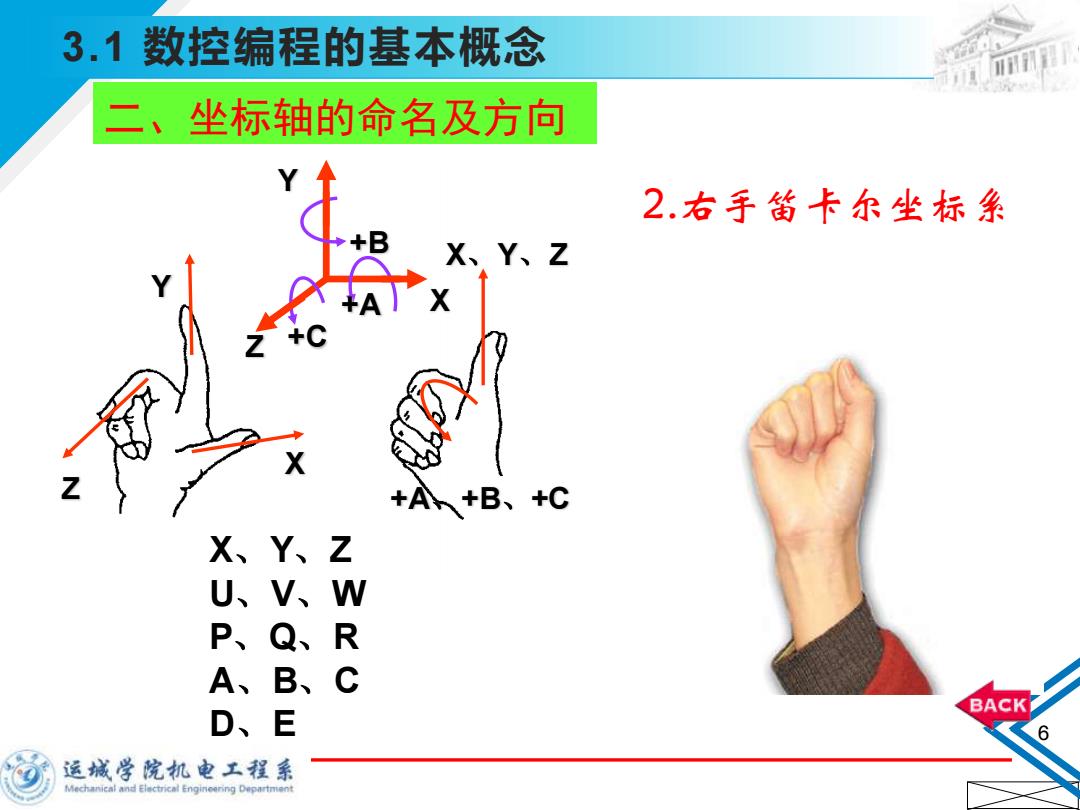
3.1数控编程的基本概念 二、坐标轴的命名及方向 2.右手笛卡尔坐标系 >+B X、Y、Z +A+B、+C X、 、Z U、 V、 W P、 Q、 R A、 B、 C BACK D、 E 6 运城学院机电工程系 Mechanical and Electrical Engineering Department
2022/11/23 6 3.1 数控编程的基本概念 X Y Z X、Y、Z +A、+B、+C X Z Y +C +B +A 二、坐标轴的命名及方向 X、Y、Z U、V、W P、Q、R A、B、C D、E 2.右手笛卡尔坐标系
3.1数控编程的基本概念 17 二、坐标轴的命名及方向 3.乙坐标的确定 ~方位 标准规定:乙坐标∥主轴轴线的进给轴。 若设有主轴(牛头刨床)或者有多个主轴,则选择垂直于工件装 夹面的方向为Z坐标。 若主轴能摆动: 在摆动的范围内只与标准坐标系中的某一坐标平行时, 则这个坐标便是Z坐标; 若在摆动的范圆内与多个坐标平行,则取垂直于工件装 夹面的方向为乙坐标。 >乙坐标正方向的规定:刀具远离工件的方向。 BACK 运城学院机电工程系 Mechanical and Electrical Engineering Department
2022/11/23 7 3.1 数控编程的基本概念 3. Z坐标的确定 ➢ 方位 标准规定:Z坐标∥主轴轴线的进给轴。 若没有主轴(牛头刨床)或者有多个主轴,则选择垂直于工件装 夹面的方向为Z坐标。 若主轴能摆动: 在摆动的范围内只与标准坐标系中的某一坐标平行时, 则这个坐标便是Z坐标; 若在摆动的范围内与多个坐标平行,则取垂直于工件装 夹面的方向为Z坐标。 ➢ Z坐标正方向的规定:刀具远离工件的方向。 二、坐标轴的命名及方向
3.1数控编程的基本概念 二、坐标轴的命名及方向 4.X坐标的确定(水平,且平行于工件装夹面) ~在刀具旋转的机床上(铣床、钻床、使床等) Z轴水平(卧式) 从刀具(主轴)向工件看时,X坐标的正方向指向右边。 Z轴垂直(立式) 单立柱机床,从刀具向立柱看时,X的正方向指向右边; 双立柱机床(龙门机床),从刀具向左立柱看时,X轴的正云 向指向右边。 ~在工件旋转的机床上(车床、磨床等) X轴的运动方向是工件的径向并平行于横向拖板,且刀具离开 工件旋转中心的方向是X轴的正方向。 BACKI 8 运城学院机电工程系 Mechanical and Electrical Engineering Department
2022/11/23 8 3.1 数控编程的基本概念 主要内容 4. X坐标的确定(水平,且平行于工件装夹面) ➢ 在刀具旋转的机床上(铣床、钻床、镗床等) Z轴水平(卧式) 从刀具(主轴)向工件看时,X坐标的正方向指向右边。 Z轴垂直(立式) 单立柱机床,从刀具向立柱看时,X的正方向指向右边; 双立柱机床(龙门机床),从刀具向左立柱看时,X轴的正方 向指向右边。 ➢ 在工件旋转的机床上(车床、磨床等) X轴的运动方向是工件的径向并平行于横向拖板,且刀具离开 工件旋转中心的方向是X轴的正方向。 二、坐标轴的命名及方向
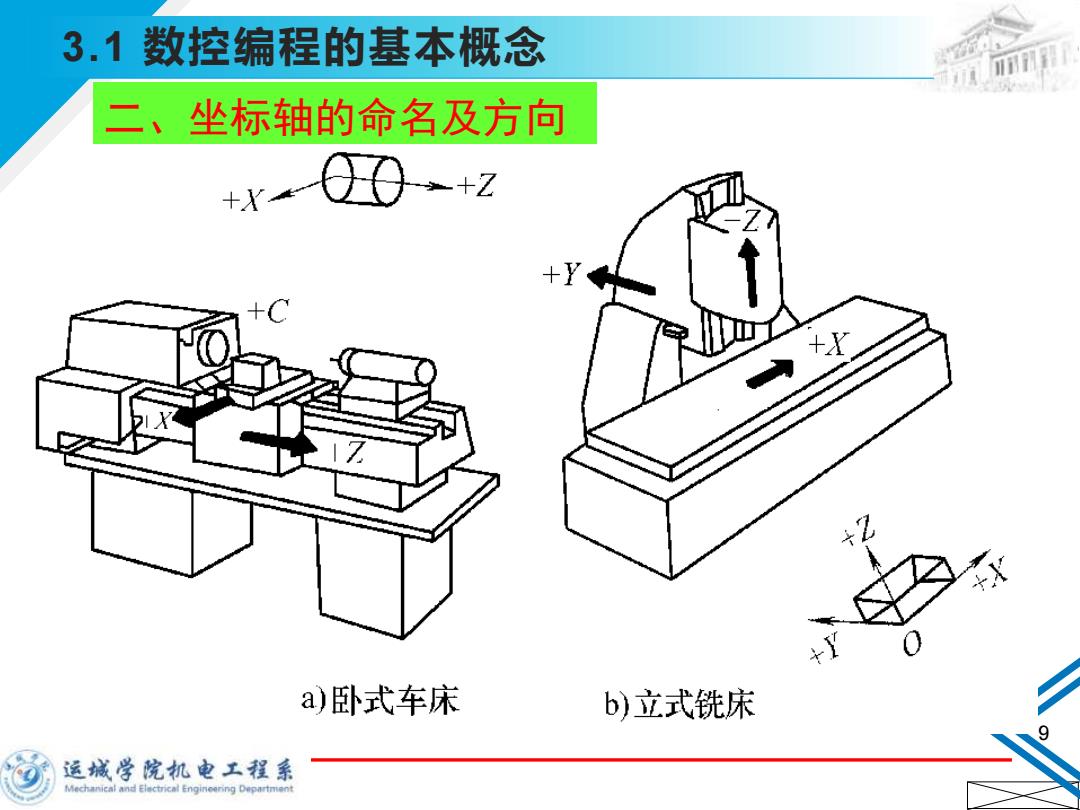
3.1数控编程的基本概念 二、坐标轴的命名及方向 +X 00-+z tr a)卧式车床 b)立式铣床 运城学院机电工程系 Mechanical and Electrical Engineering Department
2022/11/23 9 3.1 数控编程的基本概念 二、坐标轴的命名及方向
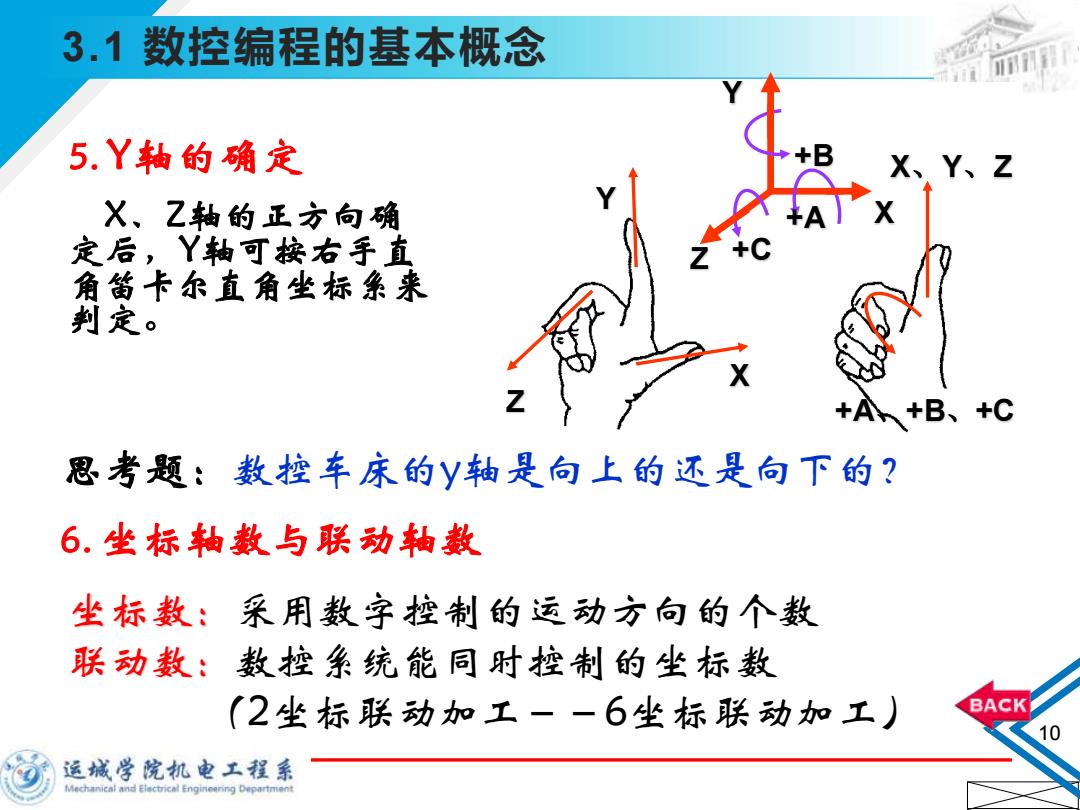
3.1数控编程的基本概念 5.Y轴的确定 +B X、Y、Z X、Z轴的正方向确 定后,Y轴可按右手直 角笛卡尔直角坐标系来 判定。 +A+B、+C 思考题:数控车床的y轴是向上的还是向下的? 6.坐标轴数与联动轴数 坐标数:采用数字控制的运动方向的个数 联动数:数控条统能同时控制的坐标数 (2坐标联动加工一一6坐标联动加工 BACKI 10 运城学院机电工程系 Mechanical and Electrical Engineering Department
2022/11/23 10 3.1 数控编程的基本概念 坐标数:采用数字控制的运动方向的个数 联动数:数控系统能同时控制的坐标数 (2坐标联动加工--6坐标联动加工) 5. Y轴的确定 X、Z轴的正方向确 定后,Y轴可按右手直 角笛卡尔直角坐标系来 判定。 X Y Z X、Y、Z +A、+B、+C X Z Y +C +B +A 6. 坐标轴数与联动轴数 思考题:数控车床的y轴是向上的还是向下的?