哈尔滨工业大学工学硕士学位论文 线,鱼体波波幅包络线具有二次曲线特征,鱼体波可以通过波幅包络线与正 弦曲线的合成得到。建立运动学模型的坐标系,原点取在鱼体波幅为零处, 大致位于鱼体中心体干线和两胸鳍连线的交点处,鱼的游动方向为x轴正方 向,鱼体位于x轴负方向。根据鱼体波为一波幅逐渐增大的行波特征,鱼体 波曲线可通过鱼体波波幅包络线与正弦曲线的合成来进行数学描述 yi(x,1)=(cx+c,x2)sin(kx+@t) (1-1) 式中y。一一鱼体侧向位移(波幅): 1一一为身体波波长: k一一为身体波波数,k=2π/1: 0一一身体波频率,0=2πf=2π/T。 以上参数中,鱼体波波幅包络线系数℃、℃,的数值与鱼游动速度、鱼体 尺寸、游动姿态等因素有关。通过控制c、C,的取值,可达到控制尾鳍摆动 轴的摆幅,调整身体波波幅分布的目的。身体波的波动及尾鳍摆动的频率随 鱼体长度的不同而变化。研究发现,在相同游动速度情况下,体长较大的鱼 比体长较小的鱼身体波动频率小。在一维稳态游动过程中,通常鱼体波波长 入≥1L(L为鱼体长),即身体长度上鱼体波波数k≤1,这意味着在仿鱼水 下推进器的设计中不需要复杂的机构来产生足够的柔韧性以模拟鱼体的多个 身体波,这有利于仿鱼水下推进器的物理实现B]。 国内,童秉纲等对这一理论进行了补充,发展了三维波动板理论,包括 正问题和反问题:分析了几种运动模式的推进性能以及它们之间的过渡和联 系,研究了加速运动的推进性能,发展了二维波动板和平板摆动的非线性理 论,考虑了大摆幅运动和尾涡层演化B6 哈尔滨工程大学彭之春、庞永杰采用两种坐标系:固定坐标系E-5 和动坐标系O-)z,动坐标系的原点设在机器鱼的重心上。由此确立机器 鱼运动的一般方程。他们参考潜艇的运动方程,假如定常运动时,水平 方向合力为零,垂直方向上只考虑升力,得到机器鱼垂直面运动方程。 1.5本课题的研究目标和研究内容 根据机器鱼的国内外研究现状可以发现,现有机器鱼样机的驱动结构多 为刚性结构,其运动姿态与真鱼相比还有较大差距,性能指标远没有达到真 鱼的水平。因此,进一步开展深入的理论和实验研究,探索新型的鱼体结构 具有重要的意义。本文创新的将柔性铰链结构应用到机器鱼的脊骨结构,使
哈尔滨工业大学工学硕士学位论文 - 8 - 线,鱼体波波幅包络线具有二次曲线特征,鱼体波可以通过波幅包络线与正 弦曲线的合成得到。建立运动学模型的坐标系,原点取在鱼体波幅为零处, 大致位于鱼体中心体干线和两胸鳍连线的交点处,鱼的游动方向为 x 轴正方 向,鱼体位于 x 轴负方向。根据鱼体波为一波幅逐渐增大的行波特征,鱼体 波曲线可通过鱼体波波幅包络线与正弦曲线的合成来进行数学描述 (,) b y x t =( 1 c x+ 2 c 2 x )sin(kx+ω t) (1-1) 式中 b y ——鱼体侧向位移(波幅); λ ——为身体波波长; k ——为身体波波数, k = 2 / π λ ; ω ——身体波频率,ω = 2 2/ π π f = T 。 以上参数中,鱼体波波幅包络线系数 1 c 、 2 c 的数值与鱼游动速度、鱼体 尺寸、游动姿态等因素有关。通过控制 1 c 、 2 c 的取值,可达到控制尾鳍摆动 轴的摆幅,调整身体波波幅分布的目的。身体波的波动及尾鳍摆动的频率随 鱼体长度的不同而变化。研究发现,在相同游动速度情况下,体长较大的鱼 比体长较小的鱼身体波动频率小。在一维稳态游动过程中,通常鱼体波波长 LB λ ≥ 1 ( LB 为鱼体长),即身体长度上鱼体波波数 k ≤ 1,这意味着在仿鱼水 下推进器的设计中不需要复杂的机构来产生足够的柔韧性以模拟鱼体的多个 身体波,这有利于仿鱼水下推进器的物理实现[35]。 国内,童秉纲等对这一理论进行了补充,发展了三维波动板理论,包括 正问题和反问题;分析了几种运动模式的推进性能以及它们之间的过渡和联 系,研究了加速运动的推进性能,发展了二维波动板和平板摆动的非线性理 论,考虑了大摆幅运动和尾涡层演化[36]。 哈尔滨工程大学彭之春、庞永杰采用两种坐标系:固定坐标系 E −ξης 和动坐标系 O xyz − ,动坐标系的原点设在机器鱼的重心上。由此确立机器 鱼运动的一般方程[37]。他们参考潜艇的运动方程,假如定常运动时,水平 方向合力为零,垂直方向上只考虑升力,得到机器鱼垂直面运动方程。 1.5 本课题的研究目标和研究内容 根据机器鱼的国内外研究现状可以发现,现有机器鱼样机的驱动结构多 为刚性结构,其运动姿态与真鱼相比还有较大差距,性能指标远没有达到真 鱼的水平。因此,进一步开展深入的理论和实验研究,探索新型的鱼体结构 具有重要的意义。本文创新的将柔性铰链结构应用到机器鱼的脊骨结构,使
哈尔滨工业大学工学硕士学位论文 其在运动过程中能够产生和真鱼游动状态相一致的平滑的变形姿态。并通过 参数优化设计,得到合理的鱼体柔性脊骨结构,达到提高机器鱼游动性能的 目的。 本文拟具体进行以下研究工作: (1)机器鱼运动学模型的建立与仿真 将鲤鱼作为鲹科推进模式鱼类的代表,通过图像处理的手段,提取鱼体 稳态巡游的一维体干线运动轨迹,经过分析研究,建立鲹科推进模式鱼类一 维稳态巡游的运动学模型。并借助Matlab软件对该运动学模型进行仿真分 析,验证运动学模型的正确性和合理性。 (2)机器鱼柔性脊骨的优化设计 以机器鱼一维稳态巡游的运动学模型为理论基础,采用参数优化设计方 法,对鲹科推进模式机器鱼柔性脊骨的三维尺寸进行优化设计。其中,运用 Matlab语言编写优化算法程序。通过优化设计分析,验证柔性脊骨比刚性 脊骨具备更好的复现理论运动曲线的优越性。 (3)机器鱼柔性脊骨的有限元分析 运用ANSYS有限元软件,建立六关节柔性脊骨的有限元模型,对其进 行有限元分析。首先,分析柔性脊骨有限元模型的变形姿态,提出使柔性脊 骨产生和运动学模型相符的变形姿态的加载方式。然后,使柔性脊骨产生 理论变形姿态,分别对其进行在此变形姿态下的静力学和动力学分析,得到 更为合理的脊骨厚度尺寸和柔性脊骨的静力学及动力学特性。 (4)机器鱼柔性脊骨的静力学实验研究 设计加工柔性脊骨实体,对其进行变形姿态和相关力学特性的实验研 究。通过实验结果的对比分析,验证本文运动学模型、优化设计和仿真分析 的正确性和合理性。为后续整个机器鱼的设计打下基础。 .9-
哈尔滨工业大学工学硕士学位论文 - 9 - 其在运动过程中能够产生和真鱼游动状态相一致的平滑的变形姿态。并通过 参数优化设计,得到合理的鱼体柔性脊骨结构,达到提高机器鱼游动性能的 目的。 本文拟具体进行以下研究工作: (1) 机器鱼运动学模型的建立与仿真 将鲤鱼作为鯵科推进模式鱼类的代表,通过图像处理的手段,提取鱼体 稳态巡游的一维体干线运动轨迹,经过分析研究,建立鲹科推进模式鱼类一 维稳态巡游的运动学模型。并借助 Matlab 软件对该运动学模型进行仿真分 析,验证运动学模型的正确性和合理性。 (2) 机器鱼柔性脊骨的优化设计 以机器鱼一维稳态巡游的运动学模型为理论基础,采用参数优化设计方 法,对鲹科推进模式机器鱼柔性脊骨的三维尺寸进行优化设计。其中,运用 Matlab 语言编写优化算法程序。通过优化设计分析,验证柔性脊骨比刚性 脊骨具备更好的复现理论运动曲线的优越性。 (3) 机器鱼柔性脊骨的有限元分析 运用 ANSYS 有限元软件,建立六关节柔性脊骨的有限元模型,对其进 行有限元分析。首先,分析柔性脊骨有限元模型的变形姿态,提出使柔性脊 骨产生和运动学模型相符的变形姿态的加载方式。然后, 使柔性脊骨产生 理论变形姿态,分别对其进行在此变形姿态下的静力学和动力学分析,得到 更为合理的脊骨厚度尺寸和柔性脊骨的静力学及动力学特性。 (4) 机器鱼柔性脊骨的静力学实验研究 设计加工柔性脊骨实体,对其进行变形姿态和相关力学特性的实验研 究。通过实验结果的对比分析,验证本文运动学模型、优化设计和仿真分析 的正确性和合理性。为后续整个机器鱼的设计打下基础
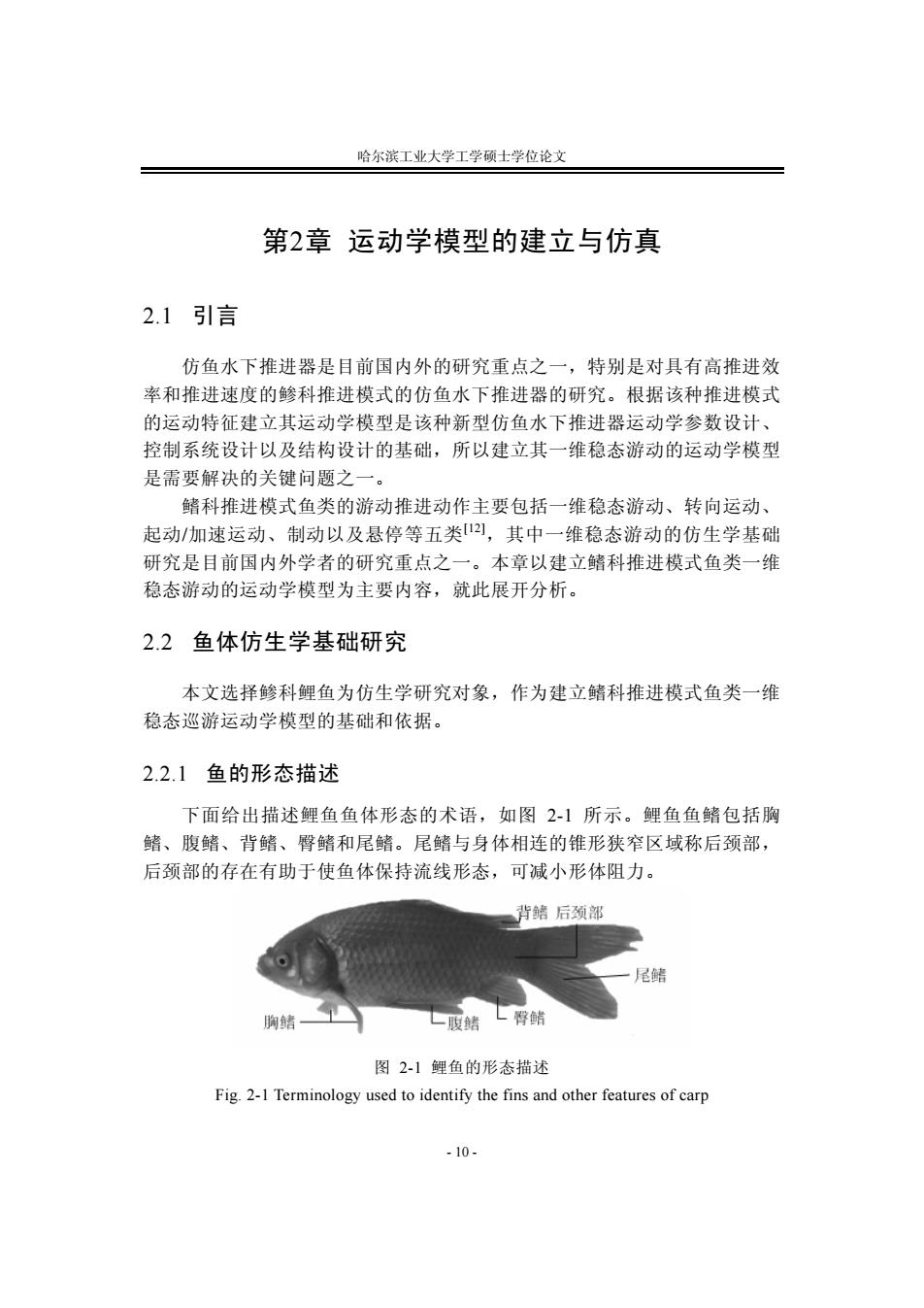
哈尔滨工业大学工学硕士学位论文 第2章运动学模型的建立与仿真 2.1引言 仿鱼水下推进器是目前国内外的研究重点之一,特别是对具有高推进效 率和推进速度的鲹科推进模式的仿鱼水下推进器的研究。根据该种推进模式 的运动特征建立其运动学模型是该种新型仿鱼水下推进器运动学参数设计、 控制系统设计以及结构设计的基础,所以建立其一维稳态游动的运动学模型 是需要解决的关键问题之一。 鳍科推进模式鱼类的游动推进动作主要包括一维稳态游动、转向运动、 起动/加速运动、制动以及悬停等五类],其中一维稳态游动的仿生学基础 研究是目前国内外学者的研究重点之一。本章以建立鳍科推进模式鱼类一维 稳态游动的运动学模型为主要内容,就此展开分析。 2.2鱼体仿生学基础研究 本文选择鲹科鲤鱼为仿生学研究对象,作为建立鳍科推进模式鱼类一维 稳态巡游运动学模型的基础和依据。 2.2.1鱼的形态描述 下面给出描述鲤鱼鱼体形态的术语,如图2-1所示。鲤鱼鱼鳍包括胸 鳍、腹鳍、背鳍、臀鳍和尾鳍。尾鳍与身体相连的锥形狭窄区域称后颈部, 后颈部的存在有助于使鱼体保持流线形态,可减小形体阻力。 背鳍后颈部 尾鳍 胸鳍 一腹鳍 L臀 图2-1鲤鱼的形态描述 Fig.2-1 Terminology used to identify the fins and other features of carp -10-
哈尔滨工业大学工学硕士学位论文 - 10 - 第2章 运动学模型的建立与仿真 2.1 引言 仿鱼水下推进器是目前国内外的研究重点之一,特别是对具有高推进效 率和推进速度的鲹科推进模式的仿鱼水下推进器的研究。根据该种推进模式 的运动特征建立其运动学模型是该种新型仿鱼水下推进器运动学参数设计、 控制系统设计以及结构设计的基础,所以建立其一维稳态游动的运动学模型 是需要解决的关键问题之一。 鳍科推进模式鱼类的游动推进动作主要包括一维稳态游动、转向运动、 起动/加速运动、制动以及悬停等五类[12],其中一维稳态游动的仿生学基础 研究是目前国内外学者的研究重点之一。本章以建立鳍科推进模式鱼类一维 稳态游动的运动学模型为主要内容,就此展开分析。 2.2 鱼体仿生学基础研究 本文选择鲹科鲤鱼为仿生学研究对象,作为建立鳍科推进模式鱼类一维 稳态巡游运动学模型的基础和依据。 2.2.1 鱼的形态描述 下面给出描述鲤鱼鱼体形态的术语,如图 2-1 所示。鲤鱼鱼鳍包括胸 鳍、腹鳍、背鳍、臀鳍和尾鳍。尾鳍与身体相连的锥形狭窄区域称后颈部, 后颈部的存在有助于使鱼体保持流线形态,可减小形体阻力。 图 2-1 鲤鱼的形态描述 Fig. 2-1 Terminology used to identify the fins and other features of carp
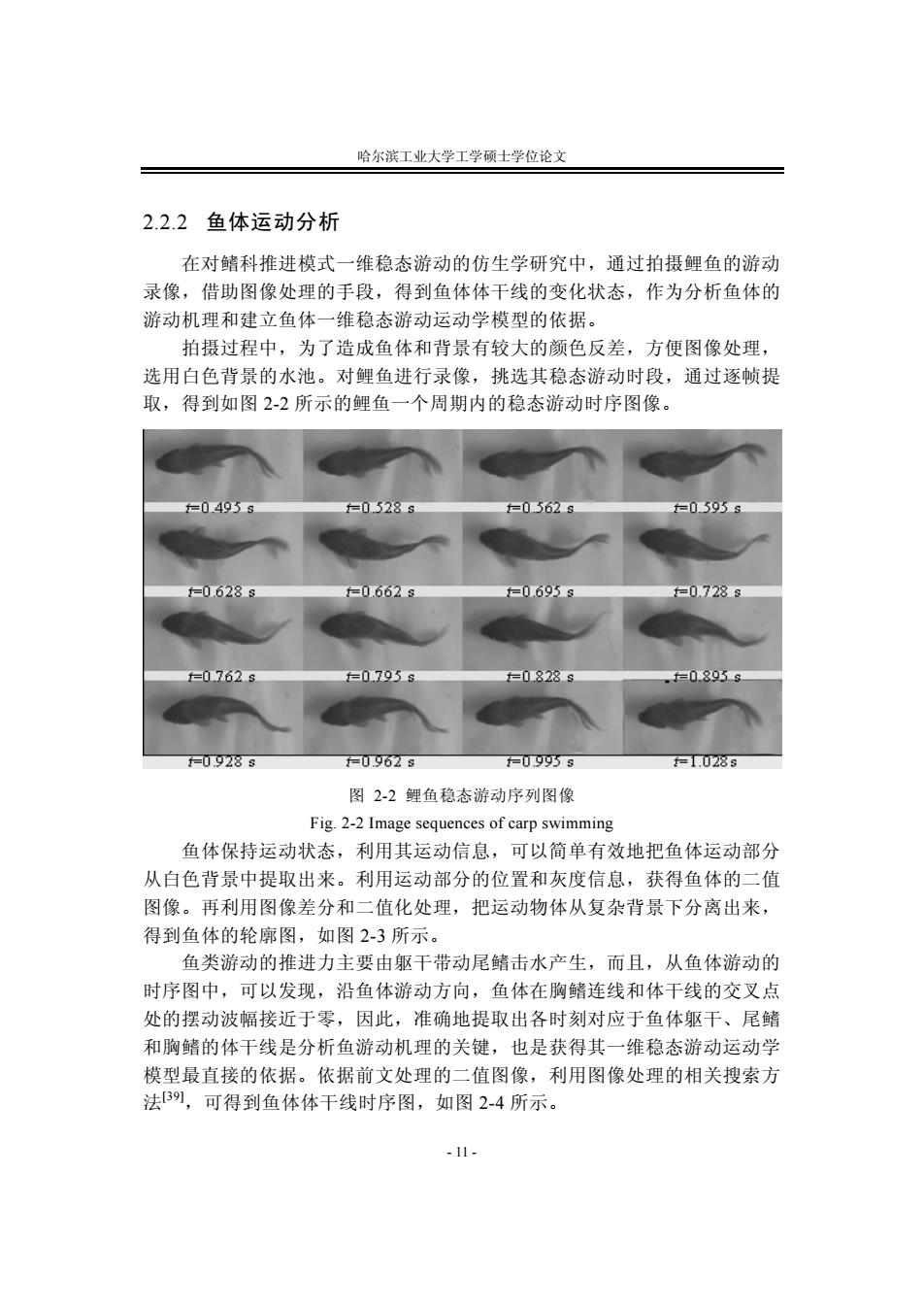
哈尔滨工业大学工学硕士学位论文 2.2.2鱼体运动分析 在对鳍科推进模式一维稳态游动的仿生学研究中,通过拍摄鲤鱼的游动 录像,借助图像处理的手段,得到鱼体体干线的变化状态,作为分析鱼体的 游动机理和建立鱼体一维稳态游动运动学模型的依据。 拍摄过程中,为了造成鱼体和背景有较大的颜色反差,方便图像处理, 选用白色背景的水池。对鲤鱼进行录像,挑选其稳态游动时段,通过逐帧提 取,得到如图2-2所示的鲤鱼一个周期内的稳态游动时序图像。 =04953 =0528s =05623 0.595 =0.628s =0662s f=0695s =0.7289 =0.762s =0795s f=0828s f=0.895s f=0928s =0962s =0.995s =1.028s 图2-2鲤鱼稳态游动序列图像 Fig.2-2 Image sequences of carp swimming 鱼体保持运动状态,利用其运动信息,可以简单有效地把鱼体运动部分 从白色背景中提取出来。利用运动部分的位置和灰度信息,获得鱼体的二值 图像。再利用图像差分和二值化处理,把运动物体从复杂背景下分离出来, 得到鱼体的轮廓图,如图2-3所示。 鱼类游动的推进力主要由躯干带动尾鳍击水产生,而且,从鱼体游动的 时序图中,可以发现,沿鱼体游动方向,鱼体在胸鳍连线和体干线的交叉点 处的摆动波幅接近于零,因此,准确地提取出各时刻对应于鱼体躯干、尾鳍 和胸鳍的体干线是分析鱼游动机理的关键,也是获得其一维稳态游动运动学 模型最直接的依据。依据前文处理的二值图像,利用图像处理的相关搜索方 法B),可得到鱼体体干线时序图,如图2-4所示。 -11-
哈尔滨工业大学工学硕士学位论文 - 11 - 2.2.2 鱼体运动分析 在对鳍科推进模式一维稳态游动的仿生学研究中,通过拍摄鲤鱼的游动 录像,借助图像处理的手段,得到鱼体体干线的变化状态,作为分析鱼体的 游动机理和建立鱼体一维稳态游动运动学模型的依据。 拍摄过程中,为了造成鱼体和背景有较大的颜色反差,方便图像处理, 选用白色背景的水池。对鲤鱼进行录像,挑选其稳态游动时段,通过逐帧提 取,得到如图 2-2 所示的鲤鱼一个周期内的稳态游动时序图像。 图 2-2 鲤鱼稳态游动序列图像 Fig. 2-2 Image sequences of carp swimming 鱼体保持运动状态,利用其运动信息,可以简单有效地把鱼体运动部分 从白色背景中提取出来。利用运动部分的位置和灰度信息,获得鱼体的二值 图像。再利用图像差分和二值化处理,把运动物体从复杂背景下分离出来, 得到鱼体的轮廓图,如图 2-3 所示。 鱼类游动的推进力主要由躯干带动尾鳍击水产生,而且,从鱼体游动的 时序图中,可以发现,沿鱼体游动方向,鱼体在胸鳍连线和体干线的交叉点 处的摆动波幅接近于零,因此,准确地提取出各时刻对应于鱼体躯干、尾鳍 和胸鳍的体干线是分析鱼游动机理的关键,也是获得其一维稳态游动运动学 模型最直接的依据。依据前文处理的二值图像,利用图像处理的相关搜索方 法[39],可得到鱼体体干线时序图,如图 2-4 所示

哈尔滨工业大学工学硕士学位论文 0.495s =0.528s t=0.562s 0595 =0.628s t=0.662s =0.728s t=0.762s =0.795s =0.828s =0.895g t=0.928s t=0.962s t=0.995s t=1.028s 图2-3鲤鱼稳态游动轮廓序列图像 Fig.2-3 Image sequences of the outline of carp swimming {一 =0.495s =0.528s t=0.562s =0.595s =0.6283 =0.6623 =0.695s t=0.728s t=0.762s =0.795s t=0.828s t=0.895s { t=0.928s =0.962s t=0.995s t=1.028s 图2-4鲤鱼稳态游动体干曲线序列图像 Fig.2-4 Image sequences of the body curve of carp swimming 从体干线时序图中可以看出鱼游动时,产生从头至尾传播,波幅渐增的 行波,将其称为鱼体波。将上述体干线以波幅为零处作为基准点,集中到一 幅图像,得到鱼体一个游动周期内的体干线束,如图2-5所示。因为鱼的头 部不产生推进力,所以对其摆动不作研究。可以看出鱼体波波幅从基准点向 鱼尾方向渐增。 -12-
哈尔滨工业大学工学硕士学位论文 - 12 - 图 2-3 鲤鱼稳态游动轮廓序列图像 Fig. 2-3 Image sequences of the outline of carp swimming 图 2-4 鲤鱼稳态游动体干曲线序列图像 Fig. 2-4 Image sequences of the body curve of carp swimming 从体干线时序图中可以看出鱼游动时,产生从头至尾传播,波幅渐增的 行波,将其称为鱼体波。将上述体干线以波幅为零处作为基准点,集中到一 幅图像,得到鱼体一个游动周期内的体干线束,如图 2-5 所示。因为鱼的头 部不产生推进力,所以对其摆动不作研究。可以看出鱼体波波幅从基准点向 鱼尾方向渐增