第4卷第3期 智能系统学报 Vol.4 No.3 2009年6月 CAAI Transactions on Intelligent Systems Jn.2009 doi:10.3969/j.issn.16734785.2009.03.005 小型无人机编队飞行的控制律设计与仿真 秦世引,潘宇雄,苏善伟 (北京航空航天大学自动化科学与电气工程学院,北京100191) 摘要:针对一种小型无人机模型及其编队飞行的实际背景和限制条件,采用长-僚机(leader--wingman)编队模式,按 前向、侧向和垂直方向3个通道分别设计了僚机编队控制律,从而使三维编队问题得以简化.对于多机编队的情况, 应用基于长机模式(leader mode)和前机模式(:ont mode)的2种编队控制策略,并通过仿真实验和比较分析,证实了 长机模式的优越性.通过2架小型无人机编队队形保持和多架无人机在大机动飞行情况下的队形保持与队形变换 等一系列仿真实验,验证了提出的编队飞行控制律的可行性和有效性 关键词:无人机;编队飞行;编队控制律;队形保持;队形变换 中图分类号:TP273.1文献标识码:A文章编号:16734785(2009)030218-08 Design and simulation of formation flight control laws for small unmanned aerial vehicles QIN Shi-yin,PAN Yu-xiong,SU Shan-wei (School of Automation Science and Electrical Engineering,Beihang University,Beijing 100191,China) Abstract:Based on general conditions as well as those limiting formation flight for small unmanned aerial vehicles (UAV),formation control laws were designed and then validated through simulations.Using the principle of lead- er-wingman so as to reduce the design complexity of the 3-D formation flight controls,three types of control laws were designed,covering forward,lateral and vertical motion respectively.The corresponding implementation algo- rithms were then analyzed.In view of formation control for multi-UAVs,some detailed comparative studies of con- trol performance between leader mode and front mode were carried out.Simulation results showed that the former outperforms the latter.Simulation results of formation keeping for two small UAVs and multiple UAVs under highly maneuvered flight conditions proved the feasibility and effectiveness of the formation control laws. Keywords:unmanned aerial vehicle;formation flight;formation control law;formation keeping;formation chan- ging 无人机编队飞行是指多架无人机为适应任务要的距离来实现.如果采用长-僚机编队模式,则特定 求而进行的某种队形排列和任务分配的多机飞行组 对象即为长机(飞在最前面的飞机)2];如果特定 织模式,其中包括编队飞行的队形产生、保持和变 点为编队几何中心,则应采用虚拟长机编队模 换,也包括飞行任务的规划和组织山.在军事侦察 式[).在实际应用中,由于长-僚机编队模式的简便 中,无人机编队飞行可以扩大侦察视野,提高作战命 性和实用性而被广泛采用,事实上,基于这种模式已 中率和任务成功率,具有单机飞行无法比拟的优点. 经设计出了多种形式的编队控制器,并给出了仿真 无人机编队飞行的基本要求是保持各飞机之间 验证结果5).近年来,在飞行验证方面也取得了一 所设定的相对姿态和相对位置,这可以结合编队模 些成果:2006年,西弗吉尼亚大学对其设计的编队 式,通过控制在队飞机相对于某一特定点(或对象) 控制器的性能进行了飞行测试,实现了2架小型无 人机的松散编队飞行];2007年,宾夕法尼亚州立 收稿日期:200809-24. 基金项目:国防基础科研基金资助项目(D212006001),国家自然科 大学成功进行了2架小型无人机协同搜索、监视一 学基金重点资助项目(60736025):国家自然科学基金资助 项目(60875072). 个感兴趣目标的飞行试验. 通信作者:潘宇雄.E-mal:twhpyx@163.com, 但是,在上述方法和试验中,只考虑了无人机编
第3期 秦世引,等:小型无人机编队飞行的控制律设计与仿真 .219. 队在平直和轻度机动下进行飞行的情况,而且没有 3)无人机绕质心转动的运动学模型为 考虑队形变换等复杂的编队形式.在飞行试验中往 do =p+(rcoso gsin)tan 0, 往要求无人机编队在某一可视范围内飞行,这就要 di 求无人机编队必须进行必要的机动飞行,并能根据 do dt gcos o-rsin (3) 不同的任务要求,变换不同的队形.本文针对一种小 业= cos): 1 型无人机模型在大机动飞行情况下,实现三机编队 d 的队形保持和3种队形变换的目标要求,设计了僚 4)无人机质心移动的运动学模型为 机编队控制律.仿真结果证实了其可行性和有效性 d¥=Vcos yco8X, 1小型无人机模型 d (4) 采用的小型无人机的实物照片如图1所示,该 dy=Vcos ysinx, dt 无人机采用“V'型尾翼,兼有水平尾翼和垂直尾翼 dz dt Vsin y. 的功能.·V'型尾翼的两侧舵面偏转方向相同时,具 利用水平无侧滑飞行条件P=B=u=0和p= 有升降舵的作用,反之具有方向舵的作用。 r=0,可将运动学方程(模型)解耦为不依赖于纵向 状态量(V,α,9,0)的横侧向运动方程为 mVB =Y-mV(-psin a rcos a), =p+(rcos gsin )tan0, =rcosp gsinp c080 (5) 图1小型无人机实物照 Ip Ms, Fig.1 Profile of the small UAV Li=M.. 根据经典飞行控制理论,可建立小型无人机的 而相应的纵向运动方程为 12阶微分方程模型,其中包括动力学模型和运动学 my Tcos a-D-mgsiny, 模型0川,如式(1)~(4)所示.其中,各个符号所对 mVy Tsin a +L-mgcosy, 应的物理意义如表1所述. (6) a=q-y, 1)无人机绕质心转动的动力学模型为 I9=M, =2M--4)1. 表1参数符号说明 dt Table 1 A list of parameter symbols 8是=2M,-u-4m, di (1) 参数名称 符号 参数名称 符号 =--4)m1: 滚转角速度 滚转角 俯仰角速度 9 俯仰角 8 2)无人机质心移动的动力学模型为 偏航角速度 偏航角 必 Too(ar)onB- 阻力 D 滚转力矩 侧力 俯仰力矩 M, D-mgsin y], 升力 偏航力矩 M dX=1{亿in4+co8h+ 推力 T 无人机速度 dt mVcos y X轴距离 X轴速度分量 v T[sin(a+r)sinu- (2) Y轴距离 Y轴速度分量 cos(a +r)sin Bcosu], Z轴距离 Z轴速度分量 y cor)sin pin 前向距离期望 前向距离误差 f 侧向距离期望 侧向距离误差 sin(a +r)cosu]Lcosu- 垂直距离期望 he 垂直距离误差 Ysinu mgcos y;
,220 智能系统学报 第4卷 续表1 mYod=-aL a mVog- . 参数名称 符号 参数名称 符号 (10) 迎角 a 侧滑角 B a M,a M, 9 副翼偏角 BA 方向舵偏角 SR aq +0 升降舵偏角 Bs 油门输入命令 8r 在式(9)和式(10)中: 长机下标 L 僚机下标 W aM 航迹滚转角 心 X轴转动惯量 da =gSbCMe, 航迹倾斜角 Y轴转动惯量 aM, 航迹方位角 X Z轴转动惯量 da =gSbCwe, 动压 平均气动弦长 c 翼展 b 无人机质量 ar m =gSCye, (11 da 机翼面积 发动机安装角 Pr 滚转力矩系数 阻力系数 Cp a M, =gScCMs, 俯仰力矩系数 C 侧力系数 Cy aa 偏航力矩系数 升力系数 Cr gSCra 在一般情况下,如巡航飞行,迎角α和航迹倾 aa 斜角Y很小,可近似为零.且只考虑短周期运动情 式中:a代表B、p、r、64、6a等参数;a代表a、q、8g等 况时,由式(5)和式(6)可分别得到横侧向短周期运 参数;Cw表示参数U对参数V的气动导数 动方程为 本文所针对的小型无人机的质量m=10kg,气 动弦长c=0.38m,机翼展长b=3m,机翼面积S= mVB Y-mVr, Ip M., 1.14m2,X、Y、2轴转动惯量分别为I.= (7) Ii M 1.6kg·m2,L,=2.5kg·m2,I=3.2kg·m2.在海 平面水平飞行,飞行速度V=20.0m/8,迎角a= 纵向短周期运动方程为 1.628°,大气密度为1.225kgm3的状态下求得各 mVa mVg-L+mg, (8) 气动导数值如表2所示.将相应参数值代入式(9) 1,g M, 和式(10),可以得到横侧向短周期运动模型为 方程中各参量需要根据飞机当前的飞行状态实 「-0.1760 -0.0069-0.98717[B1 地确定,在此以某一飞行平衡状态为基准运动,在小 -26.7081-17.8316 0.8248 扰动情况下假设这些力和力矩为相应量的线性关系。 13.0922 -0.0196 -1.0801 若将无人机的直线定常无侧滑飞行作为基准运 0.0391 0.2206 动,在小扰动假设下就可得到无人机的横侧向短周 111.021810.4738 (12) 期近似模型为 819 0 -19.9001J mVoB =aY app+(or or -1)r+ 同理可得纵向短周期运动模型为 a aY。 -6.6543 06+ -56,lrg+ aM.。,aM.aM 0B8+3 Ip dpp+ r+ 0.578616g (13) 1-16.9823J 0M6,+0M5, (9) 表2气动导数值 A+1 864 a8R Table 2 Values of aerodynamic derivatives aM。,aM,.aM Ir= 08B+ opp+ r+ 气动导数名称 取值 气动导数名称取值 a r CMp -0.051 Cxz -0.454 aM、 aM. 864 Gua 0.021 CM 0.212 CMeR 0.020 CxA 0.054 纵向短周期近似模型为 Cwa -0.001 Gwg -0.055
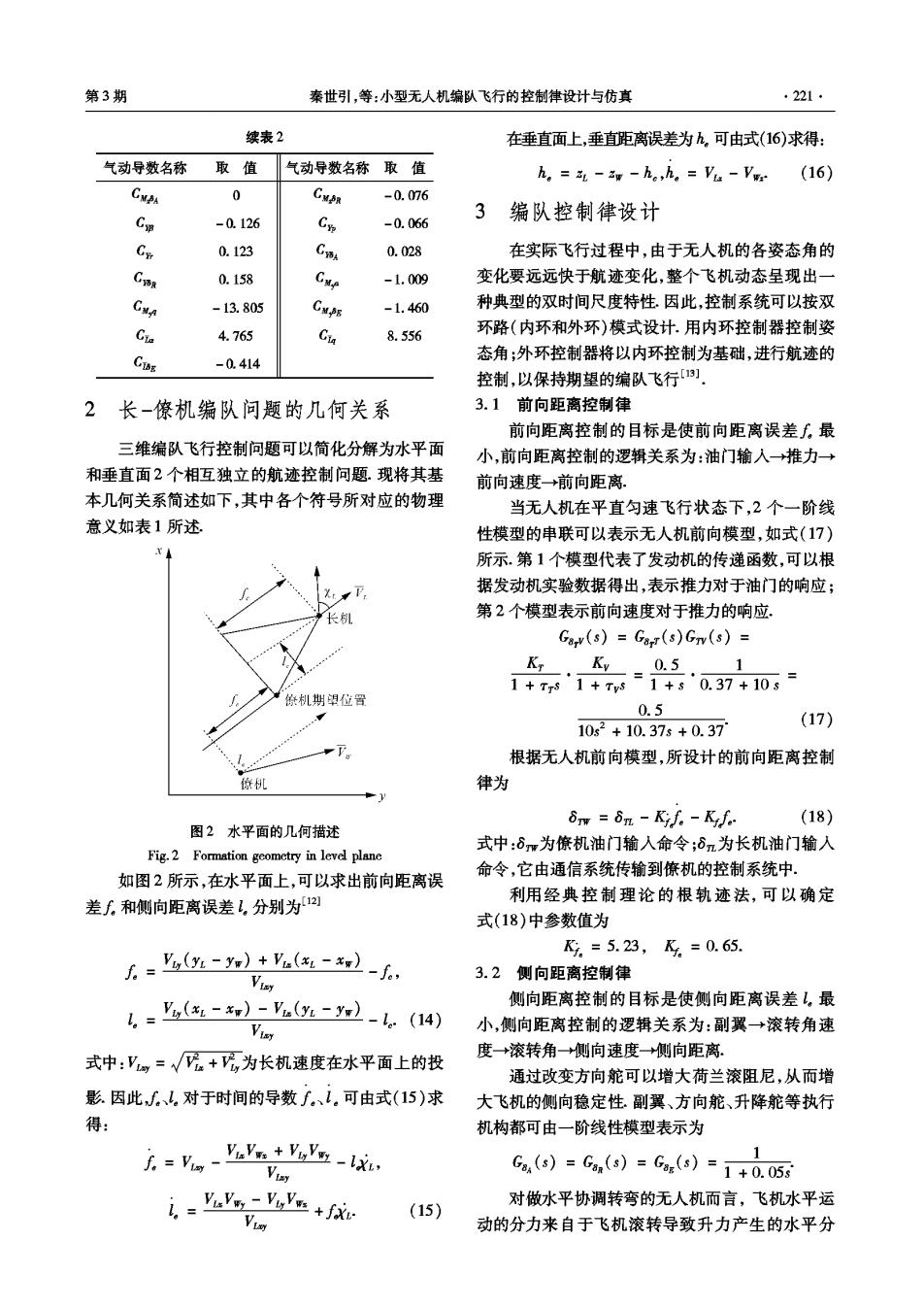
第3期 秦世引,等:小型无人机编队飞行的控制律设计与仿真 .221. 续表2 在垂直面上,垂直距离误差为九,可由式(16)求得: 气动导数名称 取值 气动导数名称取值 h。=-g-h。,h。=Va-Vwr (16) CMPA CMPR -0.076 3 编队控制律设计 Cm -0.126 C -0.066 Cor 0.123 CyA 0.028 在实际飞行过程中,由于无人机的各姿态角的 Cy 0.158 Gxe -1.009 变化要远远快于航迹变化,整个飞机动态呈现出一 A -13.805 CMp部 -1.460 种典型的双时间尺度特性.因此,控制系统可以按双 Cte 4.765 Ci 8.556 环路(内环和外环)模式设计.用内环控制器控制姿 CIE 态角;外环控制器将以内环控制为基础,进行航迹的 -0.414 控制,以保持期望的编队飞行[3 2长-僚机编队问题的几何关系 3.1前向距离控制律 前向距离控制的目标是使前向距离误差。最 三维编队飞行控制问题可以简化分解为水平面 小,前向距离控制的逻辑关系为:油门输入→推力→ 和垂直面2个相互独立的航迹控制问题.现将其基 前向速度→前向距离。 本几何关系简述如下,其中各个符号所对应的物理 当无人机在平直匀速飞行状态下,2个一阶线 意义如表1所述. 性模型的串联可以表示无人机前向模型,如式(17) 所示.第1个模型代表了发动机的传递函数,可以根 据发动机实验数据得出,表示推力对于油门的响应; 第2个模型表示前向速度对于推力的响应。 Gov(s)=Gor(s)Grv(s)= K Ky 0.5 1 1+7‘1+r=1+5`0.37+105= 徐机期望位置 0.5 10s2+10.375+0.37 (17) 根据无人机前向模型,所设计的前向距离控制 贷机 律为 1 δm=δm-Kf。-Kf。 (18) 图2水平面的几何描述 式中:δm为僚机油门输人命令;δm为长机油门输入 Fig.2 Formation geometry in level plane 命令,它由通信系统传输到僚机的控制系统中, 如图2所示,在水平面上,可以求出前向距离误 差f和侧向距离误差L,分别为1) 利用经典控制理论的根轨迹法,可以确定 式(18)中参数值为 K.=5.23,K,=0.65. 无-,m-)+-l-6, 3.2侧向距离控制律 1=,-)%-2-.(14) 侧向距离控制的目标是使侧向距离误差。最 小,侧向距离控制的逻辑关系为:副翼→滚转角速 度→滚转角→侧向速度→侧向距离。 式中:V=√+,为长机速度在水平面上的投 通过改变方向舵可以增大荷兰滚阻尼,从而增 影.因此,、。对于时间的导数∫。、l.可由式(15)求 大飞机的侧向稳定性.副翼、方向舵、升降舵等执行 得: 机构都可由一阶线性模型表示为 .von Vayn t Vovnlxu G (s)=Gan(s)=Gor(s)=1+0.05s 1 i=-y,+ 对做水平协调转弯的无人机而言,飞机水平运 (15) 动的分力来自于飞机滚转导致升力产生的水平分

222. 智能系统学报 第4卷 量.若维持其平衡,则该水平分力应等于飞机转弯时 设计,外环控制律基于式(26)和式(27)进行设计. 的离心力,飞机升力在垂直方向上的分量应等于其 因此内环控制律为 重力,其关系可表述如下: 8'gw=-K9w-K,(0w-0) (28) Lsin o mVww, 外环控制律为 Lcos o mg. (19) 8gw =SgL +8'gw Kih.-Ki.h (29) 由式(19)可得 是nr民r 式中:δ瓢δm、0、0,分别为长、僚机的升降舵偏角 Xv=V (20) 和长、僚机的俯仰角,6,和0,的数值由通信系统传 利用长机做平直飞行的条件(化=0),可得 输到僚机的控制系统中. 4蚁=Xw-X=Xw (21) 式(28)和式(29)中参数值可以利用根轨迹法 而且式(15)可以简化为 确定如下: Kg=0.2,Kg=0.2, L。=Vwssin(Xg-)= K,=0.01,K,=0.005. Vwssin(4)=VwAx (22) 由式(20)、(21)和(22)可得到以下航迹动态方程: 4仿真结果与分析 L,=Vw到以, 4.1两机队形保持 (23) 采用长-僚机编队模式,利用Matlab/Simulink 在以下5个假设条件和边界条件下进行仿真 因此,完整的无人机横侧向线性模型为式(12)和 1)飞行速度保持在20m/s; 式(23),其中内环控制律基于式(12)进行设计,外 2)垂直面上采用“平飞一爬升一平飞”的航迹, 环控制律基于式(23)进行设计 708时开始爬升,飞行高度由100m爬升到150m; 因此可以得到内环控制律为 3)队形参数设定为 8'Aw=-K,Pw-K(pg-P), f。=-25m,L。=25m,h。=0; 8RW 6RL -K,rw (24) 4)初始位置误差为 外环控制律为 f。=-25m,L。=50m,h。=0; 8Aw=6u+84w-K,L。-K,L。 (25) 5)仿真时间为1208. 式中:δu、6AwδL、6w、P红、Pm分别为长、僚机副翼偏 仿真结果如图3~5所示,图3表示僚机位置误 角,长、僚机方向舵偏角和长、僚机滚转角.64L、δu、 差变化曲线;图4、图5分别表示两机水平面和垂直 P:的数值由通信系统传输到僚机的控制系统中. 面的轨迹,其中实线代表长机,虚线代表僚机 利用根轨迹法,可以确定式(24)和式(25)中的 50[ 参数值为 E -50 K2=0.15,K。=1.2,K.=0.2, 20 406080100120 飞行时间/s K.=0.13,K,=0.4. (a)而向误差变化 3.3垂直距离控制律 50 垂直距离控制的目标是使垂直距离误差h,最 -50 小,垂直距离控制的逻辑关系为:升降舵→俯仰角速 20 406080.100120 飞彳时问间/s 度→俯仰角+垂直速度+垂直距离。 化)侧向误差变化 飞行高度与俯仰角之间满足关系式 iw=Vw=Vwin0w≈Vw0g (26) 俯仰角与俯仰角速率之间满足关系式 20 4060.80100120 飞行时问/ 0=q (27) ()垂直误差变化 所以完整的无人机垂直方向线性模型为式(13)、 图3位置误差变化曲线 (26)和(27)所示,其中内环控制律基于式(13)进行 Fig.3 Change curve of distance error