
KL变换原理 /956 自2 u是确定性向量,则公式写为: 号=∑uar7, 00 令:平=E[x]有:ξ=∑4平4, j=d+l 欲使该均方误差ξ为最小,即在确保正交变 换的条件下,使ξ达最小的问题,这可用拉格 朗日乘子法求解。 电子科技大学研究生《模式识别与机器学习》
电子科技大学研究生《模式识别与机器学习》 uj是确定性向量,则公式写为: 令: 欲使该均方误差x为最小,即在确保正交变 换的条件下,使x 达最小的问题,这可用拉格 朗日乘子法求解。 有: K-L变换原理
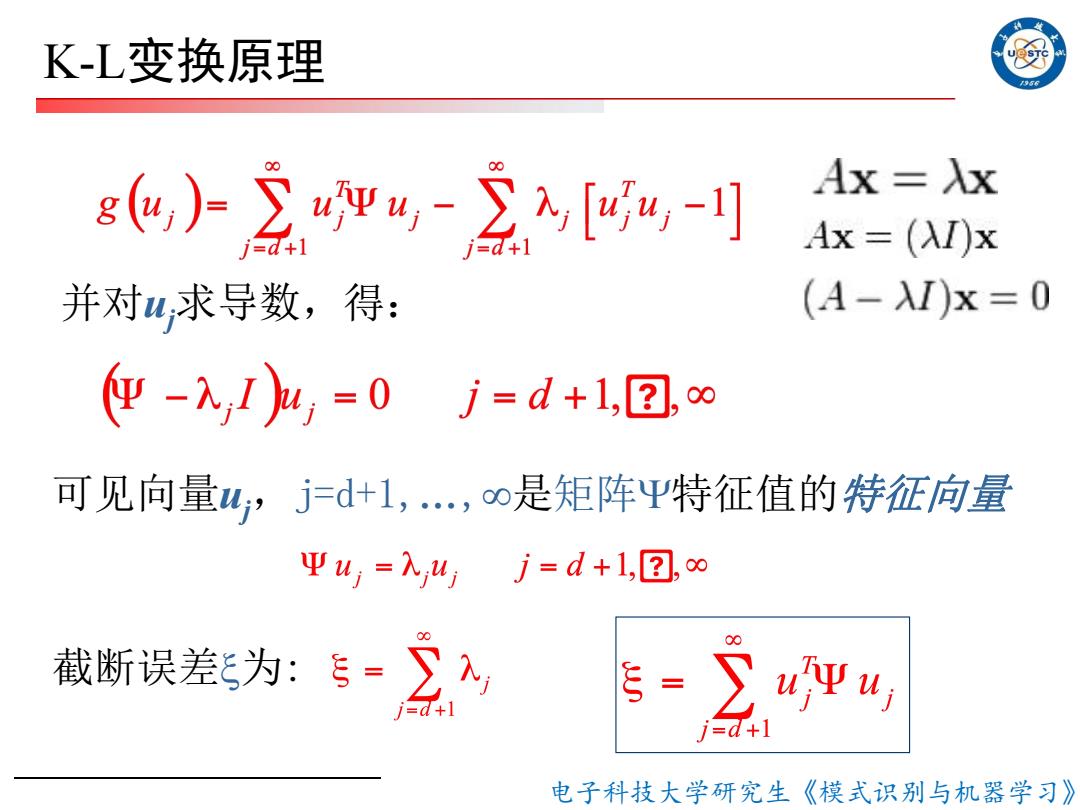
K-L变换原理 号5 ga,)w4,-[四4,-刂 AX=λx Ax=(A)x 并对u,求导数,得: (A-AI)x=0 厘-入I)4,=0 j=d+1,回,∞ 可见向量4,d+1,,o是矩阵Ψ特征值的特征向量 Ψ4,=入,4,j=d+1,包∞ 00 截断误差ξ为:5=∑入 ξ= Ψ4 j=d+l 电子科技大学研究生《模式识别与机器学习》
电子科技大学研究生《模式识别与机器学习》 并对uj求导数,得: 可见向量uj,j=d+1,…,¥是矩阵Y特征值的特征向量 截断误差x为: K-L变换原理
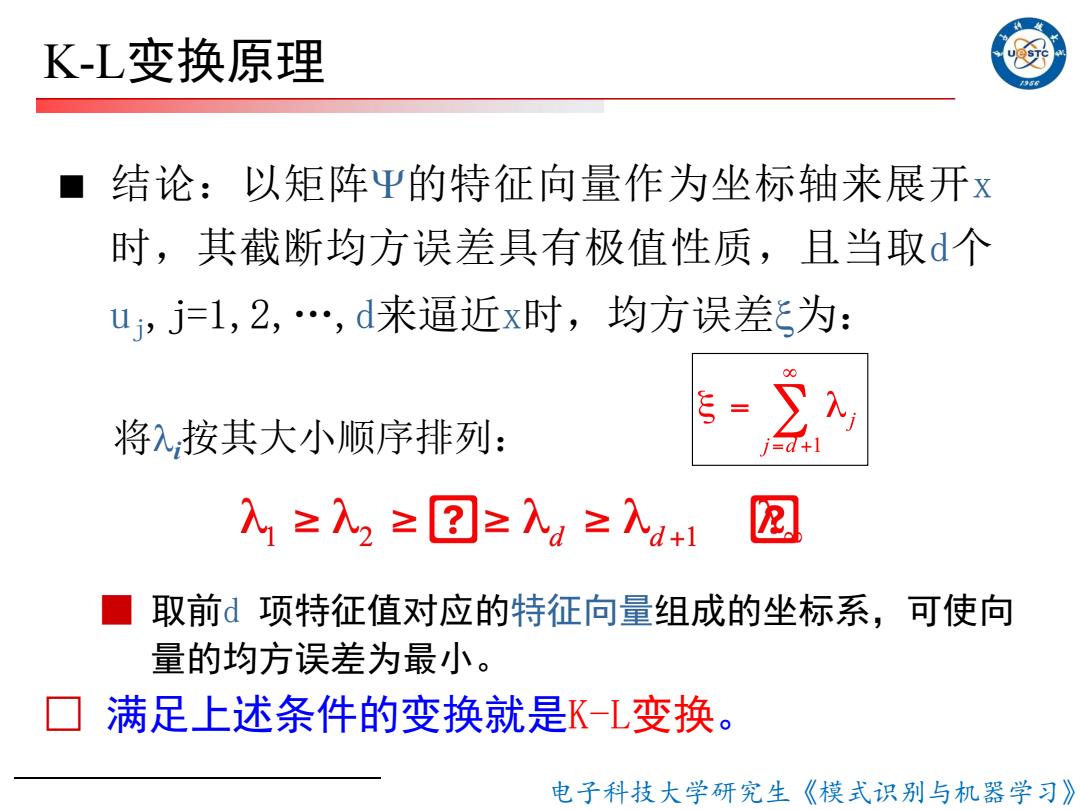
K-L变换原理 结论:以矩阵平的特征向量作为坐标轴来展开x 时,其截断均方误差具有极值性质,且当取d个 u,j1,2,…,d来逼近x时,均方误差为: 将入按其大小顺序排列: 1+ 入12入2≥☒≥入≥入4+ ■取前d项特征值对应的特征向量组成的坐标系,可使向 量的均方误差为最小。 ☐满足上述条件的变换就是K-L变换。 电子科技大学研究生《模式识别与机器学习》
电子科技大学研究生《模式识别与机器学习》 ■ 取前d 项特征值对应的特征向量组成的坐标系,可使向 量的均方误差为最小。 □ 满足上述条件的变换就是K-L变换。 将li按其大小顺序排列: ■ 结论:以矩阵Y的特征向量作为坐标轴来展开x 时,其截断均方误差具有极值性质,且当取d个 uj,j=1,2,…,d来逼近x时,均方误差x为: K-L变换原理
基于K-L变换的特征提取 口基本步骤: ■对N个样本(特征向量),求产生矩阵Ψ。 ■对矩阵Ψ,求N个本征值与本征向量。 ■将N个本征值按值的大小的顺序排列。 ■取M个本征值(本征向量),组成新的变换矩 阵Φ ■ywΦTxw代替原来的特征向量。 14 电子科技大学研究生《模式识别与机器学习》
电子科技大学研究生《模式识别与机器学习》 □基本步骤: ■对N个样本(特征向量),求产生矩阵Y。 ■对矩阵Y,求N 个本征值与本征向量。 ■将N 个本征值按值的大小的顺序排列。 ■取M个本征值(本征向量),组成新的变换矩 阵F ■yM=FTxN 代替原来的特征向量。 14 基于K-L变换的特征提取

KL变换原理 口K-L变换的基并没有固定的形式,它是从对给定数据集{x} 进行计算产生的。给定的数据集不同,得到的K-L变换基函 数也因此而不同 口☐由于它对给定数据集{x}存在依赖关系,它能在降低维数时 仍能较好地描述数据,因此是模式识别中降低特征空间维 数的有效方法。 15 电子科技大学研究生《模式识别与机器学习》
电子科技大学研究生《模式识别与机器学习》 □K-L变换的基并没有固定的形式,它是从对给定数据集{x} 进行计算产生的。给定的数据集不同,得到的K-L变换基函 数也因此而不同 □由于它对给定数据集{x}存在依赖关系,它能在降低维数时 仍能较好地描述数据,因此是模式识别中降低特征空间维 数的有效方法。 15 K-L变换原理