2 University of Electronic Science Technology of China(UESTC) Case Analysis:Use DARTS to Design a S/W System of Robot Controller Real-Time Systems Lab LIAO Yong
2 Real-Time Systems Lab LIAO Yong University of Electronic Science & Technology of China (UESTC) Case Analysis: Use DARTS to Design a S/W System of Robot Controller
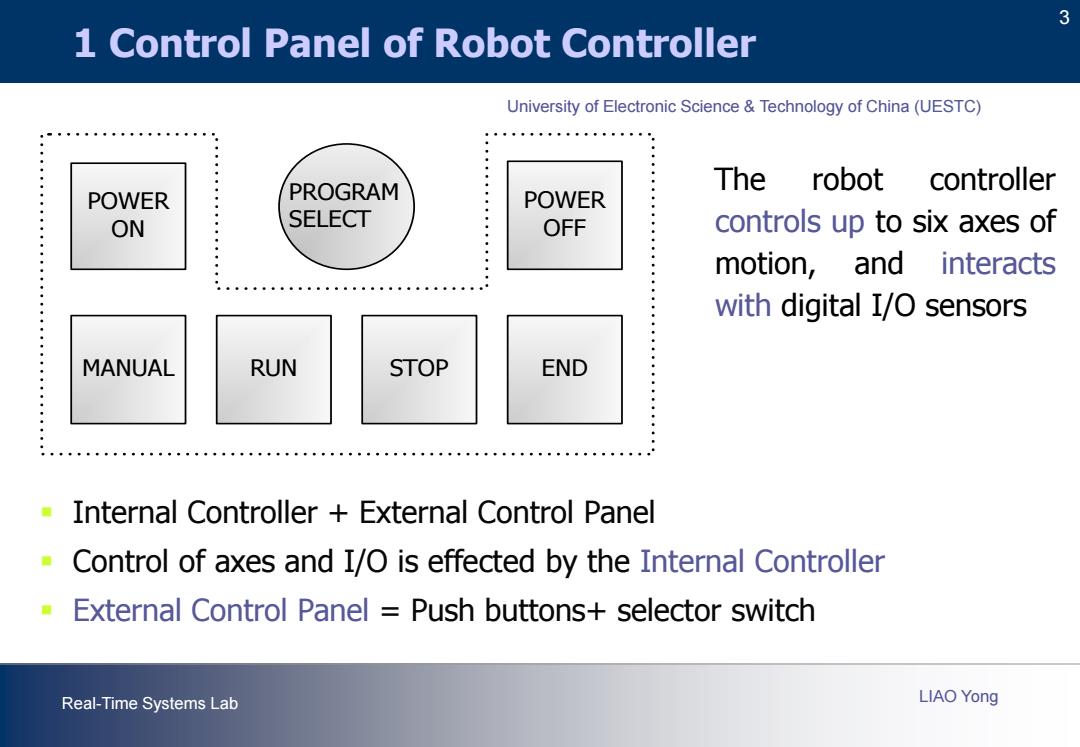
3 1 Control Panel of Robot Controller University of Electronic Science Technology of China(UESTC) PROGRAM : The robot controller POWER POWER ON SELECT OFF controls up to six axes of motion,and interacts with digital I/O sensors MANUAL RUN STOP END Internal Controller External Control Panel Control of axes and I/O is effected by the Internal Controller External Control Panel Push buttons+selector switch Real-Time Systems Lab LIAO Yong
3 Real-Time Systems Lab LIAO Yong University of Electronic Science & Technology of China (UESTC) 1 Control Panel of Robot Controller Internal Controller + External Control Panel Control of axes and I/O is effected by the Internal Controller External Control Panel = Push buttons+ selector switch The robot controller controls up to six axes of motion, and interacts with digital I/O sensors POWER ON PROGRAM SELECT MANUAL RUN STOP END POWER OFF
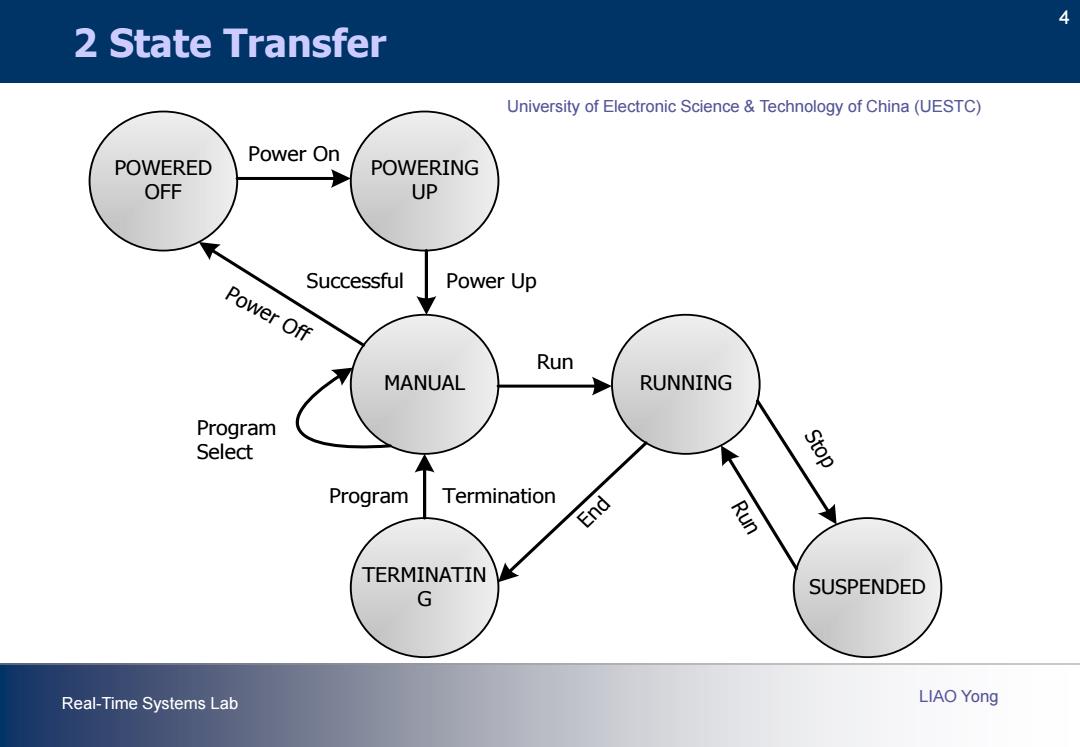
4 2 State Transfer University of Electronic Science Technology of China(UESTC) Power On POWERED POWERING OFF UP Successful Power Up Power Off Run MANUAL RUNNING Program Select 堂 Program Termination End TERMINATIN G SUSPENDED Real-Time Systems Lab LIAO Yong
4 Real-Time Systems Lab LIAO Yong University of Electronic Science & Technology of China (UESTC) 2 State Transfer POWERED OFF POWERING UP MANUAL RUNNING TERMINATIN G Power On Run Successful Power Up Program Termination Program Select SUSPENDED Stop Ru En n d Power Off
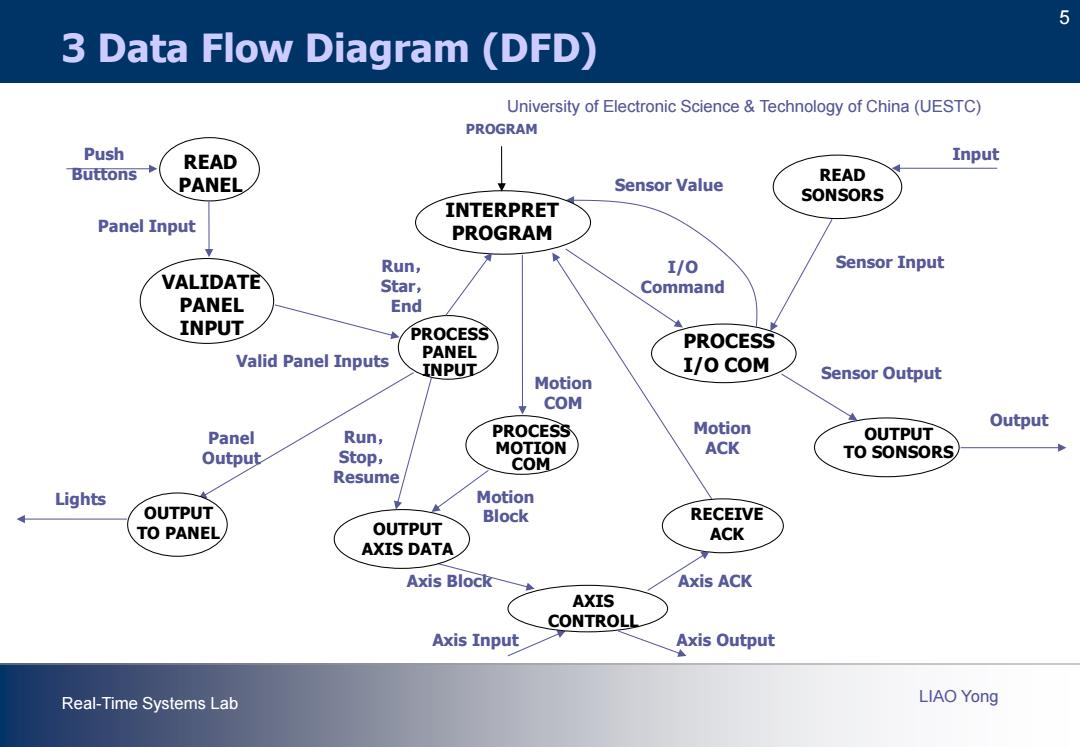
5 3 Data Flow Diagram (DFD) University of Electronic Science Technology of China(UESTC) PROGRAM Push READ Input Buttons PANEL READ Sensor Value SONSORS INTERPRET Panel Input PROGRAM Run, I/o Sensor Input VALIDATE Star, Command PANEL End INPUT PROCESS Valid Panel Inputs PANEL PROCESS INPUT I/O COM Motion Sensor Output COM PROCESS Motion Output Panel Run, OUTPUT Output Stop, MOTION ACK TO SONSORS COM Resume Lights Motion OUTPUT Block RECEIVE TO PANEL OUTPUT ACK AXIS DATA Axis Block Axis ACK AXIS CONTROLL Axis Input Axis Output Real-Time Systems Lab LIAO Yong
5 Real-Time Systems Lab LIAO Yong University of Electronic Science & Technology of China (UESTC) 3 Data Flow Diagram (DFD) READ PANEL Push Buttons VALIDATE PANEL INPUT Panel Input PROCESS PANEL INPUT Valid Panel Inputs READ SONSORS Sensor Value Input Sensor Input PROCESS I/O COM OUTPUT TO SONSORS I/O Command Sensor Output Output PROGRAM INTERPRET PROGRAM Run, Star, End Panel Output OUTPUT TO PANEL Lights Motion ACK RECEIVE ACK Axis ACK Axis Input AXIS CONTROLL Axis Block Axis Output PROCESS MOTION COM OUTPUT AXIS DATA Motion COM Run, Stop, Resume Motion Block
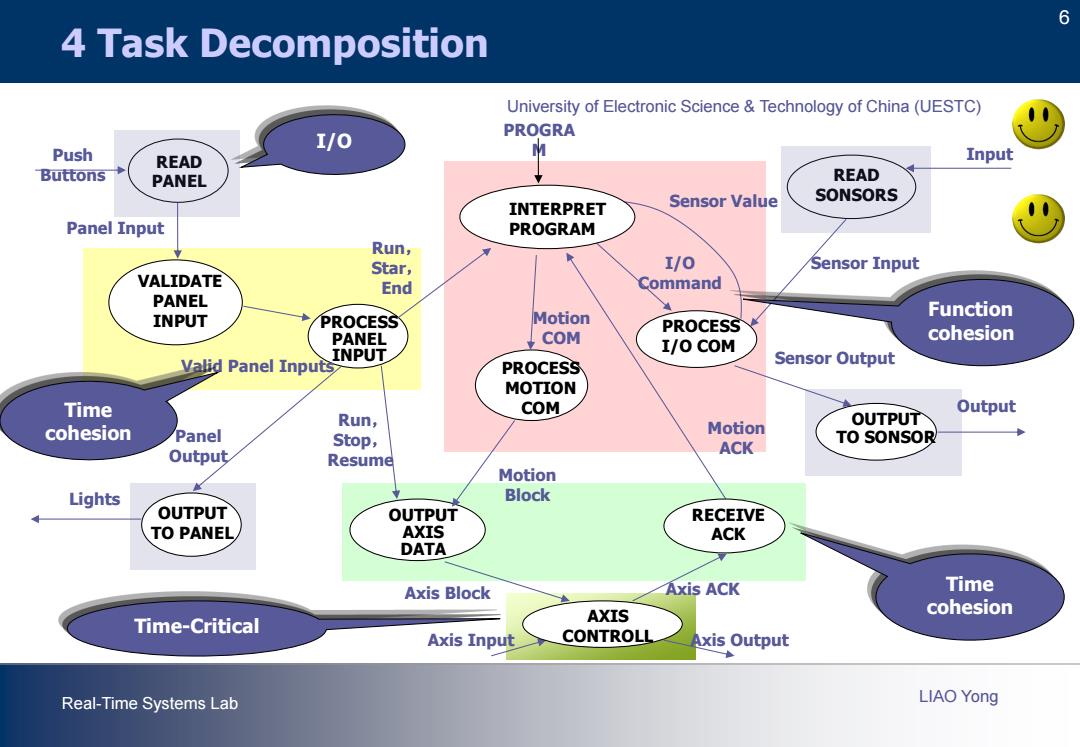
6 4 Task Decomposition University of Electronic Science Technology of China(UESTC) PROGRA I/O Push M READ Input Buttons PANEL READ SONSORS INTERPRET Sensor Value Panel Input PROGRAM Run, Star, I/o Sensor Input VALIDATE End Command PANEL INPUT PROCESS Motion Function PROCESS PANEL COM cohesion INPUT I/O COM yali时Panel Input PROCESS Sensor Output MOTION Time COM Output Run, Motion OUTPUT cohesion Panel Stop, TO SONSOR Output ACK Resume Motion Lights Block OUTPUT OUTPUT RECEIVE TO PANEL AXIS ACK DATA Axis Block Axis ACK Time cohesion Time-Critical AXIS Axis Input CONTROLL Axis Output Real-Time Systems Lab LIAO Yong
6 Real-Time Systems Lab LIAO Yong University of Electronic Science & Technology of China (UESTC) 4 Task Decomposition READ PANEL Push Buttons VALIDATE PANEL INPUT Panel Input PROCESS PANEL INPUT Valid Panel Inputs READ SONSORS Sensor Value Input Sensor Input PROCESS I/O COM OUTPUT TO SONSOR I/O Command Sensor Output Output PROGRA M INTERPRET PROGRAM Run, Star, End Panel Output OUTPUT TO PANEL Lights Motion ACK RECEIVE ACK Axis ACK Axis Input AXIS CONTROLL Axis Block Axis Output PROCESS MOTION COM OUTPUT AXIS DATA Motion COM Run, Stop, Resume Motion Block I/O Time cohesion Function cohesion Time cohesion Time-Critical