
房事2黄大学 GUANGDONG UNIVERSITY OF TECHNOLOGY 关节臂式测量机 9000
关节臂式测量机
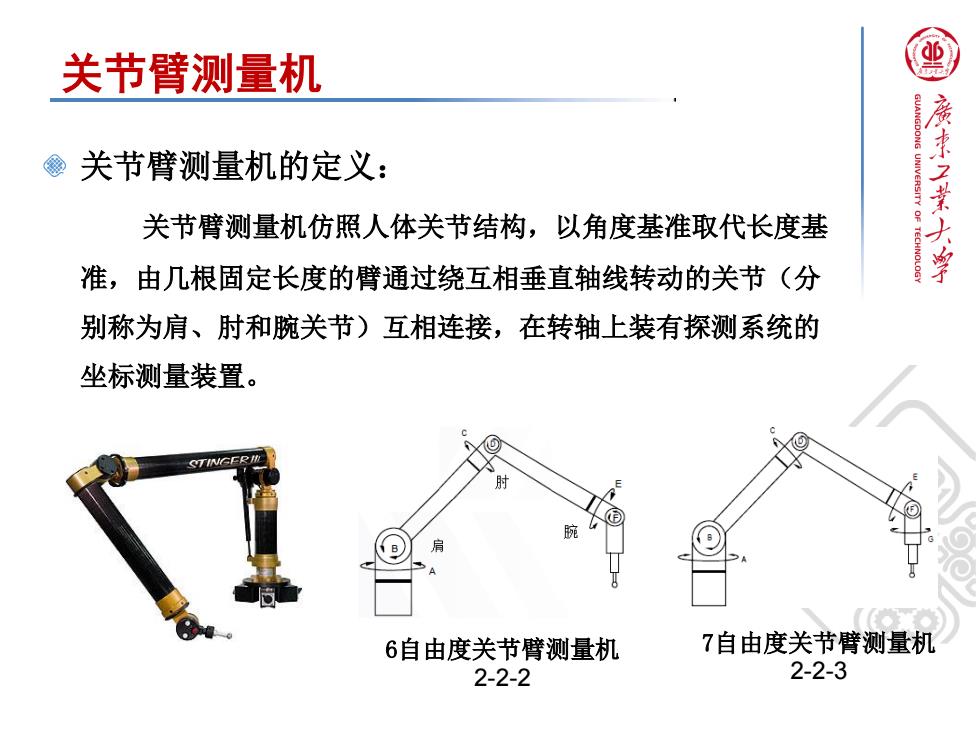
关节臂测量机 @关节臂测量机的定义: 关节臂测量机仿照人体关节结构,以角度基准取代长度基 工大学 准,由几根固定长度的臂通过绕互相垂直轴线转动的关节(分 别称为肩、肘和腕关节)互相连接,在转轴上装有探测系统的 坐标测量装置。 6自由度关节臂测量机 7自由度关节臂测量机 2-2-2 2-2-3
关节臂测量机的定义: 关节臂测量机仿照人体关节结构,以角度基准取代长度基 准,由几根固定长度的臂通过绕互相垂直轴线转动的关节(分 别称为肩、肘和腕关节)互相连接,在转轴上装有探测系统的 坐标测量装置。 6自由度关节臂测量机 2-2-2 7自由度关节臂测量机 2-2-3 关节臂测量机
关节臂测量机 与传统的三坐标测量机相比 关节臂式坐标测量机具有体积小、质量轻、便于携带、测 量灵活、测量空间大、环境适应性强、成本低等优点。 随着近年来的不断发展,该产品已经具有三坐标测量、在 线检测、逆向工程、快速成型、扫描检测、弯管测量等多种功 能。 一般来说关节臂测量机的精度比传统的框架式三坐标测量 机精度要略低,精度一般为10ym级以上,加上只能手动,所 以选用时要注意应用场合
与传统的三坐标测量机相比 关节臂式坐标测量机具有体积小、质量轻、便于携带、测 量灵活、测量空间大、环境适应性强、成本低等优点。 随着近年来的不断发展,该产品已经具有三坐标测量、在 线检测、逆向工程、快速成型、扫描检测、弯管测量等多种功 能。 一般来说关节臂测量机的精度比传统的框架式三坐标测量 机精度要略低,精度一般为10μ m级以上,加上只能手动,所 以选用时要注意应用场合。 关节臂测量机
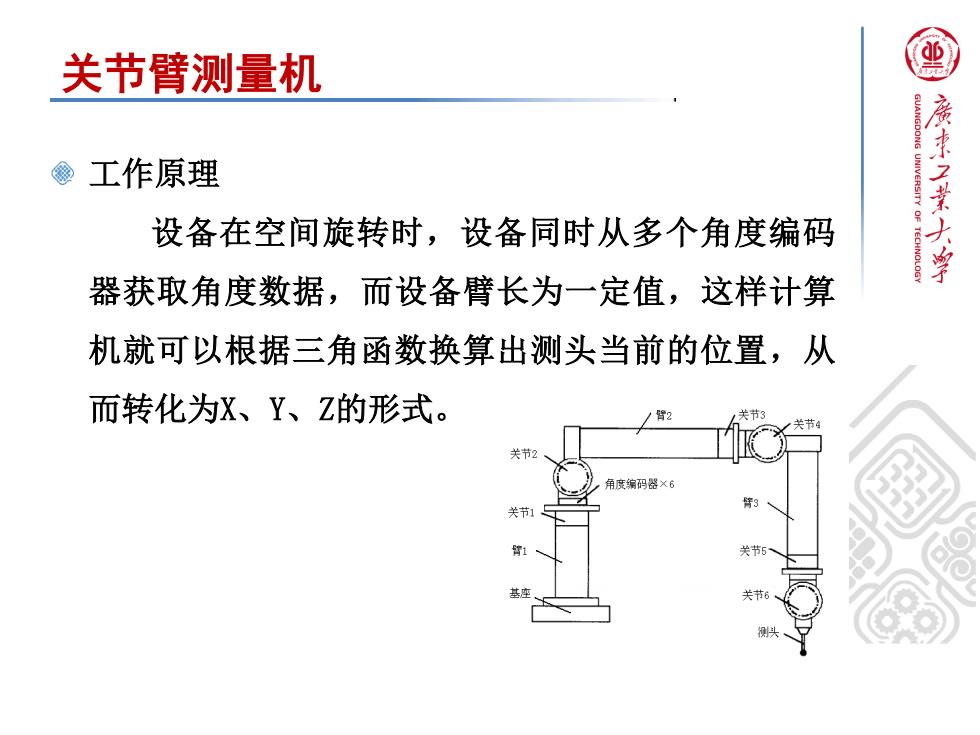
关节臂测量机 @工作原理 设备在空间旋转时,设备同时从多个角度编码 器获取角度数据,而设备臂长为一定值,这样计算 机就可以根据三角函数换算出测头当前的位置,从 而转化为X、Y、Z的形式。 臂2 关节4 关节2 角度编码器×6 关节】 臂1 基座 关节6
工作原理 设备在空间旋转时,设备同时从多个角度编码 器获取角度数据,而设备臂长为一定值,这样计算 机就可以根据三角函数换算出测头当前的位置,从 而转化为X、Y、Z的形式。 关节臂测量机

关节臂测量机 @测头 >接触式测头 庚京工老大学 >扫描测头 Scarorks
测头 接触式测头 扫描测头 关节臂测量机