重庆大学硕士学位论文 (a)Rocky 3 (b)Rocky 4 (c)Rocky 7 图1.3JPL研制的Rocky系列探测车 Fig.1.3 Rocky series rover developed by JPL 此外JPL还衍生出了一种具有高度自主控制能力的火星探测车FDO。FDO底 盘结构与Rocky系列探测车相似,该探测车的研发主要是对移动探测车的导航系 统、路径规划、障碍物识别等功能进行研究测试,其结构如图1.4(a)所示。 1997年7月4日,Rocky7的衍生型号“索杰纳”由美国国家航空航天局NASA) 成功的将其发上火星。“索杰纳”质量为11.5kg,外型尺寸为60cm×40cm×35cm,如 图1.4b)所示19。 1997年美国卡内基一梅隆大学机器人研究所在智利阿特卡马沙漠上测试了其 研制的Nomad野外探测机器人,Nomad行驶机构由可变形底盘、均化悬挂系统和 自包含轮组成,该机器人可保证在各种地形情况下四轮都能同时着地20,如图1.4 (c)所示。 (a)FIDO (b)Sojourner (c)Nomad 图1.420世纪90年代的轮式被动悬架移动机器人 Fig.1.4 Passive suspension mobile robots developed in 1990s 随着科学技术的发展,21世纪的移动式机器人性能得到了极大的增更强,智 能化程度更高,典型的如:2003年美国JPL成功研制的并登陆火星的探测车Mas Rover(漫游者),如图1.5(a)所示;2012年登陆火星的“好奇号”火星探测车,该探 测器是迄今为止最大的火星探测车,它是美国第四个火星探测器,也是第一辆采 用核动力驱动的火星车四,如图1.5(b)所示:瑞士联邦技术学院研制的虾式悬架的 探测机器人SHRIMP,该外型尺寸为60cm×23cm×15cm(长×宽×高),六个车轮均 为独立驱动,其中只有前后两轮可以独立转向,前轮与机身之间由一个类似平行 4
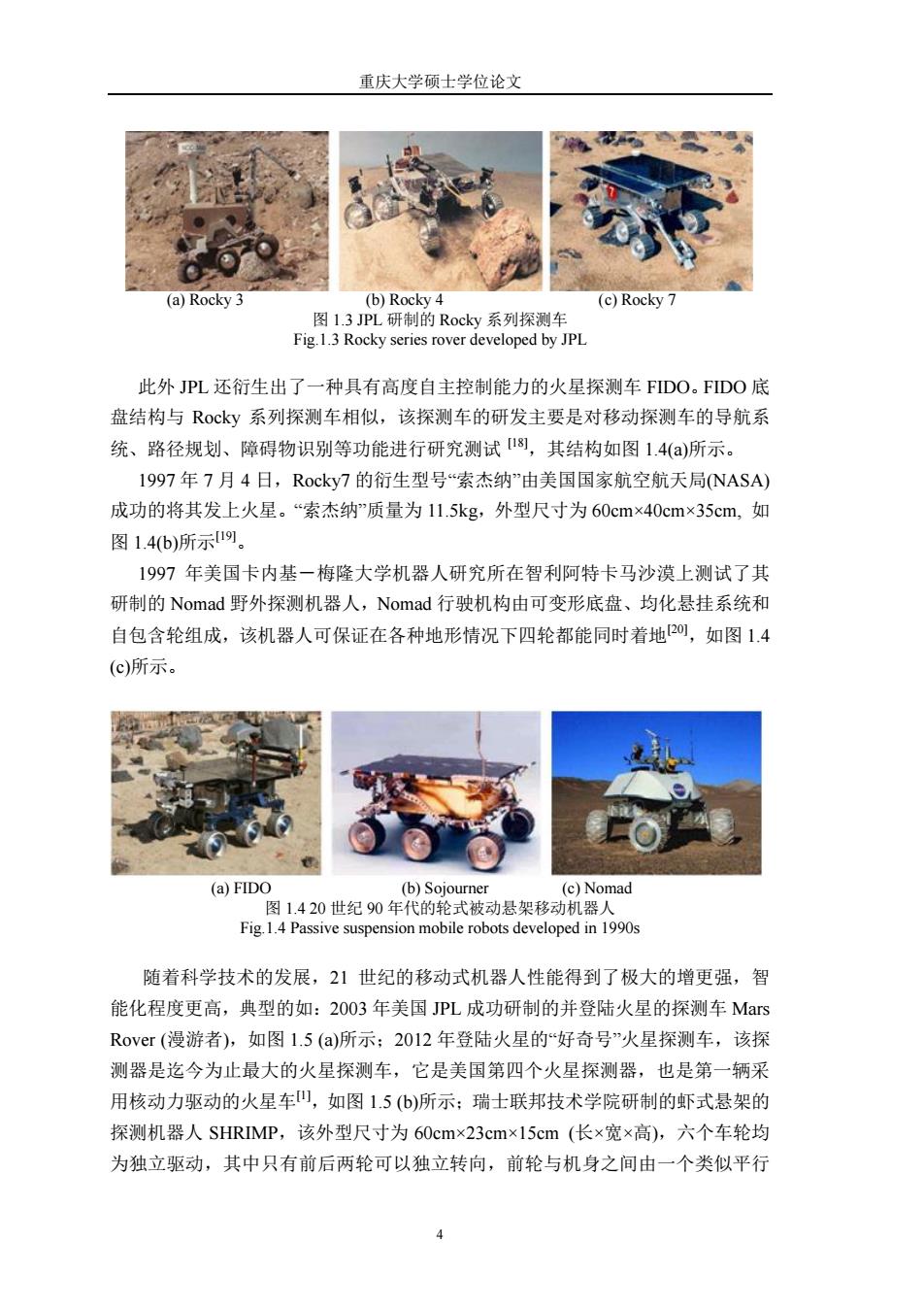
重庆大学硕士学位论文 4 (a) Rocky 3 (b) Rocky 4 (c) Rocky 7 图 1.3 JPL 研制的 Rocky 系列探测车 Fig.1.3 Rocky series rover developed by JPL 此外 JPL 还衍生出了一种具有高度自主控制能力的火星探测车 FIDO。FIDO 底 盘结构与 Rocky 系列探测车相似,该探测车的研发主要是对移动探测车的导航系 统、路径规划、障碍物识别等功能进行研究测试 [18],其结构如图 1.4(a)所示。 1997 年 7 月 4 日,Rocky7 的衍生型号―索杰纳‖由美国国家航空航天局(NASA) 成功的将其发上火星。―索杰纳‖质量为 11.5kg,外型尺寸为 60cm×40cm×35cm, 如 图 1.4(b)所示[19]。 1997 年美国卡内基-梅隆大学机器人研究所在智利阿特卡马沙漠上测试了其 研制的 Nomad 野外探测机器人,Nomad 行驶机构由可变形底盘、均化悬挂系统和 自包含轮组成,该机器人可保证在各种地形情况下四轮都能同时着地[20],如图 1.4 (c)所示。 (a) FIDO (b) Sojourner (c) Nomad 图 1.4 20 世纪 90 年代的轮式被动悬架移动机器人 Fig.1.4 Passive suspension mobile robots developed in 1990s 随着科学技术的发展,21 世纪的移动式机器人性能得到了极大的增更强,智 能化程度更高,典型的如:2003 年美国 JPL 成功研制的并登陆火星的探测车 Mars Rover (漫游者),如图 1.5 (a)所示;2012 年登陆火星的―好奇号‖火星探测车,该探 测器是迄今为止最大的火星探测车,它是美国第四个火星探测器,也是第一辆采 用核动力驱动的火星车[1],如图 1.5 (b)所示;瑞士联邦技术学院研制的虾式悬架的 探测机器人 SHRIMP,该外型尺寸为 60cm×23cm×15cm (长×宽×高),六个车轮均 为独立驱动,其中只有前后两轮可以独立转向,前轮与机身之间由一个类似平行
1绪论 四边形的机构相连。该探测车属于凹凸面地形自适应式,及在遇到直径约为60c 的凸台或者凹坑时,它能保证所有车轮接触到地面2四,其结构如图1.5(©)所示。 (a)Mars Rover (b)好奇号 (c)SHRIMP 图1.521世纪新一代轮式被动悬架移动机器人 Fig.1.5 New generation of passive suspension wheeled mobile robots of the 21st century ②国外轮腿式移动机器人发展概况 世界各国开发轮腿式机器人系统己经有多年历史,已经设计出了大量形态各 异的轮腿式机器人,如: JPL于1992年研制的Go-For机器人22。该机器人长0.4米,高0.4米,重3.5 千克。前后腿可进行大角度的旋转,以改变质量的分布,在翻倒时,可自己站立 起来,如图1.6(a)所示。 日本东京工业大学从1996年便开始研究一款轮腿式溜冰机器人 Roller--Walker。该机器人腿部末端是一个可以翻转的车轮,可以实现足式运动和平 面滚动相互切换。由于腿部末端的车轮无驱动,因此,该机器人在平面滚动时采 用溜滑方式产生向前驱动力,从而向前滚动23-2,其结构如图1.6(b)所示。 芬兰的赫尔辛基工业大学从1998年至今一直致力于研发一款具有承载能力 强、越障性能好,用以辅助人类生活为目的的四轮腿式移动机器人:WorkPartner, 该机器人由4条对称分布的的轮腿结构构成,各关节由关节电机驱动,每条轮腿 有大腿的转动、小腿的转动以及小腿端部电机的转动三个自由度,具有较好的地 形适应能力2,如图1.6(c)所示。 (a)Go-For (b)Roller-Walker (c)WorkPartner 图1.6四轮腿式移动机器人 Fig.1.6 Quadruped wheel-legged robots
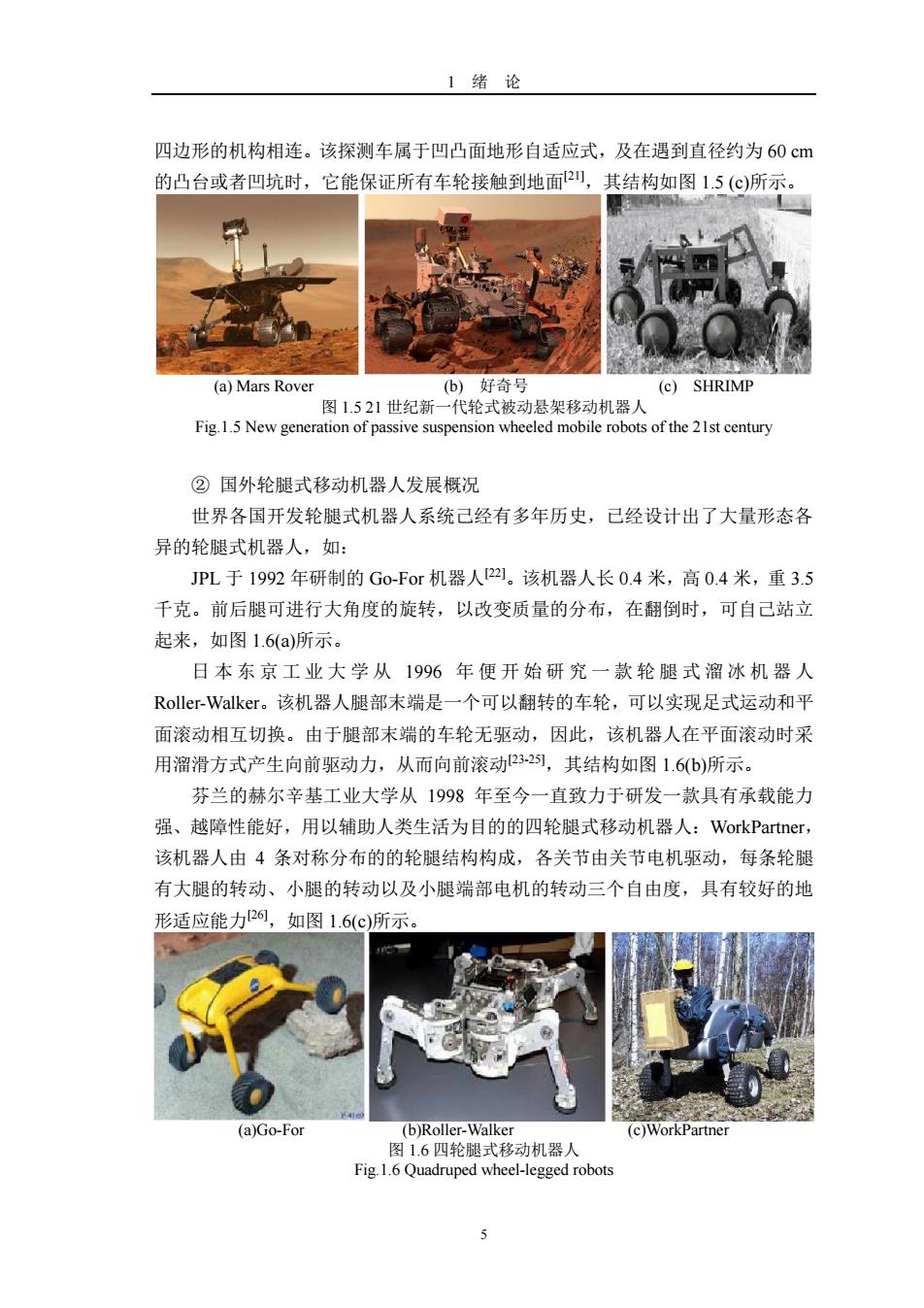
1 绪 论 5 四边形的机构相连。该探测车属于凹凸面地形自适应式,及在遇到直径约为 60 cm 的凸台或者凹坑时,它能保证所有车轮接触到地面[21],其结构如图 1.5 (c)所示。 (a) Mars Rover (b) 好奇号 (c) SHRIMP 图 1.5 21 世纪新一代轮式被动悬架移动机器人 Fig.1.5 New generation of passive suspension wheeled mobile robots of the 21st century ② 国外轮腿式移动机器人发展概况 世界各国开发轮腿式机器人系统己经有多年历史,已经设计出了大量形态各 异的轮腿式机器人,如: JPL 于 1992 年研制的 Go-For 机器人[22]。该机器人长 0.4 米,高 0.4 米,重 3.5 千克。前后腿可进行大角度的旋转,以改变质量的分布,在翻倒时,可自己站立 起来,如图 1.6(a)所示。 日 本 东 京 工 业 大 学 从 1996 年 便 开 始 研 究 一 款 轮 腿 式 溜 冰 机 器 人 Roller-Walker。该机器人腿部末端是一个可以翻转的车轮,可以实现足式运动和平 面滚动相互切换。由于腿部末端的车轮无驱动,因此,该机器人在平面滚动时采 用溜滑方式产生向前驱动力,从而向前滚动[23-25],其结构如图 1.6(b)所示。 芬兰的赫尔辛基工业大学从 1998 年至今一直致力于研发一款具有承载能力 强、越障性能好,用以辅助人类生活为目的的四轮腿式移动机器人:WorkPartner, 该机器人由 4 条对称分布的的轮腿结构构成,各关节由关节电机驱动,每条轮腿 有大腿的转动、小腿的转动以及小腿端部电机的转动三个自由度,具有较好的地 形适应能力[26],如图 1.6(c)所示。 (a)Go-For (b)Roller-Walker (c)WorkPartner 图 1.6 四轮腿式移动机器人 Fig.1.6 Quadruped wheel-legged robots
重庆大学硕士学位论文 2002年瑞士联邦工学院(EPFL)设计了一款足轮式越障机器人Octopus,该机器 人为关节处直接添加驱动电机,由两套并列的轮腿系统组成,每套系统由左右对 称的轮腿组成,每条轮腿的中部和端部安装有驱动轮,其结构如图1.7所示2刀。 Body Payload Support Arm Tactile Wheel 图1.7 Octopus足轮式越障机器人 Fig.1.7 Octopus Robot 2002年德国杜伊斯堡大学公布了其设计的一款采用液压驱动的轮腿式机器人 ALDURO,该机器人由四条轮腿组成,每条轮腿由四个液压缸驱动,轮腿末端有 一个车轮转动自由度28。其结构如图1.8所示。 2007年日本千叶理工学院公布了其设计的一款外形像个甲壳虫的轮腿式机器 人Halluc-Ⅱ,该机器人有8条轮腿,每条轮腿末端具备一个轮式与腿式的转换自由 度,每条轮腿有4个转向关节,整个机器人共配备了多达56个电机2y,Halluc-.Ⅱ 在水平地面上滚动时,将末端的驱动轮胎面与地面接合,进行滚动前进。在步态 行走时,将车轮的端面与地面贴合,从而迈步向前,其结构如图1.9所示。 flexion 301 extension 0 [90°1 extension flexion 90°1 [301 图1.8 ALDURO机器人 Fig.1.8 ALDURO Robot 6
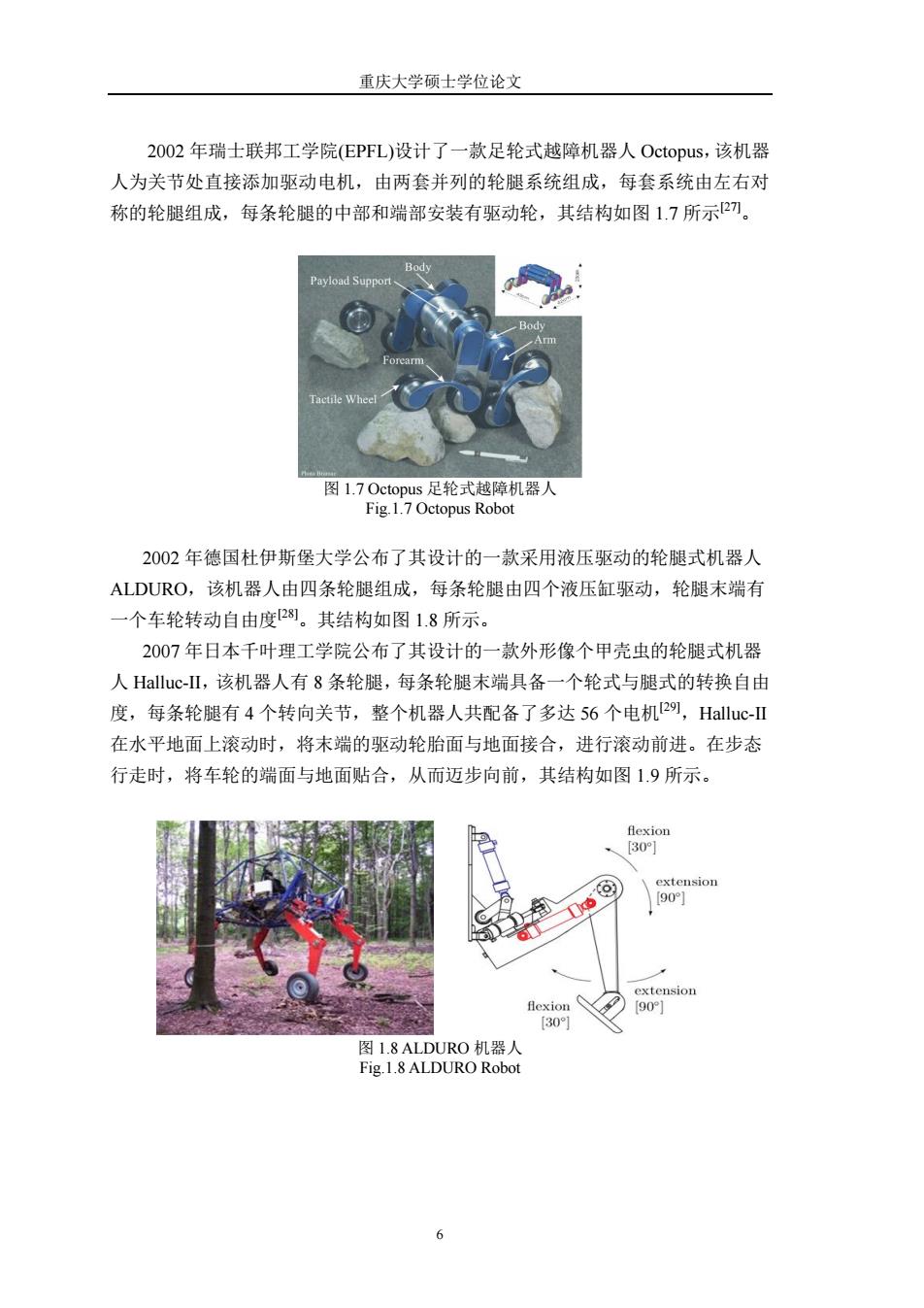
重庆大学硕士学位论文 6 2002 年瑞士联邦工学院(EPFL)设计了一款足轮式越障机器人 Octopus,该机器 人为关节处直接添加驱动电机,由两套并列的轮腿系统组成,每套系统由左右对 称的轮腿组成,每条轮腿的中部和端部安装有驱动轮,其结构如图 1.7 所示[27]。 图 1.7 Octopus 足轮式越障机器人 Fig.1.7 Octopus Robot 2002 年德国杜伊斯堡大学公布了其设计的一款采用液压驱动的轮腿式机器人 ALDURO,该机器人由四条轮腿组成,每条轮腿由四个液压缸驱动,轮腿末端有 一个车轮转动自由度[28]。其结构如图 1.8 所示。 2007 年日本千叶理工学院公布了其设计的一款外形像个甲壳虫的轮腿式机器 人 Halluc-II,该机器人有 8 条轮腿,每条轮腿末端具备一个轮式与腿式的转换自由 度,每条轮腿有 4 个转向关节,整个机器人共配备了多达 56 个电机[29],Halluc-II 在水平地面上滚动时,将末端的驱动轮胎面与地面接合,进行滚动前进。在步态 行走时,将车轮的端面与地面贴合,从而迈步向前,其结构如图 1.9 所示。 图 1.8 ALDURO 机器人 Fig.1.8 ALDURO Robot
1绪论 图1.9 Halluc-I轮腿式机器人 Fig.1.9 Halluc-II wheel-legged robot 2007年加拿大麦吉尔大学设计了一款弹跳式轮腿式机器人PAW Robot,该机 器人的设计是用于探索轮腿混合式移动系统的运动模式,该机器人轮腿转动髋关 节和车轮关节之间设计有一个独特的线性弹簧,该结构用于探索使用弹簧减震系 统来实现机器人转弯运动、奔跑以及跳跃等动态稳定步态0。整机重约20kg,长 0.5m宽0.36m,髋关节驱动电机功率为90w,其结构如图1.10所示。 图1.10 PAW Robot轮腿式机器人 Fig.1.10 PAW Robot wheel-legged robot 2008年大阪大学设计出了一款六轮腿式移动机器人ASTERISK H,其结构如 图1.11所示。该机器人在步态行走以及跨越障碍时,可使用三条轮腿作为机体支 撑,移动另外三条腿来进行机器人的移动B。 oim(75:+75 Idegl eim4-120:+120) Link2 Body Side View 图1.11 ASTERISK H六轮腿式移动机器人 Fig.1.11 ASTERISK H wheel-legged robot
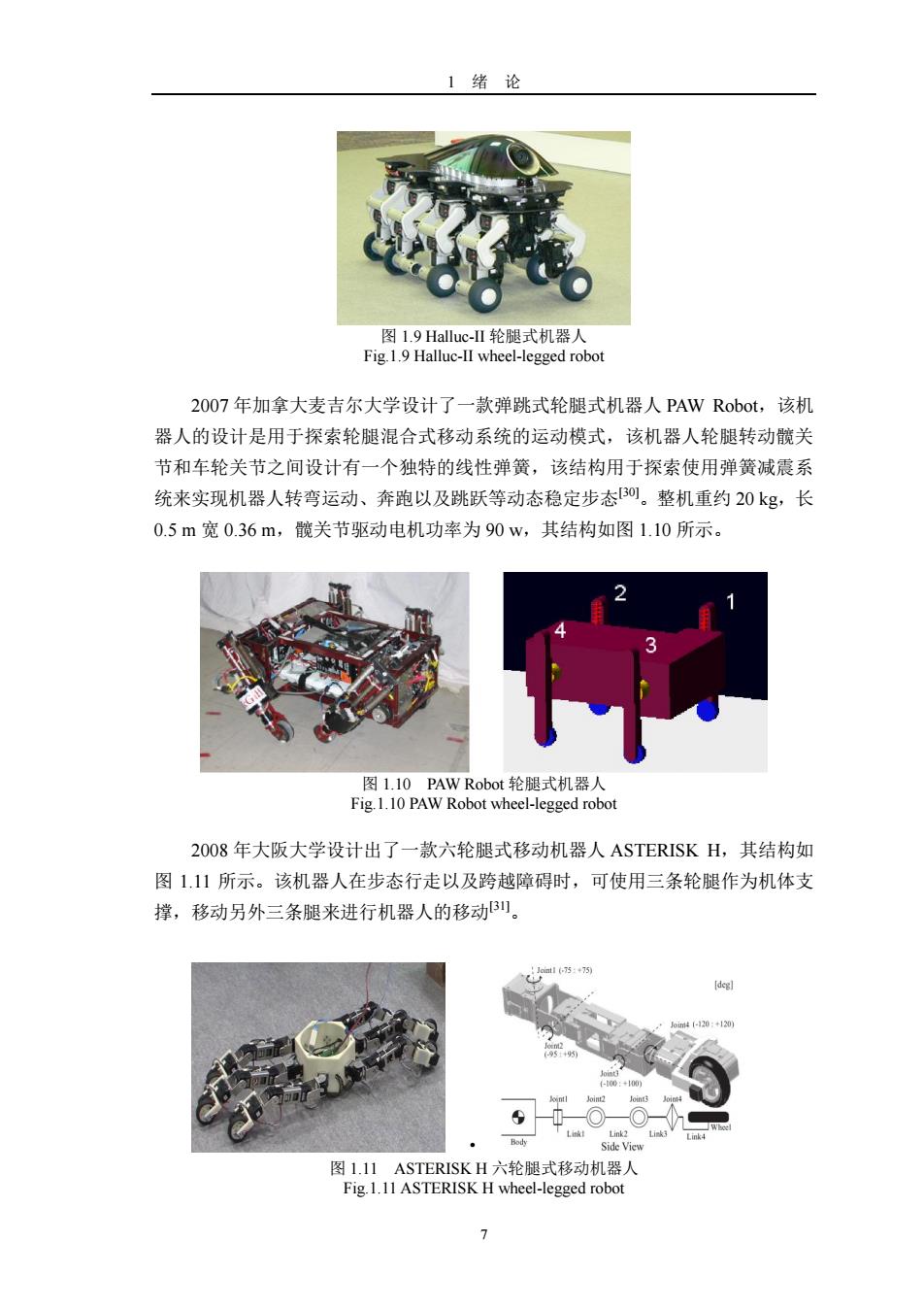
1 绪 论 7 图 1.9 Halluc-II 轮腿式机器人 Fig.1.9 Halluc-II wheel-legged robot 2007 年加拿大麦吉尔大学设计了一款弹跳式轮腿式机器人 PAW Robot,该机 器人的设计是用于探索轮腿混合式移动系统的运动模式,该机器人轮腿转动髋关 节和车轮关节之间设计有一个独特的线性弹簧,该结构用于探索使用弹簧减震系 统来实现机器人转弯运动、奔跑以及跳跃等动态稳定步态[30]。整机重约 20 kg,长 0.5 m 宽 0.36 m,髋关节驱动电机功率为 90 w,其结构如图 1.10 所示。 图 1.10 PAW Robot 轮腿式机器人 Fig.1.10 PAW Robot wheel-legged robot 2008 年大阪大学设计出了一款六轮腿式移动机器人 ASTERISK H,其结构如 图 1.11 所示。该机器人在步态行走以及跨越障碍时,可使用三条轮腿作为机体支 撑,移动另外三条腿来进行机器人的移动[31]。 · 图 1.11 ASTERISK H 六轮腿式移动机器人 Fig.1.11 ASTERISK H wheel-legged robot
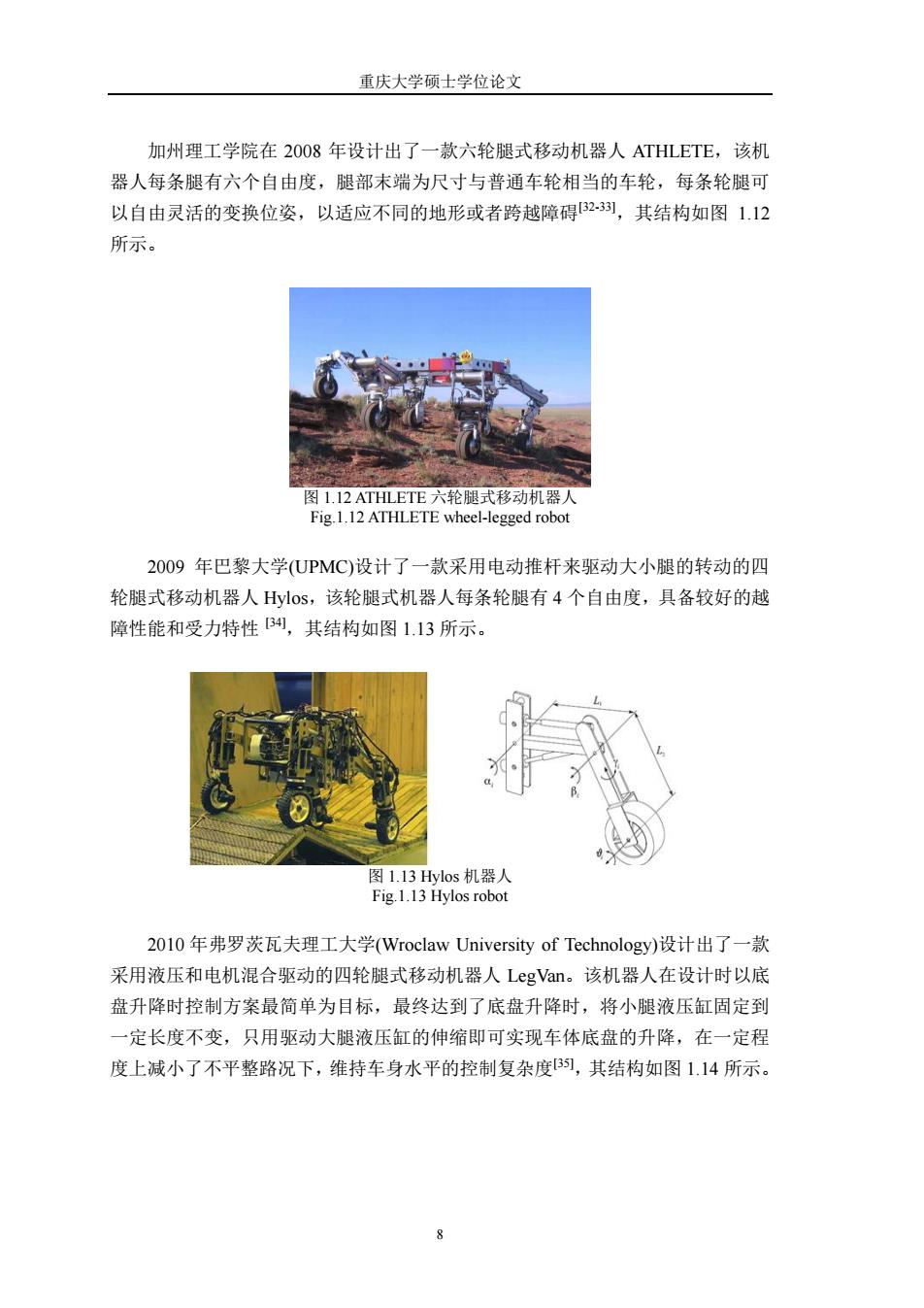
重庆大学硕士学位论文 加州理工学院在2008年设计出了一款六轮腿式移动机器人ATHLETE,该机 器人每条腿有六个自由度,腿部末端为尺寸与普通车轮相当的车轮,每条轮腿可 以自由灵活的变换位姿,以适应不同的地形或者跨越障碍23),其结构如图1.12 所示。 图1.12 ATHLETE六轮腿式移动机器人 Fig.1.12 ATHLETE wheel-legged robot 2009年巴黎大学(UPMC)设计了一款采用电动推杆来驱动大小腿的转动的四 轮腿式移动机器人yos,该轮腿式机器人每条轮腿有4个自由度,具备较好的越 障性能和受力特性B4,其结构如图1.13所示。 图1.13ylos机器人 Fig.1.13 Hylos robot 20l0年弗罗茨瓦夫理工大学(Wroclaw University of Technology)设计出了一款 采用液压和电机混合驱动的四轮腿式移动机器人LegVan.。该机器人在设计时以底 盘升降时控制方案最简单为目标,最终达到了底盘升降时,将小腿液压缸固定到 一定长度不变,只用驱动大腿液压缸的伸缩即可实现车体底盘的升降,在一定程 度上减小了不平整路况下,维持车身水平的控制复杂度3)],其结构如图1.14所示。 8
重庆大学硕士学位论文 8 加州理工学院在 2008 年设计出了一款六轮腿式移动机器人 ATHLETE,该机 器人每条腿有六个自由度,腿部末端为尺寸与普通车轮相当的车轮,每条轮腿可 以自由灵活的变换位姿,以适应不同的地形或者跨越障碍[32-33],其结构如图 1.12 所示。 图 1.12 ATHLETE 六轮腿式移动机器人 Fig.1.12 ATHLETE wheel-legged robot 2009 年巴黎大学(UPMC)设计了一款采用电动推杆来驱动大小腿的转动的四 轮腿式移动机器人 Hylos,该轮腿式机器人每条轮腿有 4 个自由度,具备较好的越 障性能和受力特性 [34],其结构如图 1.13 所示。 图 1.13 Hylos 机器人 Fig.1.13 Hylos robot 2010 年弗罗茨瓦夫理工大学(Wroclaw University of Technology)设计出了一款 采用液压和电机混合驱动的四轮腿式移动机器人 LegVan。该机器人在设计时以底 盘升降时控制方案最简单为目标,最终达到了底盘升降时,将小腿液压缸固定到 一定长度不变,只用驱动大腿液压缸的伸缩即可实现车体底盘的升降,在一定程 度上减小了不平整路况下,维持车身水平的控制复杂度[35],其结构如图 1.14 所示