哈尔滨工业大学工学硕士学位论文 图1-17 Festo公司的仿生蝠鲼 在已成功研制出仿生蝠鲼样机的基础上,Fsto公司于2012年以企鹅为仿生对 象,设计了一套仿企鹅实验装置2,如图1-18所示,该实验装置可实现水中正常 游动,最大速度0.2m/s。 图1-18 Festo公司的仿生企鹅 1.2.3现有研究存在的问题 仿生机器鱼的研究已经成为当今仿生学研究领域的热点,但是目前对鱼类的 仿生研究主要集中在对BC℉推进模式鱼类的研究上,而针对MP℉推进模式鱼类的 研究,尤其是对以胸鳍波动方式推进的鳐鱼的研究较少。鳐鱼具有高机动性、扰 动小等优点,针对该种鱼进行仿生学研究是十分必要的。 本文将以鳐鱼作为仿生对象进行实验研究,设计仿生鳐鱼胸鳍波动推进实验 装置进行相关实验,研究和分析各个实验参数对仿生鳐鱼游动性能的影响,具有 非常重要的意义。 13本课题主要研究内容 1)设计仿生鳐鱼本体样机 参照鳐鱼的扁平体外形和胸鳍波动推进模式的运动形式,根据已提出的鳐鱼 运动学模型,采用合理的扁平体外形,兼顾外形的流线型设计,选择高弹性、低 硬度的胸鳍材料,选择仿生鳐鱼的驱动系统并设计合理的传动机构,实现对鳐鱼 胸鳍波动运动的模仿。 -9. 万方数据
哈尔滨工业大学工学硕士学位论文 -9- 图 1-17 Festo 公司的仿生蝠鲼 在已成功研制出仿生蝠鲼样机的基础上,Festo 公司于 2012 年以企鹅为仿生对 象,设计了一套仿企鹅实验装置[26],如图 1-18 所示,该实验装置可实现水中正常 游动,最大速度 0.2m/s。 图 1-18 Festo 公司的仿生企鹅 1.2.3 现有研究存在的问题 仿生机器鱼的研究已经成为当今仿生学研究领域的热点,但是目前对鱼类的 仿生研究主要集中在对 BCF 推进模式鱼类的研究上,而针对 MPF 推进模式鱼类的 研究,尤其是对以胸鳍波动方式推进的鳐鱼的研究较少。鳐鱼具有高机动性、扰 动小等优点,针对该种鱼进行仿生学研究是十分必要的。 本文将以鳐鱼作为仿生对象进行实验研究,设计仿生鳐鱼胸鳍波动推进实验 装置进行相关实验,研究和分析各个实验参数对仿生鳐鱼游动性能的影响,具有 非常重要的意义。 1.3 本课题主要研究内容 1)设计仿生鳐鱼本体样机 参照鳐鱼的扁平体外形和胸鳍波动推进模式的运动形式,根据已提出的鳐鱼 运动学模型,采用合理的扁平体外形,兼顾外形的流线型设计,选择高弹性、低 硬度的胸鳍材料,选择仿生鳐鱼的驱动系统并设计合理的传动机构,实现对鳐鱼 胸鳍波动运动的模仿。 万方数据
哈尔滨工业大学工学硕士学位论文 2)进行仿生鳐鱼推进性能的实验研究 通过控制变量法,分别改变仿生鳐鱼的波动频率、波动振幅和胸鳍波数,测 量仿生鳐鱼的推进速度和推进力等主要推进性能指标,分析上述关键运动参数对 仿生鳐鱼的推进速度和推进力的影响作用。 3)进行仿生鳐鱼的机动性能的实验研究 以仿生鳐鱼的机动性能为研究目标设计实验,主要包括转弯实验和逆向游动 实验,通过实验测量仿生鳐鱼进行转弯动作时的平均转弯角速度等主要性能参数, 分析波动频率、波动振幅和胸鳍波数对转弯性能的影响,并通过逆向游动实验从 另一角度验证胸鳍波动推进模式的优越机动性能。 1.4技术难点分析 1)机械结构的设计 仿生鱼机械结构的设计优劣直接关系到模仿鳐鱼运动的实现。在进行仿生鱼 结构设计的过程中,要尽量参考鳐鱼的鱼体外形,根据外形仿生的要求设计仿生 鱼的形状:同时,充分观察鳐鱼胸鳍的运动形式,进行合理的抽象和简化,提取 出合理的胸鳍运动模型,设计合适的机构实现胸鳍的该仿生运动。 2)材料的选择 本文中设计的仿生鳐鱼采用胸鳍波动推进模式,胸鳍的柔性变形产生行波并 向后传播是仿生鳐鱼运动的动力来源。本文要求胸鳍所选用的材料满足高弹性、 低硬度等要求,低硬度要求保证胸鳍具有足够的柔性,高弹性要求保证仿生鳐鱼 胸鳍能够产生足够的柔性变形。 3)仿生鳐鱼鱼体摆动、翻转和倾覆问题的避免 在仿生鱼的设计过程中,要充分考虑到各个部分的质量分配,合理分配胸鳍 质量和鱼体各部分质量,保证合理的鱼体胸鳍质量比,减小运动过程中鱼体的摆 动:同时,合理布置各个部分的位置,保证仿生鳐鱼的重心和浮心位置沿弦向和 展向重合,在纵向方向上,重心在下,浮心在上,保证鱼体在运动过程中的稳定 性,防止鱼体翻转和倾覆的出现。 4)防水密封问题的处理 仿生鳐鱼的外形模仿鳐鱼的扁平体外形,同时鱼体内部有电机和其他传动部 件,必须合理的处理各个部位的防水静密封和动密封问题。在进行设计的过程中, 要考虑不同部位的密封形式和特点,按照不同密封部位采用不同密封方法的原则, 分类处理,做好各个部位的防水密封处理。 -10- 万方数据
哈尔滨工业大学工学硕士学位论文 -10- 2)进行仿生鳐鱼推进性能的实验研究 通过控制变量法,分别改变仿生鳐鱼的波动频率、波动振幅和胸鳍波数,测 量仿生鳐鱼的推进速度和推进力等主要推进性能指标,分析上述关键运动参数对 仿生鳐鱼的推进速度和推进力的影响作用。 3)进行仿生鳐鱼的机动性能的实验研究 以仿生鳐鱼的机动性能为研究目标设计实验,主要包括转弯实验和逆向游动 实验,通过实验测量仿生鳐鱼进行转弯动作时的平均转弯角速度等主要性能参数, 分析波动频率、波动振幅和胸鳍波数对转弯性能的影响,并通过逆向游动实验从 另一角度验证胸鳍波动推进模式的优越机动性能。 1.4 技术难点分析 1)机械结构的设计 仿生鱼机械结构的设计优劣直接关系到模仿鳐鱼运动的实现。在进行仿生鱼 结构设计的过程中,要尽量参考鳐鱼的鱼体外形,根据外形仿生的要求设计仿生 鱼的形状;同时,充分观察鳐鱼胸鳍的运动形式,进行合理的抽象和简化,提取 出合理的胸鳍运动模型,设计合适的机构实现胸鳍的该仿生运动。 2)材料的选择 本文中设计的仿生鳐鱼采用胸鳍波动推进模式,胸鳍的柔性变形产生行波并 向后传播是仿生鳐鱼运动的动力来源。本文要求胸鳍所选用的材料满足高弹性、 低硬度等要求,低硬度要求保证胸鳍具有足够的柔性,高弹性要求保证仿生鳐鱼 胸鳍能够产生足够的柔性变形。 3)仿生鳐鱼鱼体摆动、翻转和倾覆问题的避免 在仿生鱼的设计过程中,要充分考虑到各个部分的质量分配,合理分配胸鳍 质量和鱼体各部分质量,保证合理的鱼体胸鳍质量比,减小运动过程中鱼体的摆 动;同时,合理布置各个部分的位置,保证仿生鳐鱼的重心和浮心位置沿弦向和 展向重合,在纵向方向上,重心在下,浮心在上,保证鱼体在运动过程中的稳定 性,防止鱼体翻转和倾覆的出现。 4)防水密封问题的处理 仿生鳐鱼的外形模仿鳐鱼的扁平体外形,同时鱼体内部有电机和其他传动部 件,必须合理的处理各个部位的防水静密封和动密封问题。在进行设计的过程中, 要考虑不同部位的密封形式和特点,按照不同密封部位采用不同密封方法的原则, 分类处理,做好各个部位的防水密封处理。 万方数据
哈尔滨工业大学工学硕士学位论文 第2章鳐鱼的仿生学基础及动力学模型 本课题研究目的在于以鳐鱼作为仿生对象,设计一套仿生鳐鱼实验装置,并 通过该装置实现模仿鳐鱼的胸鳍波动运动。在进行实验装置设计之前,有必要以 仿生对象活体作为观察对象,测量其外形轮廓尺寸,以此为依据建立相应的物理 学模型,并观察和分析该类鳐鱼的运动形式,针对其运动形式进行抽象和简化, 提出适合描述鳐鱼运动的数学模型,以上述建立的物理模型和数学模型作为仿生 鱼结构设计的基础和依据。 2.1仿生对象的介绍 鳐鱼属软骨鱼纲、鳐形目,又名魔鬼鱼,可细分为鳐亚目和犁头鳐亚目,包 括孔鳐、团扇鳐、尖齿锯鳐、尖头犁头鳐等常见类型7,2),如图2-1所示。以孔鳐 鱼和团扇鳐为例,该鳐亚目鱼类通常鱼体外形扁平,胸鳍宽大,体型展向尺寸较 大,尾鳍退化为扁平细长形状,为温带杂食性海洋生物,大多以虾类或者乌贼等 生物为食2叨,且习性温顺,不喜游动,几乎与人无害,适合于海洋底部栖息,捕 食猎物时将身体埋藏于沙中,待猎物靠近时发动突然袭击B0。 孔鳐 团扇鳐 尖齿锯鳐 犁头鳐 图2-1常见鳐鱼的种类 另外,根据鳐亚目鱼类胸鳍形状的不同,可以大致分为类三角形鳐鱼和类圆 形鳐鱼,如图2-2、图2-3所示。按该分类方法,孔鳐、团扇鳐等可作为类三角鳐 鱼的典型代表。 图2-2类三角形鳐鱼 图2-3类圆形鳐鱼 -11- 万方数据
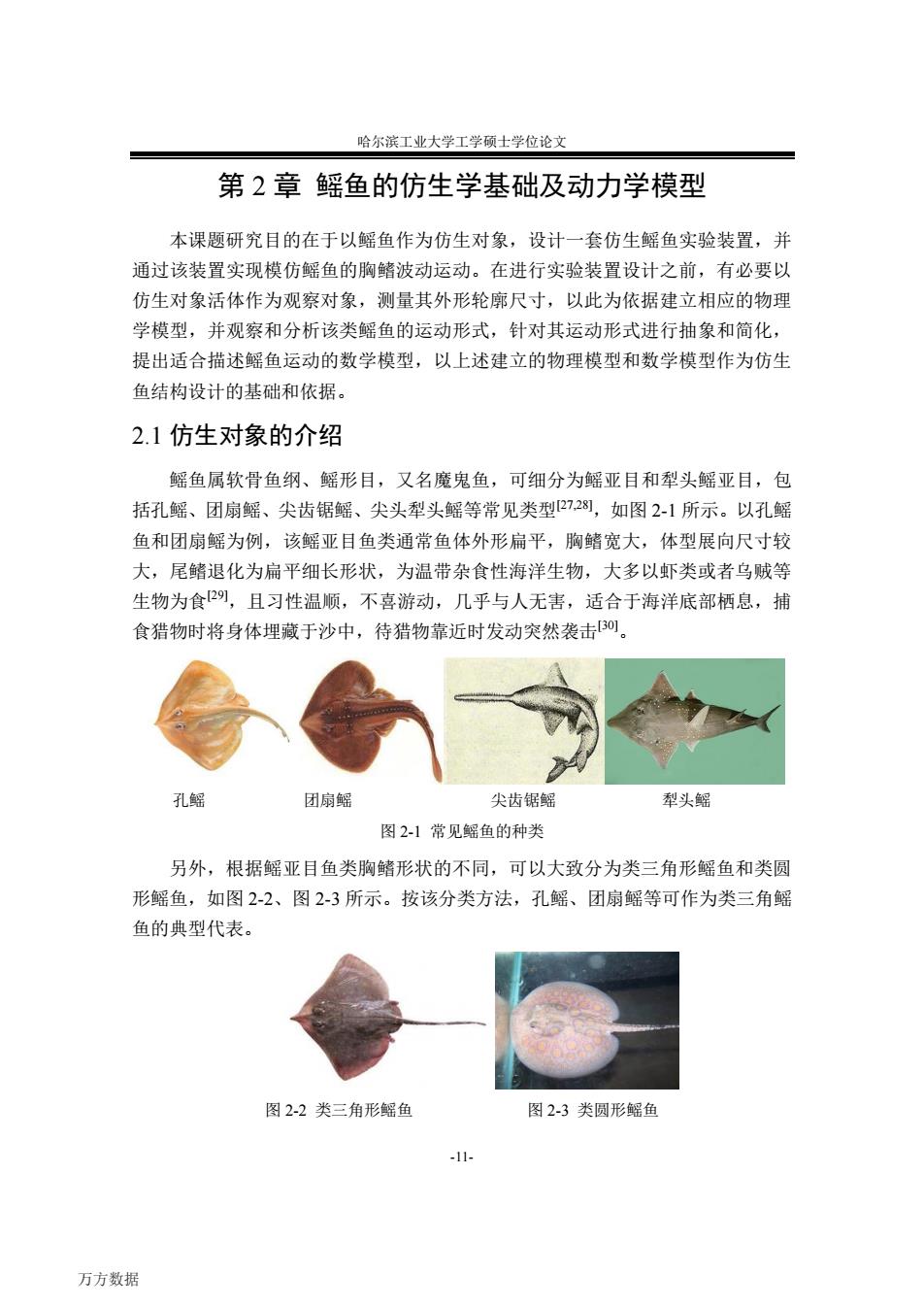
哈尔滨工业大学工学硕士学位论文 -11- 第 2 章 鳐鱼的仿生学基础及动力学模型 本课题研究目的在于以鳐鱼作为仿生对象,设计一套仿生鳐鱼实验装置,并 通过该装置实现模仿鳐鱼的胸鳍波动运动。在进行实验装置设计之前,有必要以 仿生对象活体作为观察对象,测量其外形轮廓尺寸,以此为依据建立相应的物理 学模型,并观察和分析该类鳐鱼的运动形式,针对其运动形式进行抽象和简化, 提出适合描述鳐鱼运动的数学模型,以上述建立的物理模型和数学模型作为仿生 鱼结构设计的基础和依据。 2.1 仿生对象的介绍 鳐鱼属软骨鱼纲、鳐形目,又名魔鬼鱼,可细分为鳐亚目和犁头鳐亚目,包 括孔鳐、团扇鳐、尖齿锯鳐、尖头犁头鳐等常见类型[27,28],如图 2-1 所示。以孔鳐 鱼和团扇鳐为例,该鳐亚目鱼类通常鱼体外形扁平,胸鳍宽大,体型展向尺寸较 大,尾鳍退化为扁平细长形状,为温带杂食性海洋生物,大多以虾类或者乌贼等 生物为食[29],且习性温顺,不喜游动,几乎与人无害,适合于海洋底部栖息,捕 食猎物时将身体埋藏于沙中,待猎物靠近时发动突然袭击[30]。 孔鳐 团扇鳐 尖齿锯鳐 犁头鳐 图 2-1 常见鳐鱼的种类 另外,根据鳐亚目鱼类胸鳍形状的不同,可以大致分为类三角形鳐鱼和类圆 形鳐鱼,如图 2-2、图 2-3 所示。按该分类方法,孔鳐、团扇鳐等可作为类三角鳐 鱼的典型代表。 图 2-2 类三角形鳐鱼 图 2-3 类圆形鳐鱼 万方数据
哈尔滨工业大学工学硕士学位论文 本文以MP℉中央鳍/对鳍模式鱼类的游动作为研究内容,由于孔鳐、团扇鳐等 鳐亚目鱼类胸鳍宽大,且游动方式属于典型的胸鳍波动模式,而犁头鳐鱼类外形 与传统鳐形目鱼类相差较大,且兼顾BC℉身体/尾鳍模式鱼类的外形特点,故本文 以体盘宽大的鳐亚目鱼类作为研究对象。 由于类三角形鳐鱼和类圆形鳐鱼具有类似性,故本文仅以类三角形鳐鱼为对 象进行研究即可。 2.2物理模型的建立 本节将以类三角鳐鱼作为研究对象,以实际鳐鱼样本作为尺寸参考依据,建 立仿生鳐鱼的胸鳍物理模型,并将此物理模型作为制作硅胶胸鳍的参考模型。 本文中仿生对象为类三角形鳐鱼,其外形如图2-4所示,该类鳐鱼整体包括鱼 体部分、两侧胸鳍部分以及尾鞭部分等。鱼体部分产生变形相对胸鳍波动变形来 说很小,可以忽略不计,并且在仿生鱼制作过程中,该部分主要用来放置电机以 及其他传动机构等部件,以鳐鱼活体为参考依据建立的鱼体部分物理学模型不一 定能满足上述要求,故本节中不针对鳐鱼鱼体部分建立物理学模型。尾鞭部分呈 细长状且不产生主动运动,且尾鞭的随动运动对鱼体推进的贡献作用可不予以考 虑31,2该部分主要作用为辅助提高鱼体游动稳定性,保证鱼体位姿平稳,对鳐鱼 整体游动性能影响不大,为简化模型和实验方便,本文中对尾鞭部分不予考虑。 因此,只需要以鳐鱼活体为参考依据,测量鳐鱼胸鳍外形轮廓尺寸,建立两侧胸 鳍外形的物理模型。 图2-4类三角形鳐鱼 对类三角形鳐鱼胸鳍轮廓进行尺寸测量,得出了一系列类三角鳐鱼外形尺寸 参数B),见表2-1,根据该尺寸参数得到胸鳍外轮廓曲线拟合分段函数,见式2-1。 -12- 万方数据
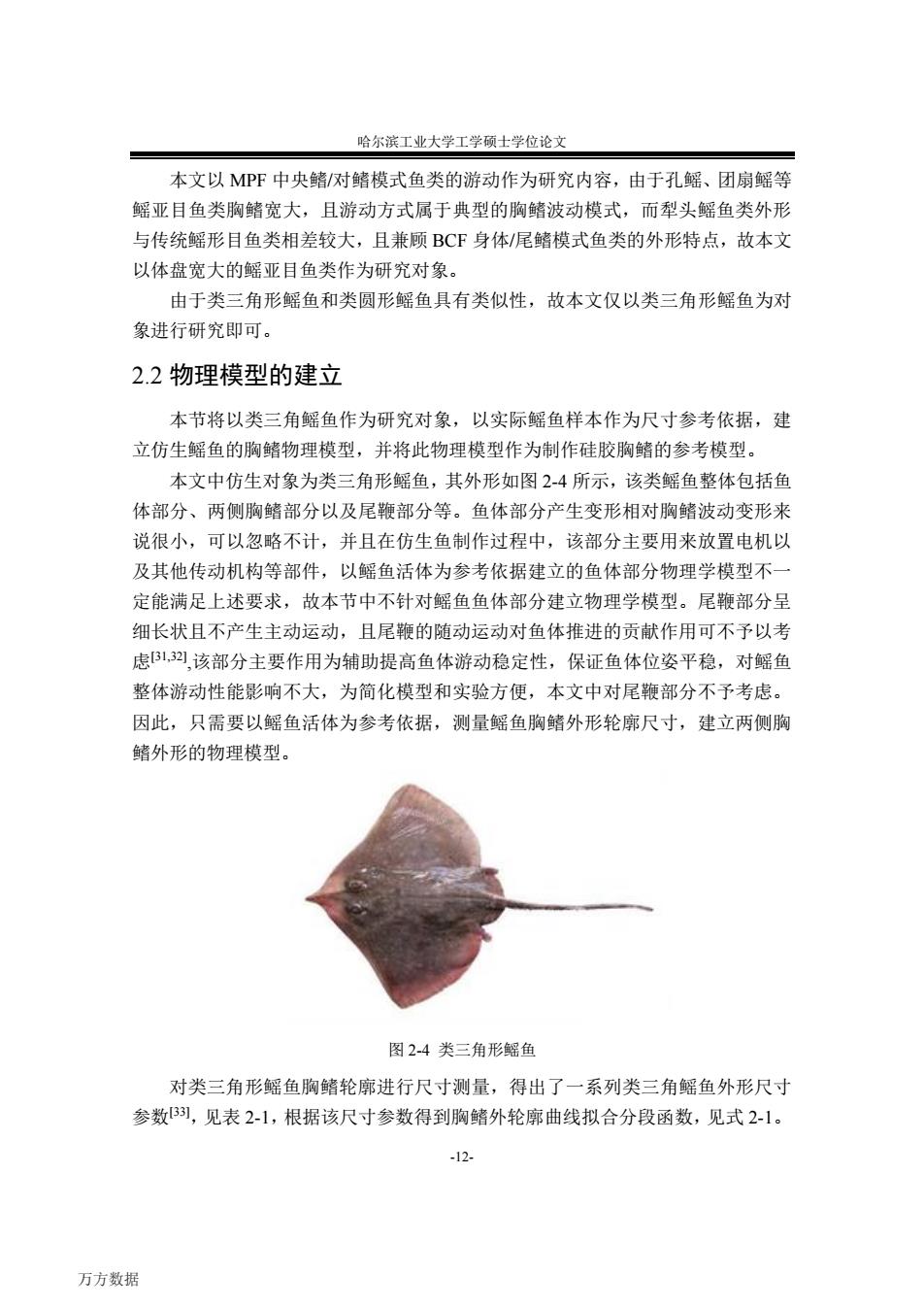
哈尔滨工业大学工学硕士学位论文 -12- 本文以 MPF 中央鳍/对鳍模式鱼类的游动作为研究内容,由于孔鳐、团扇鳐等 鳐亚目鱼类胸鳍宽大,且游动方式属于典型的胸鳍波动模式,而犁头鳐鱼类外形 与传统鳐形目鱼类相差较大,且兼顾 BCF 身体/尾鳍模式鱼类的外形特点,故本文 以体盘宽大的鳐亚目鱼类作为研究对象。 由于类三角形鳐鱼和类圆形鳐鱼具有类似性,故本文仅以类三角形鳐鱼为对 象进行研究即可。 2.2 物理模型的建立 本节将以类三角鳐鱼作为研究对象,以实际鳐鱼样本作为尺寸参考依据,建 立仿生鳐鱼的胸鳍物理模型,并将此物理模型作为制作硅胶胸鳍的参考模型。 本文中仿生对象为类三角形鳐鱼,其外形如图 2-4 所示,该类鳐鱼整体包括鱼 体部分、两侧胸鳍部分以及尾鞭部分等。鱼体部分产生变形相对胸鳍波动变形来 说很小,可以忽略不计,并且在仿生鱼制作过程中,该部分主要用来放置电机以 及其他传动机构等部件,以鳐鱼活体为参考依据建立的鱼体部分物理学模型不一 定能满足上述要求,故本节中不针对鳐鱼鱼体部分建立物理学模型。尾鞭部分呈 细长状且不产生主动运动,且尾鞭的随动运动对鱼体推进的贡献作用可不予以考 虑[31,32] ,该部分主要作用为辅助提高鱼体游动稳定性,保证鱼体位姿平稳,对鳐鱼 整体游动性能影响不大,为简化模型和实验方便,本文中对尾鞭部分不予考虑。 因此,只需要以鳐鱼活体为参考依据,测量鳐鱼胸鳍外形轮廓尺寸,建立两侧胸 鳍外形的物理模型。 图 2-4 类三角形鳐鱼 对类三角形鳐鱼胸鳍轮廓进行尺寸测量,得出了一系列类三角鳐鱼外形尺寸 参数[33],见表 2-1,根据该尺寸参数得到胸鳍外轮廓曲线拟合分段函数,见式 2-1。 万方数据

哈尔滨工业大学工学硕士学位论文 表2-1鳐鱼的外形尺寸参数 种类 样本数量(个)体长(mm) 体宽(mm) 样本来源 Raja 6 220 267 购得 1.2232x2-0.950x-0.0435 (0<x<0.057) -7.7789x2+0.2514x-0.0834 (0.057<x<0.115) 9.5117x2-4.3219x+0.2145 (0.115<x<0.152) z(x)= 29.4735x2-9.9943x+0.6157 (0.152<x<0.192) (2-1) 1.6429x2+0.1596x-0.3079 (0.192<x<0.247) 39.4368x2-18.7702x+2.0628 (0.247<x<0.279) 520.8486x2-288.5913x+39.8708(0.279<x<0.288) 为节约实验成本,本文仿生鳐鱼胸鳍外形轮廓以上述测量结果为参照,按照 相似原则,进行相应的尺寸放大,提出适用于本文中仿生鳐鱼的胸鳍外轮廓曲线 拟合函数,见式2-2。以式2-2作为制作仿生鱼胸鳍的尺寸参考依据,与该式对应 的胸鳍外轮廓曲线如图2-5所示。 /-0.1911×10x2+104.1×x2-1.889x10*x+1.144×10(181<x<188.6) -0.002192x3+1.065x2-174.8x+104 (132<x<181) 6.746×10-5x3-0.02668x2+1.464x+482 z(x)= (35<x<132) (2-2) 7.823×10-5x3-0.02758x2+1.957x+464.3 (-12<x<35) 0.003037x3-0.2087x2+0.04859x+461.9 (-34<x<-12) 0.0001149x3+0.03261x2+4.431x+452.9 (-145.2<x<-34) 350 250 150 1050100-000 100150200 x(Tm) 图2-5鳐鱼胸鳍外形轮廓曲线 -13- 万方数据
哈尔滨工业大学工学硕士学位论文 -13- 表 2-1 鳐鱼的外形尺寸参数 种类 样本数量(个) 体长(mm) 体宽(mm) 样本来源 Raja 6 220 267 购得 2 2 2 2 2 2 2 1.2232x -0.950x -0.0435 -7.7789x +0.2514x -0.0834 9.5117x - 4.3219x+0.2145 z x 29.4735x - 9.9943x+0.6157 1.6429x +0.1596x -0.3079 39.4368x -18.7702x+2.0628 520.8486x - 288.5913x+39.8708 0 < x < 0.057 0.057 < x < 0.115 0.115 < x < 0.152 0.152 < x < 0.192 0.192 < x < 0.247 0.247 < x < 0.279 0.279 < x < 0.288 (2-1) 为节约实验成本,本文仿生鳐鱼胸鳍外形轮廓以上述测量结果为参照,按照 相似原则,进行相应的尺寸放大,提出适用于本文中仿生鳐鱼的胸鳍外轮廓曲线 拟合函数,见式 2-2。以式 2-2 作为制作仿生鱼胸鳍的尺寸参考依据,与该式对应 的胸鳍外轮廓曲线如图 2-5 所示。 -4 3 2 4 6 3 2 4 5 3 2 5 3 2 3 2 3 -0.1911 10 104.1 1.889 10 1.144 10 0.002192 1.065 174.8 10 6.746 10 0.02668 1.464 482 7.823 10 0.02758 1.957 464.3 0.003037 0.2087 0.04859 461.9 0.0001149 0.03261 x x x x x x x x x z x x x x x x x x x 2 4.431 452.9 x 181< x < 188.6 132 < x < 181 35 < x < 132 -12 < x < 35 -34 < x < -12 -145.2 < x < -34 (2-2) 图 2-5 鳐鱼胸鳍外形轮廓曲线 万方数据