哈尔滨丁程大学硕十学位论文 由于八腿机器人腿数较多,步态的种类也更多,其对地形的适应能力会得到 大幅度的提升,但是其协调和控制的复杂程度也大大增加,如何协调好这两 个相互矛盾的问题成为了机器人专家研究的重要目标。 本课题来源于国家自然科学基金项目“多足仿生机器蟹复杂地貌行走方 法研究”。该项目的研究目标是设计一种新型仿生机器蟹结构,使设计完成的 仿生机器蟹可以通过一段与其结构尺寸相类似的自然生物可以通过而轮式和 履带车辆难以通过的复杂道路,同时在通过时保持与自然生物相类似的步行 效率和步行速度。 1.2仿生腿式机器人的研究现状及发展趋势 在仿生机器人的设计过程中,针对不同的作业对象和作业环境必须选择 不同的仿生对象,其中最重要的一个机械设计参数就是腿的数目的选择。腿 的数目直接影响着仿生机器人的稳定性、灵活性、轻动性、关节控制的质量 以及机器人可能产生的步态种类。一般来说,步态的种类可以随着腿的数目、 增加而增加,而多足机器人对复杂地貌的适应能力又取决于步态的种类,所 以针对相应的作业环境和作业任务,选择合适的腿数目是非常重要。在本 章节中,我们将围绕腿的数目这个参数来简要的介绍一下国内外仿生腿式机 器人的发展现状。 1.2.1国内外仿生腿式机器人的发展状况 1.单腿机器人 单腿跳跃机器人可以看作是多腿跑动机器人在动态稳定行走时的简化模 型。它在运动时只需要一系列的单点接触,就可以经受最粗糙的地形,动态 地跨过比它步幅大的沟隙。在单腿机器人系统的研究过程中,Raibert,Hyon, Buehler,Papadopoulos,Zeglin,Burdick等都设计了原理样机,并进行了相 关的深入研究,比较具有代表性的有Raibert和Zeglin共同研制的Uniroo"” 以及Hyon研制的仿袋鼠机器人“Kenken'”,这两种机器人都能够成功实现 2
哈尔滨-下程大学硕十学位论文 由于八腿机器人腿数较多,步态的种类也更多,其对地形的适应能力会得到 大幅度的提升,但是其协调和控制的复杂程度也大大增加,如何协调好这两 个相互矛盾的问题成为了机器人专家研究的重要目标。 本课题来源于国家自然科学基金项目“多足仿生机器蟹复杂地貌行走方 法研究”。该项目的研究目标是设计一种新型仿生机器蟹结构,使设计完成的 仿生机器蟹可以通过一段与其结构尺寸相类似的自然生物可以通过而轮式和 履带车辆难以通过的复杂道路,同时在通过时保持与自然生物相类似的步行 效率和步行速度。 1.2仿生腿式机器人的研究现状及发展趋势 在仿生机器人的设计过程中,针对不同的作业对象和作业环境必须选择 不同的仿生对象,其中最重要的一个机械设计参数就是腿的数目的选择。腿 的数目直接影响着仿生机器人的稳定性、灵活性、轻动性、关节控制的质量 以及机器人可能产生的步态种类。一般来说,步态的种类可以随着腿的数目 ’ 增加而增加,而多足机器人对复杂地貌的适应能力又取决于步态的种类,所 以针对相应的作业环境和作业任务,选择合适的腿数目是非常重要”“101。在本 章节中,我们将围绕腿的数目这个参数来简要的介绍一下国内外仿生腿式机 器人的发展现状。 1.2.1国内外仿生腿式机器人的发展状况 1.单腿机器人 单腿跳跃机器人可以看作是多腿跑动机器人在动态稳定行走时的简化模 型。它在运动时只需要一系列的单点接触,就可以经受最粗糙的地形,动态 地跨过比它步幅大的沟隙。在单腿机器人系统的研究过程中,Raibert,Hyon, Buehler,Papadopoulos,Zeglin,Burdick等都设计了原理样机,并进行了相 关的深入研究,比较具有代表性的有Raibert和Zeglin共同研制的“Uniroo” 以及Hyon研制的仿袋鼠机器人“Kenken”D4],这两种机器人都能够成功实现 2
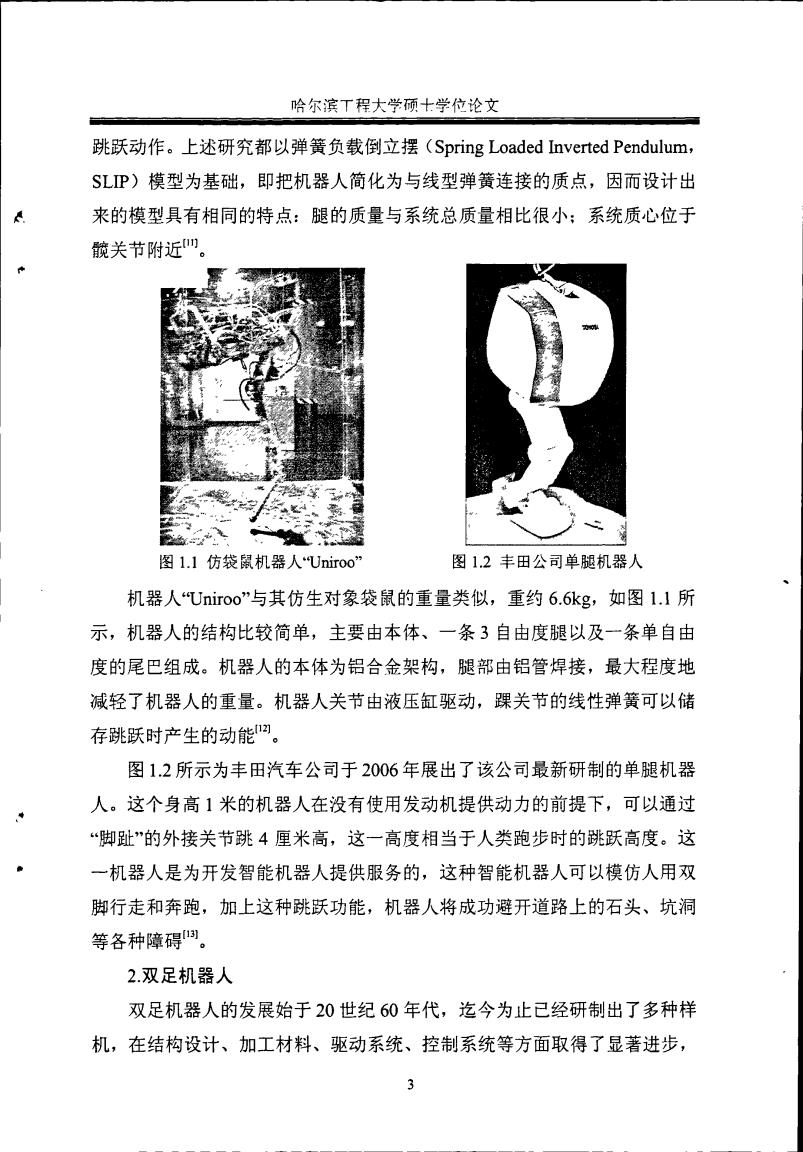
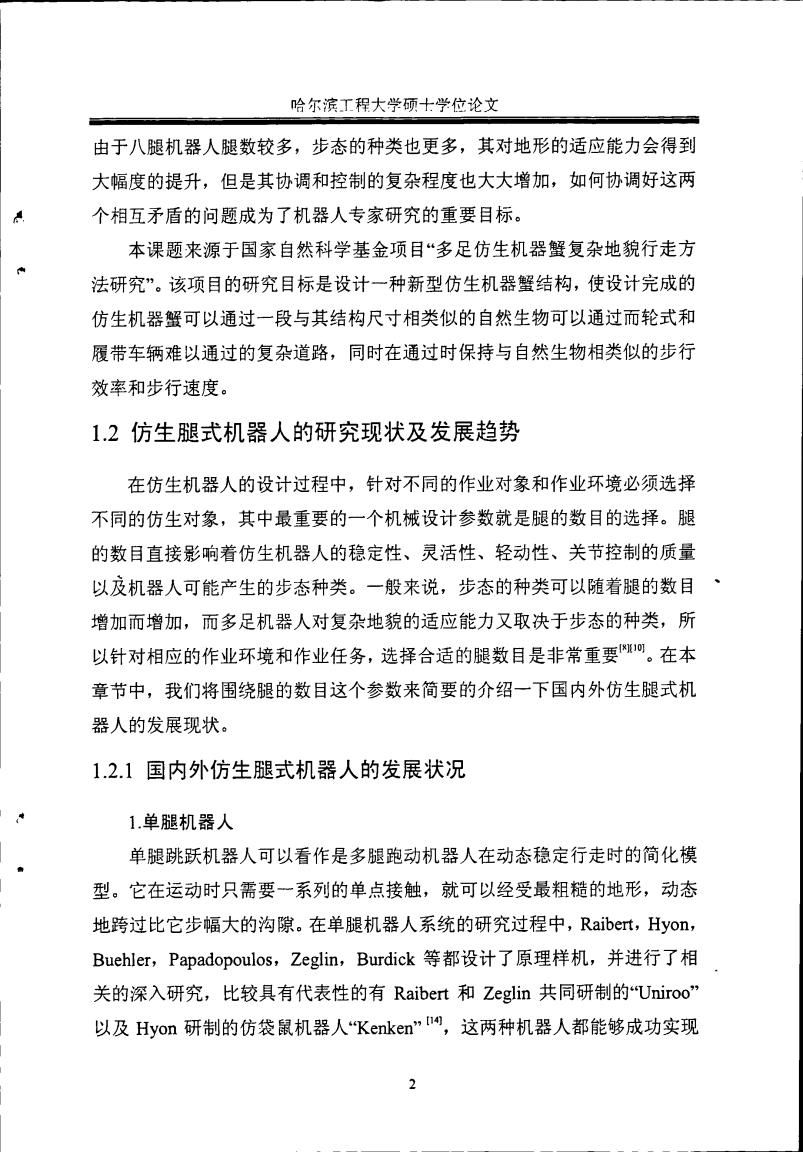
哈尔滨T程大学硕七学位论文 跳跃动作。上述研究都以弹簧负载倒立摆(Spring Loaded Inverted Pendulum, SLP)模型为基础,即把机器人简化为与线型弹簧连接的质点,因而设计出 来的模型具有相同的特点:腿的质量与系统总质量相比很小:系统质心位于 髋关节附近四。 图1.1仿袋鼠机器人Uniroo” 图1.2丰田公司单腿机器人 机器人Uniroo'”与其仿生对象袋鼠的重量类似,重约6.6kg,如图1.1所 示,机器人的结构比较简单,主要由本体、一条3自由度腿以及一条单自由 度的尾巴组成。机器人的本体为铝合金架构,腿部由铝管焊接,最大程度地 减轻了机器人的重量。机器人关节由液压缸驱动,踝关节的线性弹簧可以储 存跳跃时产生的动能。 图1.2所示为丰田汽车公司于2006年展出了该公司最新研制的单腿机器 人。这个身高1米的机器人在没有使用发动机提供动力的前提下,可以通过 “脚趾”的外接关节跳4厘米高,这一高度相当于人类跑步时的跳跃高度。这 一机器人是为开发智能机器人提供服务的,这种智能机器人可以模仿人用双 脚行走和奔跑,加上这种跳跃功能,机器人将成功避开道路上的石头、坑洞 等各种障碍。 2.双足机器人 双足机器人的发展始于20世纪60年代,迄今为止已经研制出了多种样 机,在结构设计、加工材料、驱动系统、控制系统等方面取得了显著进步
哈尔滨T程大学硕十学位论文 跳跃动作。上述研究都以弹簧负载倒立摆(Spring Loaded Inverted Pendulum, SLIP)模型为基础,即把机器人简化为与线型弹簧连接的质点,因而设计出 来的模型具有相同的特点:腿的质量与系统总质量相比很小;系统质心位于 髋关节附近【¨3。 图1.1仿袋鼠机器人“Uniroo” 图1.2丰田公司单腿机器人 机器人‘'Uniroo”与其仿生对象袋鼠的重量类似,重约6.6kg,如图1.1所 示,机器人的结构比较简单,主要由本体、一条3自由度腿以及一条单自由 度的尾巴组成。机器人的本体为铝合金架构,腿部由铝管焊接,最大程度地 减轻了机器人的重量。机器人关节由液压缸驱动,踝关节的线性弹簧可以储 存跳跃时产生的动能¨21。 图1.2所示为丰田汽车公司于2006年展出了该公司最新研制的单腿机器 人。这个身高1米的机器人在没有使用发动机提供动力的前提下,可以通过 “脚趾”的外接关节跳4厘米高,这一高度相当于人类跑步时的跳跃高度。这 一机器人是为开发智能机器人提供服务的,这种智能机器人可以模仿人用双 脚行走和奔跑,加上这种跳跃功能,机器人将成功避开道路上的石头、坑洞 等各种障碍¨引。 2.双足机器人 双足机器人的发展始于20世纪60年代,迄今为止已经研制出了多种样 机,在结构设计、加工材料、驱动系统、控制系统等方面取得了显著进步
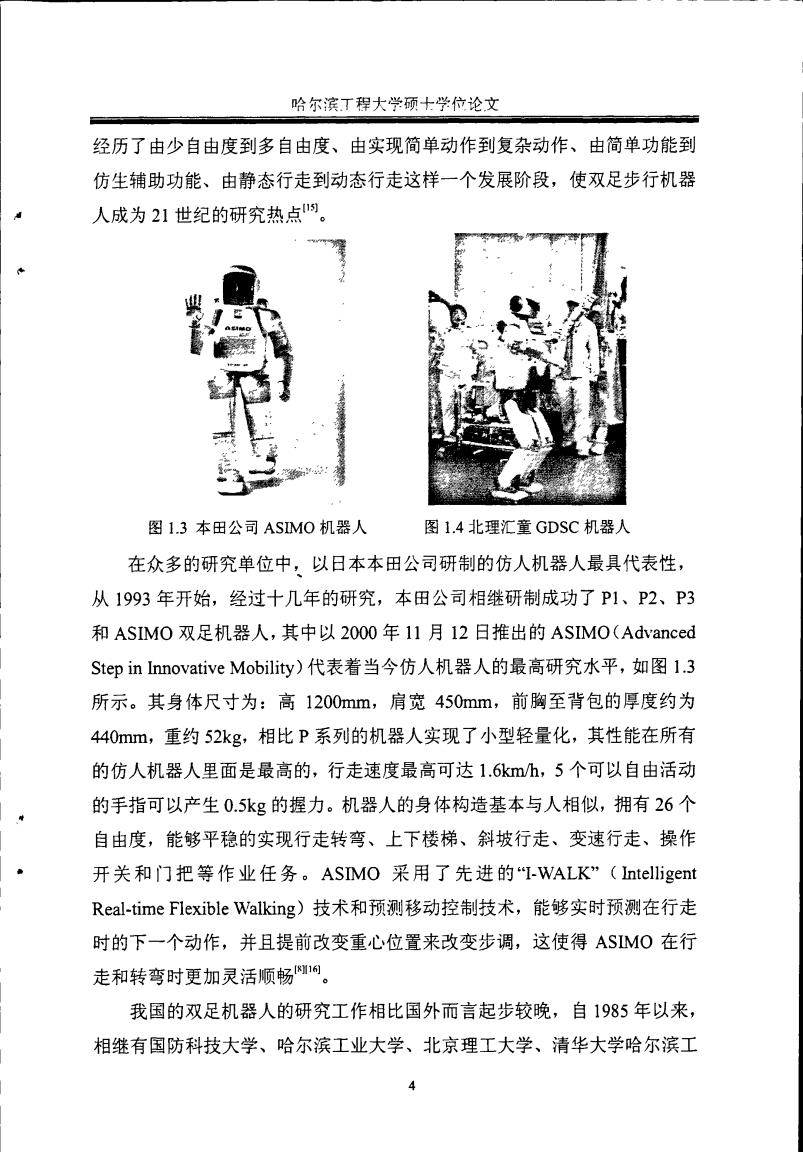
哈尔滨T程大学硕十学位论文 经历了由少自由度到多自由度、由实现简单动作到复杂动作、由简单功能到 仿生辅助功能、由静态行走到动态行走这样一个发展阶段,使双足步行机器 人成为21世纪的研究热点。 图1.3本田公司ASMO机器人 图1.4北理汇童GDSC机器人 在众多的研究单位中,以日本本田公司研制的仿人机器人最具代表性, 从1993年开始,经过十几年的研究,本田公司相继研制成功了P1、P2、P3 和ASIM0双足机器人,其中以2000年11月12日推出的ASIMO(Advanced Step in Innovative Mobility)代表着当今仿人机器人的最高研究水平,如图I.3 所示。其身体尺寸为:高1200mm,肩宽450mm,前胸至背包的厚度约为 440mm,重约52kg,相比P系列的机器人实现了小型轻量化,其性能在所有 的仿人机器人里面是最高的,行走速度最高可达1.6km/h,5个可以自由活动 的手指可以产生0.5kg的握力。机器人的身体构造基本与人相似,拥有26个 自由度,能够平稳的实现行走转弯、上下楼梯、斜坡行走、变速行走、操作 开关和门把等作业任务。ASMO采用了先进的“I-WALK”(ntelligent Real-time Flexible Walking)技术和预测移动控制技术,能够实时预测在行走 时的下一个动作,并且提前改变重心位置来改变步调,这使得ASMO在行 走和转弯时更加灵活顺畅1%。 我国的双足机器人的研究工作相比国外而言起步较晚,自1985年以来, 相继有国防科技大学、哈尔滨工业大学、北京理工大学、清华大学哈尔滨工
哈尔滨T稗大学硕+学伊论文 经历了由少自由度到多自由度、由实现简单动作到复杂动作、由简单功能到 仿生辅助功能、由静态行走到动态行走这样一个发展阶段,使双足步行机器 人成为21世纪的研究热点Ⅲ1。 图1-3本田公司ASIMO机器人 图1.4北理汇童GDSC机器人 在众多的研究单位中,以日本本田公司研制的仿人机器人最具代表性, 从1993年开始,经过十几年的研究,本田公司相继研制成功了P1、P2、P3 和ASIMO双足机器人,其中以2000年11月12日推出的ASIMO(Advanced Step in Innovative Mobility)代表着当今仿人机器人的最高研究水平,如图1.3 所示。其身体尺寸为:高1200mm,肩宽450mm,前胸至背包的厚度约为 440mm,重约52kg,相比P系列的机器人实现了小型轻量化,其性能在所有 的仿人机器人里面是最高的,行走速度最高可达1.6km/h,5个可以自由活动 的手指可以产生0.5kg的握力。机器人的身体构造基本与人相似,拥有26个 自由度,能够平稳的实现行走转弯、上下楼梯、斜坡行走、变速行走、操作 开关和门把等作业任务。ASIMO采用了先进的“I-WALK”(Intelligent Real.time Flexible Walking)技术和预测移动控制技术,能够实时预测在行走 时的下一个动作,并且提前改变重心位置来改变步调,这使得ASIMO在行 走和转弯时更加灵活顺畅¨“m1。 我国的双足机器人的研究工作相比国外而言起步较晚,自1985年以来, 相继有国防科技大学、哈尔滨工业大学、北京理工大学、清华大学哈尔滨工 4
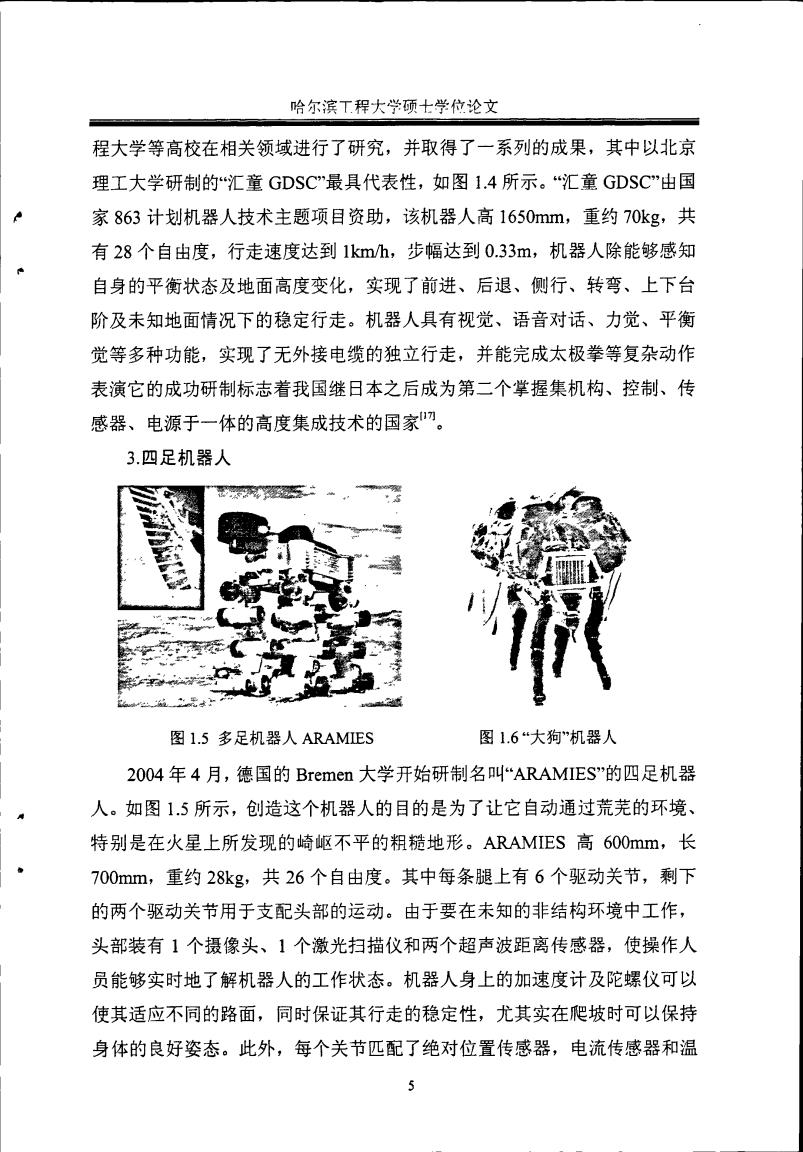
哈尔滨工稈大学硕士学位论文 程大学等高校在相关领域进行了研究,并取得了一系列的成果,其中以北京 理工大学研制的“汇童GDSC”最具代表性,如图1.4所示。“汇童GDSC”由国 家863计划机器人技术主题项目资助,该机器人高1650mm,重约70kg,共 有28个自由度,行走速度达到1km/h,步幅达到0.33m,机器人除能够感知 自身的平衡状态及地面高度变化,实现了前进、后退、侧行、转弯、上下台 阶及未知地面情况下的稳定行走。机器人具有视觉、语音对话、力觉、平衡 觉等多种功能,实现了无外接电缆的独立行走,并能完成太极拳等复杂动作 表演它的成功研制标志着我国继日本之后成为第二个掌握集机构、控制、传 感器、电源于一体的高度集成技术的国家”。 3.四足机器人 图1.5多足机器人ARAMIES 图1.6“大狗”机器人 2004年4月,德国的Bremen大学开始研制名叫“ARAMIES”的四足机器 人。如图1.5所示,创造这个机器人的目的是为了让它自动通过荒芜的环境、 特别是在火星上所发现的崎岖不平的粗糙地形。ARAMIES高600mm,长 700mm,重约28kg,共26个自由度。其中每条腿上有6个驱动关节,剩下 的两个驱动关节用于支配头部的运动。由于要在未知的非结构环境中工作, 头部装有1个摄像头、1个激光扫描仪和两个超声波距离传感器,使操作人 员能够实时地了解机器人的工作状态。机器人身上的加速度计及陀螺仪可以 使其适应不同的路面,同时保证其行走的稳定性,尤其实在爬坡时可以保持 身体的良好姿态。此外,每个关节匹配了绝对位置传感器,电流传感器和温
哈尔滨T稗大学硕士学位论文 程大学等高校在相关领域进行了研究,并取得了一系列的成果,其中以北京 理工大学研制的“汇童GDSC”最具代表性,如图1.4所示。“汇童GDSC”由国 家863计划机器人技术主题项目资助,该机器人高1650mm,重约70kg,共 有28个自由度,行走速度达到lkmYn,步幅达到0.33m,机器人除能够感知 自身的平衡状态及地面高度变化,实现了前进、后退、侧行、转弯、上下台 阶及未知地面情况下的稳定行走。机器人具有视觉、语音对话、力觉、平衡 觉等多种功能,实现了无外接电缆的独立行走,并能完成太极拳等复杂动作 表演它的成功研制标志着我国继日本之后成为第二个掌握集机构、控制、传 感器、电源于一体的高度集成技术的国家¨”。 3.四足机器人 阉l饕∑”l f|霸- 图1.5多足机器人ARAMIES 图1.6“大狗”机器人 2004年4月,德国的Bremen大学开始研制名叫“ARAMIES”的四足机器 人。如图1.5所示,创造这个机器人的目的是为了让它自动通过荒芜的环境、 特别是在火星上所发现的崎岖不平的粗糙地形。ARAMIES高600mm,长 700mm,重约28kg,共26个自由度。其中每条腿上有6个驱动关节,剩下 的两个驱动关节用于支配头部的运动。由于要在未知的非结构环境中工作, 头部装有1个摄像头、1个激光扫描仪和两个超声波距离传感器,使操作人 员能够实时地了解机器人的工作状态。机器人身上的加速度计及陀螺仪可以 使其适应不同的路面,同时保证其行走的稳定性,尤其实在爬坡时可以保持 身体的良好姿态。此外,每个关节匹配了绝对位置传感器,电流传感器和温
哈尔滨丁程大学硕士学位论文 度传感器。机器人每条腿上的机械脚爪能够提供足够的附着力,实现高达70 度大坡度的楼梯攀爬。 2006年7月,波士顿动力学工程公司(Boston Dynamics)展示了最新的 四足机器人一“BigD0g10,如图1.6所示。该项目由美国国防部高级研究 计划署(DARPA)资助,希望其可以在那些军车难以出入的险要地势上为士兵 运送弹药、食物和其他物品。“大狗”长1米,高70厘米,重量为75kg,行 进速度可达到7千米/小时,可以攀越35度的斜坡,它可以承载40kg的装备。 四条腿完全模仿动物的四肢设计,内部安装有特制的减震装置,每条腿有三 个靠传动装置提供动力的关节,并有一个“弹性”关节,这些关节由一个机载 计算机处理器控制。该机器人的动力来自一部带有液压系统的单缸两冲程汽 油发动机,由陀螺仪和其他传感器帮助机载计算机规划每一步的运动。机器 人依靠感觉来保持身体的平衡,如果有一条腿比预期更早地碰到了地面,计算 机就会认为它可能踩到了岩石或是山坡,相应地调节自己的步伐。 4.六足机器人 为了尽可能的减少宇航员在恶劣的太空环境中工作时可能受到的伤害, 降低成本,未来急需研制相关的空间机器人来代替宇航员进行太空作业,美 国国家航空和宇宙航行局(NASA)下属的喷气推进实验室于2005年研制成 功了一种六腿机器人Lemur一Limbed Excursion Mechanical Utility Robot,将 承担起对空间站外部维修、检测和装配组件等任务2四。Lemur目前共研制 出两个型号,最新的Lemur lia可以帮助字航员在太空中建设较大的建筑物。 图1.7所示为Lemur lia正在一个望远镜模型片段上作业。为了增加机器人的 柔韧性、稳定性和实用性,Lemur的六个机械臂模仿螃蟹和章鱼的结构和运 动特点设计的,机械臂上装备有可折叠工具,每条机械臂都可以对相关仪器 设备的状态进行诊断。虽然机器人重约12kg,但在太空中的微重力下,Lemur 通过任意一条机械臂将其固定在空间站的表面。目前Lemur已经成功地通过 了地面实验,比如借助配备的照明灯,它不但可以在黑暗的条件下准确地拧 紧镙栓,甚至还可以“拿"着钢笔写字。正因为其良好的性能,Lemur还有可 6
哈尔滨工稃大学硕十学伊论文 度传感器。机器人每条腿上的机械脚爪能够提供足够的附着力,实现高达70 度大坡度的楼梯攀爬”81。 2006年7月,波士顿动力学工程公司(Boston Dynamics)展示了最新的 四足机器人-‘‘Big Dog’,¨91忙01,如图1.6所示。该项目由美国国防部高级研究 计划署(DARPA)资助,希望其可以在那些军车难以出入的险要地势上为士兵 运送弹药、食物和其他物品。“大狗”长1米,高70厘米,重量为75kg,行 进速度可达到7千米/4,时,可以攀越35度的斜坡,它可以承载40kg的装备。 四条腿完全模仿动物的四肢设计,内部安装有特制的减震装置,每条腿有三 个靠传动装置提供动力的关节,并有一个“弹性”关节,这些关节由一个机载 计算机处理器控制。该机器人的动力来自一部带有液压系统的单缸两冲程汽 油发动机,由陀螺仪和其他传感器帮助机载计算机规划每一步的运动。机器 人依靠感觉来保持身体的平衡,如果有一条腿比预期更早地碰到了地面,计算 机就会认为它可能踩到了岩石或是山坡,相应地调节自己的步伐。 4.六足机器人 为了尽可能的减少宇航员在恶劣的太空环境中工作时可能受到的伤害, 降低成本,未来急需研制相关的空间机器人来代替宇航员进行太空作业,美 国国家航空和宇宙航行局(NASA)下属的喷气推进实验室于2005年研制成 功了一种六腿机器人Lemur--Limbed Excursion Mechanical Utility Robot,将 承担起对空间站外部维修、检测和装配组件等任务口”口21。Lemur目前共研制 出两个型号,最新的Lemur lia可以帮助宇航员在太空中建设较大的建筑物。 图1.7所示为Lemur lia正在一个望远镜模型片段上作业。为了增加机器人的 柔韧性、稳定性和实用性,Lemur的六个机械臂模仿螃蟹和章鱼的结构和运 动特点设计的,机械臂上装备有可折叠工具,每条机械臂都可以对相关仪器 设备的状态进行诊断。虽然机器人重约12kg,但在太空中的微重力下,Lemur 通过任意一条机械臂将其固定在空间站的表面。目前Lemur已经成功地通过 了地面实验,比如借助配备的照明灯,它不但可以在黑暗的条件下准确地拧 紧镙栓,甚至还可以“拿”着钢笔写字。正因为其良好的性能,Lemur还有可 6