
因此,只有一个变量是独立的,状态变量只能选其中一个,即用其中的任意一个变量作 为状态变量便可以确定该电路的行为。实际上,三个串并联的电容可以等效为一个电容。 对图8-5(b)所示电路,1=,因此两者相关,电路只有两个变量是独立的,即(x 和)或和,可以任用其中一组变量如(,)作为状态变量。 8.13系统的传递函数矩阵 设初始条件为零,对线性定常系统的动态方程进行拉氏变换,可以得到 X(s)=(sI-A)BU(s) (8-6) Y(s)=[C(sI-A)B+DWU(s) 系统的传递函数矩阵(简称传递矩阵)定义为 G(s)=C(sI-A)B+D (8-7) 例8-2已知系统动态方程为 [-86] 试求系统的传递函数矩阵。 "w4-a-0c-0-0 Gs)=C(1-A0B= 部
332 因此,只有一个变量是独立的,状态变量只能选其中一个,即用其中的任意一个变量作 为状态变量便可以确定该电路的行为。实际上,三个串并联的电容可以等效为一个电容。 对图 8-5(b)所示电路,x1 = x2,因此两者相关,电路只有两个变量是独立的,即(x1 和 x3)或(x2 和 x3),可以任用其中一组变量如(x2,x3)作为状态变量。 8.1.3 系统的传递函数矩阵 设初始条件为零,对线性定常系统的动态方程进行拉氏变换,可以得到 1 1 ( ) ( ) ( ) ( ) [ ( ) ] ( ) X s sI A BU s Y s C sI A B D U s − − = − = − + (8-6) 系统的传递函数矩阵(简称传递矩阵)定义为 G s = C sI − A B + D −1 ( ) ( ) (8-7) 例 8-2 已知系统动态方程为 = + − = 2 1 2 1 2 1 2 1 2 1 0 1 1 0 0 1 1 0 0 2 0 1 x x y y u u x x x x 试求系统的传递函数矩阵。 解 已知 0 1 1 0 1 0 , , , 0 0 2 0 1 0 1 A B C D = = = = − 故 + + = + − − = − − 2 1 0 ( 2) 1 1 0 2 1 ( ) 1 1 s s s s s s sI A G(s) = C + + = + + − = − 2 1 0 ( 2) 1 1 0 1 1 0 2 1 0 ( 2) 1 1 0 1 1 0 ( ) 1 s s s s s s s s sI A B
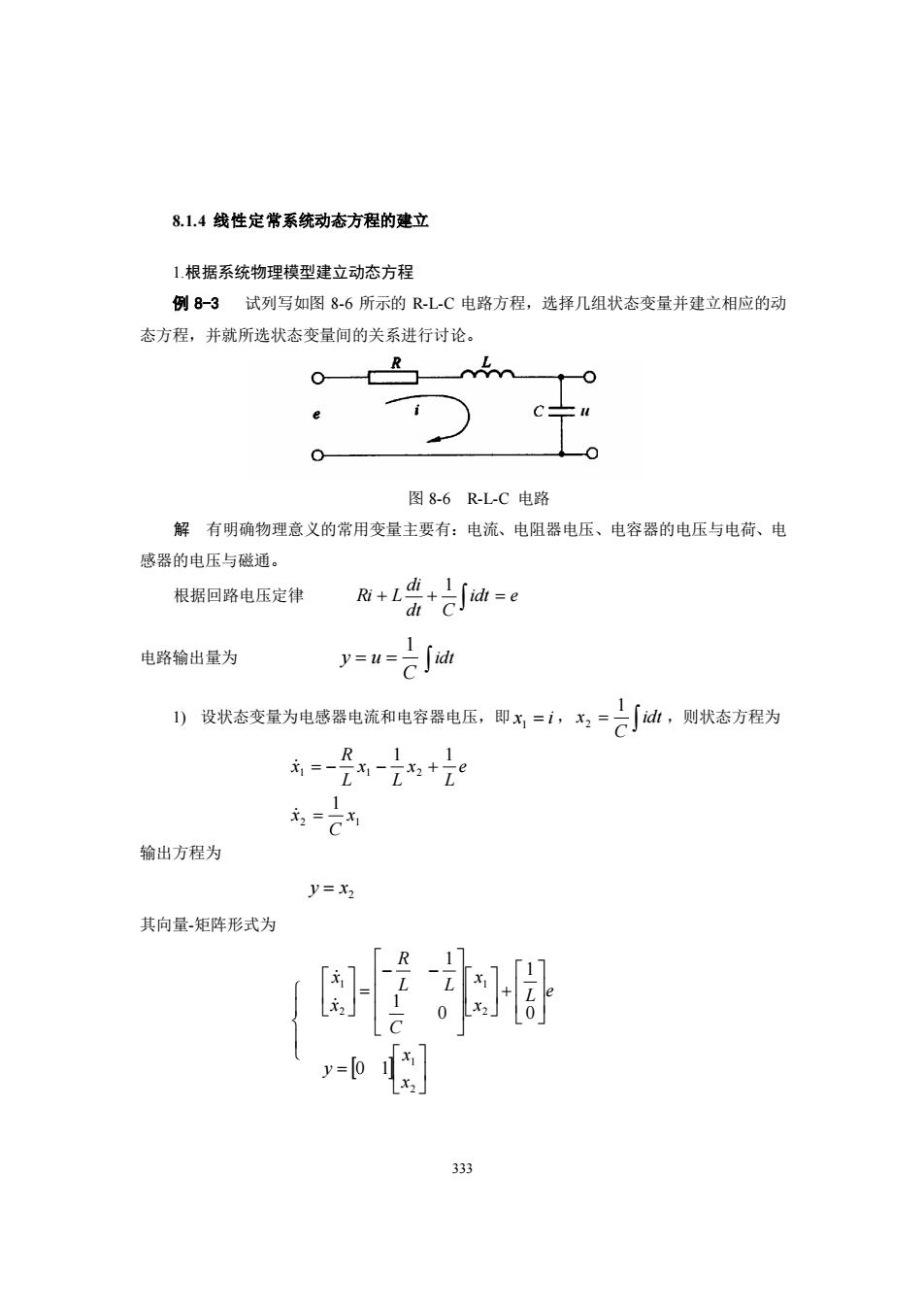
8.1.4线性定常系统动态方程的建立 1.根据系统物理模型建立动态方程 例8-3试列写如图8-6所示的R-LC电路方程,选择几组状态变量并建立相应的动 态方程,并就所选状态变量间的关系进行讨论。 e 0 0 图8-6R-LC电路 解有明确物理意义的常用变量主要有:电流、电阻器电压、电容器的电压与电荷、电 感器的电压与磁通。 根据回路电压定律 8+会+= 电路输出量为 》设状变量为电器电流和电容器电压。即=1名=己山,则状态方程为 名=--+ 输出方程为 y=X2 其向量矩阵形式为 非
333 8.1.4 线性定常系统动态方程的建立 1.根据系统物理模型建立动态方程 例 8-3 试列写如图 8-6 所示的 R-L-C 电路方程,选择几组状态变量并建立相应的动 态方程,并就所选状态变量间的关系进行讨论。 图 8-6 R-L-C 电路 解 有明确物理意义的常用变量主要有:电流、电阻器电压、电容器的电压与电荷、电 感器的电压与磁通。 根据回路电压定律 idt e dt C di Ri + L + = 1 电路输出量为 1 y u C = = idt 1) 设状态变量为电感器电流和电容器电压,即 x = i 1 , = idt C x 1 2 ,则状态方程为 e L x L x L R x 1 1 1 = − 1 − 2 + 2 1 1 x C x = 输出方程为 2 y = x 其向量-矩阵形式为 = + − − = 2 1 2 1 2 1 0 1 0 1 0 1 1 x x y L e x x C L L R x x

简记为 ∫=Ax+b 式中, 2)设状态变量为电容器电流和电荷,即,=,x=∫1d山,则有 卧中 》设状态变量名=己仙+名=己仙,其中,高无明确意义的物理,可 以推出 高-名+定低-+ y=X 其向量矩阵形式为 可见对同一系统,状态变量的选择不具有惟一性, 图87双输入一三输出机械位移系统 动态方程也不是惟一的。 例8-4由质量块、弹簧、阻尼器组成的双输入三输出机械位移系统如图87所示,具 有力F和阻尼器气缸速度V两种外作用,输出量为质量块的位移,速度和加速度。试列写
334 图 8-7 双输入-三输出机械位移系统 简记为 y cx x Ax be = = + 式中, , 0 1 0 1 , 0 1 1 , , 2 1 2 1 = = − − = = = b L c C C L R A x x x x x x 2) 设状态变量为电容器电流和电荷,即 1 2 x i x idt = = , ,则有 1 1 1 2 2 2 1 1 1 , 0 1 0 0 R x x x L LC L e y x x x C − − = + = 3) 设状态变量 1 2 1 1 x idt Ri x idt , C C = + = ,其中, 1 x 无明确意义的物理量,可 以推出 ( ) ( ) 1 1 2 1 2 1 x e L R x x dt RC di x = x + R = − + − + 2 2 1 2 ( ) 1 1 y x x x RC i C x = = = − 其向量-矩阵形式为 = + − − − = 2 1 2 1 2 1 0 1 0 1 1 1 1 x x y L e R x x RC RC L RC R RC x x 可见对同一系统,状态变量的选择不具有惟一性, 动态方程也不是惟一的。 例 8-4 由质量块、弹簧、阻尼器组成的双输入三输出机械位移系统如图 8-7 所示,具 有力 F 和阻尼器气缸速度 V 两种外作用,输出量为质量块的位移,速度和加速度。试列写