
6.1 问题的提出 6.2 状态反馈 6.3 极点配置问题 6.4 状态观测器 6.5 线性二次最优控制
文件格式: PDF大小: 506.98KB页数: 28
上海交通大学:《现代控制理论 Modern Control Theory》课程教学资源(课件讲稿)第五章 系统稳定性
文件格式: PDF大小: 335.8KB页数: 11

4.1 问题的提出 4.2 能控性的定义 4.3 能控性的判定 4.4 能观性的定义 4.5 能控性、能观性与传递函数矩阵的关系 4.6 用MATLAB判定能控性能观性
文件格式: PDF大小: 432.77KB页数: 23

3.1 分析的目的 3.2 零输入响应 3.3 零状态响应 3.4 用MATLAB求线性系统的响应
文件格式: PDF大小: 377.34KB页数: 16
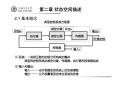
2.1 基本概念 2.2 采用机理分析法建立状态空间模型 2.3 由传递函数求状态空间模型 2.4 由状态空间模型求传递函数 2.5 采用MATLAB进行模型转换 2.6 非线性系统的线性化 2.7 组合系统
文件格式: PDF大小: 663.79KB页数: 53
上海交通大学:《现代控制理论 Modern Control Theory》课程教学资源(课件讲稿)第一章 绪论
文件格式: PDF大小: 480.02KB页数: 5

控制系统的校正方法 • 概述 • 超前校正和滞后校正 • PID调节器 本章基本要求: 理解串联校正的含义; 掌握超前校正原理; 掌握滞后校正原理; 掌握比例、积分、微分、比例积分、比例微分、比例积分; 微分控制规律;
文件格式: PDF大小: 968.46KB页数: 43

控制系统的频域分析法: • 频率特性 • Bode图 • 最小相位系统 • 性能分析 本章基本要求: 了解频率特性的基本概念,掌握其不同的表示方法; 了解典型环节的频率特性; 熟练掌握Bode图的绘制方法; 理解和掌握奈氏稳定判据,会用奈氏判据判断系统的稳定性; 熟练掌握系统稳定裕量的物理含义和计算方法; 建立开环频率特性和系统性能指标之间的对应关系,能够定性地分析系统的性能;
文件格式: PDF大小: 799.4KB页数: 56

控制系统的时域分析法 • 稳定性 • 稳态性能 • 动态性能 本章小结: 闭环系统稳定性 • 工程系统能正常工作的前提必须是稳定的 • 劳斯稳定性判据 系统稳态特性 • 系统的控制精度问题 • 稳态误差系数:位置误差系数、速度误差系数、加速度误差系数 • 稳态误差系数由系统的结构和参数决定 • 结构:开环系统中所含有积分器的数量 • 参数:系统的开环增益 系统动态特性 • 动态性能指标:超调量,调整时间,上升时间和延迟时间 • 逼近性:超调量和调整时间 • 快速性:上升时间和延迟时间 • 二阶系统的动态响应:阻尼比和无阻尼振荡角频率 • 高阶系统的动态特性可以用主导极点近似
文件格式: PDF大小: 1.11MB页数: 75

控制系统的数学模型 • 概述 • 传递函数 • 典型环节 • 方块图 • 常用的传递函数 本章基本要求: 掌握控制系统微分方程式建立的一般方法; 正确理解传递函数的定义、性质和意义; 理解系统的开环传递函数、闭环传递函数、对控制和对干扰的传递函数、误差传递函数及典型环节的传递函数等概念,并掌握其求解方法; 掌握结构变换的基本规则,并能正确且熟练的运用进行方框图简化;
文件格式: PDF大小: 635.55KB页数: 43