
一、多自由度系统的动力学方程 刚度矩阵和质量矩阵 求质量影响系数 动量矩平衡 令6=1,62=0有: mh mz m2lh2 m1=11+m,h2+m,1+h)-m21=1+m,h2+m212 m21+h点) 1, 令6=0,6,=1有: m2g m2=12+m2h2 m12=I2+m2h2(1+h2)-m22=m2lh2 质量矩阵: 8=1 =0 a2=0 =1
26 令 1 1 2 0 , 2 2 2 2 2 21 1 1 1 2 11 1 1 1 21 2 2 m I m h m l(l h ) m I m h m l m m lh 有: 令 1 0 2 1 , 12 2 2 2 2 22 2 2 2 22 2 2 2 m I m h (l h ) m m lh m I m h 有: 求质量影响系数 2 2 2 2 2 2 2 2 2 2 2 1 1 1 m lh I m h I m h m l m lh M 质量矩阵: 动量矩平衡

一、 多自由度系统的动力学方程 刚度矩阵和质量矩阵 求刚度影响系数 力矩平衡 苹 令0=1,02=0 有: k e mgh sine +mglsink=migh +m2gl k2181=m2gl*0 k21=0 令0,=0,02=1 有: m2g m2g k22 m2 ghz kv2 =m2gh2 -k22 =0 8=1 8=0 82=0 62=1 刚度矩阵: 0 27 m2gh2」
27 令 1 1, 2 0 令 1 0, 2 1 22 2 2 k m gh k12 m2 gh2 k22 0 有: 求刚度影响系数 刚度矩阵: 2 2 1 1 2 0 ( ) 0 m gh m h m l g K 力矩平衡 有: 11 1 1 1 1 2 1 k m gh sin m glsin 21 1 2 k m gl 0 0 k21 k m gh m gl 11 1 1 2

一、多自由度系统的动力学方程 刚度矩阵和质量矩阵 蛋 h m2lh2 12+m,h2 0 e h2 运动微分方程: L1+m,h2+m,12, m21h2 28
28 0 0 ( ) 0 2 1 2 2 1 1 2 2 1 2 2 2 2 2 2 2 2 2 2 2 1 1 1 m gh m h m l g m lh I m h I m h m l m lh 运动微分方程: 2 2 2 2 2 2 2 2 2 2 2 1 1 1 m lh I m h I m h m l m lh M 2 2 1 1 2 0 ( ) 0 m gh m h m l g K
知识回顾 MX+KX=P(t) 作用力方程 结论:刚度矩阵K中的元素k的物理意义:是使系统仅在第 j个坐标上产生单位位移而相应于第i个坐标上所需 施加的力 结论:质量阵M中的元素m防 是系统为仅在第个坐标上产生 单位加速度而在第个坐标上所需施加的外力。 29
29 M X K X P(t) 作用力方程 结论:刚度矩阵K中的元素kij的物理意义:是使系统仅在第 j 个坐标上产生单位位移而相应于第 i 个坐标上所需 施加的力 。 结论:质量阵M 中的元素mij 是系统为仅在第j 个坐标上产生 单位加速度而在第i个坐标上所需施加的外力。 知识回顾
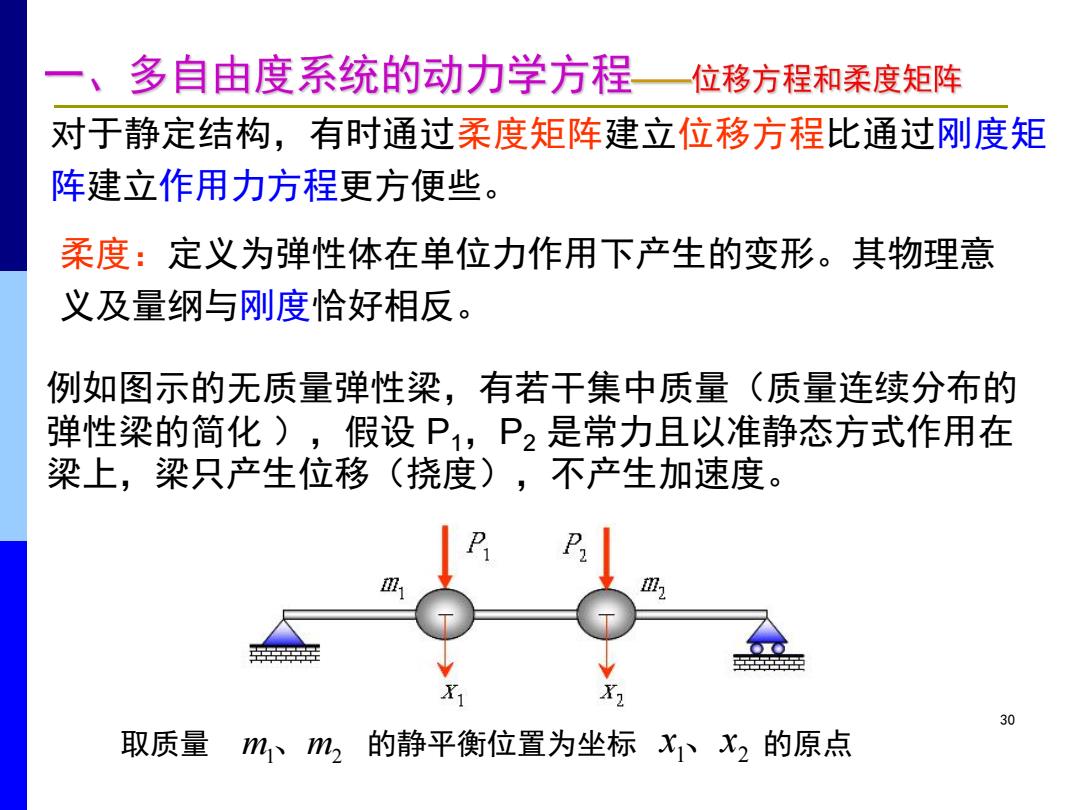
一、多自由度系统的动力学方程 位移方程和柔度矩阵 对于静定结构,有时通过柔度矩阵建立位移方程比通过刚度矩 阵建立作用力方程更方便些 柔度:定义为弹性体在单位力作用下产生的变形。其物理意 义及量纲与刚度恰好相反。 例如图示的无质量弹性梁,有若干集中质量(质量连续分布的 弹性梁的简化),假设P1,P2是常力且以准静态方式作用在 梁上,梁只产生位移(挠度),不产生加速度。 迎1 岳 ●● 30 取质量 mm2的静平衡位置为坐标XX2的原点
30 对于静定结构,有时通过柔度矩阵建立位移方程比通过刚度矩 阵建立作用力方程更方便些。 柔度:定义为弹性体在单位力作用下产生的变形。其物理意 义及量纲与刚度恰好相反。 m1、m2 1 2 取质量 的静平衡位置为坐标 x、x 的原点 例如图示的无质量弹性梁,有若干集中质量(质量连续分布的 弹性梁的简化 ),假设 P1,P2 是常力且以准静态方式作用在 梁上,梁只产生位移(挠度),不产生加速度