超磁仿生机器鱼力学机理及数值模拟 超磁致伸缩材料具有磁性和弹性双重性质,在外磁场作用下,其内部会产生的应变 由两部分组成,其中一部分为磁致伸缩引起的应变,用ε,表示: En =dH, (2.7) 式中,d为动态磁致伸缩系数,H为外部磁场强度。 外部磁场由固定的铁芯线圈通上交流电后产生,并考虑超磁仿生机器鱼在磁场范围 内游动。在可变外部磁场作用下,超磁致伸缩材料的磁感应强度B与外部磁场强度H成 线性比例关系),设外部磁场强度随时间变化的关系式为: H=B14=B(t), (2.8) B。代表外部磁感应强度的幅值,4为磁导率,()为可控外部磁场强度大小随时间变 化的函数。设可控外部磁场强度大小随时间变化的函数为: (t)=cos(@t), (2.9) 式中,0为外部磁感应强度的频率。 由于镀在合金薄板上的超磁致伸缩材料在可变外部磁场作用下,由磁致伸缩效应引 起的应力为106: On=EEu=EdH=EdB(t), (2.10) 式中,£为磁致伸缩效应引起的应变,超磁致伸缩材料的弹性模量为E,。σH在梁上是 分布剪应力,可以化成分布弯矩:取(,z)处的微元段dz如图2.5b)所示,由于超磁 致伸缩材料厚度相对合金薄板很薄,即h(x,z)<h(x,z),则中性轴即为横坐标轴, 于是剪切应力σ对合金薄板的弯矩作用可以被表示出。考虑超磁材料在磁化过程的磁 化方向与坐标x轴方向夹角为α(x,z)。根据弹性薄板理论和微元分析,可得到弯矩表达 式: -18- 万方数据
超磁仿生机器鱼力学机理及数值模拟 超磁致伸缩材料具有磁性和弹性双重性质,在外磁场作用下,其内部会产生的应变 由两部分组成,其中一部分为磁致伸缩引起的应变,用sH表示: £Ⅳ=dH, (2.7) 式中,d为动态磁致伸缩系数,H为外部磁场强度。 外部磁场由固定的铁芯线圈通上交流电后产生,并考虑超磁仿生机器鱼在磁场范围 内游动。在可变外部磁场作用下,超磁致伸缩材料的磁感应强度B与外部磁场强度日成 线性比例关系【85】,设外部磁场强度随时间变化的关系式为: H=B/I-t=Bo≯(t), (2.8) 鼠代表外部磁感应强度的幅值,∥为磁导率,矽(f)为可控外部磁场强度大小随时间变 化的函数。设可控外部磁场强度大小随时间变化的函数为: 矽(f)=cos(0at), (2.9) 式中,09为外部磁感应强度的频率。 由于镀在合金薄板上的超磁致伸缩材料在可变外部磁场作用下,由磁致伸缩效应引 起的应力为‘1061: %=Elo。H=EldH=巨dBo≯(t), (2.10) 式中,sⅣ为磁致伸缩效应引起的应变,超磁致伸缩材料的弹性模量为E。。盯Ⅳ在梁上是 分布剪应力,可以化成分布弯矩:取(x,z)处的微元段dxdz如图2.5(b)所示,由于超磁 致伸缩材料厚度相对合金薄板很薄,即‰(x,z)<<h(x,z),则中性轴即为横坐标轴, 于是剪切应力仃H对合金薄板的弯矩作用可以被表示出。考虑超磁材料在磁化过程的磁 化方向与坐标x轴方向夹角为口(x,z)。根据弹性薄板理论和微元分析,可得到弯矩表达 式: 一18 万方数据
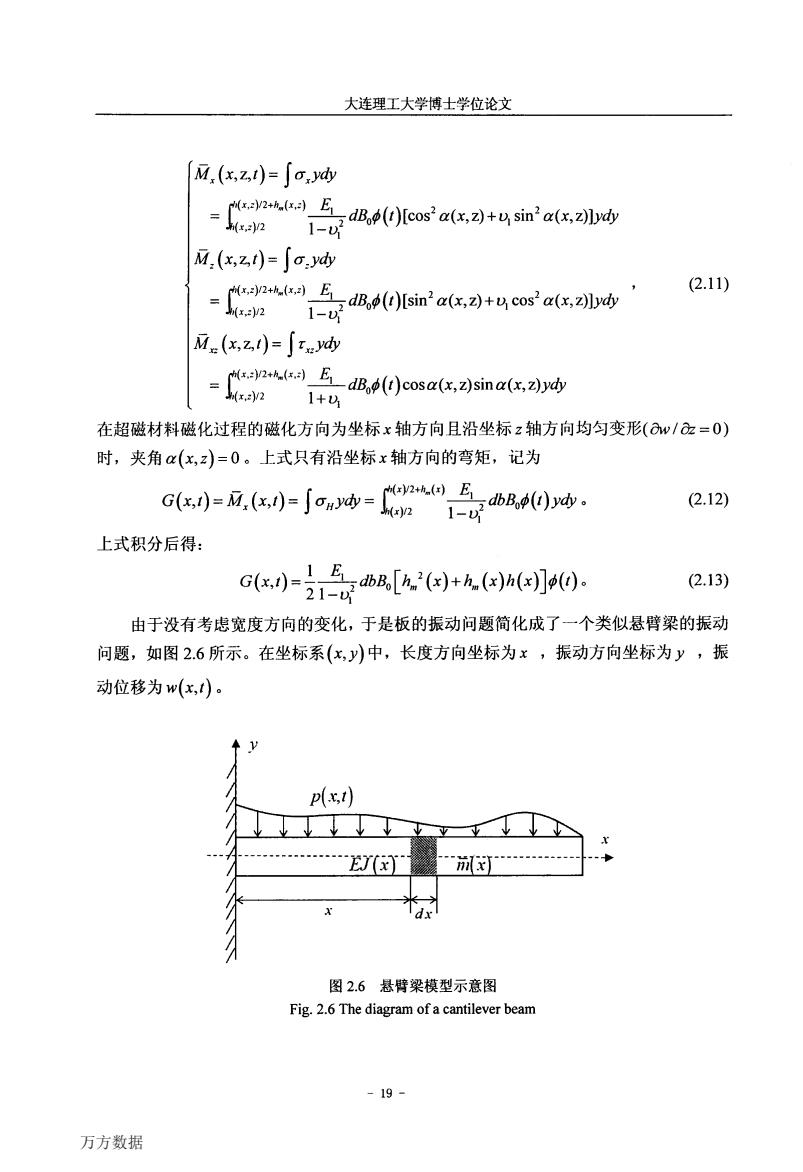
大连理工大学博士学位论文 M(x乙)=∫o,y ,a2+E 制x,y2 dB(t)[cos2a(x,z)+v sin2a(x,z)lydy 1-2 M(x,z)=Jo d()sin(coa( (2.11) b(s.y2 1-u2 M(x,z)=∫r EdB()cosa()sina(ydy x/2 1+4 在超磁材料磁化过程的磁化方向为坐标x轴方向且沿坐标z轴方向均匀变形(w/z=0) 时,夹角α(x,z)=0。上式只有沿坐标x轴方向的弯矩,记为 G--=jn商-n气80. (2.12) 上式积分后得: Gk,)=Eb,[n,')+h()h(]0. (2.13) 21-2 由于没有考虑宽度方向的变化,于是板的振动问题简化成了一个类似悬臂梁的振动 问题,如图2.6所示。在坐标系(x,y)中,长度方向坐标为x,振动方向坐标为y,振 动位移为w(x,)。 p(x,t) EJ() x 图2.6悬臂梁模型示意图 Fig.2.6 The diagram of a cantilever beam -19- 万方数据
大连理工大学博士学位论文 Mx(础,t)2 J Crxydy =襞裳吨。一’Feul dBo≯(f)[cos2口(础)+01 sin2 a(础)】助 厨:(琊,f)=,%ydy =Px.z))/212州¨’击蛾删Sin2咖)+u1 cos2a∽Z)]助’ ‘2J1’ 矾(础,f)=』r。ydy =或劣吨卜,:’再Eu,dBo≯(,)c。s口(‘z)sin口(五z)助 在超磁材料磁化过程的磁化方向为坐标x轴方向且沿坐标z轴方向均匀变形(Ow/Oz=0) 时,夹角口(x,z)=0。上式只有沿坐标x轴方向的弯矩,记为 G(刈)=取(圳=,%助=rx)122吨。’击彩剐(f)ydy。 (2.12) 上式积分后得: G(x,r)=圭f戋砌玩[‰2(x)+‰(x)办(x)]矽(,)。 (2.13) 由于没有考虑宽度方向的变化,于是板的振动问题简化成了一个类似悬臂梁的振动 问题,如图2.6所示。在坐标系(x,Y)中,长度方向坐标为x,振动方向坐标为Y,振 动位移为w(x,f1。 n等’上n 上上上上上_F、、’了一v了77了、【、1\ v万叮n。 黼 EJ ’i)戮I—ll r— X 、 ,、 , x dx 图2.6悬臂梁模型示意图 Fig.2.6 The diagram of a cantilever beam 万方数据
超磁仿生机器鱼力学机理及数值模拟 对超磁致伸缩材料在外磁场作用下施加在合金薄板上的弯矩,通过对横坐标求导化 为梁上的分布外力,即: p(x,t)=G"(x,), (2.14) 将式(2.13)代入上式并经整理可得 h'(h,'(+h(h,"(倒+'(h() (2.15) 1-2 +h()h(✉)+.()h() 在式(215)中,令P(x)为分布载荷密度,则: p(x,)=P(x)(, (2.16) 从表达式(2.15)可以发现超磁致伸缩材料和合金薄板的厚度对这种分布外力有直接的影 响。 设E,和),分别为合金薄板的弹性模量和泊松比,J(x)为合金薄板横截面的惯性 矩,m(x)为合金薄板的线质量,因为合金薄板的厚度为h(x),鱼尾的宽度为b,设模 拟鱼骨架的合金薄板的横截面为矩形,则: J(x)=bh(x)/12, (2.17) (x)=p,bh(x), (2.18) 其中,P2为模拟鱼骨架的合金薄板密度。 如果合金薄板厚度沿梁长为线性分布,在原点处厚度为h。,在梁末端厚度为零, 则合金薄板厚度分布函数为: h(x)=h(1-x/1), (2.19) 而如果模拟鱼肌肉的磁致伸缩材料沿梁长也为线性分布,在梁左端厚度为h。,在梁末 端厚度为零,则磁致伸缩材料厚度分布函数为: hn(x)=hno(1-x/l), (2.20) 将上两式代入式(2.16)、式(2.17和式(2.18),得到线分布载荷: P国气学+), (2.21) 横截面惯性矩为: J(x)=bh(1-x/1)112, (2.22) -20- 万方数据
超磁仿生机器鱼力学机理及数值模拟 对超磁致伸缩材料在外磁场作用下施加在合金薄板上的弯矩, 为梁上的分布外力,即: p(x,t)=G”(x,f), 将式(2.1 3)代入上式并经整理可得: 咖)=鑫砌玩 通过对横坐标求导化 引x)‰’(x)+ho(x)州x)+12 h,(x)厅(x) +hnlt(x)办’(x)+三‰(x)办”(x) f2.14) 在式(2.15)qh,令P(x)为分布载荷密度,则: p(x,t)=P(x)≯(f), (2.16) 从表达式(2.15)可以发现超磁致伸缩材料和合金薄板的厚度对这种分布外力有直接的影 响。 设臣和呸分别为合金薄板的弹性模量和泊松比,J(x)为合金薄板横截面的惯性 矩,历(x)为合金薄板的线质量,因为合金薄板的厚度为h(x),鱼尾的宽度为b,设模 拟鱼骨架的合金薄板的横截面为矩形,则: J(x)=bh3(x)/12, (2.17) 历(x)=p2bh(x), (2.18) 其中,P:为模拟鱼骨架的合金薄板密度。 如果合金薄板厚度沿梁长为线性分布,在原点处厚度为‰,在梁末端厚度为零, 则合金薄板厚度分布函数为: h(x)=ho(1-x11), 而如果模拟鱼肌肉的磁致伸缩材料沿梁长也为线性分布,在梁左端厚度为‰。 端厚度为零,则磁致伸缩材料厚度分布函数为: ‰,(X)=k。(1一x/1), 将上两式代入式(2.16)、式(2.17)和式(2.18),得到线分布载荷: 尸(x)=两E2丁dBob‰。(吃,。+‰), 横截面惯性矩为: J(x)=bh03(1-x/1)3/12, 20 (2.19) ,在梁末 f2.20) f2.21) (2.22) 万方数据
大连理工大学博士学位论文 以及线密度为: m(x)=Pbh(1-x/), (2.23) (2.24) 如果合金薄板厚度为均匀分布函数: h(x)=h, (2.25) 而模拟鱼肌肉的磁致伸缩材料沿梁长厚度分布函数同样为线性分布,即 h(x)=ho(1-x/l),则线分布载荷: 20 横截面惯性矩为: J(x)=bh3/12, 2.27) 以及线密度为: m(x)=Pbh。 (2.28) 2.3超磁机器鱼的固有频率和振型 超磁机器鱼鱼尾在外磁场作用下摆动的简化力学梁模型如图2.6所示。考虑x轴为 轴线,坐标原点位于该鱼尾的左端部,鱼尾长度为L。并考虑模拟骨架的合金板为矩形 截面且均匀。用(x,)表示鱼尾在x处和时刻1的横向位移。首先忽略超磁材料质量和刚 度,讨论无阻尼及其它因素影响,利用微元法可得到运动控制方程 B+2,2r0+n0-0, o2 (2.29) 若考虑沿坐标z轴方向均匀变形(⊙w/z=0)时,上式退化为梁模型8,如下 是袋+n器+nt0-0 (2.30) 其中m单位长度质量,EI为抗弯刚度,(x,)为横向分布载荷。边界条件可以表述为 左端固支和右端自由,即可表达为 -21- 万方数据
大连理工大学博士学位论文 以及线密度为: 历(x)=pzbho(1一x11), (2.23) (2.24) 如果合金薄板厚度为均匀分布函数: h(x)=‰, (2.25) 而模拟鱼肌肉的磁致伸缩材料沿梁长厚度分布函数同样为线性分布,即 ‰(X)=‰。O-x/Z),则线分布载荷: 尸(工)=南丁aBob‰。2, (2.26) 横截面惯性矩为: J(x)=bh03/12, (2.27) 以及线密度为: 历(x)=p2bho。 (2.28) 2.3超磁机器鱼的固有频率和振型 超磁机器鱼鱼尾在外磁场作用下摆动的简化力学梁模型如图2.6所示。考虑X轴为 轴线,坐标原点位于该鱼尾的左端部,鱼尾长度为三。并考虑模拟骨架的合金板为矩形 截面且均匀。用w(x,f)表示鱼尾在x处和时Nt的横向位移。首先忽略超磁材料质量和刚 度,讨论无阻尼及其它因素影响,利用微元法可得到运动控制方程 彤r学+2等笋+学M学喇础力一o,亿29, 若考虑沿坐标z轴方向均匀变形(挑/瑟:O)时,上式退化为梁模型【85】,如下 昙[彤等M学眺归。. (2.3。) 其中而单位长度质量,彤为抗弯刚度,p(x,t)为横向分布载荷。边界条件可以表述为 左端固支和右端自由,即可表达为 万方数据
超磁仿生机器鱼力学机理及数值模拟 wx)lo=0 ow(x,t) Bx -o=0 a2w(x,) (2.31) Ox? l=0 8'w(x,t) dx3 =0 在考虑自由振动问题中,只需讨论(2.30)的齐次方程 m0wx.0+D0wx,0=0, 812 (2.32) Ox 这里抗弯刚度在梁的模型下为D=EJ=EJ;而对于板模型,抗弯刚度应该表示为 D=E,J1(1-)。采用分离变量法去求解该方程。令 w(x,t)=Y(x)T(t). (2.33) 将上式代入方程(2.32),可分解为两个常微分方程,如下 d2T+o2T)=0, (2.34) dr Dd'Y因-ma2Y=0. (2.35) dx 这里0为未知参数。方程(2.34)的解可直接求解出 T(1)=Asin(at+), (2.36) 其中中为待定常数。事实上,0就是结构的自振频率,中为相位角。方程(235)的解可求 解出为 w=ach(x)+a,sh(kx)+acos(x)+asin(x) (2.37) 其中k2=0Nm/D。将解代入边界条件(2.31),得 1 0 a 0 k a, =0 k2ch(kL)k2sh(kL)-k2cos(kL)-k2sin(kL) (2.38) k'sh(kL)k'ch(kL)k'sin(kL) -k'cos(kL) a 存在非零解的条件为系数行列式为零,即 -22- 万方数据
超磁仿生机器鱼力学机理及数值模拟 w(五r)x=0=0 掣X=0 o 出 掣Ix=Z o‘ 反2 丁33w(x,t)Im:o a譬’ ”L 在考虑自由振动问题中,只需讨论(2.30)的齐次方程 一—02—w(下x,一t)+D34w(x.,t).:0m ———I一十 .。2,, 8t。a# 这里抗弯刚度在梁的模型下为D=E1=E2J;而对于板模型, D=E2J/(1-v;)。采用分离变量法去求解该方程。令 w(x,f)=H功Hf). 将上式代入方程(2.32),可分解为两个常微分方程,如下 _d2TF(t).I-国2T(f):0, 应2 ~ 。 (2.31) f2.32) 抗弯刚度应该表示为 f2.33) f2.34) D掣一历coZY(加0. (2.35) ax 这里09为未知参数。方程(2.34)的解可直接求解出 孔f)=Asin(倒+彩, (2.36) 其中≯为待定常数。事实上,03就是结构的自振频率,矽为相位角。方程(2.35)的解可求 解出为 W=aich(/oc)+a2sh(kx)+a3cos(kx)+a4sin(kx) (2.37) 其中k2=CO√历/D。将解代入边界条件(2.31),得 0 k k 2sh(kL) k3ch(kL) l 0 一k2cos(kL) k3sin(kL) 存在非零解的条件为系数行列式为零,即 0 k —k2sin(kL) -k3cos(kL) q 口2 吩 口4 =0 (2.38) 地地 ●0 M L~七 七% K 万方数据