南京航空航天大学博士学位论文 LH 左侧后脚 E2 脱附区域的长度 LR 翻滚冲量矩 Ls 步距 Lo 倾覆冲量矩 P 置信度 PRF 运动反力模式 RF 右侧前脚 RH 右侧后脚 Tupc 初始接触阶段 Tspc 稳定作用阶段 TspC 脱离阶段 固定载荷法校准传感器时 Ux,Uy,Uz 各个方向的电压变化 (X,Y) 标记点在i时刻的坐标 万方数据
南京航空航天大学博士学位论文 xv LH 左侧后脚 ε2 脱附区域的长度 LR 翻滚冲量矩 LS 步距 LO 倾覆冲量矩 P 置信度 PRF 运动反力模式 RF 右侧前脚 RH 右侧后脚 TIPC 初始接触阶段 TSPC 稳定作用阶段 TSPC 脱离阶段 UX, UY, UZ 固定载荷法校准传感器时 各个方向的电压变化 (Xi ,Yi) 标记点在 i 时刻的坐标 万方数据

万方数据
万方数据
南京航空航天大学博士学位论文 第一章绪论 1.1研究背景及意义 从悬停于百花丛中的蜂鸟到翱翔于浩瀚苍穹的雄鹰,从奔驰于非洲草原的猎豹到漫步于 悬崖峭壁的壁虎,从游弋于茫茫大海的鲸鱼到穿梭于波澜海面的飞鱼,自然界的动物们不但 丰富了自然本身,使其生机勃勃:同时也为人类展示了大自然的睿智一那些令人叹为观止 的卓越运动行为设计!运动是动物捕食、逃逸、生殖、繁衍等生存行为的基础,因而在亿万 年的生存斗争中,动物们不断地突破其已有的运动能力极限以适应不断恶化的生存环境。这 种运动能力极限的不断突破一次又一次地向人类展示了大自然的智慧,为人们理解和学习自 然提供了途径。 在人类感叹大自然的神奇的同时,更期望能够理解并运用动物运动的智慧,通过仿生的 手段,制造出具有多种用途的仿生机器人,例如能够在壁面、天花板无障碍爬行的仿壁虎机 器人,能够在水中悠然游动的仿生机器鱼以及能够在高空优雅翱翔的仿鸟扑翼机等。而实现 这一目标的关键技术在于如何正确地理解并获得动物运动的智慧,这直接关系到后期仿生机 器人的性能,因为仿生远不止于对外形的重现,更重要的是对生物功能的再现! B 行走:例立摆 奔跑:弹簧质量模型 膀轨迹 一沐 《 一上扑 图1.1在时间和空间上由移动中的动物施加的力的变化川 1 万方数据
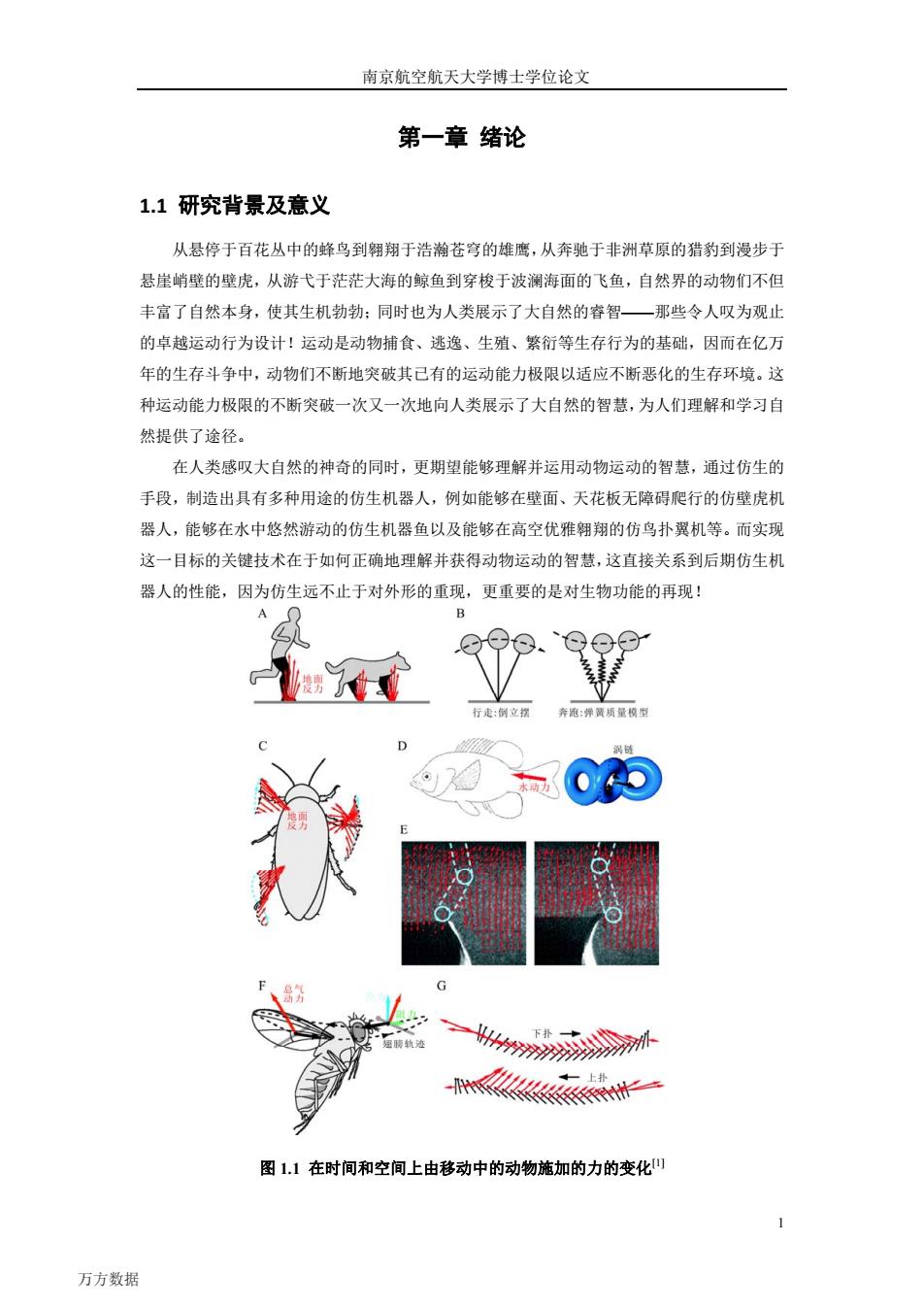
南京航空航天大学博士学位论文 1 第一章 绪论 1.1 研究背景及意义 从悬停于百花丛中的蜂鸟到翱翔于浩瀚苍穹的雄鹰,从奔驰于非洲草原的猎豹到漫步于 悬崖峭壁的壁虎,从游弋于茫茫大海的鲸鱼到穿梭于波澜海面的飞鱼,自然界的动物们不但 丰富了自然本身,使其生机勃勃;同时也为人类展示了大自然的睿智——那些令人叹为观止 的卓越运动行为设计!运动是动物捕食、逃逸、生殖、繁衍等生存行为的基础,因而在亿万 年的生存斗争中,动物们不断地突破其已有的运动能力极限以适应不断恶化的生存环境。这 种运动能力极限的不断突破一次又一次地向人类展示了大自然的智慧,为人们理解和学习自 然提供了途径。 在人类感叹大自然的神奇的同时,更期望能够理解并运用动物运动的智慧,通过仿生的 手段,制造出具有多种用途的仿生机器人,例如能够在壁面、天花板无障碍爬行的仿壁虎机 器人,能够在水中悠然游动的仿生机器鱼以及能够在高空优雅翱翔的仿鸟扑翼机等。而实现 这一目标的关键技术在于如何正确地理解并获得动物运动的智慧,这直接关系到后期仿生机 器人的性能,因为仿生远不止于对外形的重现,更重要的是对生物功能的再现! 图 1.1 在时间和空间上由移动中的动物施加的力的变化[1] 万方数据
大壁虎斜面运动力学、脚趾外翻脱附力学及其仿生研究 (注:(A)跑动的人和慢跑的狗在支撑相阶段受到的地面反力矢量等时间隔变化过程(红线 所示):(B)有腿运动的两个基本力学模型:慢走的动物,其质心由刚性腿拱起,类似于一个 倒立摆,身体的动能和重力势能周期性相互转化:跑动的动物,其腿则类似于一个弹簧,在 减速阶段动能和重力势能储存为弹性能,在推进阶段恢复:(C)奔跑的蟑螂,后腿的地面反 力向前推进动物,但是每只前腿的地面反力方向与动物的运动方向相反。中腿的地面反力先 向后推,然后在支撑相结束时向前推:(①)鱼在游动时身后的涡流:用流动漩涡感应法可以 间接获得时均流体动力:(E)用数字粒子图像速度测量法得到的太阳鱼尾流数据俯视图:尾 鳍的每次摆动形成一对反向旋转的漩涡(蓝线所示),引发一个向外和向后的流动,红色箭头 表示水速:()果蝇翅膀的空气动力学;果蝇悬停时翅膀以大迎角前后拍打:总的空气动力(红 色)可以分解成升力(蓝色)和前进力(绿色)分量:(G)在整个翅膀拍打过程中产生的总的空气动 力矢量(红色)的大小和方向:黑线表示拍打时等时间间隔点处翅膀的瞬时位置) 不论是在天空,陆地,还是在海洋,动物的运动变化源自于力的作用。动物向外界环境 施加力的作用,外界环境同时对动物的运动系统产生了一个相反方向的作用力(牛顿第三定 律),进而改变动物在该方向的运动状态。动物卓越的运动能力源于其对作用力的精细感知 与运动姿态的实时调控(图1.1)。不同的环境对于动物的运动能力提出了不同的要求,动物 必须相应地调整其运动行为和运动反力以适应它们生存的环境。此外,动物通过快速的神经 一运动响应系统来实现捕食或摆脱被捕食,从而确保其生存。动物的运动是运动环境与内在 属性相结合所决定的2,引,所以外在的运动行为及运动力学结果可以直接反映整个响应系统 的内在(物理)性能(神经肌肉的电动力学,肌肉骨骼元件的机械动力学等)以及其与环境的相 互作用机制,46。因此,研究动物的运动系统和环境之间的相互作用力(接触力、运动反力) 及其运动行为的不仅能够有效地揭示动物运动奥秘,还有助于改善仿生机器人的性能。 图1.2仿生机器BigD0g 例如,人们通过对不同地行有腿动物的运动行为及运动力学的研究,建立了慢速下的倒 立摆模型以及奔跑下的弹簧质量模型,有效地模拟了多种有腿动物水平面运动时的质心动力 学图1.1AB)10,并依据这些原理研制出了具有优异性能的四足直立仿生机器人一Bg 万方数据
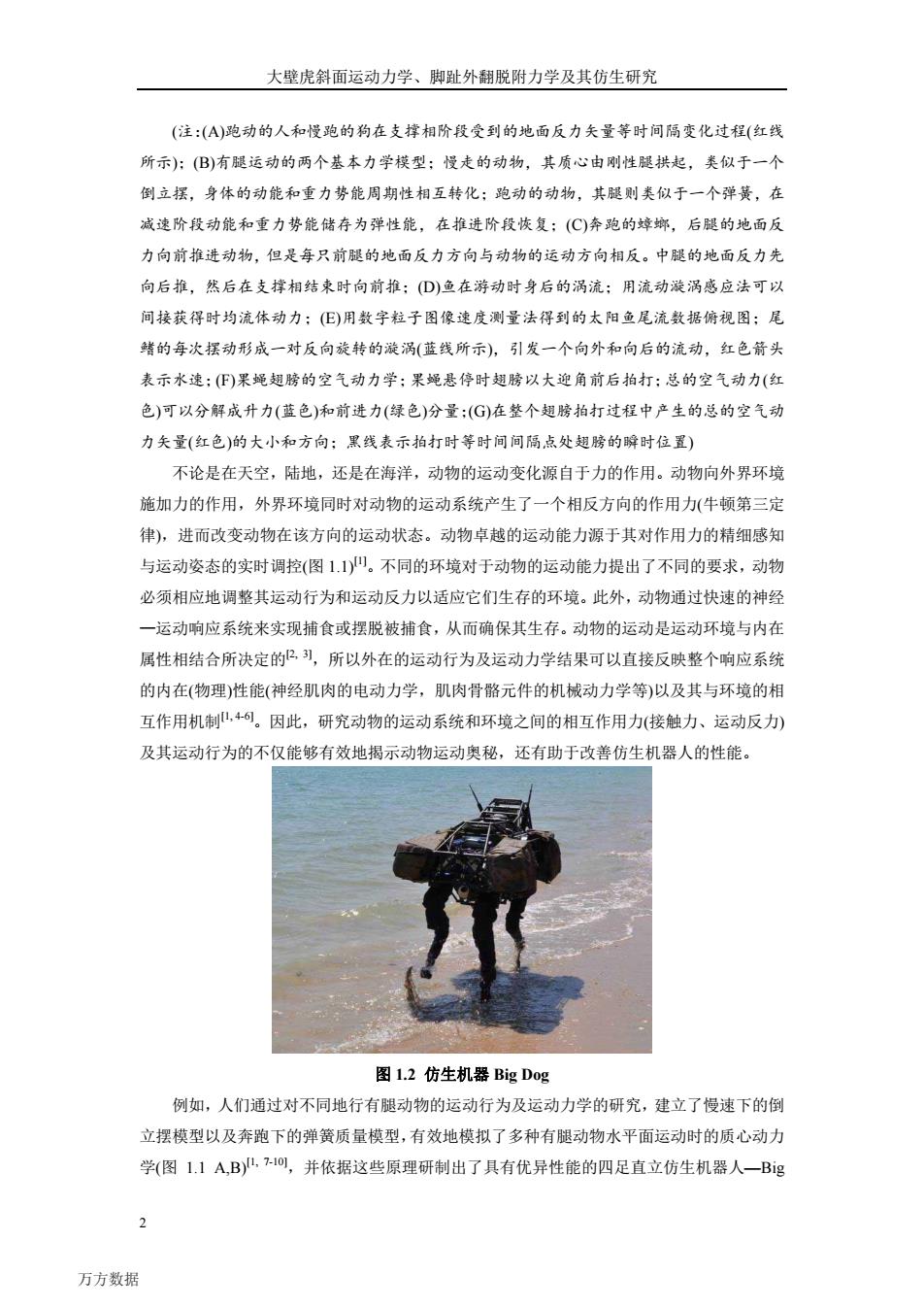
大壁虎斜面运动力学、脚趾外翻脱附力学及其仿生研究 2 (注:(A)跑动的人和慢跑的狗在支撑相阶段受到的地面反力矢量等时间隔变化过程(红线 所示);(B)有腿运动的两个基本力学模型;慢走的动物,其质心由刚性腿拱起,类似于一个 倒立摆,身体的动能和重力势能周期性相互转化;跑动的动物,其腿则类似于一个弹簧,在 减速阶段动能和重力势能储存为弹性能,在推进阶段恢复;(C)奔跑的蟑螂,后腿的地面反 力向前推进动物,但是每只前腿的地面反力方向与动物的运动方向相反。中腿的地面反力先 向后推,然后在支撑相结束时向前推;(D)鱼在游动时身后的涡流;用流动漩涡感应法可以 间接获得时均流体动力;(E)用数字粒子图像速度测量法得到的太阳鱼尾流数据俯视图;尾 鳍的每次摆动形成一对反向旋转的漩涡(蓝线所示),引发一个向外和向后的流动,红色箭头 表示水速;(F)果蝇翅膀的空气动力学;果蝇悬停时翅膀以大迎角前后拍打;总的空气动力(红 色)可以分解成升力(蓝色)和前进力(绿色)分量;(G)在整个翅膀拍打过程中产生的总的空气动 力矢量(红色)的大小和方向;黑线表示拍打时等时间间隔点处翅膀的瞬时位置) 不论是在天空,陆地,还是在海洋,动物的运动变化源自于力的作用。动物向外界环境 施加力的作用,外界环境同时对动物的运动系统产生了一个相反方向的作用力(牛顿第三定 律),进而改变动物在该方向的运动状态。动物卓越的运动能力源于其对作用力的精细感知 与运动姿态的实时调控(图 1.1)[1]。不同的环境对于动物的运动能力提出了不同的要求,动物 必须相应地调整其运动行为和运动反力以适应它们生存的环境。此外,动物通过快速的神经 —运动响应系统来实现捕食或摆脱被捕食,从而确保其生存。动物的运动是运动环境与内在 属性相结合所决定的[2, 3],所以外在的运动行为及运动力学结果可以直接反映整个响应系统 的内在(物理)性能(神经肌肉的电动力学,肌肉骨骼元件的机械动力学等)以及其与环境的相 互作用机制[1, 4-6]。因此,研究动物的运动系统和环境之间的相互作用力(接触力、运动反力) 及其运动行为的不仅能够有效地揭示动物运动奥秘,还有助于改善仿生机器人的性能。 图 1.2 仿生机器 Big Dog 例如,人们通过对不同地行有腿动物的运动行为及运动力学的研究,建立了慢速下的倒 立摆模型以及奔跑下的弹簧质量模型,有效地模拟了多种有腿动物水平面运动时的质心动力 学(图 1.1 A,B)[1, 7-10],并依据这些原理研制出了具有优异性能的四足直立仿生机器人—Big 万方数据
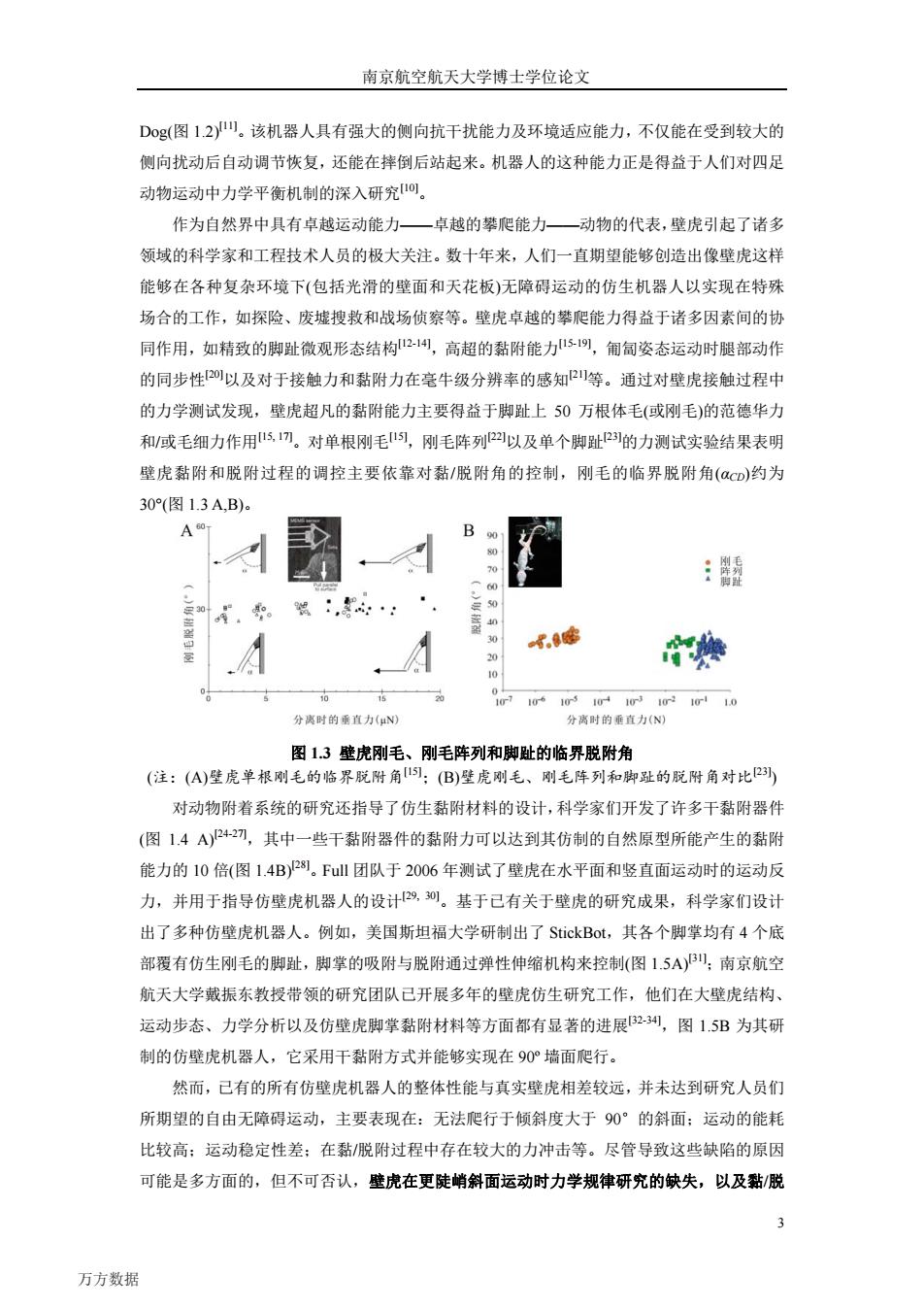
南京航空航天大学博士学位论文 Dog(图1.2)。该机器人具有强大的侧向抗干扰能力及环境适应能力,不仅能在受到较大的 侧向扰动后自动调节恢复,还能在摔倒后站起来。机器人的这种能力正是得益于人们对四足 动物运动中力学平衡机制的深入研究。 作为自然界中具有卓越运动能力一卓越的攀爬能力一动物的代表,壁虎引起了诸多 领域的科学家和工程技术人员的极大关注。数十年来,人们一直期望能够创造出像壁虎这样 能够在各种复杂环境下(包括光滑的壁面和天花板)无障碍运动的仿生机器人以实现在特殊 场合的工作,如探险、废墟搜救和战场侦察等。壁虎卓越的攀爬能力得益于诸多因素间的协 同作用,如精致的脚趾微观形态结构2-1,高超的黏附能力5-1),匍匐姿态运动时腿部动作 的同步性20以及对于接触力和黏附力在毫牛级分辨率的感知2川等。通过对壁虎接触过程中 的力学测试发现,壁虎超凡的黏附能力主要得益于脚趾上50万根体毛(或刚毛)的范德华力 和/或毛细力作用5,1刀。对单根刚毛),刚毛阵列以及单个脚趾2的力测试实验结果表明 壁虎黏附和脱附过程的调控主要依靠对黏/脱附角的控制,刚毛的临界脱附角(a©D)约为 30(图1.3A,B)。 A60 60 30 。 50 40 30 时味 20 10 15 106 10r31010r310r2 11.0 分离时的垂直力(uN) 分离时的垂直力(N) 图13壁虎刚毛、刚毛阵列和脚趾的临界脱附角 (注:(A)壁虎单根刚毛的临界脱附角:(B)壁虎刚毛、刚毛阵列和脚趾的脱附角对比 对动物附着系统的研究还指导了仿生黏附材料的设计,科学家们开发了许多干黏附器件 (图1.4A)242可,其中一些干黏附器件的黏附力可以达到其仿制的自然原型所能产生的黏附 能力的10倍(图1.4B)28。Ful团队于2006年测试了壁虎在水平面和竖直面运动时的运动反 力,并用于指导仿壁虎机器人的设计9,0。基于已有关于壁虎的研究成果,科学家们设计 出了多种仿壁虎机器人。例如,美国斯坦福大学研制出了StickBot,其各个脚掌均有4个底 部覆有仿生刚毛的脚趾,脚掌的吸附与脱附通过弹性伸缩机构来控制(图1.5A)B;南京航空 航天大学戴振东教授带领的研究团队已开展多年的壁虎仿生研究工作,他们在大壁虎结构、 运动步态、力学分析以及仿壁虎脚掌黏附材料等方面都有显著的进展B23刘,图1.5B为其研 制的仿壁虎机器人,它采用干黏附方式并能够实现在90°墙面爬行。 然而,已有的所有仿壁虎机器人的整体性能与真实壁虎相差较远,并未达到研究人员们 所期望的自由无障碍运动,主要表现在:无法爬行于倾斜度大于90°的斜面:运动的能耗 比较高:运动稳定性差:在黏/脱附过程中存在较大的力冲击等。尽管导致这些缺陷的原因 可能是多方面的,但不可否认,壁虎在更陡峭斜面运动时力学规律研究的缺失,以及黏/脱 3 万方数据
南京航空航天大学博士学位论文 3 Dog(图 1.2)[11]。该机器人具有强大的侧向抗干扰能力及环境适应能力,不仅能在受到较大的 侧向扰动后自动调节恢复,还能在摔倒后站起来。机器人的这种能力正是得益于人们对四足 动物运动中力学平衡机制的深入研究[10]。 作为自然界中具有卓越运动能力——卓越的攀爬能力——动物的代表,壁虎引起了诸多 领域的科学家和工程技术人员的极大关注。数十年来,人们一直期望能够创造出像壁虎这样 能够在各种复杂环境下(包括光滑的壁面和天花板)无障碍运动的仿生机器人以实现在特殊 场合的工作,如探险、废墟搜救和战场侦察等。壁虎卓越的攀爬能力得益于诸多因素间的协 同作用,如精致的脚趾微观形态结构[12-14],高超的黏附能力[15-19],匍匐姿态运动时腿部动作 的同步性[20]以及对于接触力和黏附力在毫牛级分辨率的感知[21]等。通过对壁虎接触过程中 的力学测试发现,壁虎超凡的黏附能力主要得益于脚趾上 50 万根体毛(或刚毛)的范德华力 和/或毛细力作用[15, 17]。对单根刚毛[15],刚毛阵列[22]以及单个脚趾[23]的力测试实验结果表明 壁虎黏附和脱附过程的调控主要依靠对黏/脱附角的控制,刚毛的临界脱附角(αCD)约为 30°(图 1.3 A,B)。 图 1.3 壁虎刚毛、刚毛阵列和脚趾的临界脱附角 (注:(A)壁虎单根刚毛的临界脱附角[15];(B)壁虎刚毛、刚毛阵列和脚趾的脱附角对比[23]) 对动物附着系统的研究还指导了仿生黏附材料的设计,科学家们开发了许多干黏附器件 (图 1.4 A)[24-27],其中一些干黏附器件的黏附力可以达到其仿制的自然原型所能产生的黏附 能力的 10 倍(图 1.4B)[28]。Full 团队于 2006 年测试了壁虎在水平面和竖直面运动时的运动反 力,并用于指导仿壁虎机器人的设计[29, 30]。基于已有关于壁虎的研究成果,科学家们设计 出了多种仿壁虎机器人。例如,美国斯坦福大学研制出了 StickBot,其各个脚掌均有 4 个底 部覆有仿生刚毛的脚趾,脚掌的吸附与脱附通过弹性伸缩机构来控制(图 1.5A)[31];南京航空 航天大学戴振东教授带领的研究团队已开展多年的壁虎仿生研究工作,他们在大壁虎结构、 运动步态、力学分析以及仿壁虎脚掌黏附材料等方面都有显著的进展[32-34],图 1.5B 为其研 制的仿壁虎机器人,它采用干黏附方式并能够实现在 90º 墙面爬行。 然而,已有的所有仿壁虎机器人的整体性能与真实壁虎相差较远,并未达到研究人员们 所期望的自由无障碍运动,主要表现在:无法爬行于倾斜度大于 90°的斜面;运动的能耗 比较高;运动稳定性差;在黏/脱附过程中存在较大的力冲击等。尽管导致这些缺陷的原因 可能是多方面的,但不可否认,壁虎在更陡峭斜面运动时力学规律研究的缺失,以及黏/脱 万方数据