
计算立体视觉 Displacement Computer (Stereo Baseline) eft 2D Image Right 2D Image 3D View
Displacement (Stereo Baseline) Left 2D Image Right 2D Image Computer 3D View

9.1双目立体视觉几何
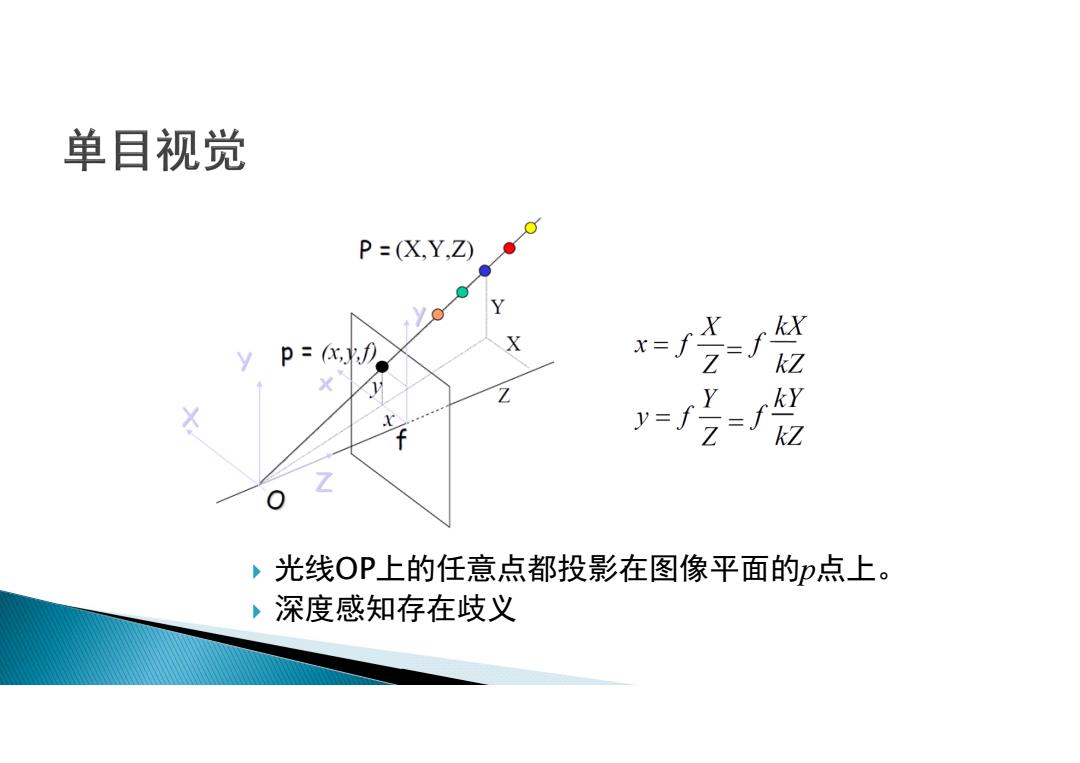
单目视觉 P=(X.Y.Z) ●0 X y p=(ck0。 X x= Z Z Z ,光线OP上的任意点都投影在图像平面的p点上。 ,深度感知存在歧义
光线OP上的任意点都投影在图像平面的p点上。 深度感知存在歧义

双目视觉 01 Op ,第二个像机可解决单目存在的深度歧义 ,可通过三角测量获得深度
第二个像机可解决单目存在的深度歧义 可通过三角测量获得深度

三角测量 Pr ,两直线相交于一点 问题:如何根据p和p,点获取深度?
两直线相交于一点 pl pr 问题:如何根据 pl和 pr点获取深度?