正确采集和整理实验数据,对实验数据和结果进行分析和解释,并与理论分析进 行比较,得出合理有效的结论。 JZLTS-9:现代工具使用能力 能使用全数字仿真工具实现交直流调速系统仿真。 JZLTS-10:自学与自律能力 能保证出勤,按时完成作业,按时线上学习任务和课程自学内容,善于时间 管理。 思政目标: JZLTS-11:课程思政与课程教学高质量融合 结合“交直流调速系统”课程的特点,从理论与实践相结合、能力培养和服 务社会三个方面全面推进课程思政建设,深入挖掘思政元素,实现课程思政与课 程教学的高质量融合。从理论与实践结合角度,提出“四维一体”的创新教学模 式,设计全数字仿真、半实物仿真以及全实物代码生成实验,其最终的目的都是 实现对理论的实验验证。课程环节始终坚持理论与实践的辩证统一思想,充分体 现了马克思主义哲学中的实践核心观点。从能力培养角度,课程教学全面培养学 生解决复杂电气工程问题的能力,提升创新和创造能力。结合当前国际形势和行 业发展现状,学生要肩负起实现中华民族伟大复兴的历史使命,努力提高综合素 养,专注专业领域,以扎实的文化知识为日后担起建设祖国重任筑牢基础。树立 科学的理想信念,成为有责任、有担当的工程技术人员,为国家攻坚克难。 2.3毕业要求与课程目标的关系 毕业要求 观测点 支撑 课程目标 贡献 权重 度 JZLTS-1:PWM变换器.电动机系统的工作原理及调速特性 10% JZLTS-2:交直流调速系统双闭环调节器工程设计方法 25% 工程知识 5 0.15ZLTS-3:基于稳态模型的异步电动机变压变频调速 25% ZLTS4:基于动态模型的异步电动机矢量控制 30% ZLTS5:基于动态模型的水磁同步电动机矢量控制 10% 2问题分析 21 0.1zLTS-6:分析、建模能力 100% 3设计开发 3 0.2ZLTS-7:系统设计能力 100% 研究 4-2 0.1 ZLTS-8:实验能力 100%
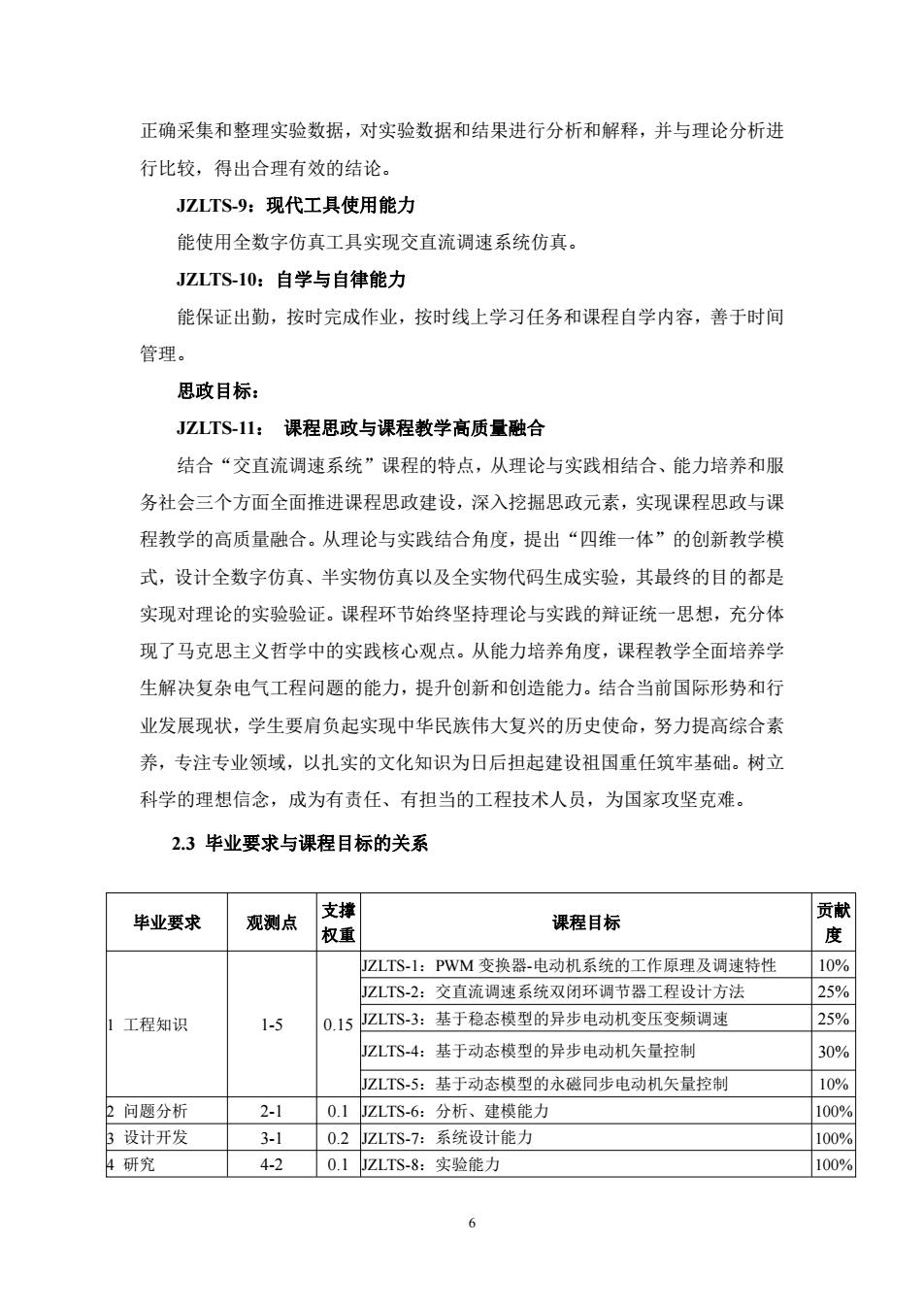
6 正确采集和整理实验数据,对实验数据和结果进行分析和解释,并与理论分析进 行比较,得出合理有效的结论。 JZLTS-9:现代工具使用能力 能使用全数字仿真工具实现交直流调速系统仿真。 JZLTS-10:自学与自律能力 能保证出勤,按时完成作业,按时线上学习任务和课程自学内容,善于时间 管理。 思政目标: JZLTS-11: 课程思政与课程教学高质量融合 结合“交直流调速系统”课程的特点,从理论与实践相结合、能力培养和服 务社会三个方面全面推进课程思政建设,深入挖掘思政元素,实现课程思政与课 程教学的高质量融合。从理论与实践结合角度,提出“四维一体”的创新教学模 式,设计全数字仿真、半实物仿真以及全实物代码生成实验,其最终的目的都是 实现对理论的实验验证。课程环节始终坚持理论与实践的辩证统一思想,充分体 现了马克思主义哲学中的实践核心观点。从能力培养角度,课程教学全面培养学 生解决复杂电气工程问题的能力,提升创新和创造能力。结合当前国际形势和行 业发展现状,学生要肩负起实现中华民族伟大复兴的历史使命,努力提高综合素 养,专注专业领域,以扎实的文化知识为日后担起建设祖国重任筑牢基础。树立 科学的理想信念,成为有责任、有担当的工程技术人员,为国家攻坚克难。 2.3 毕业要求与课程目标的关系 毕业要求 观测点 支撑 权重 课程目标 贡献 度 1 工程知识 1-5 0.15 JZLTS-1:PWM 变换器-电动机系统的工作原理及调速特性 10% JZLTS-2:交直流调速系统双闭环调节器工程设计方法 25% JZLTS-3:基于稳态模型的异步电动机变压变频调速 25% JZLTS-4:基于动态模型的异步电动机矢量控制 30% JZLTS-5:基于动态模型的永磁同步电动机矢量控制 10% 2 问题分析 2-1 0.1 JZLTS-6:分析、建模能力 100% 3 设计开发 3-1 0.2 JZLTS-7:系统设计能力 100% 4 研究 4-2 0.1 JZLTS-8:实验能力 100%
5使用现代工具5-10.1ZLTS-9:现代工具使用能力 100% 12终身学习12-10.1ZTS-10:自学与自律能力 100% 3课程内容及安排 3.1课程学时总体安排 课程性质:专业教育课程必修课 课内/实验/上机V课外学时:52/12/064 理论课 习题课 实验 研讨 社会实践项目任务在线学习 其他 (学时) (学时)(学时) (学时) (学时) (学时)(学时)(学时) 课课课课课课课课课误课误课课课课外 内外 内外内外内外 内外内外内外内 52520012000000001200 3.2各知识单元内容和预期学习目标 本课程内容分为8章,配有4个课内实验。下表介绍课程的章节划分,学时 安排,以及学习完成后的预期目标结果 知识单元 学习内容和预期结果 课程目标 学时 章、节、点 课内课外 筑1音 学习内容:运动控制系统组成,转矩控制规律 绪论 负载机械特性,转速转矩四象限运行。 11运动控制系统及其预期结果: 组成 1,2运动控制系统的历 D能识记和复述:三种典型的生产机械负载转ZLTS-1 2 2 史与发展 矩特性,转速转矩正方向定义。 JZLTS-10 1.3运动控制系统的转 矩控制规律 (2)能解释和举例:转速转矩四象限运行的电 14生产机械的负载转 机运行状态、电磁转矩和负载转矩在不同象限的 矩特性 驱、制动状态。 第2章 学习内容:不可逆PWM变换器电动及系统,可 转速开环控制的直流 调速系统 逆PWM变换器-电动机系统,直流PWM调速系 统的机械特性,PWM控制器与变换器的动态数 2.1PWM变换器.电动 JZLTS-1 学模型,直流PWM调速系统的电能回馈与泵升JZLTS-9 4 机系统的工作原理及 JZLTS-10 调速特性 电压:调速系统的稳态性能指标,PWMM系统 22稳态调速性能指 和开环系统存在的问 转速开环直流调速MATLAB仿真。 预期结果: >
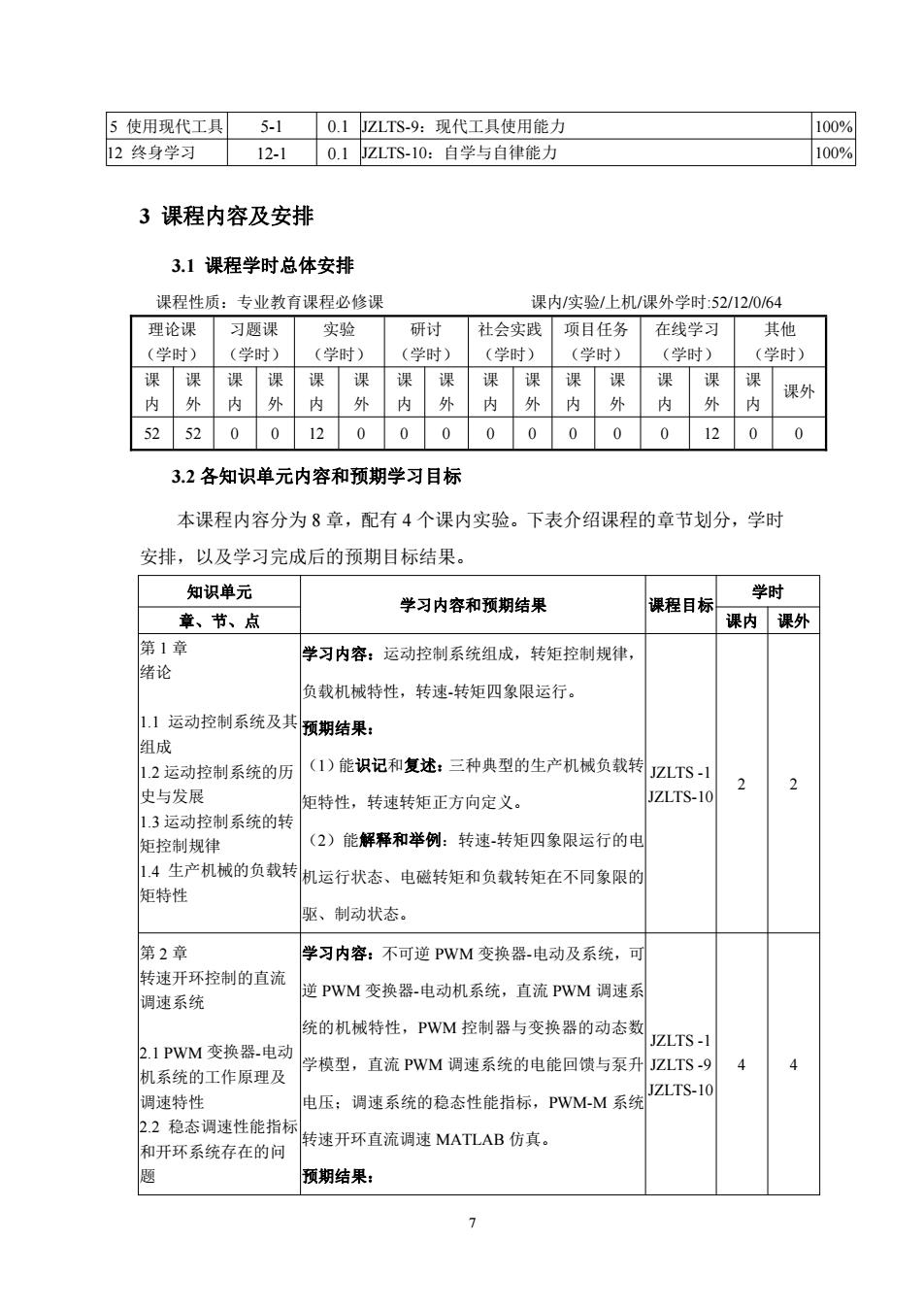
7 5 使用现代工具 5-1 0.1 JZLTS-9:现代工具使用能力 100% 12 终身学习 12-1 0.1 JZLTS-10:自学与自律能力 100% 3 课程内容及安排 3.1 课程学时总体安排 课程性质:专业教育课程必修课 课内/实验/上机/课外学时:52/12/0/64 理论课 (学时) 习题课 (学时) 实验 (学时) 研讨 (学时) 社会实践 (学时) 项目任务 (学时) 在线学习 (学时) 其他 (学时) 课 内 课 外 课 内 课 外 课 内 课 外 课 内 课 外 课 内 课 外 课 内 课 外 课 内 课 外 课 内 课外 52 52 0 0 12 0 0 0 0 0 0 0 0 12 0 0 3.2 各知识单元内容和预期学习目标 本课程内容分为 8 章,配有 4 个课内实验。下表介绍课程的章节划分,学时 安排,以及学习完成后的预期目标结果。 知识单元 学习内容和预期结果 课程目标 学时 章、节、点 课内 课外 第 1 章 绪论 1.1 运动控制系统及其 组成 1.2 运动控制系统的历 史与发展 1.3 运动控制系统的转 矩控制规律 1.4 生产机械的负载转 矩特性 学习内容:运动控制系统组成,转矩控制规律, 负载机械特性,转速-转矩四象限运行。 预期结果: (1)能识记和复述:三种典型的生产机械负载转 矩特性,转速转矩正方向定义。 (2)能解释和举例:转速-转矩四象限运行的电 机运行状态、电磁转矩和负载转矩在不同象限的 驱、制动状态。 JZLTS -1 JZLTS-10 2 2 第 2 章 转速开环控制的直流 调速系统 2.1 PWM 变换器-电动 机系统的工作原理及 调速特性 2.2 稳态调速性能指标 和开环系统存在的问 题 学习内容:不可逆 PWM 变换器-电动及系统,可 逆 PWM 变换器-电动机系统,直流 PWM 调速系 统的机械特性,PWM 控制器与变换器的动态数 学模型,直流 PWM 调速系统的电能回馈与泵升 电压;调速系统的稳态性能指标,PWM-M 系统 转速开环直流调速 MATLAB 仿真。 预期结果: JZLTS -1 JZLTS -9 JZLTS-10 4 4
2.3PWM-M系统转速 (1)能识记和复述:可逆PwM变换器输出电压 开环直流调速 MATLAB仿真 控制电压与占空比之间的关系。 (2)数学模型建立:能运用机理建模方法, 对PWM控制器与变换器作为调速系统一个环 节,建立其传递函数动态数学模型。 (3)能识记和复述:调速范围和静差率两个稳态 性能指标的基本概念和公式表达,能识记和解释 调速范围、静差率和额定速降之间的关系。 (4)MATLAB系统仿真实现:能运用MATLAE 仿真工具完成PWMM系统转速开环直流调速仿 真。 学习内容:比例控制转速闭环直流调速系统的结 构与静特性,开环系统与比例控制闭环系统静特 性对比分析,比例控制转速闭环系统的稳定性 PWM-M系统转速闭环控制直流调速系统 MATLAB仿真。 预期结果: 第3意 转速闭环控制的直流 (1)能根据比例控制转速闭环直流调速系统稳态 调速系统 模型,进行闭环系统静特性与开环系统机械特性 B1有静差的转速闭环对比分析,进行闭环系统和开环系统静差率和调2LTS2 直流调速系统 IZITS-9 4 速范围的对比分析。 32转速闭环控制直流 JZLTS-10 调速系统MATLAB仿 (2)动态数学模型建立:能根据系统各环节的 物理规律,列出描述该环节动态过程的微分方程 求出各环节的传递函数,组成系统的动态结构图, 求出系统的传递函数。针对PWM控制器与变换 器作为调速系统一个环节,建立其传递函数动态 数学模型。 (3)能根据系统动态数学模型分析比例控制速度 闭环直流调速系统的动态稳定性条件
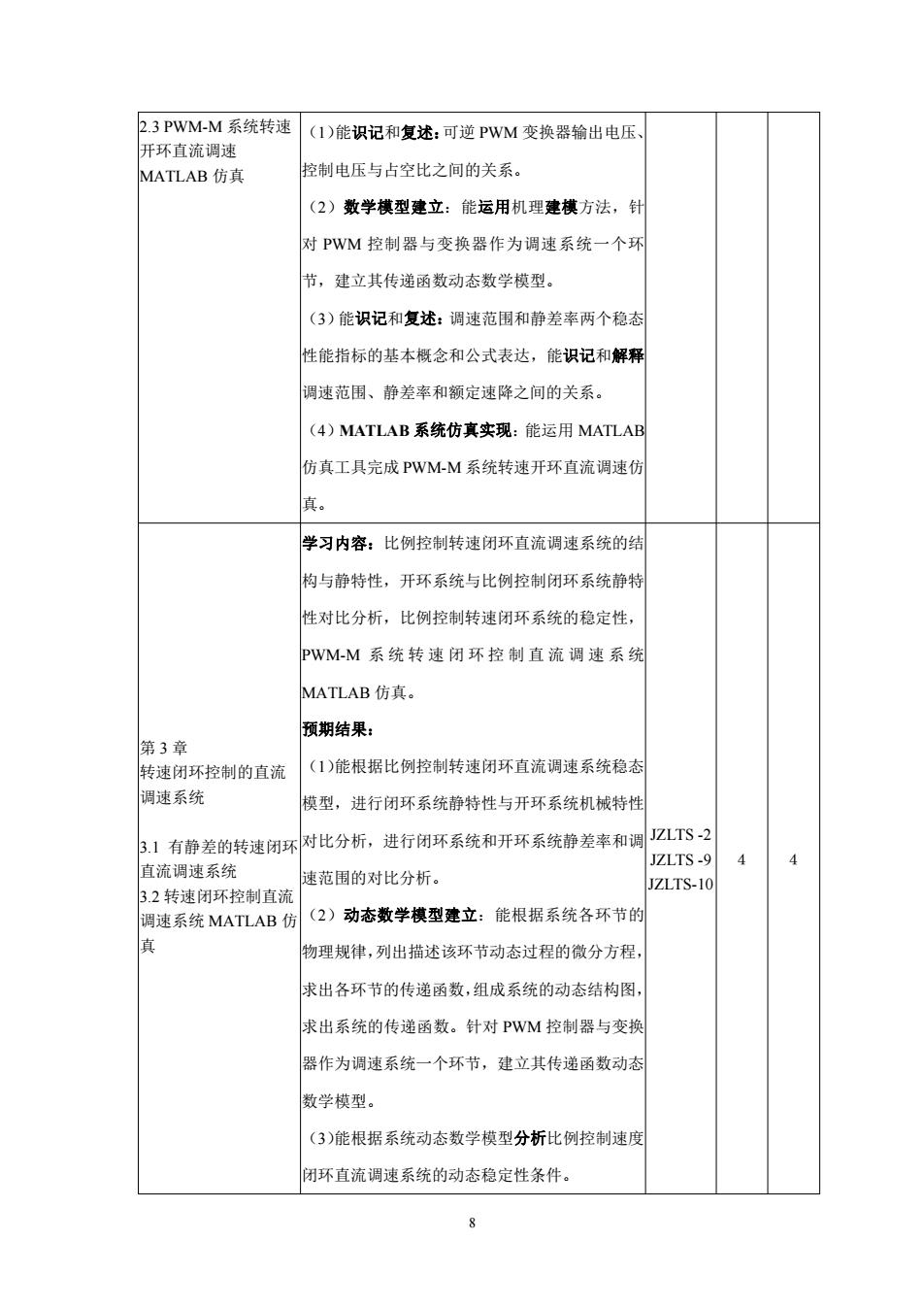
8 2.3 PWM-M 系统转速 开环直流调速 MATLAB 仿真 (1)能识记和复述:可逆 PWM 变换器输出电压、 控制电压与占空比之间的关系。 (2)数学模型建立:能运用机理建模方法,针 对 PWM 控制器与变换器作为调速系统一个环 节,建立其传递函数动态数学模型。 (3)能识记和复述:调速范围和静差率两个稳态 性能指标的基本概念和公式表达,能识记和解释 调速范围、静差率和额定速降之间的关系。 (4)MATLAB 系统仿真实现:能运用 MATLAB 仿真工具完成 PWM-M 系统转速开环直流调速仿 真。 第 3 章 转速闭环控制的直流 调速系统 3.1 有静差的转速闭环 直流调速系统 3.2 转速闭环控制直流 调速系统 MATLAB 仿 真 学习内容:比例控制转速闭环直流调速系统的结 构与静特性,开环系统与比例控制闭环系统静特 性对比分析,比例控制转速闭环系统的稳定性, PWM-M 系 统 转 速 闭 环 控 制 直 流 调 速 系 统 MATLAB 仿真。 预期结果: (1)能根据比例控制转速闭环直流调速系统稳态 模型,进行闭环系统静特性与开环系统机械特性 对比分析,进行闭环系统和开环系统静差率和调 速范围的对比分析。 (2)动态数学模型建立:能根据系统各环节的 物理规律,列出描述该环节动态过程的微分方程, 求出各环节的传递函数,组成系统的动态结构图, 求出系统的传递函数。针对 PWM 控制器与变换 器作为调速系统一个环节,建立其传递函数动态 数学模型。 (3)能根据系统动态数学模型分析比例控制速度 闭环直流调速系统的动态稳定性条件。 JZLTS -2 JZLTS -9 JZLTS-10 4 4