哈尔滨工程大学硕士学位论文 能被用于执行对其他行星的探测活动2 图l.7 Lemur lia机器人 图1.8最新型的Rhex系列机器人 美国密歇根大学、卡内基梅隆大学、加利福尼亚大学伯克利大学和加拿 大MeGill大学组成的研究组成功研制了仿生自主机器人Rhex,并以此为平 台延伸出多种型号,其中AQUA机器人为其最新型号,如图1.8所示,机器 人的基本尺寸大约为长65cm,宽50cm,高13cm,由铝合金材料制成,该机 器人很好的解决了水下动密封问题,而且其机载式镍氢电池可为其提供强大 的动力源,能不间断工作2小时。通过更换不同的运动工具及运动步态,可 以实现陆上行走和水中游泳,具备良好的两栖运动能力,机器人装备了外部 声纳定位仪和三目立体成像系统,可实现水下自动导航。 上海大学精密机械工程系的钱晋武教授研制出一种新型六足步行机器 人,该机器人的新型足一掌机构可以实现地一壁过渡行走,而且可以适应其 他形状的非平壁面(如球面、柱面),并且还对机器人的抗倾覆能力、波形步 态的最优性和过渡行走运动规划等方面进行了研究。 5.八足机器人 仿生水下机器人“水下龙虾”(Robolobster,BUR-001),由位于美国 马萨诸塞州(麻省)娜罕(Nahant)的东北大学海洋科学中心研制,如图1.9 所示该计划有美国国防高级研究计划局(DARPA)资助。其最终目标是使其 具备在海流和海浪的浅水区域内执行水雷搜索和引爆任务的能力。通过对龙 虾的腿、爪、腹部及尾部的运动进行精确分析,研制出的机器人共有24个自 由度,采用镍钛诺形状记忆合金材料制成的细棍作为线性驱动器驱动,通电 加热时肌肉就缩短,使龙虾的腿向上运动,一旦冷却就可以恢复原来的形状
哈尔滨T稃大学硕十学位论文 能被用于执行对其他行星的探测活动胆31。 图1.7 Lemur lia机器人 图1.8最新型的Rhex系列机器人 美国密歇根大学、卡内基梅隆大学、加利福尼亚大学伯克利大学和加拿 大McGill大学组成的研究组成功研制了仿生自主机器人Rhex,并以此为平 台延伸出多种型号,其中AQUA机器人为其最新型号,如图1.8所示,机器 人的基本尺寸大约为长65cm,宽50cm,高13cm,由铝合金材料制成,该机 器人很好的解决了水下动密封问题,而且其机载式镍氢电池可为其提供强大 的动力源,能不间断工作2小时。通过更换不同的运动工具及运动步态,可 以实现陆上行走和水中游泳,具备良好的两栖运动能力,机器人装备了外部 声纳定位仪和三目立体成像系统,可实现水下自动导航。 上海大学精密机械工程系的钱晋武教授研制出一种新型六足步行机器 人,该机器人的新型足一掌机构可以实现地一壁过渡行走,而且可以适应其 他形状的非平壁面(如球面、柱面),并且还对机器人的抗倾覆能力、波形步 态的最优性和过渡行走运动规划等方面进行了研究。 5.八足机器人 仿生水下机器人“水下龙虾”(Robolobster,BUR.001)㈣:51,由位于美国 马萨诸塞州(麻省)娜罕(Nahant)的东北大学海洋科学中心研制,如图1.9 所示该计划有美国国防高级研究计划局(DARPA)资助。其最终目标是使其 具备在海流和海浪的浅水区域内执行水雷搜索和引爆任务的能力。通过对龙 虾的腿、爪、腹部及尾部的运动进行精确分析,研制出的机器人共有24个自 由度,采用镍钛诺形状记忆合金材料制成的细棍作为线性驱动器驱动,通电 加热时肌肉就缩短,使龙虾的腿向上运动,一旦冷却就可以恢复原来的形状, 7
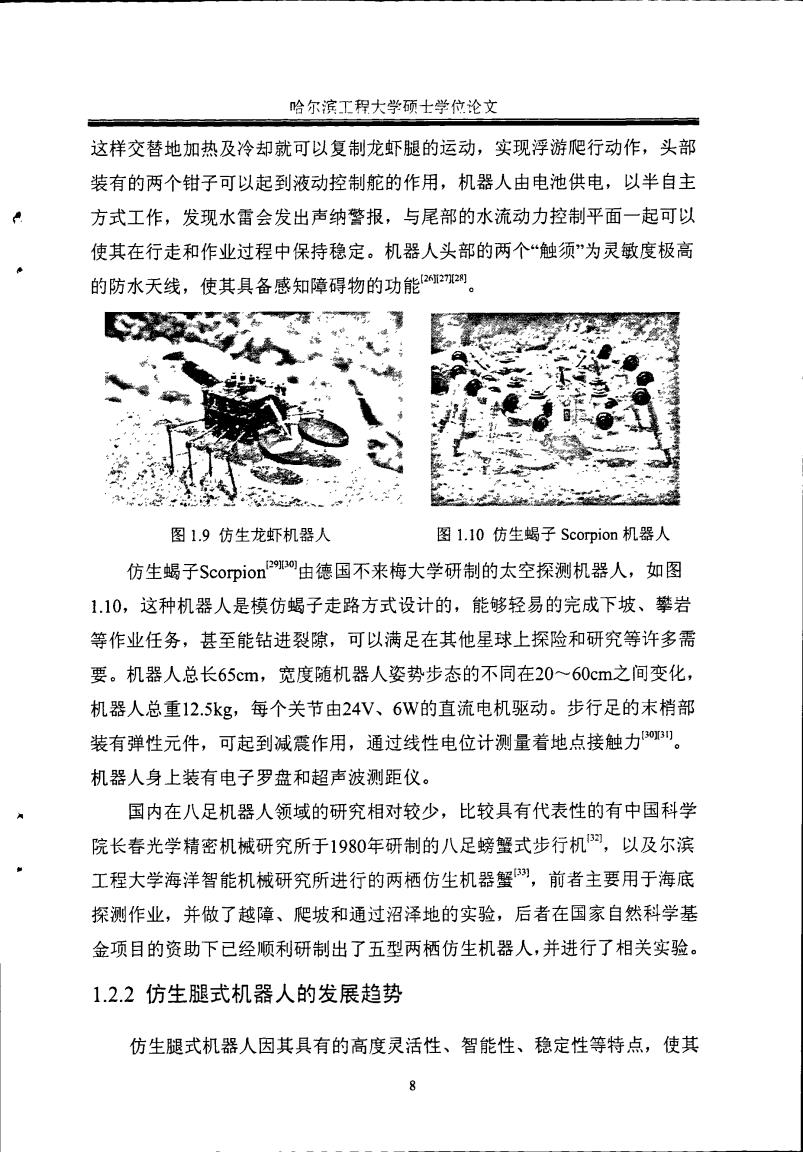
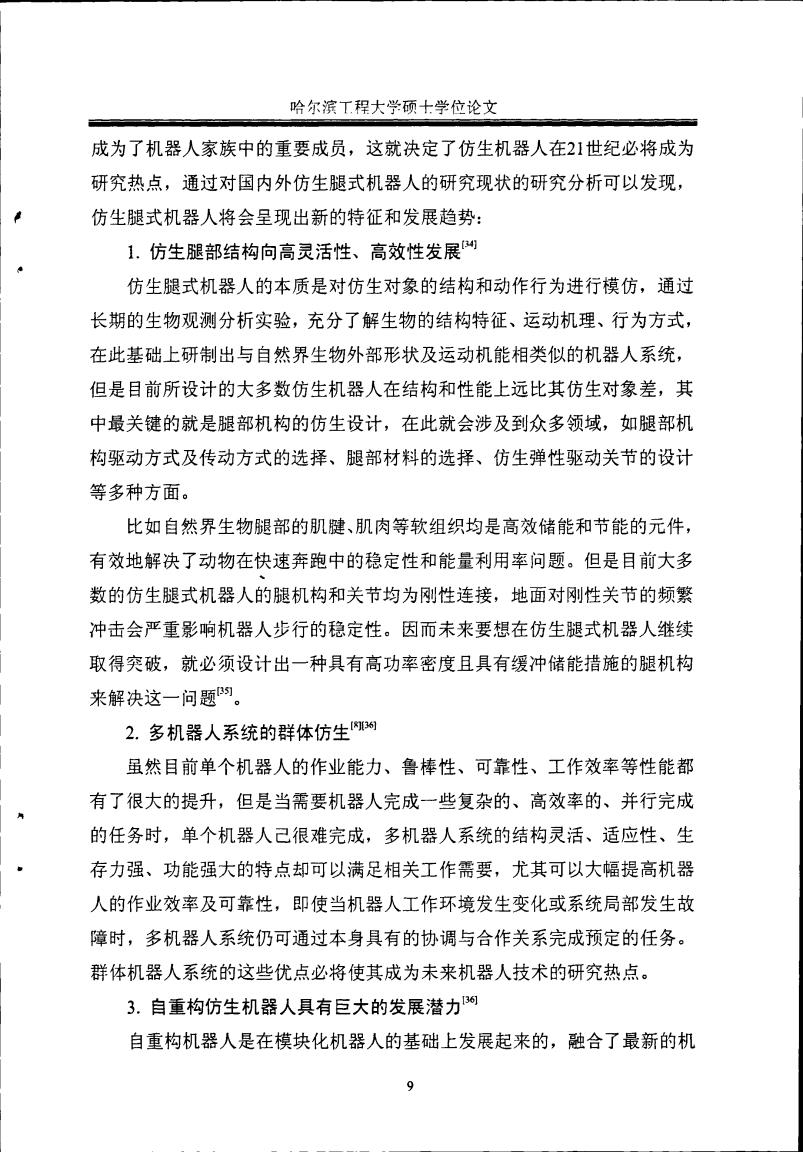
哈尔滨工程大学硕士学位论文 这样交替地加热及冷却就可以复制龙虾腿的运动,实现浮游爬行动作,头部 装有的两个钳子可以起到液动控制舵的作用,机器人由电池供电,以半自主 方式工作,发现水雷会发出声纳警报,与尾部的水流动力控制平面一起可以 使其在行走和作业过程中保持稳定。机器人头部的两个“触须”为灵敏度极高 的防水天线,使其具备感知障碍物的功能2m2。 2按 图1.9仿生龙虾机器人 图1.10仿生蝎子Scorpion机器人 仿生蝎子Scorpion由德国不来梅大学研制的太空探测机器人,如图 1.10,这种机器人是模仿蝎子走路方式设计的,能够轻易的完成下坡、攀岩 等作业任务,甚至能钻进裂隙,可以满足在其他星球上探险和研究等许多需 要。机器人总长65cm,宽度随机器人姿势步态的不同在20~60cm之间变化, 机器人总重12.5kg,每个关节由24V、6W的直流电机驱动。步行足的末梢部 装有弹性元件,可起到减震作用,通过线性电位计测量着地点接触力即。 机器人身上装有电子罗盘和超声波测距仪。 国内在八足机器人领域的研究相对较少,比较具有代表性的有中国科学 院长春光学精密机械研究所于1980年研制的八足螃蟹式步行机网,以及尔滨 工程大学海洋智能机械研究所进行的两栖仿生机器蟹,前者主要用于海底 探测作业,并做了越障、爬坡和通过沼泽地的实验,后者在国家自然科学基 金项目的资助下已经顺利研制出了五型两栖仿生机器人,并进行了相关实验。 1.2.2仿生腿式机器人的发展趋势 仿生腿式机器人因其具有的高度灵活性、智能性、稳定性等特点,使其
哈尔滨工稃大学硕士学位论文 这样交替地加热及冷却就可以复制龙虾腿的运动,实现浮游爬行动作,头部 装有的两个钳子可以起到液动控制舵的作用,机器人由电池供电,以半自主 方式工作,发现水雷会发出声纳警报,与尾部的水流动力控制平面一起可以 使其在行走和作业过程中保持稳定。机器人头部的两个“触须”为灵敏度极高 的防水天线,使其具备感知障碍物的功能㈨例281。 图1.9仿生龙虾机器人 图1.10仿生蝎子Scorpion机器人 仿生蝎子Scorpion嗍301由德国不来梅大学研制的太空探测机器人,如图 1.10,这种机器人是模仿蝎子走路方式设计的,能够轻易的完成下坡、攀岩 等作业任务,甚至能钻进裂隙,可以满足在其他星球上探险和研究等许多需 要。机器人总长65cm,宽度随机器人姿势步态的不同在20,--一60cm之间变化, 机器人总重12.5kg,每个关节由24V、6W的直流电机驱动。步行足的末梢部 装有弹性元件,可起到减震作用,通过线性电位计测量着地点接触力p川p¨。 机器人身上装有电子罗盘和超声波测距仪。 国内在八足机器人领域的研究相对较少,比较具有代表性的有中国科学 院长春光学精密机械研究所于1980年研制的八足螃蟹式步行机p“,以及尔滨 工程大学海洋智能机械研究所进行的两栖仿生机器蟹p”,前者主要用于海底 探测作业,并做了越障、爬坡和通过沼泽地的实验,后者在国家自然科学基 金项目的资助下已经顺利研制出了五型两栖仿生机器人,并进行了相关实验。 1.2.2仿生腿式机器人的发展趋势 仿生腿式机器人因其具有的高度灵活性、智能性、稳定性等特点,使其
哈尔滨T程大学硕十学位论文 成为了机器人家族中的重要成员,这就决定了仿生机器人在21世纪必将成为 研究热点,通过对国内外仿生腿式机器人的研究现状的研究分析可以发现, 仿生腿式机器人将会呈现出新的特征和发展趋势: 1.仿生腿部结构向高灵活性、高效性发展侧 仿生腿式机器人的本质是对仿生对象的结构和动作行为进行模仿,通过 长期的生物观测分析实验,充分了解生物的结构特征、运动机理、行为方式, 在此基础上研制出与自然界生物外部形状及运动机能相类似的机器人系统, 但是目前所设计的大多数仿生机器人在结构和性能上远比其仿生对象差,其 中最关键的就是腿部机构的仿生设计,在此就会涉及到众多领域,如腿部机 构驱动方式及传动方式的选择、腿部材料的选择、仿生弹性驱动关节的设计 等多种方面。 比如自然界生物腿部的肌腱、肌肉等软组织均是高效储能和节能的元件, 有效地解决了动物在快速奔跑中的稳定性和能量利用率问题。但是目前大多 数的仿生腿式机器人的腿机构和关节均为刚性连接,地面对刚性关节的频繁 冲击会严重影响机器人步行的稳定性。因而未来要想在仿生腿式机器人继续 取得突破,就必须设计出一种具有高功率密度且具有缓冲储能措施的腿机构 来解决这一问题啊。 2.多机器人系统的群体仿生购 虽然目前单个机器人的作业能力、鲁棒性、可靠性、工作效率等性能都 有了很大的提升,但是当需要机器人完成一些复杂的、高效率的、并行完成 的任务时,单个机器人己很难完成,多机器人系统的结构灵活、适应性、生 存力强、功能强大的特点却可以满足相关工作需要,尤其可以大幅提高机器 人的作业效率及可靠性,即使当机器人工作环境发生变化或系统局部发生故 障时,多机器人系统仍可通过本身具有的协调与合作关系完成预定的任务。 群体机器人系统的这些优点必将使其成为未来机器人技术的研究热点。 3.自重构仿生机器人具有巨大的发展潜力购 自重构机器人是在模块化机器人的基础上发展起来的,融合了最新的机 9
哈尔滨T程大学硕十学位论文 成为了机器人家族中的重要成员,这就决定了仿生机器人在21世纪必将成为 研究热点,通过对国内外仿生腿式机器人的研究现状的研究分析可以发现, 仿生腿式机器人将会呈现出新的特征和发展趋势: 1.仿生腿部结构向高灵活性、高效性发展Ⅲ1 仿生腿式机器人的本质是对仿生对象的结构和动作行为进行模仿,通过 长期的生物观测分析实验,充分了解生物的结构特征、运动机理、行为方式, 在此基础上研制出与自然界生物外部形状及运动机能相类似的机器人系统, 但是目前所设计的大多数仿生机器人在结构和性能上远比其仿生对象差,其 中最关键的就是腿部机构的仿生设计,在此就会涉及到众多领域,如腿部机 构驱动方式及传动方式的选择、腿部材料的选择、仿生弹性驱动关节的设计 等多种方面。 比如自然界生物腿部的肌腱、肌肉等软组织均是高效储能和节能的元件, 有效地解决了动物在快速奔跑中的稳定性和能量利用率问题。但是目前大多 数的仿生腿式机器人的腿机构和关节均为刚性连接,地面对刚性关节的频繁 冲击会严重影响机器人步行的稳定性。因而未来要想在仿生腿式机器人继续 取得突破,就必须设计出一种具有高功率密度且具有缓冲储能措旌的腿机构 来解决这一问题p引。 2.多机器人系统的群体仿生吲‘蚓 虽然目前单个机器人的作业能力、鲁棒性、可靠性、工作效率等性能都 有了很大的提升,但是当需要机器人完成一些复杂的、高效率的、并行完成 的任务时,单个机器人己很难完成,多机器人系统的结构灵活、适应性、生 存力强、功能强大的特点却可以满足相关工作需要,尤其可以大幅提高机器 人的作业效率及可靠性,即使当机器人工作环境发生变化或系统局部发生故 障时,多机器人系统仍可通过本身具有的协调与合作关系完成预定的任务。 群体机器人系统的这些优点必将使其成为未来机器人技术的研究热点。 3.自重构仿生机器人具有巨大的发展潜力pq 自重构机器人是在模块化机器人的基础上发展起来的,融合了最新的机 9

哈尔滨T程大学硕士学位论文 电、传感器及计算机控制技术,它强调的是自主适应性,即可根据所处环境 和所执行任务的改变来自主改变构型,使机器人本身具有鲁棒性、环境适应性 及自修复能力,尤其适合机器人在非结构化环境中完成不可预知的作业任务, 相比固定结构的多足机器人而言其地形适应能力更强。如可以变成蛇形机器 人穿越管道或者狭小空间,当穿越崎岖地形时可以自组成腿式机器人,因此 在未知和非结构化的危险环境中具有很大优势,如军事侦察、废墟营救、核电 站维修、空间探索等领域。 1.3仿生腿式机器人的关键技术 随着现代科技的快速发展,未来的仿生腿式机器人在智能性、稳定性、 灵活性以及对地面的适应能力等方面将会得到不断提高,但目前大多数的仿 生机器人仍然处于实验室研究阶段,距离实用化还有相当大的距离,综合分 析国内外的研究情况可以发现,未来要想在仿生腿式机器人的研究中取得重 大突破,就必须对以下几方面的关键技术继续深入研究: 1.结构仿生 自然界的生物体经过千百万年的进化,其结构形态已经发展成为最合理、 最稳定、最高效的结构形式,现有的仿生腿式机器人机械结构都是在对其机 体结构和运动特性分析的基础上,通过模仿来复制和再造仿生对象的生物特 征、结构功能及工作原理来实现的,但是在现有的技术条件下,要用机械来 完全地仿制是不可能的,我们所设计的机器人都是对其结构进行简化,然后 建立合理的机构模型,如何使设计出来的机械结构能最大限度的接近其仿生 对象便成为结构仿生需要解决的重要问题,包括仿生驱动关节的设计、驱动 方式及传动方式的设计,腿部结构设计与优化、腿相对于本体的安装位置以 及各腿之间的相对位置等等。 在这些众多问题中,尤其以仿生弹性驱动关节的研究最重要,通过研究 我们可以发现,通过模拟生物关节的结构和驱动原理而设计的仿生关节驱动 器能够使机器人在性能上更加地接近其仿生对象,而且大大地简化了其控制 10
哈尔滨T程大学硕七学位论文 电、传感器及计算机控制技术,它强调的是自主适应性,即可根据所处环境 和所执行任务的改变来自主改变构型,使机器人本身具有鲁棒性、环境适应性 及自修复能力,尤其适合机器人在非结构化环境中完成不可预知的作业任务, 相比固定结构的多足机器人而言其地形适应能力更强。如可以变成蛇形机器 人穿越管道或者狭小空间,当穿越崎岖地形时可以自组成腿式机器人,因此 在未知和非结构化的危险环境中具有很大优势,如军事侦察、废墟营救、核电 站维修、空间探索等领域。 1.3仿生腿式机器人的关键技术 随着现代科技的快速发展,未来的仿生腿式机器人在智能性、稳定性、 灵活性以及对地面的适应能力等方面将会得到不断提高,但目前大多数的仿 生机器人仍然处于实验室研究阶段,距离实用化还有相当大的距离,综合分 析国内外的研究情况可以发现,未来要想在仿生腿式机器人的研究中取得重 大突破,就必须对以下几方面的关键技术继续深入研究: 1.结构仿生㈣ 自然界的生物体经过千百万年的进化,其结构形态已经发展成为最合理、 最稳定、最高效的结构形式,现有的仿生腿式机器人机械结构都是在对其机 体结构和运动特性分析的基础上,通过模仿来复制和再造仿生对象的生物特 征、结构功能及工作原理来实现的,但是在现有的技术条件下,要用机械来 完全地仿制是不可能的,我们所设计的机器人都是对其结构进行简化,然后 建立合理的机构模型,如何使设计出来的机械结构能最大限度的接近其仿生 对象便成为结构仿生需要解决的重要问题,包括仿生驱动关节的设计、驱动 方式及传动方式的设计,腿部结构设计与优化、腿相对于本体的安装位置以 及各腿之间的相对位置等等。 在这些众多问题中,尤其以仿生弹性驱动关节的研究最重要,通过研究 我们可以发现,通过模拟生物关节的结构和驱动原理而设计的仿生关节驱动 器能够使机器人在性能上更加地接近其仿生对象,而且大大地简化了其控制 10

哈尔滨工程大学硕士学位论文 系统,尤其以波士顿动力公司研制的“大狗”机器人最为突出,该机器人使用 采用一种特殊的仿生弹性驱动关节,这些关节具有普通关节驱动装置难以企 及的驱动性能,而且结构简单紧凑。 2.感知与控制仿生3) 当自然界的生物面对危险时,能够快速分析出面临的危险情况,并在最 短的时间内由大脑发出指令来做出逃避或进攻动作,生物的这种无与伦比的 信息处理能力正是现代仿生机器人所要追求的。为了达到这一目的,仿生机 器人往住需要装备很多传感器,使其具备包括视觉、听觉、嗅觉、接近觉、 触觉、力觉等众多的感觉在内的强大感知能力,但是如何将这些多个同一类 型或不同类型的传感器提供的敏感信息融合在一起,并且消除多传感器信息 之间可能存在的冗余和矛盾便成为了我们需要解决的重要问题,只有很好的 解决了这一问题才能提高机器人反应的快速性和准确性,确保为控制系统作 出的决策提供正确的信息。 如何使控制系统在接到传感器的反馈信息后,产生各种运动模态下的最 优控制参数便成为了下一个重要问题,为了解决复杂的高难度任务,使机器 人身体能够完美地协调配合,就必须设计出一种能够与其相适应的核心控制 模块,并探讨出高效且容易实现的运动控制算法,例如近些年研究的能产生 节律运动的CPG等方法。 3.能源问题9 要实现仿生机器人完全智能化,除了行为仿生自治外还必须解决能源问 题,要想使机器人能够在相对广阔的范围内长时间工作,就必须携带大容量 的机载电源,并对其进行合理的管理和利用,但是受电池的质量、充电工艺 等众多因素的影响,使机器人储存的能量大大受限,因此在进行新能源管理 技术的开发和研究的同时,还要对其结构进行改进,使能耗最小化,同时还 ·要研究能源自治技术,使其能够从周围环境中提取能量,如太阳能、生物能 等等,只有这样才能满足仿生机器人长时间、大范围、多任务的作业要求。 1)
哈尔滨丁稃大学硕士学位论文 系统,尤其以波士顿动力公司研制的“大狗”机器人最为突出,该机器人使用 采用一种特殊的仿生弹性驱动关节,这些关节具有普通关节驱动装置难以企 及的驱动性能,而且结构简单紧凑。 2.感知与控制仿生吲3叼 当自然界的生物面对危险时,能够快速分析出面临的危险情况,并在最 短的时间内由大脑发出指令来做出逃避或进攻动作,生物的这种无与伦比的 信息处理能力正是现代仿生机器人所要追求的。为了达到这一目的,仿生机 器人往往需要装备很多传感器,使其具备包括视觉、听觉、嗅觉、接近觉、 触觉、力觉等众多的感觉在内的强大感知能力,但是如何将这些多个同一类 型或不同类型的传感器提供的敏感信息融合在一起,并且消除多传感器信息 之间可能存在的冗余和矛盾便成为了我们需要解决的重要问题,只有很好的 解决了这一问题才能提高机器人反应的快速性和准确性,确保为控制系统作 出的决策提供正确的信息。 如何使控制系统在接到传感器的反馈信息后,产生各种运动模态下的最 优控制参数便成为了下一个重要问题,为了解决复杂的高难度任务,使机器 人身体能够完美地协调配合,就必须设计出一种能够与其相适应的核心控制 模块,并探讨出高效且容易实现的运动控制算法,例如近些年研究的能产生 节律运动的CPG等方法。 3.能源问题‘销”91 要实现仿生机器人完全智能化,除了行为仿生自治外还必须解决能源问 题,要想使机器人能够在相对广阔的范围内长时间工作,就必须携带大容量 的机载电源,并对其进行合理的管理和利用,但是受电池的质量、充电工艺 等众多因素的影响,使机器人储存的能量大大受限,因此在进行新能源管理 技术的开发和研究的同时,还要对其结构进行改进,使能耗最小化,同时还 ·要研究能源自治技术,使其能够从周围环境中提取能量,如太阳能、生物能 等等,只有这样才能满足仿生机器人长时间、大范围、多任务的作业要求