自动控制原理 3、积分控制规律 、m0=K6e0dt G(s)- K 可提高系统型别,有利于准确性的提高; 可产生-90°相角,对稳定性不利。 般不单独使用。 4、比例积分PI控制规律 (主要用于提高稳态性能) m0=0a0w6e=0+ 可提高系统型别,有利于准确性的提高; 零点的加入可削弱对系统稳定性的不利影响
自动控制原理 4、比例积分PI控制规律(主要用于提高稳态性能) 1 ( ) (1 ) p i G s K T s = + 可提高系统型别,有利于准确性的提高; 零点的加入可削弱对系统稳定性的不利影响。 0 ( ) ( ) ( ) t p p i K m t K e t e t dt T = + 3、积分I控制规律 ( ) Ki G s s = 可提高系统型别,有利于准确性的提高; 可产生-90°相角,对稳定性不利。 一般不单独使用。 0 ( ) ( ) t m t K e t dt = i
自动控制原理 5、PID控制规律 m0-ka0+交e0+:的 G(s)=K,(1++x) T.s 给开环带来一个零值极点和两个负实数零点,可同时 提高系统的动静态性能指标。 以开环频率特性的角度来讲: 部分体现在频率特性的低频段,以提高系统的稳态 性能; 而D部分发生在频率特性的中频段,以改善系统的 动态性能
自动控制原理 5、PID控制规律 1 ( ) (1 ) p i G s K s T s = + + 给开环带来一个零值极点和两个负实数零点,可同时 提高系统的动静态性能指标。 以开环频率特性的角度来讲: I部分体现在频率特性的低频段,以提高系统的稳态 性能; 而D部分发生在频率特性的中频段,以改善系统的 动态性能。 0 ( ) ( ) ( ) ( ) t p p p i K de t m t K e t e t dt K T dt = + +

自动控制原理 例6-2设比例-积分控制系统如图6-9所示。其中不可 变部分的传递函数为 G(S)= Ko s(Ts+1) 试分析P控制器对系统稳态性能的改善作用。 E( R(s) M(s) Ko C(s) s(Ts+1)
自动控制原理 + - R(s) ) 1 (1 T s K i p + ( 1) 0 s Ts + K M(s) C(s) E s( ) 例6-2 设比例-积分控制系统如图6-9所示。其中不可 变部分的传递函数为 试分析PI控制器对系统稳态性能的改善作用。 0 0 ( ) ( 1) K G s s Ts = +
自动控制原理 加入P前: 开环传函: K。 Gk(s)= 特征方程:Ts2+5+K。=0 s(Ts+1) 静态误差系数: KD=∞,K,=K0,Ka=0 稳态误差:e=0,ew=1/K,ea=∞ 加入P后: 开环传函:Gx(S)= KKo(Tis+1) 结论:PI校 Ts2(Ts+1) 正可保证稳 特征方程:T,Ts3+Ts2+K,KTs+K,K。=0 定的前提下 静态误差系数:Kp=∞,K,=∞,K。= KKo 提高系统稳 态性能。 T 稳态误差: ep=0,em=0,ea=1/K
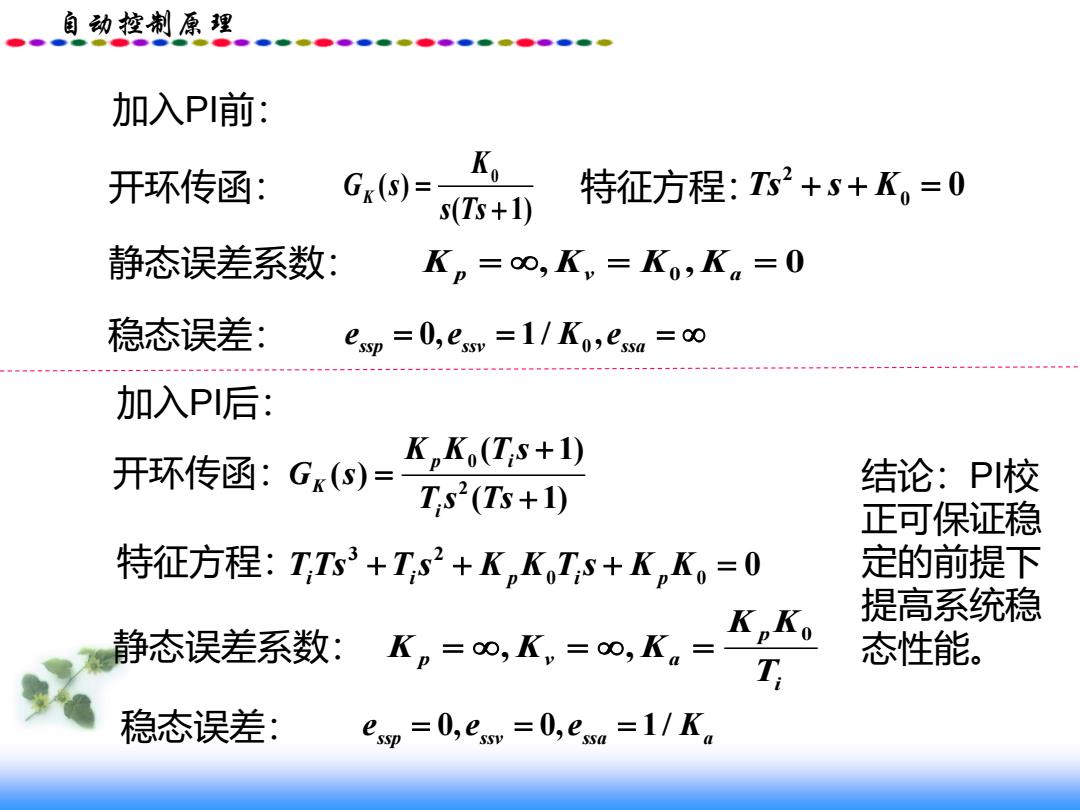
自动控制原理 加入PI前: 0 ( ) ( 1) K K G s s Ts = + 特征方程: 2 0 开环传函: Ts s K + + = 0 加入PI后: 0 2 ( 1) ( ) ( 1) p i K i K K T s G s T s Ts + = + 特征方程: 3 2 0 0 0 TTs T s K K T s K K i i p i p + + + = 开环传函: 0 静态误差系数: K K K K p v a = = = , , 00 , , p p v a i K K K K K T 静态误差系数: = = = 0 0, 1/ , ssp ssv ssa 稳态误差: e e K e = = = 0, 0, 1/ ssp ssv ssa a 稳态误差: e e e K = = = 结论:PI校 正可保证稳 定的前提下 提高系统稳 态性能