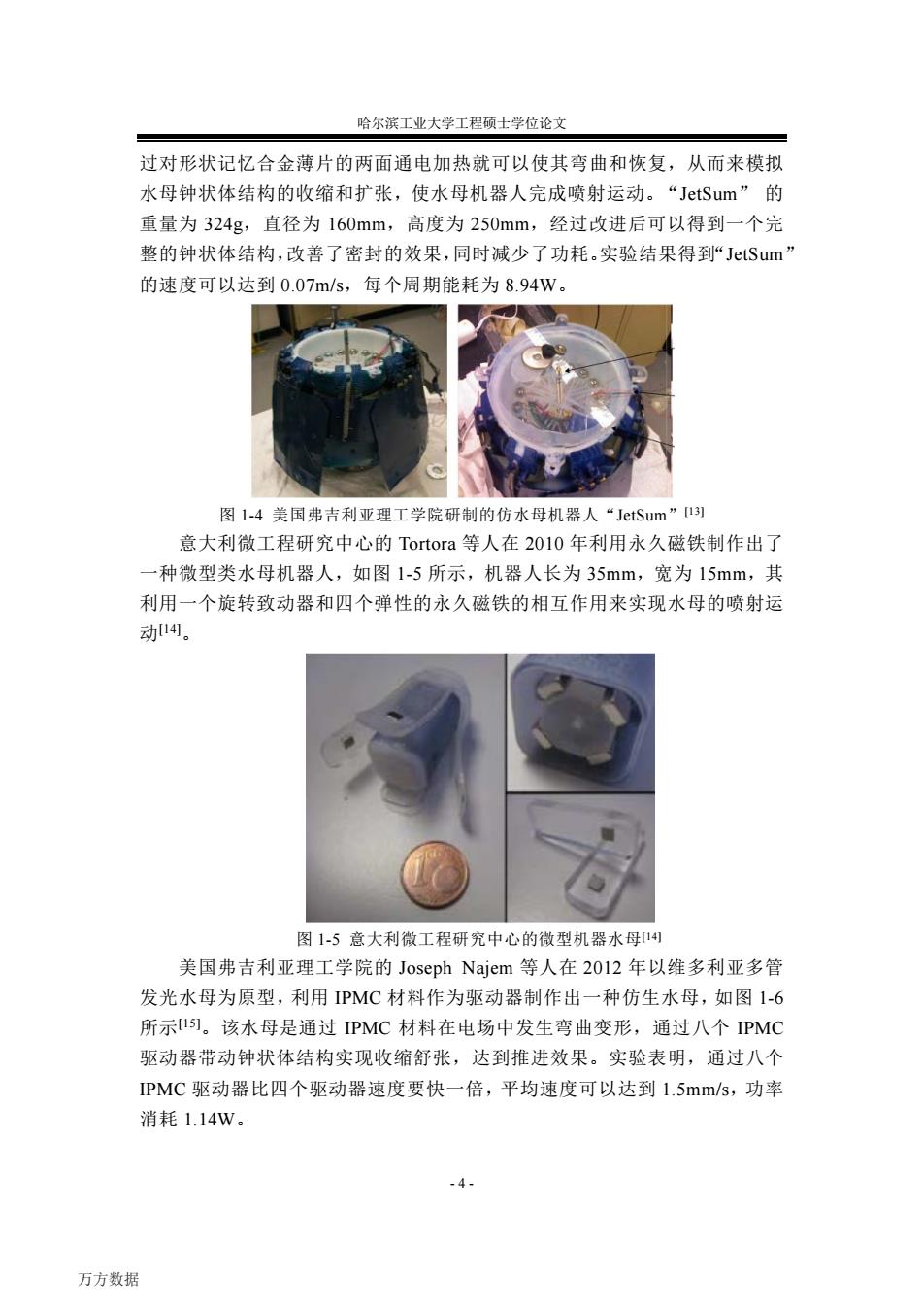
哈尔滨工业大学工程硕士学位论文 过对形状记忆合金薄片的两面通电加热就可以使其弯曲和恢复,从而来模拟 水母钟状体结构的收缩和扩张,使水母机器人完成喷射运动。“JetSum”的 重量为324g,直径为160mm,高度为250mm,经过改进后可以得到一个完 整的钟状体结构,改善了密封的效果,同时减少了功耗。实验结果得到“JetSum” 的速度可以达到0.07m/s,每个周期能耗为8.94W。 图1-4美国弗吉利亚理工学院研制的仿水母机器人“JetSum”3] 意大利微工程研究中心的Tortora等人在2010年利用永久磁铁制作出了 一种微型类水母机器人,如图1-5所示,机器人长为35mm,宽为15mm,其 利用一个旋转致动器和四个弹性的永久磁铁的相互作用来实现水母的喷射运 动14。 图1-5意大利微工程研究中心的微型机器水母4, 美国弗吉利亚理工学院的Joseph Najem等人在20l2年以维多利亚多管 发光水母为原型,利用IPMC材料作为驱动器制作出一种仿生水母,如图1-6 所示]。该水母是通过PMC材料在电场中发生弯曲变形,通过八个IPMC 驱动器带动钟状体结构实现收缩舒张,达到推进效果。实验表明,通过八个 PMC驱动器比四个驱动器速度要快一倍,平均速度可以达到1.5mm/s,功率 消耗1.14W。 -4 万方数据
哈尔滨工业大学工程硕士学位论文 过对形状记忆合金薄片的两面通电加热就可以使其弯曲和恢复,从而来模拟 水母钟状体结构的收缩和扩张,使水母机器人完成喷射运动。“JetSum” 的 重量为 324g,直径为 160mm,高度为 250mm,经过改进后可以得到一个完 整的钟状体结构,改善了密封的效果,同时减少了功耗。实验结果得到“JetSum” 的速度可以达到 0.07m/s,每个周期能耗为 8.94W。 图 1-4 美国弗吉利亚理工学院研制的仿水母机器人“JetSum”[13] 意大利微工程研究中心的 Tortora 等人在 2010 年利用永久磁铁制作出了 一种微型类水母机器人,如图 1-5 所示,机器人长为 35mm,宽为 15mm,其 利用一个旋转致动器和四个弹性的永久磁铁的相互作用来实现水母的喷射运 动[14] 。 图 1-5 意大利微工程研究中心的微型机器水母[14] 美国弗吉利亚理工学院的 Joseph Najem 等人在 2012 年以维多利亚多管 发光水母为原型,利用 IPMC 材料作为驱动器制作出一种仿生水母,如图 1-6 所示[15] 。该水母是通过 IPMC 材料在电场中发生弯曲变形,通过八个 IPMC 驱动器带动钟状体结构实现收缩舒张,达到推进效果。实验表明,通过八个 IPMC 驱动器比四个驱动器速度要快一倍,平均速度可以达到 1.5mm/s,功率 消耗 1.14W。 - 4 - 万方数据
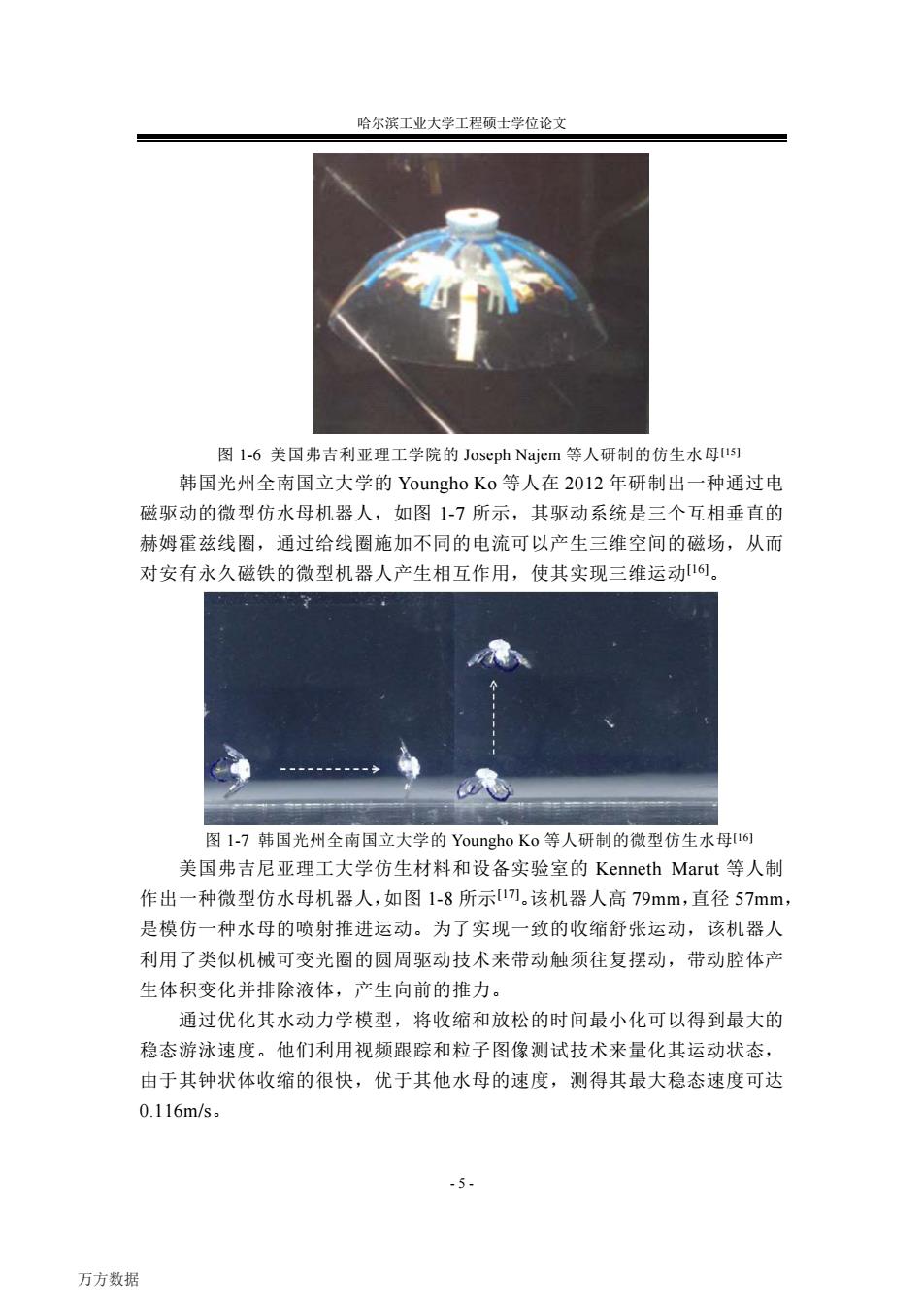
哈尔滨工业大学工程硕士学位论文 图l-6美国弗吉利亚理工学院的Joseph Najem等人研制的仿生水母ls] 韩国光州全南国立大学的Youngho Ko等人在2012年研制出一种通过电 磁驱动的微型仿水母机器人,如图1-7所示,其驱动系统是三个互相垂直的 赫姆霍兹线圈,通过给线圈施加不同的电流可以产生三维空间的磁场,从而 对安有永久磁铁的微型机器人产生相互作用,使其实现三维运动1。 图1-7韩国光州全南国立大学的Youngho Ko等人研制的微型仿生水母16 美国弗吉尼亚理工大学仿生材料和设备实验室的Kenneth Marut等人制 作出一种微型仿水母机器人,如图1-8所示17刀.该机器人高79mm,直径57mm, 是模仿一种水母的喷射推进运动。为了实现一致的收缩舒张运动,该机器人 利用了类似机械可变光圈的圆周驱动技术来带动触须往复摆动,带动腔体产 生体积变化并排除液体,产生向前的推力。 通过优化其水动力学模型,将收缩和放松的时间最小化可以得到最大的 稳态游泳速度。他们利用视频跟踪和粒子图像测试技术来量化其运动状态, 由于其钟状体收缩的很快,优于其他水母的速度,测得其最大稳态速度可达 0.116m/s。 -5- 万方数据
哈尔滨工业大学工程硕士学位论文 图 1-6 美国弗吉利亚理工学院的 Joseph Najem 等人研制的仿生水母[15] 韩国光州全南国立大学的 Youngho Ko 等人在 2012 年研制出一种通过电 磁驱动的微型仿水母机器人,如图 1-7 所示,其驱动系统是三个互相垂直的 赫姆霍兹线圈,通过给线圈施加不同的电流可以产生三维空间的磁场,从而 对安有永久磁铁的微型机器人产生相互作用,使其实现三维运动[16] 。 图 1-7 韩国光州全南国立大学的 Youngho Ko 等人研制的微型仿生水母[16] 美国弗吉尼亚理工大学仿生材料和设备实验室的 Kenneth Marut 等人制 作出一种微型仿水母机器人,如图 1-8 所示[17] 。该机器人高 79mm,直径 57mm, 是模仿一种水母的喷射推进运动。为了实现一致的收缩舒张运动,该机器人 利用了类似机械可变光圈的圆周驱动技术来带动触须往复摆动,带动腔体产 生体积变化并排除液体,产生向前的推力。 通过优化其水动力学模型,将收缩和放松的时间最小化可以得到最大的 稳态游泳速度。他们利用视频跟踪和粒子图像测试技术来量化其运动状态, 由于其钟状体收缩的很快,优于其他水母的速度,测得其最大稳态速度可达 0.116m/s。 - 5 - 万方数据
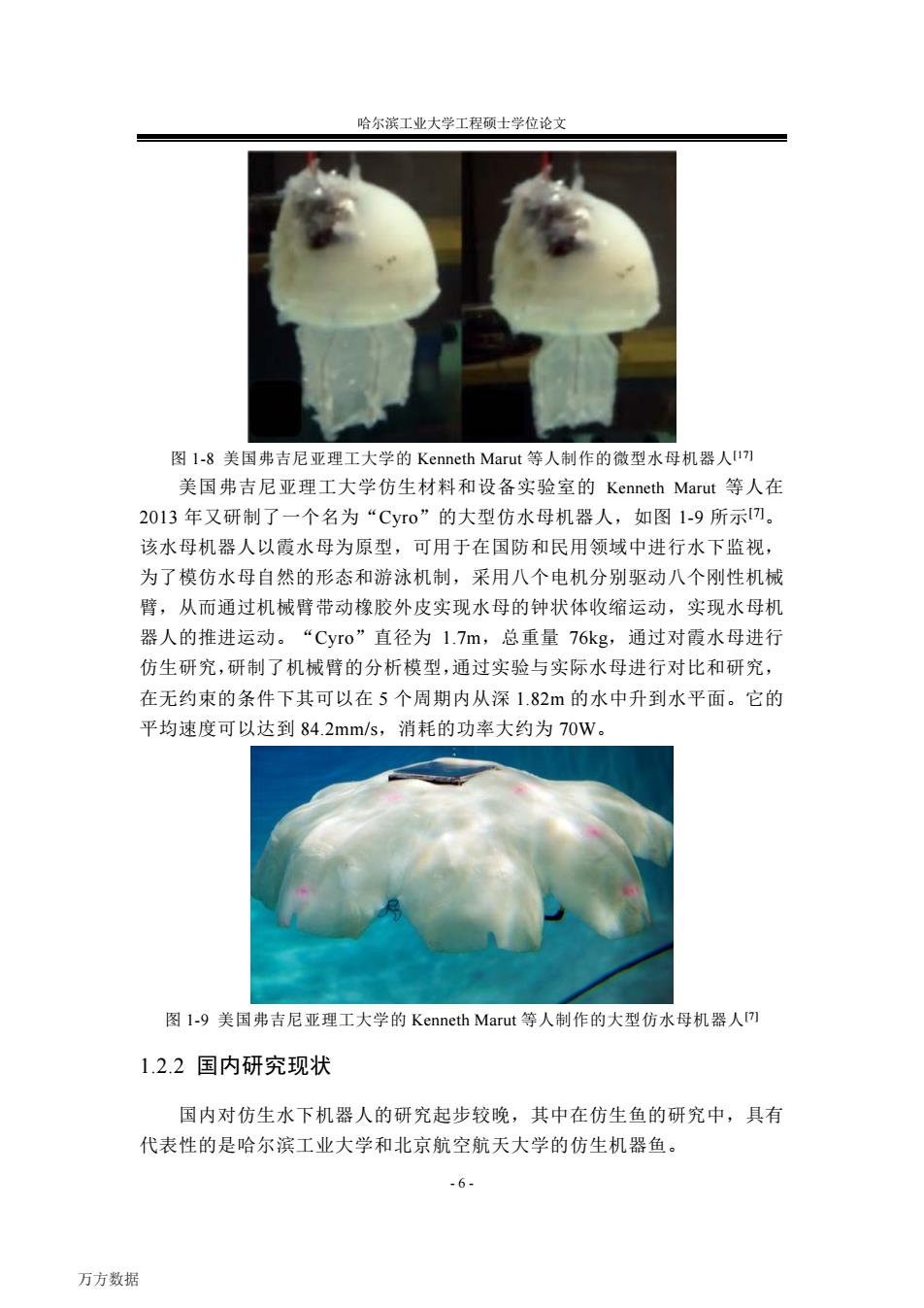
哈尔滨工业大学工程硕士学位论文 图l-8美国弗吉尼亚理工大学的Kenneth Marut等人制作的微型水母机器人u7] 美国弗吉尼亚理工大学仿生材料和设备实验室的Kenneth Marut等人在 2013年又研制了一个名为“Cyro”的大型仿水母机器人,如图1-9所示。 该水母机器人以霞水母为原型,可用于在国防和民用领域中进行水下监视, 为了模仿水母自然的形态和游泳机制,采用八个电机分别驱动八个刚性机械 臂,从而通过机械臂带动橡胶外皮实现水母的钟状体收缩运动,实现水母机 器人的推进运动。“Cyro”直径为1.7m,总重量76kg,通过对霞水母进行 仿生研究,研制了机械臂的分析模型,通过实验与实际水母进行对比和研究, 在无约束的条件下其可以在5个周期内从深1.82m的水中升到水平面。它的 平均速度可以达到84.2mm/s,消耗的功率大约为70W。 图l-9美国弗吉尼亚理工大学的Kenneth Marut等人制作的大型仿水母机器人[) 1.2.2国内研究现状 国内对仿生水下机器人的研究起步较晚,其中在仿生鱼的研究中,具有 代表性的是哈尔滨工业大学和北京航空航天大学的仿生机器鱼。 -6- 万方数据
哈尔滨工业大学工程硕士学位论文 图 1-8 美国弗吉尼亚理工大学的 Kenneth Marut 等人制作的微型水母机器人[17] 美国弗吉尼亚理工大学仿生材料和设备实验室的 Kenneth Marut 等人在 2013 年又研制了一个名为“Cyro”的大型仿水母机器人,如图 1-9 所示[7] 。 该水母机器人以霞水母为原型,可用于在国防和民用领域中进行水下监视, 为了模仿水母自然的形态和游泳机制,采用八个电机分别驱动八个刚性机械 臂,从而通过机械臂带动橡胶外皮实现水母的钟状体收缩运动,实现水母机 器人的推进运动。“Cyro”直径为 1.7m,总重量 76kg,通过对霞水母进行 仿生研究,研制了机械臂的分析模型,通过实验与实际水母进行对比和研究, 在无约束的条件下其可以在 5 个周期内从深 1.82m 的水中升到水平面。它的 平均速度可以达到 84.2mm/s,消耗的功率大约为 70W。 图 1-9 美国弗吉尼亚理工大学的 Kenneth Marut 等人制作的大型仿水母机器人[7] 1.2.2 国内研究现状 国内对仿生水下机器人的研究起步较晚,其中在仿生鱼的研究中,具有 代表性的是哈尔滨工业大学和北京航空航天大学的仿生机器鱼。 - 6 - 万方数据

哈尔滨工业大学工程硕士学位论文 哈尔滨工业大学的陈维山课题组研制了两代仿生机器鱼样机。在2006 年他们研制出了仿生机器鱼“HRF-I”,如图1-10()所示,该样机采用了单 电机驱动两关节尾鳍的推进方式,同时设置了胸鳍来实现上浮和下潜动作, 游动速度可达0.5m/s51。 a)第一代仿生鱼“HRF.I” b)第二代仿生鱼“HRF-Ⅱ” 图1-10哈尔滨工业大学研制的两代仿生机器鱼3,] 2007年他们又研制出了第二代仿生机器鱼“HRF-Ⅱ”,如图1-10(b)所示, 采用模块化设计,尾鳍靠单电机驱动,头部采用吸排水的方式来实现上浮和 下潜[3]。 北京航空航天大学很早就开始研究仿生鱼机器人的研究工作,研制出了 仿生鳗鱼的实验模型,游速可达0.6m/s。在2004年,北京航空航天大学的机 器人研究所和中科院自动化所联合制作了一条仿生机器鱼,参与了郑成功古 战船遗址的水下探测,如图1-11所示181。 图1-11北京航空航天大学研制的仿生机器鱼8) 在2007年之后国内开始了以水母为仿生对象的仿生研究,哈尔滨工程 大学、中科院自动化所和哈尔滨工业大学分别展开了对仿生水母的理论和实 验研究。 哈尔滨工程大学在2007年研制了仿水母机器人“JLM1”,如图1-12所 示。该仿水母机器人以桃花水母为仿生对象,通过对水母的静态参数和动 -7. 万方数据
哈尔滨工业大学工程硕士学位论文 哈尔滨工业大学的陈维山课题组研制了两代仿生机器鱼样机。在 2006 年他们研制出了仿生机器鱼“HRF-Ⅰ”,如图 1-10(a)所示,该样机采用了单 电机驱动两关节尾鳍的推进方式,同时设置了胸鳍来实现上浮和下潜动作, 游动速度可达 0.5m/s[5] 。 a)第一代仿生鱼“HRF-Ⅰ” b)第二代仿生鱼“HRF-Ⅱ” 图 1-10 哈尔滨工业大学研制的两代仿生机器鱼[3,5] 2007 年他们又研制出了第二代仿生机器鱼“HRF-Ⅱ”,如图 1-10(b)所示, 采用模块化设计,尾鳍靠单电机驱动,头部采用吸排水的方式来实现上浮和 下潜[3] 。 北京航空航天大学很早就开始研究仿生鱼机器人的研究工作,研制出了 仿生鳗鱼的实验模型,游速可达 0.6m/s。在 2004 年,北京航空航天大学的机 器人研究所和中科院自动化所联合制作了一条仿生机器鱼,参与了郑成功古 战船遗址的水下探测,如图 1-11 所示[18] 。 图 1-11 北京航空航天大学研制的仿生机器鱼[18] 在 2007 年之后国内开始了以水母为仿生对象的仿生研究,哈尔滨工程 大学、中科院自动化所和哈尔滨工业大学分别展开了对仿生水母的理论和实 验研究。 哈尔滨工程大学在 2007 年研制了仿水母机器人“JLM1”,如图 1-12 所 示[19] 。该仿水母机器人以桃花水母为仿生对象,通过对水母的静态参数和动 - 7 - 万方数据