第6卷第1期 智能系统学报 Vol.6 No.1 2011年2月 CAAI Transactions on Intelligent Systems Feb.2011 doi:10.3969/i.issn.1673-4785.2011.01.002 协作多机器人系统研究进展综述 吴军,徐昕,连传强,贺汉根 (国防科技大学机电工程与自动化学院,湖南长沙410073) 摘要:协作多机器人系统是近年来机器人研究的热点,具有良好的应用前景.针对开展相关研究的迫切需要,总结 了协作多机器人系统研究的国内外发展现状,并分别对无意识协作的仿生多机器人系统和有意识协作的异构多机 器人系统研究进行论述.重点从系统构建和优化控制的宏观角度出发,对有意识协作异构多机器人系统的体系结 构、环境感知以及优化控制3个方面的研究进展分别展开论述:对典型的多机器人验证任务和软硬件实验平台进行 了总结;最后对协作多机器人系统的研究方向进行了展望. 关键词:多机器人系统:协作协调:系统构建:优化控制:环境感知;实验平台 中图分类号:TP24文献标识码:A文章编号:16734785(2011)010013-15 A survey of recent advances in cooperative multi-robot systems WU Jun,XU Xin,LIAN Chuangiang,HE Han'gen (College of Mechtronics and Automation,National University of Defense Technology,Changsha 410073,China) Abstract:Cooperative multi-robot systems have been a particularly popular topic within robotics because of their po- tential applications.To meet the demand of promoting relevant study,the current research and development situa- tion of cooperative multi-robot systems were systematically reviewed and summarized.Research concerning the un- conscious bionic swarm-cooperation multi-robot and the heterogeneous intentional-cooperation multi-robot was dis- cussed.In particular,to build and optimize heterogeneous intentional-cooperation multi-robot systems,the recent advances in system structure,environment perception,and control optimization were surveyed and analyzed.More- over,the benchmark tasks and universal software/hardware platforms for a multi-robot were summarized.Finally, future developments in cooperative multi-robot system research were discussed. Keywords:multi-robot system;cooperation and coordination;system modeling;optimization control;environmen- tal perception;experimental platform 早在20世纪40年代中期,Walter、Wiener和 作性是多机器人系统的重要特征和关键指标,并最 Shannon在研究世界上第一种人工生命一龟形机 早由Noreils定义为:多个机器人协同工作,完成单 器人时,就发现这些简单的机器人在相互作用中能 个机器人无法完成的任务,或改善工作过程,并获得 反映出“复杂的群体行为”).自从80年代末期建 更优的系统性能5).通过适当的协作机制,多机器 立世界上首个基于多智能体的多机器人系统(cl- 人系统可以获得系统级的非线性功能增量6],从而 lular robotic system,CEBOT)[2以来,多机器人系统 突破单机器人系统在感知、决策及执行能力等方面 在理论和应用研究上都取得了显著的进展3).简而 受到的限制,从本质上提高系统性能,甚至完成单个 言之,多机器人系统是指通过组织多智能体结构,并 机器人无法实现的任务! 协作完成某一共同任务的机器人群体4.其中,协 此外,相对于单个机器人系统,多机器人系统拥 有时间、空间、功能、信息和资源上的分布特性,从而 收稿日期:201006-17. 在任务适用性、经济性、最优性、鲁棒性、可扩展性等 基金项目:国家自然科学基金资助项目(60T4076,60703072,90g20302) 方面表现出极大的优越性,因此在军事、工业生产、 通信作者:吴军.E-mail:aresnudt@yahoo.com.cn. 交通控制等领域具有良好的应用前景.美国国防高
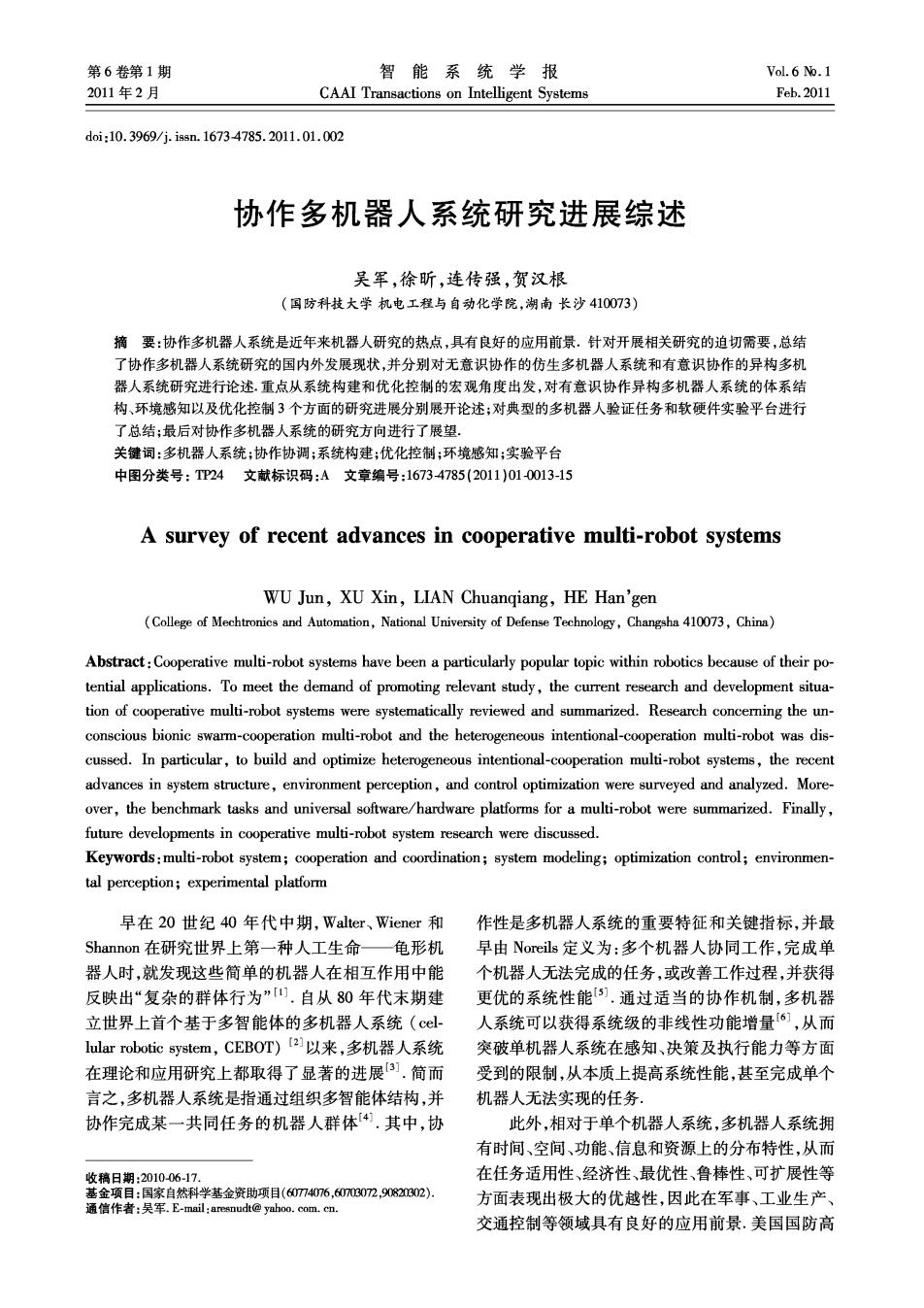
·14 智能系统学报 第6卷 级研究计划局(defense advanced research projects a- 表1多机器人系统的协作机制分类 gency,DARPA)、美国海军和能源部都对多机器人 Table 1 Taxonomy of cooperation mechanism in multi-ro- 系统的研究进行了大力资助,美国宇航局和空军也 bot systems 将多机器人的编队控制技术确定为21世纪的关键 协作 分类 特点 任务范围 技术.DARPA涉及到多机器人作战平台的研究计划 就包括MARS-2020、TASK、TMR和SDR等,如 多为同构系统:个 MARS-2020计划71,持续时间长(到2020年)、支持 体功能简单,数量 力度大,其目的是研究战场环境下各种智能武器平 众多;通过本地交 台通过通信进行任务制定、规划和协调合作,共同完 互,得到全局的突 适合于大空间、无 成任务的组织框架和方法.美军资助的多机器人研 现行为;控制器设 时间要求的重复 无意识协作 计简单;系统鲁棒 性操作任务,如清 究项目就包括UGV Demo///C[]、CENTIBOTS) 性好;无全局目 扫、采集等 Swarm BotSuperBot HUNT(heterogeneous un- 标,系统性能难于 manned networked teams)[2]等.欧盟也很早就开展 控制;不适用于复 了多机器人协同搬运的MARTHA项目研究B1,有 杂任务。 代表性的研究工作还包括:瑞士苏黎世大学开展的 多为异构系统:系 生物机器人与群体智能研究4],瑞士联邦工学院开 统规模较小,个体 展的多机器人任务分配和规划问题研究5],意大利 智能水平较高;拥 Antonelli开展的零空间编队控制方法研究16),比利 有全局目标,系统 时布鲁塞尔大学的集群机器人系统研究]等.而日 适合于其他复杂 有意识协作性能易于掌握,可 的任务. 本的多机器人研究工作主要集中在仿生多机器人系 以获得更优化的 统上,如名古屋大学的CEB0T和日产公司利用鱼类 解;对通信要求较 仿生技术开发的多机器人系统“EPORO”[18]等.国 高;对协调控制机 内的多机器人系统研究则起步较晚,但发展很快,中 制依赖性较大。 科院自动化所、上海交大、哈工大、中南大学、东北大 无意识协作多机器人系统主要仿生社会性生物 学等科研院所都开展了各具特色的研究工作,并在 群落(蚁群、蜂群等)的运行机制,利用大量简单、无 国际多机器人足球赛上屡创佳绩的事实也证明我国 意识的自主个体,通过局部交互和自组织作用,使 在多机器人技术研究方面取得了巨大进步】 整个系统呈现协调、有序的状态,并最终达到较高的 虽然多机器人协作可以提高系统性能,但多个 集群智能21.比较典型的系统包括:瑞士联邦理工 机器人并存也导致了某些新的问题9],如增加了系 学院的Alice24]、日本名古屋大学的CEB0T2]、美国 统协调管理的难度;增加了系统整体状态的不确定 MT的Swarm Bot集群机器人系统[io]、美国Sandia 性;增加了系统对通信的依赖性等.为了克服不利因 国家实验室的MARVI2)、美国南加州大学的Super- 素,提高系统协作性能,必须对多机器人系统的关键 Bot)以及德国斯图加特大学的进化多机器人有机 技术开展深入研究.本文将从系统控制与优化的角 体]等.基于仿生的集群机器人系统研究可进一步 度出发,对近年来多机器人系统研究领域的主要进 分为基于突现行为的集群机器人系统研究与可重配 展和部分有代表性的研究成果进行介绍,为国内从 置机器人系统研究,二者的差别在于后者需要通过 事多机器人系统研究的科研人员提供参考 特定的连杆和关节模块实现组合操作,以形成特殊 1多机器人系统分类 的构型,并完成指定的功能.基于仿生原理的无意识 协作多机器人系统适用于大空间范围内无时间要求 根据协作机制不同,多机器人协作包括2 的重复性工作,如清扫任务;同时也适用于危险或有 类0:无意识协作和有意识协作.无意识协作多出 害区域内的监测、探索和搜寻任务,如可用许多小型 现在简单同构的多机器人系统中,主要利用突现原 轻便的、可丢弃的、相对廉价的机器人来完成核辐射 理获得高层的协作行为[21]:而有意识的协作主要用 区域内的监测任务.由于基于仿生的多机器人系统 于异构机器人协作技术的研究[22],并更多地依赖于 研究在国内开展较少,下面将重点对有意识协作的 规划来提高协作效率(参见表1). 异构多机器人系统的研究进展展开论述

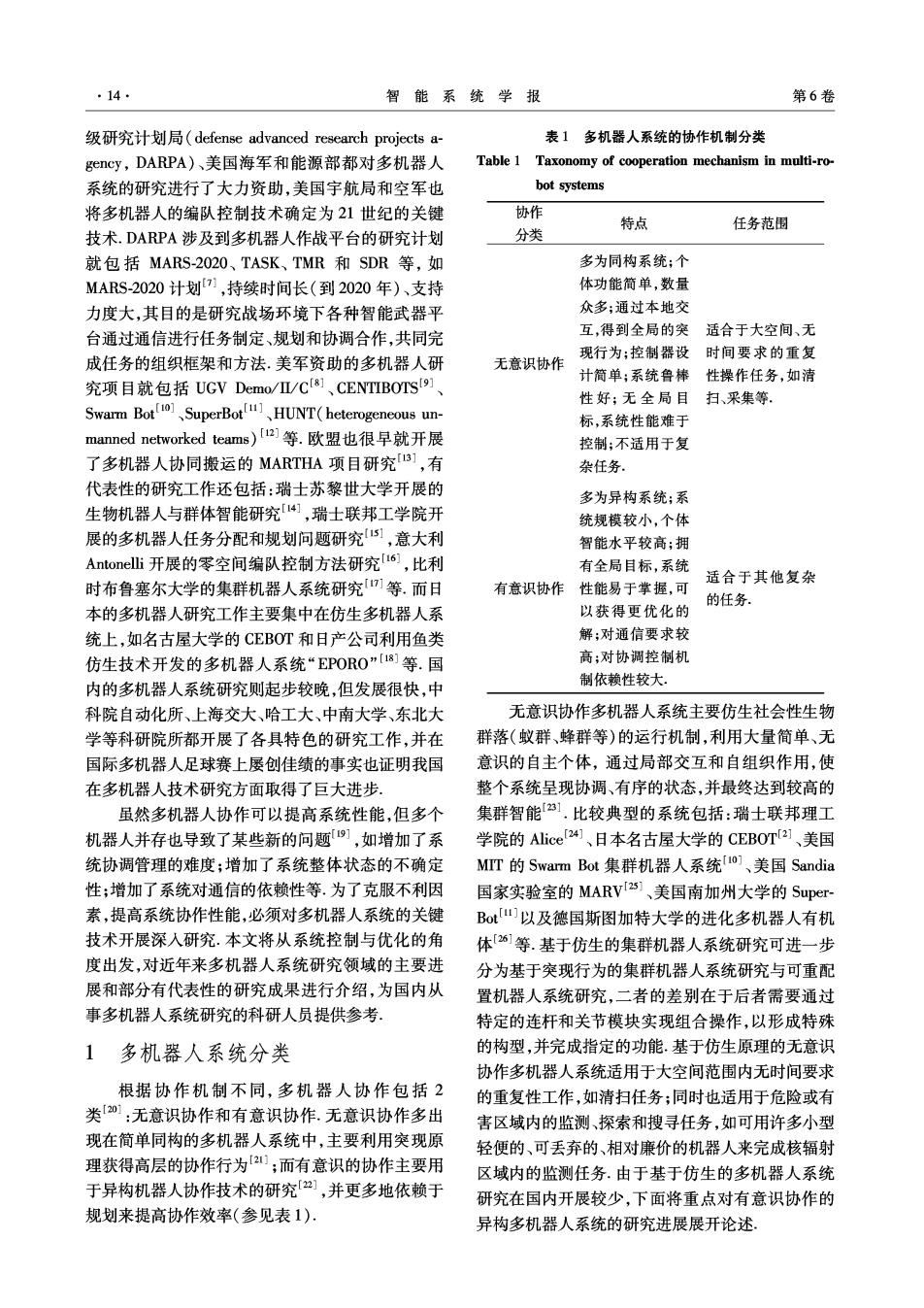
第1期 吴军,等:协作多机器人系统研究进展综述 ·15 2有意识协作的异构多机器人系统 式,它定义了整个系统内的各机器人之间的相互关 系和功能分配,确定了系统和各机器人之间的信息 在实际应用中,多机器人系统的成员个体往往存 流通关系及其逻辑上的拓扑结构,决定了任务分解 在设计、结构、乃至智能上的差异,因此多为异构系统 和角色分配、规划及执行等操作的运行机制,提供了 异构多机器人系统通常数量有限(几个到几十个),但 机器人活动和交互的框架0.选择合适的体系结 可以达到系统整体的最优配置].对于有意识协作的 构,是多机器人系统正常、高效运转的关键,也是构 异构多机器人系统,尽管已有多篇文献对协作多机器 建多机器人系统的首要问题,如日本Asama等提出 人系统的研究进行了综述”,但基本都是针对多机 ACTRESS系统结构[3],美国学者Beni等研究的 器人系统研究中的若干具体问题进行论述,如任务分 SWARM系统结构[],Le Pape提出了GOFER结 配、运动规划、合作搬运等.本文将从系统优化控制的 构4,Parker等提出了ALLIANCE结构341,Vidal 宏观角度出发,整体上把多机器人系统视作一个控制 等提出了一种混合层次体系结构35],王醒策等针对 对象,对其构建与优化研究展开相关的总结.总的来 多机器人编队提出了分层的体系结构],陈卫东等 说,一个优秀的多机器人系统必须有如下特点:合理的 采用递阶混合式结构进行多机器人编队和收集垃 系统体系结构、正确的环境感知能力、优化的决策控制 圾[],而崔益安则尝试建立一个通用与开放的、适 策略(具体如图1所示), 应于非结构环境的自组织分层式结构SCLA[] 多机器人系统 虽然特定环境或任务会造成系统结构具有一定 休系结构 的特殊性,但可以从影响体系结构的几个主要系统维 (如组织结构、通信方式、控制结构、团队组成和团队 优化控制 感知与建模 规模)入手,决定到底采用何种体系结构,如表2. 表2系统结构中的主要系统维 环境 Table 2 Main dimensions for system structure 系统组成 具体描述 图1多机器人系统的控制原理 指系统内部成员的相互关系和拓扑结构,分 组织结构 Fig.1 Control schematic diagram for multi-robot system 为集中式、分布式和混合式结构3种 所以,在后续论述中,将围绕构建合理高效的多 通信方式决定了机器人之间的交互方式,分 机器人系统这一研究主线,从协作多机器人系统的 通信方式 隐式通信和显式通信2类. 体系结构、环境感知与优化控制3个方面展开论述, 专指多机器人系统的控制结构,是系统决策 并得到协作多机器人系统关键技术研究的树状结构 控制结构 的方式,分为慎思型和反应型两大类。 图,如图2所示 根据机器人功能异同分为同构/异构机器人 团队组成 石意识协作的异构 团队 多机器人系统研究 团队规模主要由机器人的数量决定, 体系结构 优化控制 由于系统规模对有意识协作的异构多机器人系 环境感知 统性能影响较大,规模越大,对协同和通信能力要求 组织结构 学习优化 越高,除了少数特例(如CENTIBOTS91由97个Ami- (控制结构 任务分配 0机器人和6个P2-AT机器人组成)外,有意识协 通信方式 协调控制 信息融分 定位建图 作的异构多机器人系统一般团队规模较小,所以本 文将重点讨论其他3个系统维:组织结构、通信方式 图2多机器人系统研究内容的树状结构 和控制结构. Fig.2 Tree-like schematic-diagram for heterogeneous 2.1.1组织结构 multi-robot system research 多机器人组织结构可分为集中控制结构和分散 2.1系统体系结构 控制结构,而分散控制结构又可进一步分为分布控 多机器人体系结构是指系统中各机器人之间的 制结构和混合控制结构[9],具体见表3. 信息关系和控制关系,以及问题求解能力的分布模

·16 智能系统学报 第6卷 表3多机器人组织结构分类和对比 2)显式通信.显式通信通常需要专用硬件通信 Table 3 Taxonomy and comparison for multi-robot system 设备以及复杂的信息表示模型,机器人之间可直接 organization 进行信息交换,是一种开销大、不可靠的通信方法。 类型 特点 应用实例 显式通信可以进一步分为全局通信和局部通信:全 局通信中,所有机器人之间都具有全局范围内的符 适合强协调任务,分主、从机 器人,主机器人负责系统协文献[40],此 号通信能力,系统通信效率随机器人的数量增加而 急剧下降,通信干扰和延迟将严重影响系统的可靠 集中式 调,具有完全的控制权.该方 外,大多数的微 式可减少协商通信的开销,并 型足球机器人 性,一般仅适用于小规模的多机器人系统5;而局 结构 获得全局最优解,但实时性和 团队采用的集 部通信则由于通信距离和通信拓扑的限制,仅发生 动态性较差,结构灵活性不 中式组织结构. 在局部范围内,但通过设计合理的通信机制,可兼顾 足,鲁棒性较差。 效率和可靠性52s 显式通信可利用现有网络技术,如文献[54]对 ROCI、层次 基于802.11g标准的无线局域网WLAN在TCP协 适合弱协调任务,机器人之间 化和对象可重 无隶属关系,通过交互或通信 议下的延时特性进行了测试和分析,并指出了构建 构)、多模式交 分布式实现协调.该方式可降低系统 基于WLAN的多机器人系统时所应该考虑的关键 互4)、Ad Hoc 结构复杂性,提高扩展性和鲁棒 因素.为了保证通信的有效性和实时性,可以通过设 网络)、MAC 性.对通信要求较高,不保证 计多机器人系统专用的通信机制]和通信语言] ROBE和RO 目标的全局最优性, 实现:还可以采用基于强化学习的自适应通信协 MAN[]等. 议[,提高系统对不同通信环境的适应性.此外,在 本质上是一种层次结构,上层 提高多机器人系统通信的容错性和可靠性等方面可 的领导机器人动态生成,且对 以借鉴文献[5860]: 下层的机器人只有部分控制 ALLIANCE!I 2.1.3控制结构 混合式 能力.该方式可实现集中和分 和文献[5,46] 结构 这里的控制结构不是单个机器人的控制结构, 布结构的互补,提高系统灵活 等 而是指整个多机器人系统的控制结构[6].控制结构 性和协调效率.但复杂性高, 可分为反应式和慎思式2种:当一个团队在应对环 实现难度大。 境改变时可以根据策略重新组织整个团队的行为, 2.1.2通信方式 则为慎思型的控制结构,具体如文献[6263];而每 通信也是多机器人系统的一个重要研究问题, 个机器人在应对环境变化时,仅仅对自己所采取的 系统的通信方式决定了机器人之间的相互作用方 策略进行重组,以更好地完成自身的任务,则为反应 式1,在多机器人系统中,为了实现机器人的同步 式的控制结构,具体如文献[64-65].所以,二者的主 或协调,信息交互是必不可少的.而且大量的应用实 要差别在于对新状态所采取的不同应对策略,即在 践也证明,合理的通信可以大大提高系统运行效率. 慎思型系统中,会利用长期规划并充分利用所有可 总的来说,机器人之间的通信方式可以分为隐式通 用资源来实现1个全局目标;而在1个反应式系统 信和显式通信2类) 中,每个机器人仅仅考虑当前机器人面临的态势,并 1)隐式通信.隐式通信利用机器人的行为对产 给出独自的规划操作 生环境的变化来影响其他机器人的行为,如基于 2.2环境感知与建模 Stigmerg罗机制9]的通信方式,个体以环境为作用中 多机器人系统要实现优化决策,并获得良好的 介,通过利用或者改变环境中的信息,来激励自身或 协调控制性能,必须依赖于准确可靠的环境感知能 者其他个体的行为,最终达到信息交流和自组织的 力.随着各种先进传感设备和配套应用软件的不断 目的.隐式通信的特点在于局部交互和简单的信息 开发,机器人已经大大拓展了自己的感知空间和感 表示模型,且不会随着群体数量的增加而产生通信 知能力,但如何充分利用多个机器人的传感资源,提 瓶颈问题,整个通信方式非常简单、有效和可靠.隐 高协同感知精度和能力,具有很高的研究价值 式通信的研究重点在于如何通过环境信息的改变和 2.2.1信息融合 简单信号的感知进行局部信息交换0] 通过协作感知来提高环境感知能力一直是多机
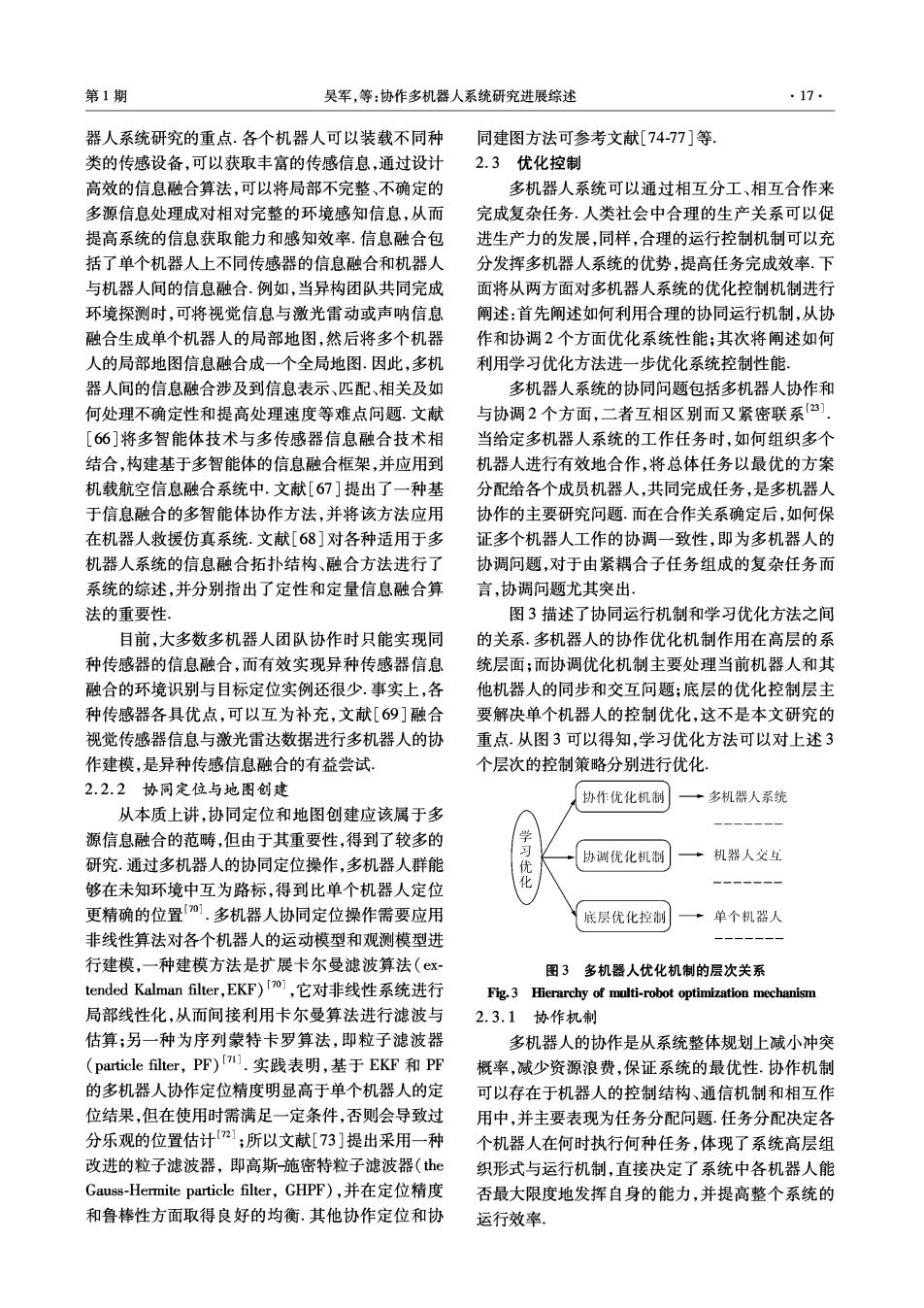
第1期 吴军,等:协作多机器人系统研究进展综述 ·17 器人系统研究的重点.各个机器人可以装载不同种 同建图方法可参考文献[74-77]等 类的传感设备,可以获取丰富的传感信息,通过设计 2.3优化控制 高效的信息融合算法,可以将局部不完整、不确定的 多机器人系统可以通过相互分工、相互合作来 多源信息处理成对相对完整的环境感知信息,从而 完成复杂任务,人类社会中合理的生产关系可以促 提高系统的信息获取能力和感知效率.信息融合包 进生产力的发展,同样,合理的运行控制机制可以充 括了单个机器人上不同传感器的信息融合和机器人 分发挥多机器人系统的优势,提高任务完成效率.下 与机器人间的信息融合.例如,当异构团队共同完成 面将从两方面对多机器人系统的优化控制机制进行 环境探测时,可将视觉信息与激光雷动或声呐信息 阐述:首先阐述如何利用合理的协同运行机制,从协 融合生成单个机器人的局部地图,然后将多个机器 作和协调2个方面优化系统性能:其次将阐述如何 人的局部地图信息融合成一个全局地图.因此,多机 利用学习优化方法进一步优化系统控制性能, 器人间的信息融合涉及到信息表示、匹配、相关及如 多机器人系统的协同问题包括多机器人协作和 何处理不确定性和提高处理速度等难点问题.文献 与协调2个方面,二者互相区别而又紧密联系3], [66]将多智能体技术与多传感器信息融合技术相 当给定多机器人系统的工作任务时,如何组织多个 结合,构建基于多智能体的信息融合框架,并应用到 机器人进行有效地合作,将总体任务以最优的方案 机载航空信息融合系统中.文献[67]提出了一种基 分配给各个成员机器人,共同完成任务,是多机器人 于信息融合的多智能体协作方法,并将该方法应用 协作的主要研究问题.而在合作关系确定后,如何保 在机器人救援仿真系统.文献[68]对各种适用于多 证多个机器人工作的协调一致性,即为多机器人的 机器人系统的信息融合拓扑结构、融合方法进行了 协调问题,对于由紧耦合子任务组成的复杂任务而 系统的综述,并分别指出了定性和定量信息融合算 言,协调问题尤其突出, 法的重要性, 图3描述了协同运行机制和学习优化方法之间 目前,大多数多机器人团队协作时只能实现同 的关系.多机器人的协作优化机制作用在高层的系 种传感器的信息融合,而有效实现异种传感器信息 统层面:而协调优化机制主要处理当前机器人和其 融合的环境识别与目标定位实例还很少.事实上,各 他机器人的同步和交互问题;底层的优化控制层主 种传感器各具优点,可以互为补充,文献[69]融合 要解决单个机器人的控制优化,这不是本文研究的 视觉传感器信息与激光雷达数据进行多机器人的协 重点.从图3可以得知,学习优化方法可以对上述3 作建模,是异种传感信息融合的有益尝试。 个层次的控制策略分别进行优化, 2.2.2协同定位与地图创建 协作优化机制 →多机器人系统 从本质上讲,协同定位和地图创建应该属于多 源信息融合的范畴,但由于其重要性,得到了较多的 研究.通过多机器人的协同定位操作,多机器人群能 协调优化机制 机器人父互 够在未知环境中互为路标,得到比单个机器人定位 更精确的位置[0].多机器人协同定位操作需要应用 底层优化控制 ·单个机器人 非线性算法对各个机器人的运动模型和观测模型进 行建模,一种建模方法是扩展卡尔曼滤波算法(ex- 图3多机器人优化机制的层次关系 tended Kalman filter,EKF)Io,它对非线性系统进行 Fig.3 Hierarchy of multi-robot optimization mechanism 局部线性化,从而间接利用卡尔曼算法进行滤波与 2.3.1协作机制 估算;另一种为序列蒙特卡罗算法,即粒子滤波器 多机器人的协作是从系统整体规划上减小冲突 (particle filter,PF)[.实践表明,基于EKF和PF 概率,减少资源浪费,保证系统的最优性.协作机制 的多机器人协作定位精度明显高于单个机器人的定 可以存在于机器人的控制结构、通信机制和相互作 位结果,但在使用时需满足一定条件,否则会导致过 用中,并主要表现为任务分配问题.任务分配决定各 分乐观的位置估计”1;所以文献[73]提出采用一种 个机器人在何时执行何种任务,体现了系统高层组 改进的粒子滤波器,即高斯施密特粒子滤波器(the 织形式与运行机制,直接决定了系统中各机器人能 Gauss-Hermite particle filter,GHPP),并在定位精度 否最大限度地发挥自身的能力,并提高整个系统的 和鲁棒性方面取得良好的均衡.其他协作定位和协 运行效率