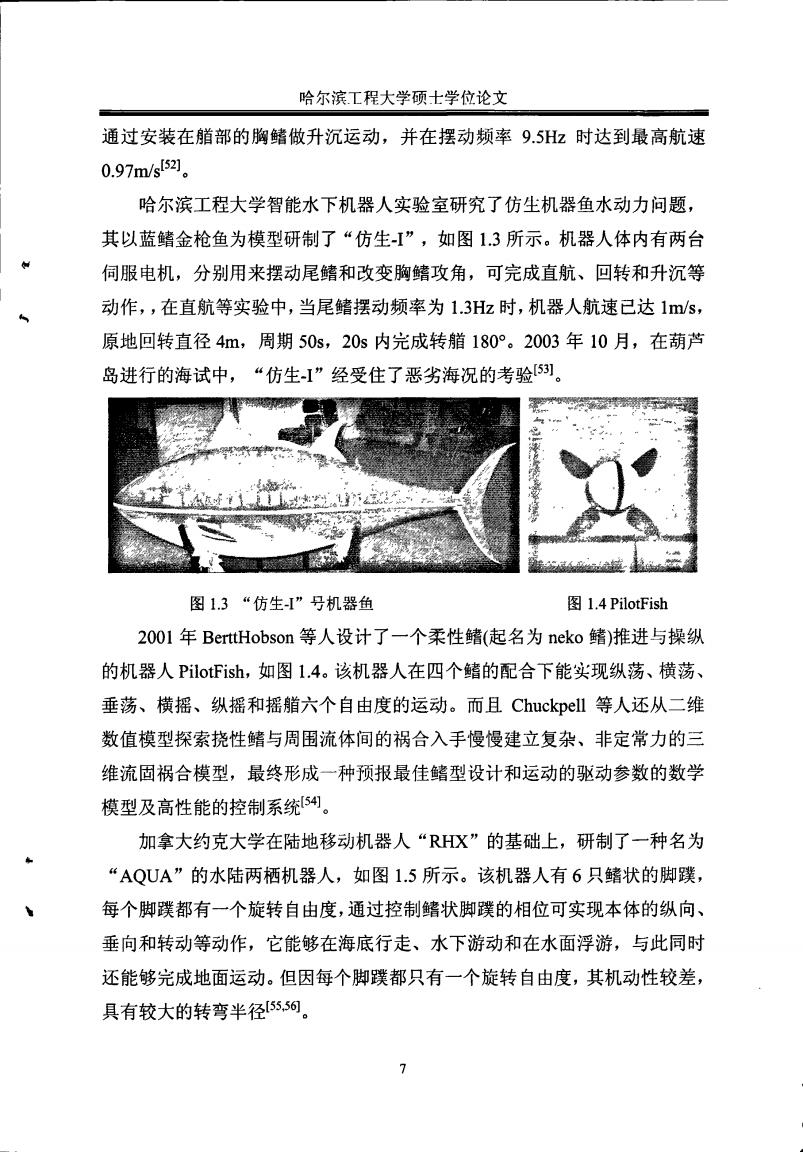
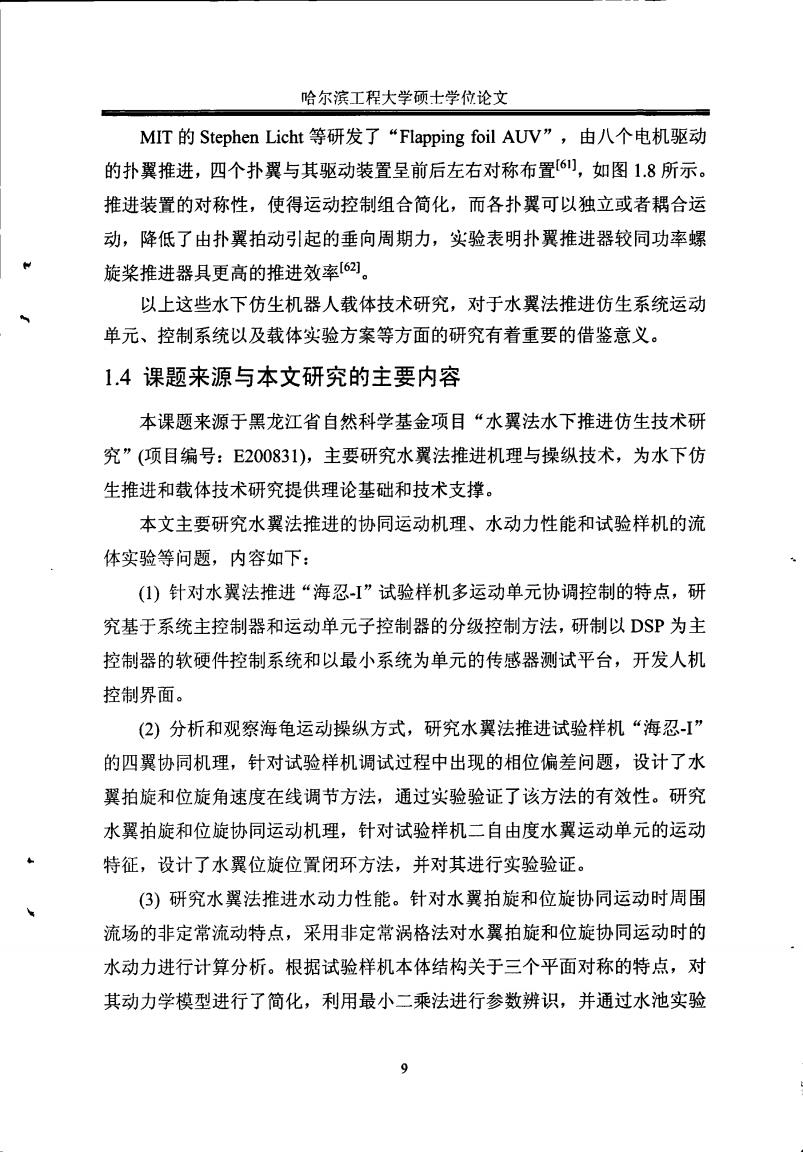
哈尔滨工程大学硕士学位论文 通过安装在艏部的胸鳍做升沉运动,并在摆动频率9.5Hz时达到最高航速 0.97m/s2。 哈尔滨工程大学智能水下机器人实验室研究了仿生机器鱼水动力问题, 其以蓝鳍金枪鱼为模型研制了“仿生I”,如图1.3所示。机器人体内有两台 伺服电机,分别用来摆动尾鳍和改变胸鳍攻角,可完成直航、回转和升沉等 动作,在直航等实验中,当尾鳍摆动频率为1.3Hz时,机器人航速已达1m/s, 原地回转直径4m,周期50s,20s内完成转艏180°。2003年10月,在葫芦 岛进行的海试中,“仿生I”经受住了恶劣海况的考验5) 图1.3“仿生I”号机器鱼 图1.4 PilotFish 2001年BerttHobson等人设计了一个柔性鳍(起名为neko鳍)推进与操纵 的机器人PilotFish,如图1.4。该机器人在四个鳍的配合下能实现纵荡、横荡、 垂荡、横摇、纵摇和摇艏六个自由度的运动。而且Chuckpell等人还从二维 数值模型探索挠性鳍与周围流体间的祸合入手慢慢建立复杂、非定常力的三 维流固祸合模型,最终形成一种预报最佳鳍型设计和运动的驱动参数的数学 模型及高性能的控制系统54。 加拿大约克大学在陆地移动机器人“RHX”的基础上,研制了一种名为 “AQUA”的水陆两栖机器人,如图1.5所示。该机器人有6只鳍状的脚蹼, 每个脚蹼都有一个旋转自由度,通过控制鳍状脚蹼的相位可实现本体的纵向、 垂向和转动等动作,它能够在海底行走、水下游动和在水面浮游,与此同时 还能够完成地面运动。但因每个脚蹼都只有一个旋转自由度,其机动性较差, 具有较大的转弯半径55,5
哈尔滨工程大学硕士学位论文 通过安装在艏部的胸鳍做升沉运动,并在摆动频率9.5Hz时达到最高航速 0.97m/s[521。 哈尔滨工程大学智能水下机器人实验室研究了仿生机器鱼水动力问题, 其以蓝鳍金枪鱼为模型研制了“仿生.I”,如图1.3所示。机器人体内有两台 伺服电机,分别用来摆动尾鳍和改变胸鳍攻角,可完成直航、回转和升沉等 动作,,在直航等实验中,当尾鳍摆动频率为1.3Hz时,机器人航速己达lm/s, 原地回转直径4m,周期50s,20s内完成转艏1800。2003年10月,在葫芦 岛进行的海试中, “仿生.I”经受住了恶劣海况的考验[53】。 图1.3“仿生-I”号机器鱼 图1.4 PilotFish 2001年BerttHobson等人设计了一个柔性鳍(起名为neko鳍)推进与操纵 的机器人PilotFish,如图1.4。该机器人在四个鳍的配合下能实现纵荡、横荡、 垂荡、横摇、纵摇和摇艏六个自由度的运动。而且Chuckpell等人还从二维 数值模型探索挠性鳍与周围流体间的祸合入手慢慢建立复杂、非定常力的三 维流固祸合模型,最终形成一种预报最佳鳍型设计和运动的驱动参数的数学 模型及高性能的控制系统[541。 加拿大约克大学在陆地移动机器人“RHX”的基础上,研制了一种名为 “AQUA”的水陆两栖机器人,如图1.5所示。该机器人有6只鳍状的脚蹼, 每个脚蹼都有一个旋转自由度,通过控制鳍状脚蹼的相位可实现本体的纵向、 垂向和转动等动作,它能够在海底行走、水下游动和在水面浮游,与此同时 还能够完成地面运动。但因每个脚蹼都只有一个旋转自由度,其机动性较差, 具有较大的转弯半径【55,56]

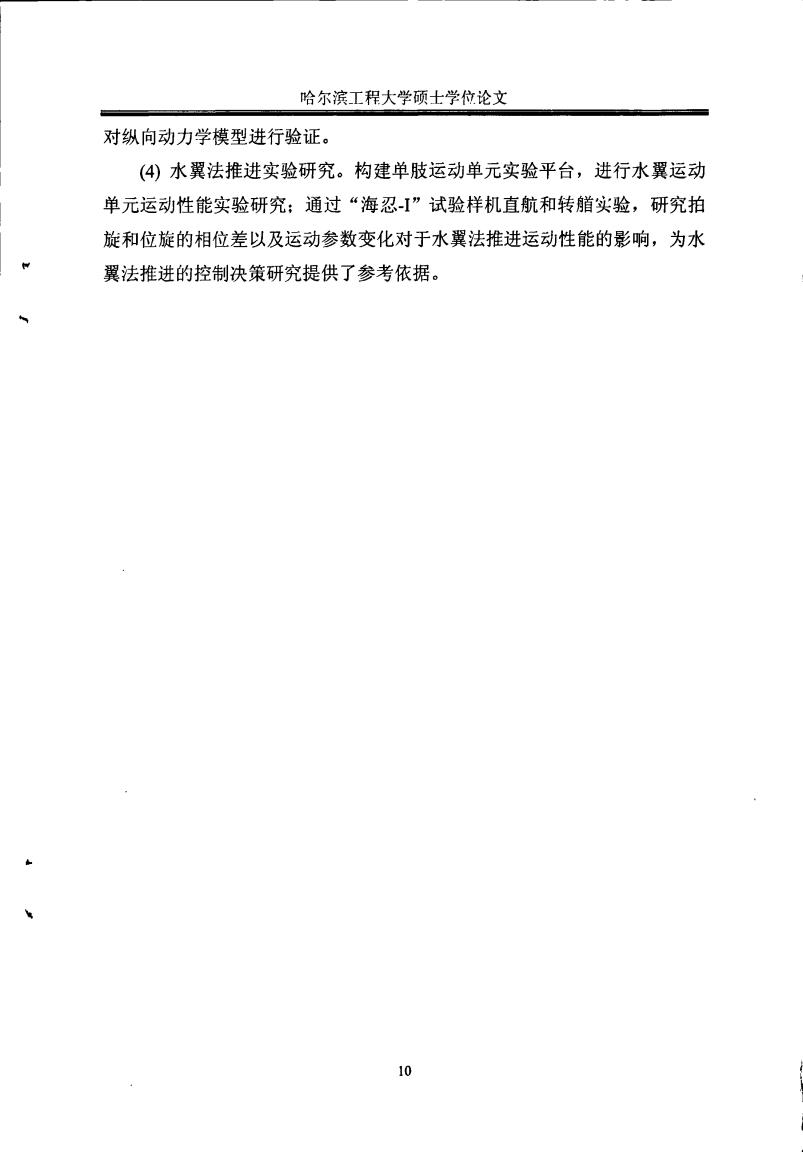
哈尔滨工程大学硕十学位论文 图1.5AQUA 图1.6 Madeleine 加拿大Vassar大学2004年成功研制了新型仿生水下移动平台-机器海龟 “Madeleine”,如图1.6所示。与传统的水下移动平台不同的是:它通过4 个能够俯仰振动的鳍板实现自我推进的。“Madeleine”不仅在模型机构设计 方面与脊椎动物相似,其在巡航和加速时拥有与在脊椎动物有氧肌肉中测得 的相似的功率密度(5wkg和10wkg)也使它能够像动物一样敏捷运动57,81。 2002年8月,杜克大学在美国圣迭戈举行的第5届国际水下机器人大赛 上的AUV参赛作品“Gamera”,如图1.7所示5。与其他参赛机器人所不 同的是,“Gamera”并非采用传统的螺旋桨推进方式,而是利用四个对称鳍 的上下拍动完成机器人的各种运动功能。虽然它还不是典型的水翼法游动, 但四肢鳍的上下拍水动作己经类似海龟前后肢的简单拍动了,是仿水翼法推 进技术的初步探索。特别地,Gamera有一套传感器设备,包括:多普勒计程 仪,用来跟踪该自动水下机器人的运动和位置:一个声学传感器,用来识别 信标位置60。 图1.7 Gamera Robot 图l.&Flapping foil AUV
哈尔滨丁程大学硕十学位论文 图1.5AQUA 图1.6 Madeleine 加拿大Vassar大学2004年成功研制了新型仿生水下移动平台.机器海龟 “Madeleine",如图1.6所示。与传统的水下移动平台不同的是:它通过4 个能够俯仰振动的鳍板实现自我推进的。“Madeleine”不仅在模型机构设计 方面与脊椎动物相似,其在巡航和加速时拥有与在脊椎动物有氧肌肉中测得 的相似的功率密度(5w/kg和10w/kg)也使它能够像动物一样敏捷运动【57’581。 2002年8月,杜克大学在美国圣迭戈举行的第5届国际水下机器人大赛 上的AUV参赛作品“Gamera”,如图1.7所示【591。与其他参赛机器人所不 同的是,“Gamera”并非采用传统的螺旋桨推进方式,而是利用四个对称鳍 的上下拍动完成机器人的各种运动功能。虽然它还不是典型的水翼法游动, 但四肢鳍的上下拍水动作已经类似海龟前后肢的简单拍动了,是仿水翼法推 进技术的初步探索。特别地,Gamera有一套传感器设备,包括:多普勒计程 仪,用来跟踪该自动水下机器人的运动和位置;一个声学传感器,用来识别 信标位置【6…。 图1.7 Gamera Robot 图1.8 Flapping foil AUV 8
哈尔滨工程大学硕士学位论文 MIT的Stephen Licht等研发了“Flapping foil AUV”,由八个电机驱动 的扑翼推进,四个扑翼与其驱动装置呈前后左右对称布置6刚,如图1.8所示。 推进装置的对称性,使得运动控制组合简化,而各扑翼可以独立或者耦合运 动,降低了由扑翼拍动引起的垂向周期力,实验表明扑翼推进器较同功率螺 旋桨推进器具更高的推进效率[62。 以上这些水下仿生机器人载体技术研究,对于水翼法推进仿生系统运动 单元、控制系统以及载体实验方案等方面的研究有着重要的借鉴意义。 1.4课题来源与本文研究的主要内容 本课题来源于黑龙江省自然科学基金项目“水翼法水下推进仿生技术研 究”(项目编号:E200831),主要研究水翼法推进机理与操纵技术,为水下仿 生推进和载体技术研究提供理论基础和技术支撑。 本文主要研究水翼法推进的协同运动机理、水动力性能和试验样机的流 体实验等问题,内容如下: (I)针对水翼法推进“海忍-I”试验样机多运动单元协调控制的特点,研 究基于系统主控制器和运动单元子控制器的分级控制方法,研制以DSP为主 控制器的软硬件控制系统和以最小系统为单元的传感器测试平台,开发人机 控制界面。 (2)分析和观察海龟运动操纵方式,研究水翼法推进试验样机“海忍-I” 的四翼协同机理,针对试验样机调试过程中出现的相位偏差问题,设计了水 翼拍旋和位旋角速度在线调节方法,通过实验验证了该方法的有效性。研究 水翼拍旋和位旋协同运动机理,针对试验样机二自由度水翼运动单元的运动 特征,设计了水翼位旋位置闭环方法,并对其进行实验验证。 (3)研究水翼法推进水动力性能。针对水翼拍旋和位旋协同运动时周围 流场的非定常流动特点,采用非定常涡格法对水翼拍旋和位旋协同运动时的 水动力进行计算分析。根据试验样机本体结构关于三个平面对称的特点,对 其动力学模型进行了简化,利用最小二乘法进行参数辨识,并通过水池实验
哈尔滨工程大学硕士学位论文 MIT的Stephen Licht等研发了“Flapping foil AUV”,由八个电机驱动 的扑翼推进,四个扑翼与其驱动装置呈前后左右对称布置【6¨,如图1.8所示。 推进装置的对称性,使得运动控制组合简化,而各扑翼可以独立或者耦合运 动,降低了由扑翼拍动引起的垂向周期力,实验表明扑翼推进器较同功率螺 旋桨推进器具更高的推进效率【6引。 以上这些水下仿生机器人载体技术研究,对于水翼法推进仿生系统运动 单元、控制系统以及载体实验方案等方面的研究有着重要的借鉴意义。 1.4课题来源与本文研究的主要内容 本课题来源于黑龙江省自然科学基金项目“水翼法水下推进仿生技术研 究’’(项目编号:E20083 1),主要研究水翼法推进机理与操纵技术,为水下仿 生推进和载体技术研究提供理论基础和技术支撑。 本文主要研究水翼法推进的协同运动机理、水动力性能和试验样机的流 体实验等问题,内容如下: (1)针对水翼法推进“海忍.I"试验样机多运动单元协调控制的特点,研 究基于系统主控制器和运动单元子控制器的分级控制方法,研制以DSP为主 控制器的软硬件控制系统和以最小系统为单元的传感器测试平台,开发人机 控制界面。 (2)分析和观察海龟运动操纵方式,研究水翼法推进试验样机“海忍.I" 的四翼协同机理,针对试验样机调试过程中出现的相位偏差问题,设计了水 翼拍旋和位旋角速度在线调节方法,通过实验验证了该方法的有效性。研究 水翼拍旋和位旋协同运动机理,针对试验样机二自由度水翼运动单元的运动 特征,设计了水翼位旋位置闭环方法,并对其进行实验验证。 (3)研究水翼法推进水动力性能。针对水翼拍旋和位旋协同运动时周围 流场的非定常流动特点,采用非定常涡格法对水翼拍旋和位旋协同运动时的 水动力进行计算分析。根据试验样机本体结构关于三个平面对称的特点,对 其动力学模型进行了简化,利用最d'--乘法进行参数辨识,并通过水池实验 9
哈尔滨工程大学硕士学位论文 对纵向动力学模型进行验证。 (4)水翼法推进实验研究。构建单肢运动单元实验平台,进行水翼运动 单元运动性能实验研究:通过“海忍I”试验样机直航和转艏实验,研究拍 旋和位旋的相位差以及运动参数变化对于水翼法推进运动性能的影响,为水 翼法推进的控制决策研究提供了参考依据。 10
哈尔滨工程大学硕士学位论文 对纵向动力学模型进行验证。 (4)水翼法推进实验研究。构建单肢运动单元实验平台,进行水翼运动 单元运动性能实验研究;通过“海忍.I"试验样机直航和转艏实验,研究拍 旋和位旋的相位差以及运动参数变化对于水翼法推进运动性能的影响,为水 翼法推进的控制决策研究提供了参考依据。 10
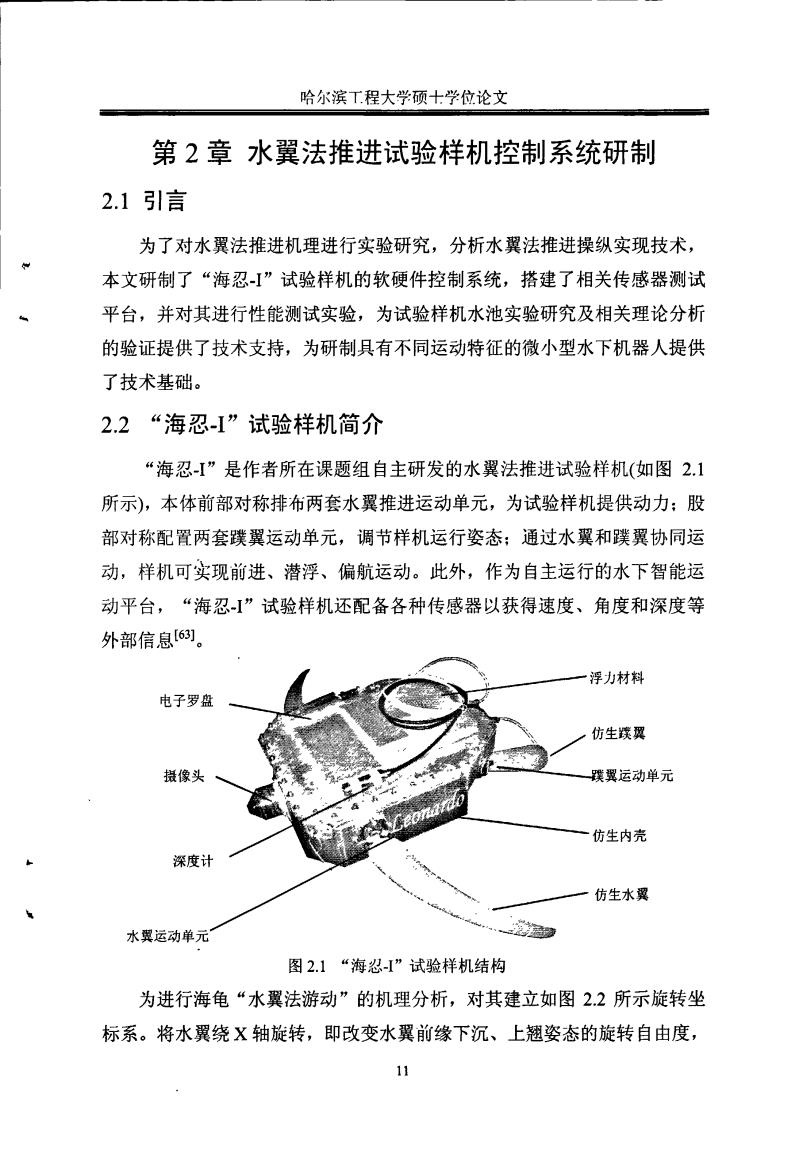
哈尔滨工程大学硕十学位论文 第2章水翼法推进试验样机控制系统研制 2.1引言 为了对水翼法推进机理进行实验研究,分析水翼法推进操纵实现技术, 本文研制了“海忍-”试验样机的软硬件控制系统,搭建了相关传感器测试 平台,并对其进行性能测试实验,为试验样机水池实验研究及相关理论分析 的验证提供了技术支持,为研制具有不同运动特征的微小型水下机器人提供 了技术基础。 2.2“海忍-I”试验样机简介 “海忍-I”是作者所在课题组自主研发的水翼法推进试验样机(如图21 所示),本体前部对称排布两套水翼推进运动单元,为试验样机提供动力:股 部对称配置两套蹼翼运动单元,调节样机运行姿态:通过水翼和蹼翼协同运 动,样机可实现前进、潜浮、偏航运动。此外,作为自主运行的水下智能运 动平台,“海忍-”试验样机还配备各种传感器以获得速度、角度和深度等 外部信息[631。 浮力材料 电子罗盘 仿生埃翼 摄像头 璞翼运动单元 仿生内壳 深度计 仿生水翼 水翼运动单元 图2.1“海忍I”试验样机结构 为进行海龟“水翼法游动”的机理分析,对其建立如图22所示旋转坐 标系。将水翼绕X轴旋转,即改变水翼前缘下沉、上翘姿态的旋转自由度, 11
哈尔滨T程大学硕+学位论文 第2章水翼法推进试验样机控制系统研制 2.1引言 为了对水翼法推进机理进行实验研究,分析水翼法推进操纵实现技术, 本文研制了“海忍.I”试验样机的软硬件控制系统,搭建了相关传感器测试 平台,并对其进行性能测试实验,为试验样机水池实验研究及相关理论分析 的验证提供了技术支持,为研制具有不同运动特征的微小型水下机器人提供 了技术基础。 2.2“海忍.I"试验样机简介 “海忍.I"是作者所在课题组自主研发的水翼法推进试验样机(如图2.1 所示),本体前部对称排布两套水翼推进运动单元,为试验样机提供动力;股 部对称配置两套蹼翼运动单元,调节样机运行姿态;通过水翼和蹼翼协同运 动,样机可实现前进、潜浮、偏航运动。此外,作为自主运行的水下智能运 动平台, “海忍.I"试验样机还配备各种传感器以获得速度、角度和深度等 外部信息【63】。 兀 图2.1“海忍一I”试验样机结构 为进行海龟“水翼法游动”的机理分析,对其建立如图2.2所示旋转坐 标系。将水翼绕X轴旋转,即改变水翼前缘下沉、上翘姿态的旋转自由度