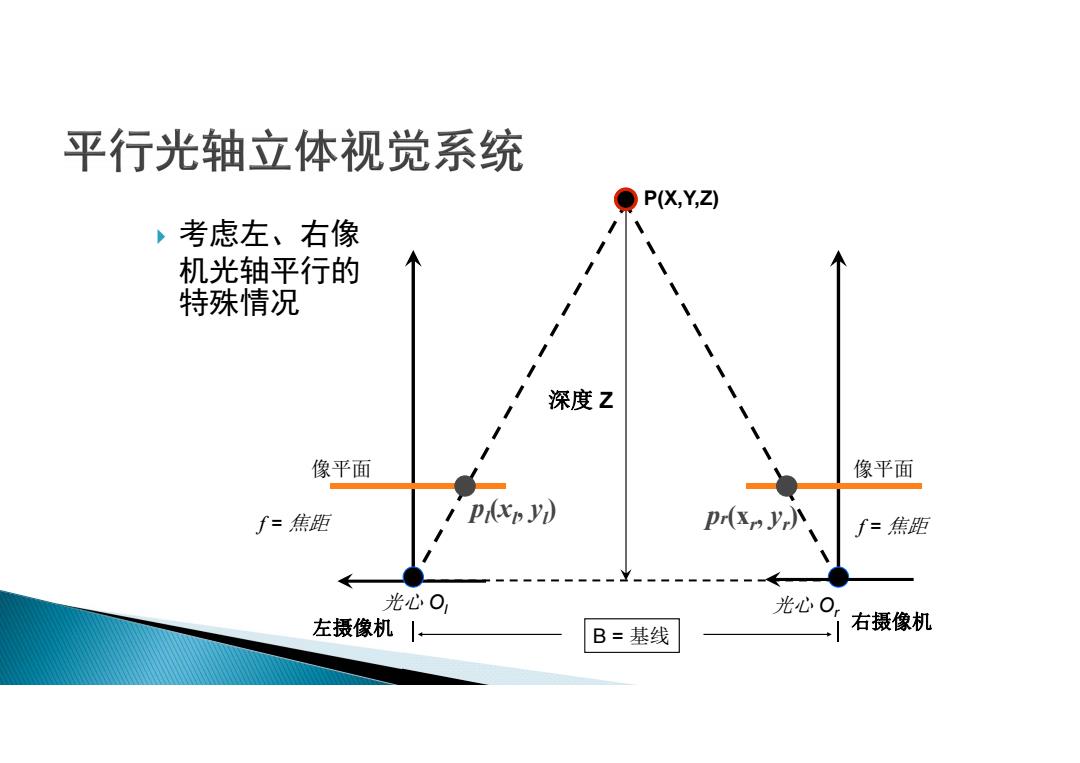
平行光轴立体视觉系统 ●P(XY,Z) ,考虑左、右像 机光轴平行的 特殊情况 深度Z 像平面 像平面 f=焦距 Pxpy) pr(x f=焦距 光心O 光心0 左摄像机丨 右摄像机 B=基线
考虑左、右像 机光轴平行的 特殊情况 P(X,Y,Z) pl(xl, yl) 光心 Ol f = 焦距 像平面 左摄像机 B = 基线 深度 Z f = 焦距 光心 Or pr(xr, yr) 像平面 右摄像机

立体视觉基本原理 X x-x_I P 思考:该视差公式隐含了什么条件? B·f B 2= d d=x-x'称为视差
x’ z f x C C’ X B f xx f B z d xx B f z d d = x - x' 称为视差 立体视觉基本原理 思考:该视差公式隐含了什么条件?
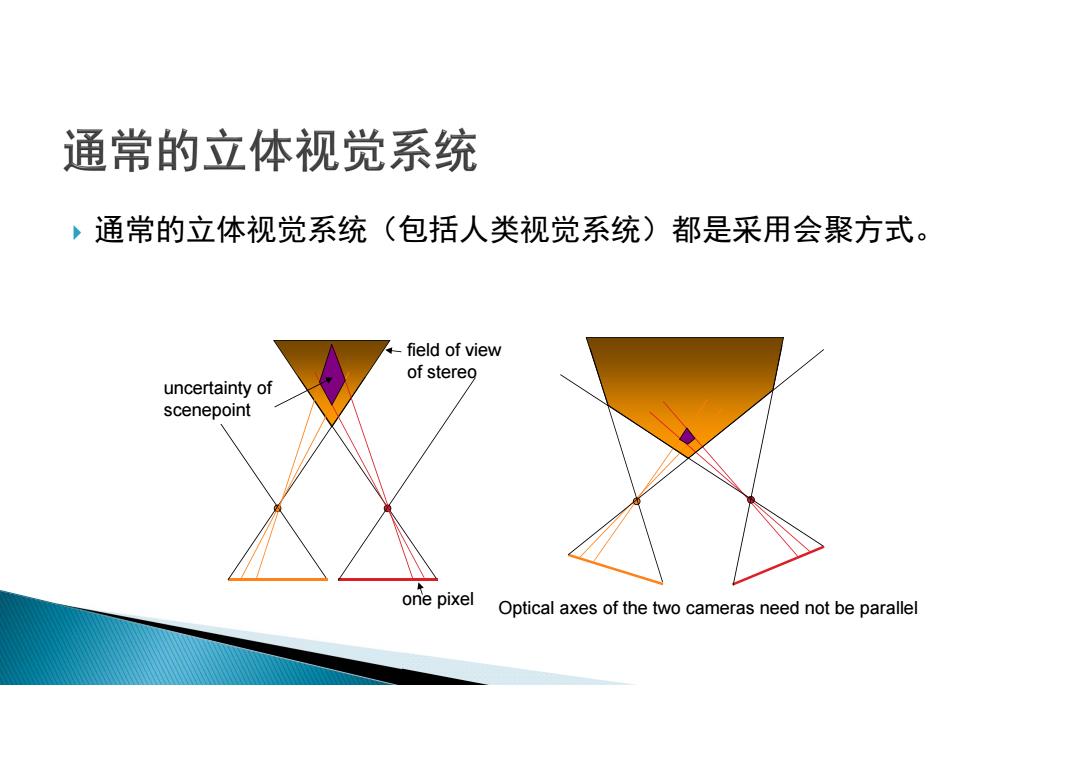
通常的立体视觉系统 ,通常的立体视觉系统(包括人类视觉系统)都是采用会聚方式。 ←field of view of stereo uncertainty of scenepoint one pixel Optical axes of the two cameras need not be parallel
通常的立体视觉系统(包括人类视觉系统)都是采用会聚方式。 field of view of stereo one pixel uncertainty of scenepoint Optical axes of the two cameras need not be parallel

几种立体视觉系统比较 ,平行光轴立体视觉系统 。短基线 ·较大的公共视野区域 ·深度误差(不确定区域) 较大 Left right
平行光轴立体视觉系统 ◦ 短基线 较大的公共视野区域 深度误差(不确定区域)较大
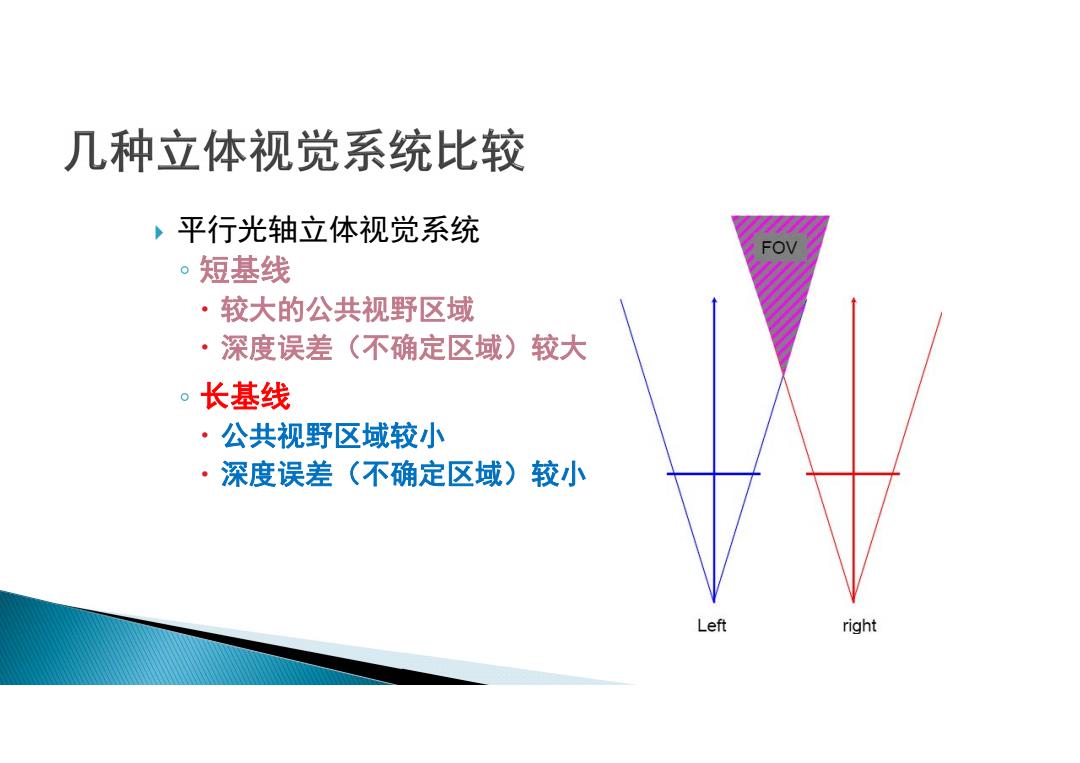
几种立体视觉系统比较 ,平行光轴立体视觉系统 。短基线 ·较大的公共视野区域 ·深度误差 (不确定区域) 较大 。长基线 ·公共视野区域较小 ·深度误差(不确定区域)较小 Left right
平行光轴立体视觉系统 ◦ 短基线 较大的公共视野区域 深度误差(不确定区域)较大 ◦ 长基线 公共视野区域较小 深度误差(不确定区域)较小