
(1)常用编码方式 比特流 不归零制 归零制 曼彻斯特 差分 曼彻斯特 数字信号常用的编码方式
(1) 常用编码方式 不归零制 曼彻斯特 比特流 1 0 0 0 1 0 0 1 1 1 差分 曼彻斯特 归零制 数字信号常用的编码方式

(1)常用编码方式 从信号波形中可以看出,曼彻斯特 (Manchester)编码和差分曼彻斯特编码产生的 信号频率比不归零制高。 从自同步能力来看,不归零制不能从信号波形 本身中提取信号时钟频率(这叫作没有自同步 能力),而曼彻斯特编码和差分曼彻斯特编码 具有自同步能力
(1) 常用编码方式 从信号波形中可以看出,曼彻斯特 (Manchester) 编码和差分曼彻斯特编码产生的 信号频率比不归零制高。 从自同步能力来看,不归零制不能从信号波形 本身中提取信号时钟频率(这叫作没有自同步 能力),而曼彻斯特编码和差分曼彻斯特编码 具有自同步能力
(2)基本的带通调制方法 30 基带信号往往包含有较多的低频成分,甚至有 直流成分,而许多信道并不能传输这种低频分 量或直流分量。为了解决这一问题,就必须对 基带信号进行调制(modulation)。 最基本的二元制调制方法有以下几种: 调幅(AM):载波的振幅随基带数字信号而变化。 ·调频(FM):载波的频率随基带数字信号而变化。 ■调相(PM):载波的初始相位随基带数字信号而变化
(2) 基本的带通调制方法 基带信号往往包含有较多的低频成分,甚至有 直流成分,而许多信道并不能传输这种低频分 量或直流分量。为了解决这一问题,就必须对 基带信号进行调制 (modulation)。 最基本的二元制调制方法有以下几种: 调幅(AM):载波的振幅随基带数字信号而变化。 调频(FM):载波的频率随基带数字信号而变化。 调相(PM) :载波的初始相位随基带数字信号而变化

(2)基本的带通调制方法 基带信号 0 11 0 调幅 调频 AAM 调相 4AMMA 最基本的三种调制方式
(2) 基本的带通调制方法 基带信号 0 1 0 0 1 1 1 0 0 调幅 调频 调相 最基本的三种调制方式
正交振幅调制QAM (Quadrature Amplitude Modulation) 举例 为了达到更高的信息传输速率,必须采 用技术上更为复杂的多元制的振幅相位 混合调制方法。 例如: D 可供选择的相位有12种,而对于每一种相 位有1或2种振幅可供选择。总共有16种 组合,即16个码元。 由于4bit编码共有16种不同的组合,因此 这16个点中的每个点可对应于一种4bit的 编码。数据传输率可提高4倍。 不是码元越多越好。若每一个码元可表示的比特数越多,则在接收 端进行解调时要正确识别每一种状态就越困难,出错率增加
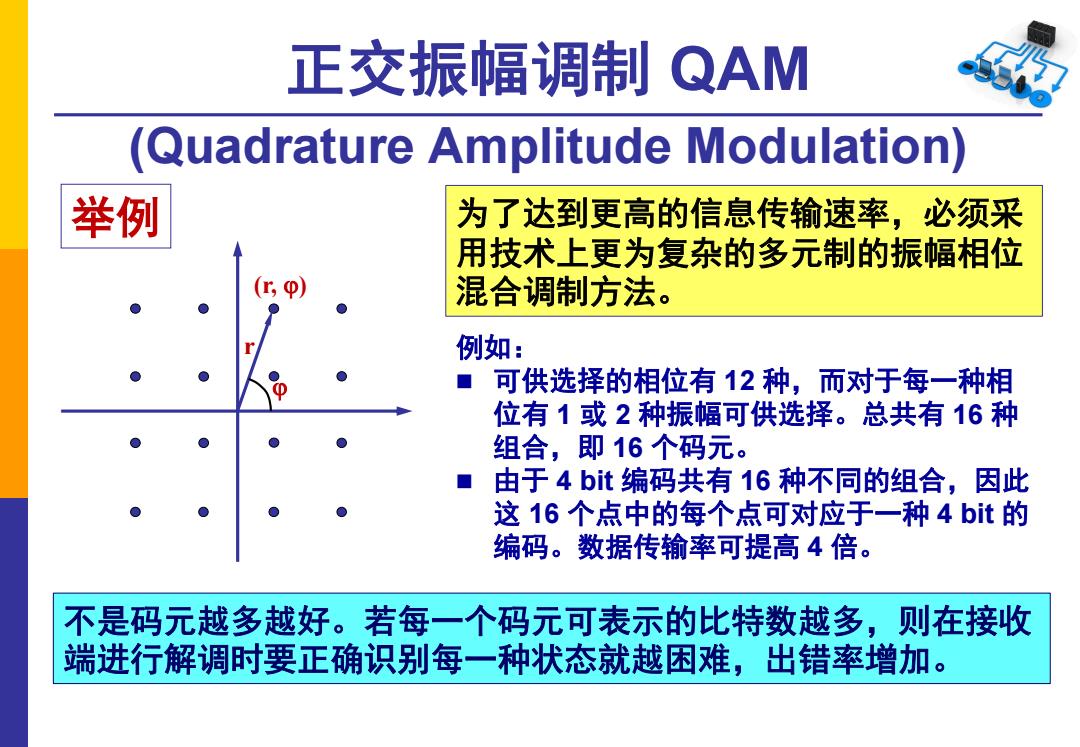
正交振幅调制 QAM (Quadrature Amplitude Modulation) r (r, ) 不是码元越多越好。若每一个码元可表示的比特数越多,则在接收 端进行解调时要正确识别每一种状态就越困难,出错率增加。 举例 为了达到更高的信息传输速率,必须采 用技术上更为复杂的多元制的振幅相位 混合调制方法。 例如: 可供选择的相位有 12 种,而对于每一种相 位有 1 或 2 种振幅可供选择。总共有 16 种 组合,即 16 个码元。 由于 4 bit 编码共有 16 种不同的组合,因此 这 16 个点中的每个点可对应于一种 4 bit 的 编码。数据传输率可提高 4 倍